In this work, we present advanced investigations and treatments for the problem of a restricted vibrating motion of a connected gyrostat with a spring. It is supposed that the gyrostat spins slowly about the minor or major principal axis of the inertia ellipsoid. The gyrostat is acted upon by a gyrostatic couple vector besides the action of Newtonian and electromagnetic fields. The approach of the large parameter is applied to obtain the periodic solutions for the governing system of equations of motion of the gyrostat. A geometric illustration using the angles of Euler is given for such motion to evaluate and analyze the gyrostatic motion at any instant. The analysis of the obtained solutions is considered in terms of numerical data throughout computer programs. Characterized parametric data are assumed through one of the numerical methods for obtaining numerical solutions that prove the validity of the analytical obtained periodic solutions. The obtained solutions, besides the phase diagrams, have been drawn to describe these solutions’ periodicity and stability procedures. The novelty of this work comes from the imposition of a new initial condition that does not restrict movement around the dynamic symmetry axis. This assumption allows the use of a new technique for the solution called the large parameter. This technique gives solutions in a completely new domain that are different from the ones studied in previous works.
Numerous researchers were interested in the dynamics of a six-degrees-of-freedom (DOF) rigid body (RB) with a single fixed-point, for example.1–13 The reason is due to its several applications in particle life, like airplanes, submarine vehicles, spacecraft, and other applications that depend on the gyroscopic theory. It is considered in,1 the problem of the motion of an asymmetric solid body rotating around a fixed under the influence of a uniform field of gravitational attraction. Applying the angular momentum principle,2 the system of EOM was derived for the body’s motion in addition to the three first integrals. According to various restrictions on the location of the center of mass and the values of the main axes of inertia, the complete solution to this problem has been established in some specific circumstances.3–8 In Ref. 6–8, the authors proved the existence of a fourth algebraic integration only in the two special states, which are like the Euler and Lagrange ones, besides the kinetic symmetry state for the body. The other states with integrals of single-valued are not new but should be transferred to the two previous states. Also, the complex approach for investigating rigid body motion about a fixed-point is considered, depending on the Euler angles and Poinsot’s modifications.
Based on the EOM and first integrals, an autonomous system of 2DOF is obtained in Ref. 9–13 with one integral. The authors considered the action of a gyrostatic moment (GM) and the Newtonian field of force (NFF) on the body’s motion when the values of the main axes have different values,9 for the situations of Euler-Poinsot,10 Kovalevskaya,11,12 and the disc’s case.13 This system is solved analytically using the Poincaré approach of small parameters and represented in various plots to give a full interpretation of the obtained results. The stability of these results have been examined and analyzed.
This system’s numerical solutions14,15 are obtained by applying the Runge-Kutta technique of the fourth order. The effects of the body characteristic parameters are given to illustrate the rotary behavioral movement.16 Two cases are given to study; the first was considered when the center of attraction is located on the downward vertical axis, while the second was investigated when the center of gravity is located on an upward vertical.17 A comparison of solutions to the two previously mentioned cases is acquired using computerized illustrations. In Ref. 18, the method of the large parameter is applied for solving the slow spin motion for a disc that rotates about a point that is fixed in space coordinates. The authors in Ref. 19 presented enough necessary conditions for the existence of a fourth elementary integral, which is considered an additional one. In Ref. 20,21, the author studied the motion of a gyro like a Lagrange gyroscope in which the gyro’s torque was applied about one of the main axes when the body is subjected to a uniform field, whether gravitational or NFF. In Ref. 22, the author presented the rotational motion for an RB in the NFF exerted from three centers of attraction. In Ref. 23, the analytic solution for a free rotatory motion under the influence of a motor of limited power is investigated. The author aims to prove that the motion of the carrier body is close to rotation about a fixed axis, depending upon the problem’s parameters and the initial conditions. Methods of tensor calculus, the asymptotic method, and kinematic equations of motion are used. Results obtained over a long period of time include the asymptotic properties of solutions and a system of linear differential equations that describes the approximate gyrostat motion. The conclusion for the motion of the carrier body, which is close to rotation around an axis, is considered.
In this study, we present a new class for restricted gyro motion that rotates with a non-stationary perturbation torque vector besides a restoring one that varies slowly with time. New analytical and numerical solutions to this problem in a general case are achieved. Solutions are investigated when the stiffened force affects the body. The average method using the large parameter24,25 is applied to investigate approximated solutions of the first order for different situations. The stability by using the phase diagram procedure for the obtained periodic solutions is studied according to the variation of the body parameters for each case. This problem is considered one of the most applied problems in both military and civil life. The reason comes from the wide applications in aircraft, spacecraft, compasses, and submarines.
The problem considerations
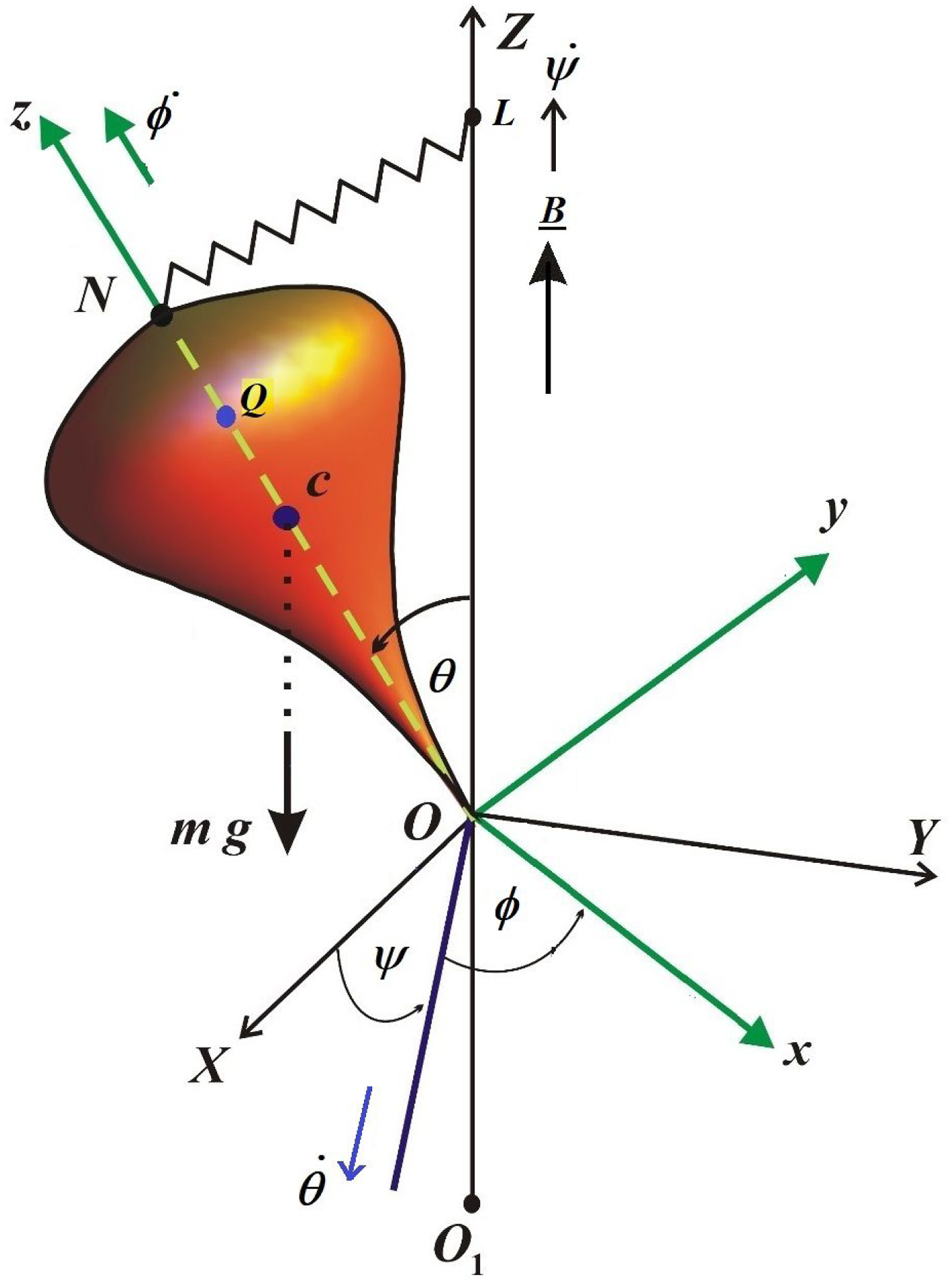
Let us consider the dynamically symmetric gyrostat of mass rotates about a fixed-point and is attached to a spring at some point with a fixed end at the point , (see Figure 1). Consider the two frames of coordinate systems: The fixed coordinate in space , and another moving one attached to the body. If the direction of the vector of the point to the point is . Take the mobile system axes in the direction of the principal inertia ones. Consider and represent the angles of Euler.
Shows restricted dynamical symmetric gyrostat.
The acting forces of this body are the uniform gravitational force field, the Newtonian force resulting from the center , addition of the restoring torques, and perturbed ones and , respectively. If we consider being the spring stiffness, then the body suffers also from elastic force according to Hook’s low26
where is the length of the spring with deformation . As the spring has hardened, the elastic force yields a restoring torque in the form
where and is the gravity acceleration.
Let the body rotate around the symmetry -axis in an electromagnetic force field consisting of a charge lying on that axis and a vertical magnetic field of strength Let be the vector of the linear velocity for this rotation. The Lorentz force is obtained in the form 27 which gives a restoring torque on the form
where represents the distance between and . We note that is dependent on the components and of the angular velocities, the inertia moments and , and on . Thus, from the above description and equations (2) and (3), we deduce that the gyrostat acted upon the gravity force, NFF, with the restoring torque .
Assuming the center of gravity and inertia moments are
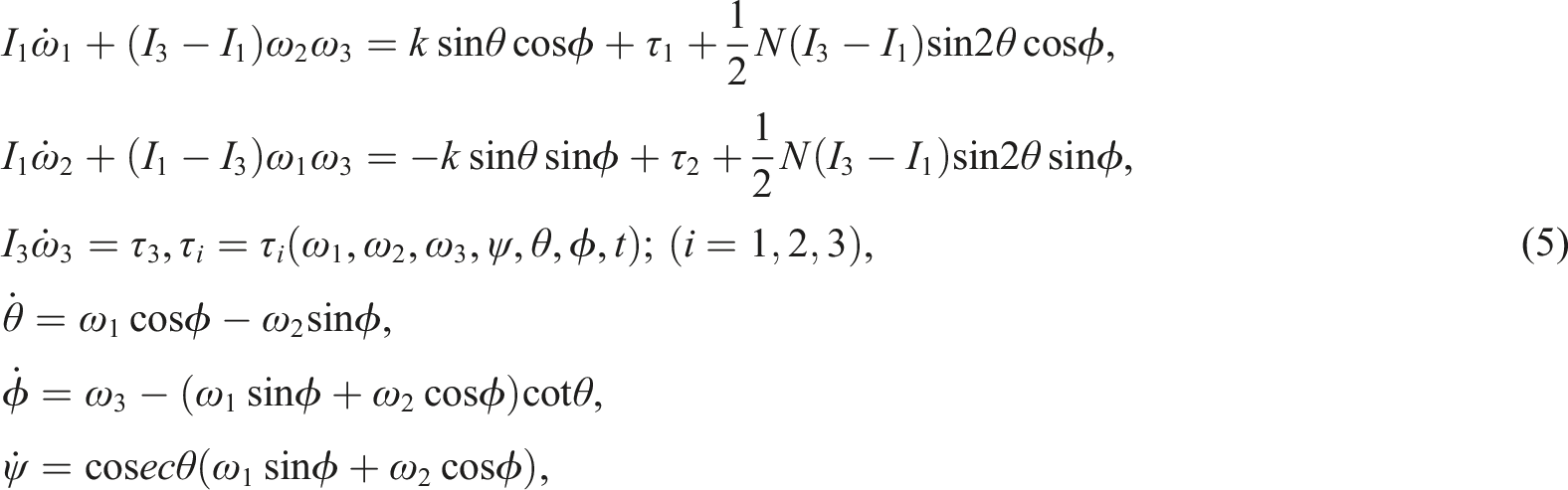
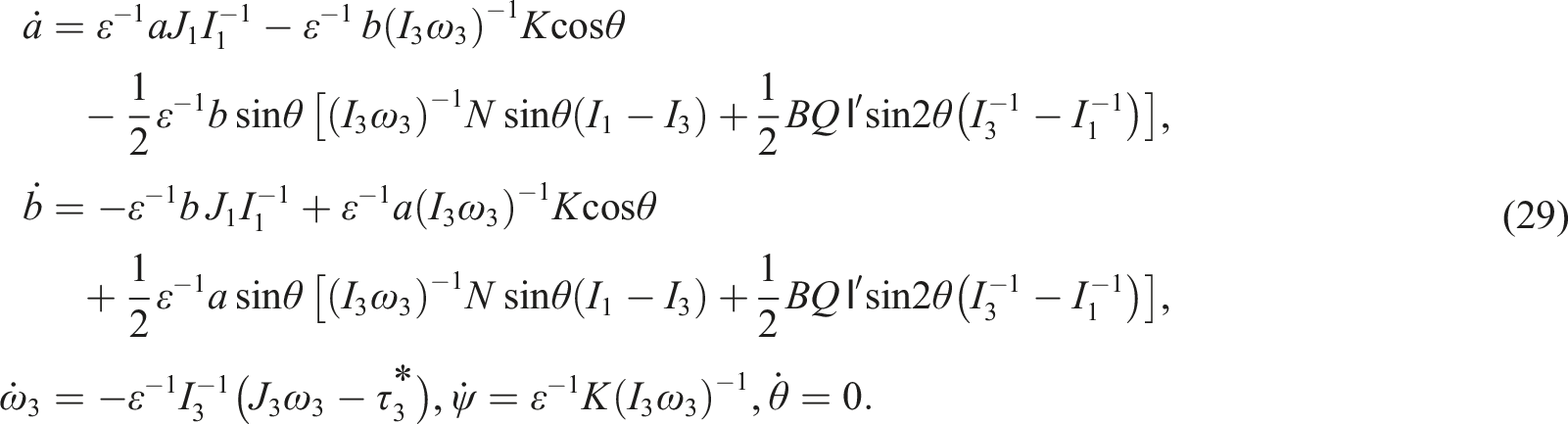
Supposing are the torques to the principal inertia axes for the body go through and is the constant of the gravity. Let us assume the gyro rotates about a fixed-point , in the existence of a restoring torque vector and perturbation moments depending on a slow time . Where is a sufficiently large parameter distinguishes the magnitude of the perturbation and the time is . The differential equations for the moving system take the following forms28,29
where are the angular velocity components around the axes , respectively; and and are the center of mass coordinates of the body.
We assume that the perturbed torques are functions of a period of and . Consider the maximum value of the varied restoring torque is
We note that at the equation (5) yield a similar case to Lagrange-Poisson. For equation (5) give the uniform Lagrange-Poisson problem. Besides, equation (5), when present the motion for the Lagrangian top influenced by perturbations of different natural origins, as well as the motion for a uniform solid body to its mass center when that object is subjected to a restoration torque due to the forces of aerodynamics and some perturbed torques.
Let us consider the initial conditions
Conditions (7) show that the angular velocity components are taken as a smaller valued in direction of the axes and . The two projections for the perturbed torque vector of concern on the inertia main axes of the gyrostat are small compared with the restored torque , whereas is of the same size as that torque.
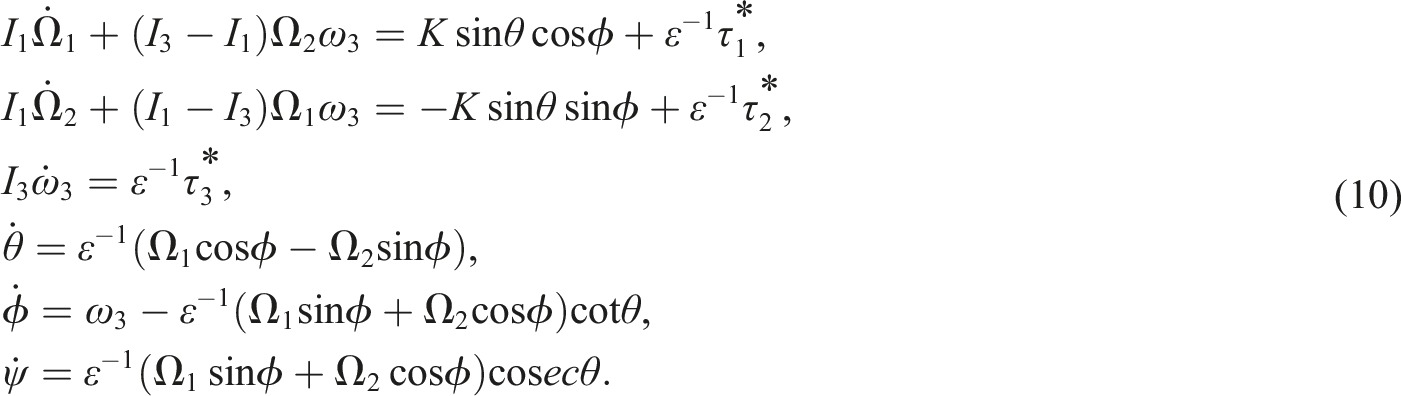
Assumptions (7) help us to present the large parameter and assignment
The newly introduced variables and constants and are supposed to bounded quantities from order unity when going to infinity. Under assumptions (7) and (8), the approximated solutions for system (5) when is sufficiently large will be considered. The averaging procedure is used through the large parameter to solve this problem on an interval of time with the order . We consider the following two cases, which are classified according to the restoring torque.
The variable restored torque
From assumptions (6) and (7), the restoring torque resultant is written as follows
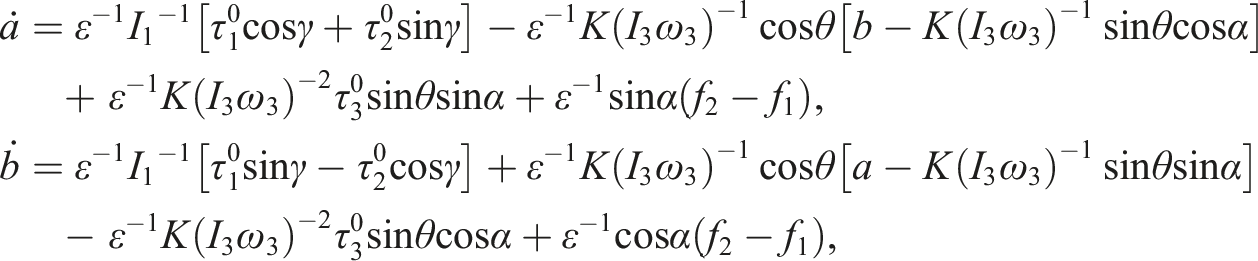
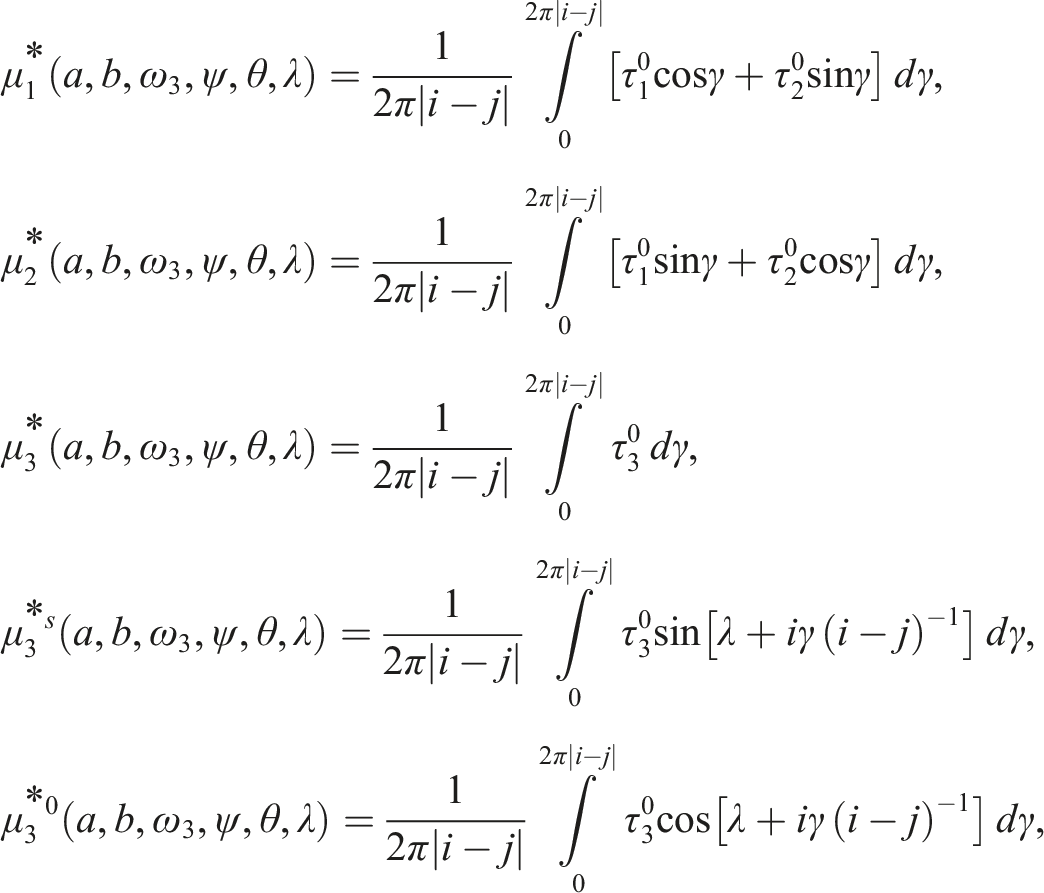
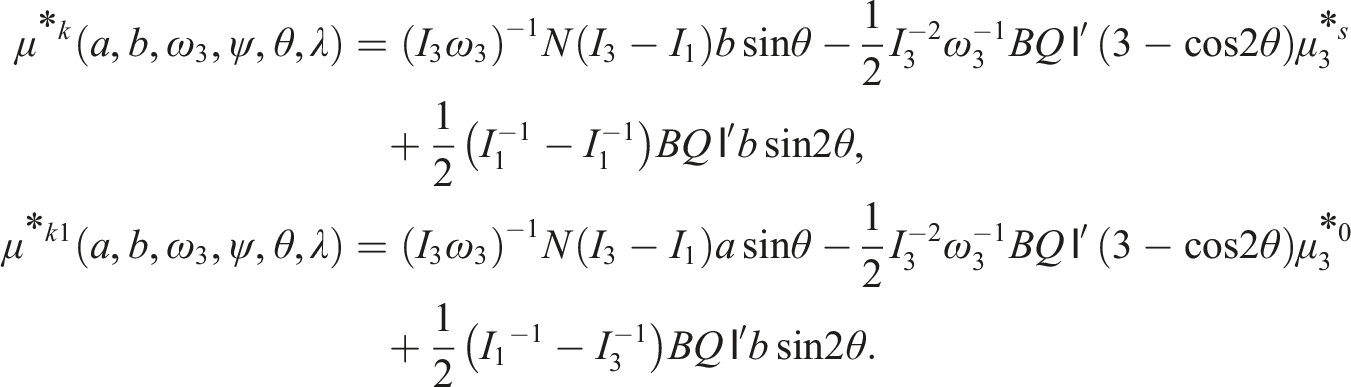
Using (5), (8), and (9) and cancelling on both sides of the first two equations, one gets
Therefore, we have obtained the first approximate solution for the considered system with the slow variables and dissipative torque case (27). If the resonance condition (22) is investigated, then the averaging must be obtained in analogously to the scheme (26). For this case, the integral relations in (26) coincide with the corresponding formulas for (23). Thus, the resonance does not accumulate until the resulting solution is suitable to describe the motion of any ratio
Numerical considerations
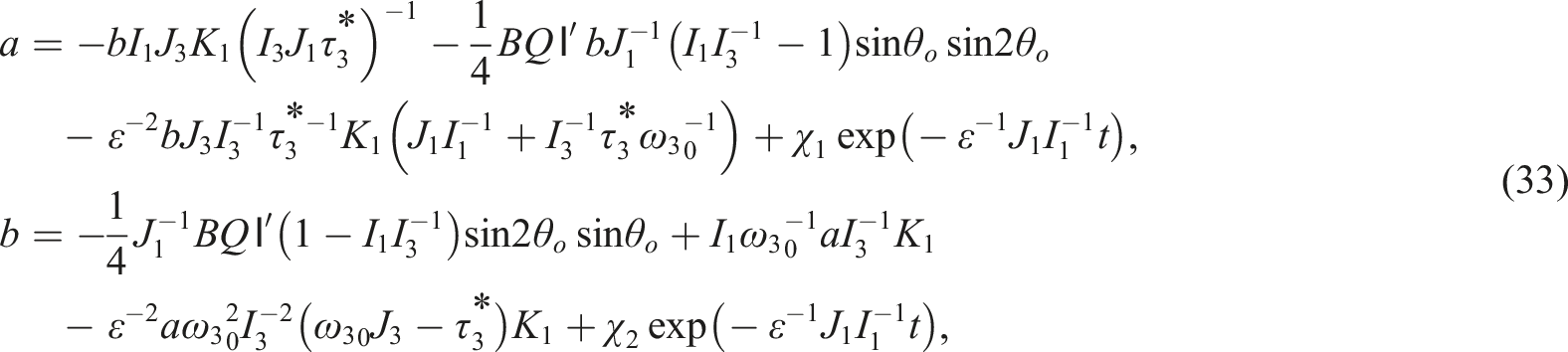
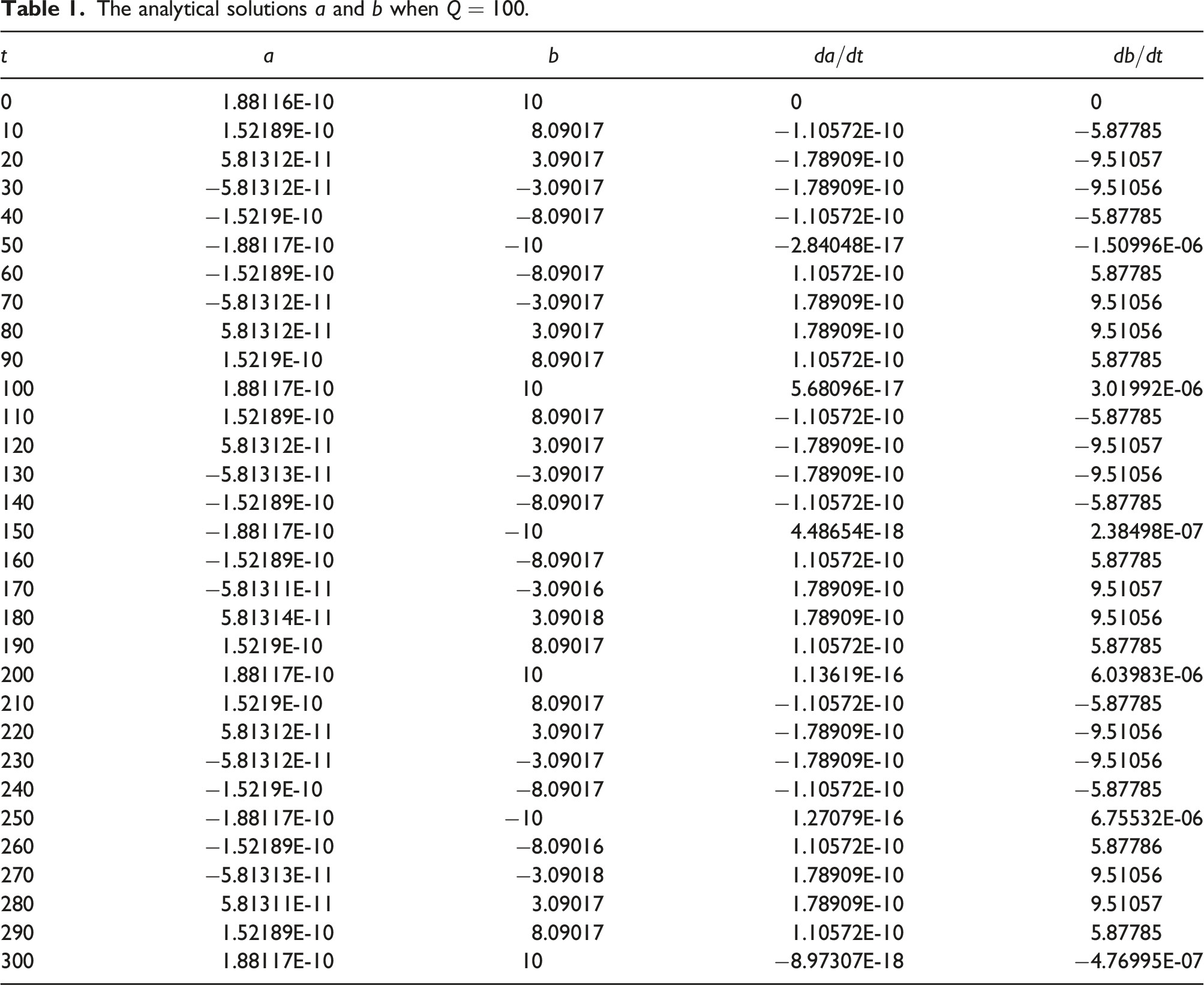
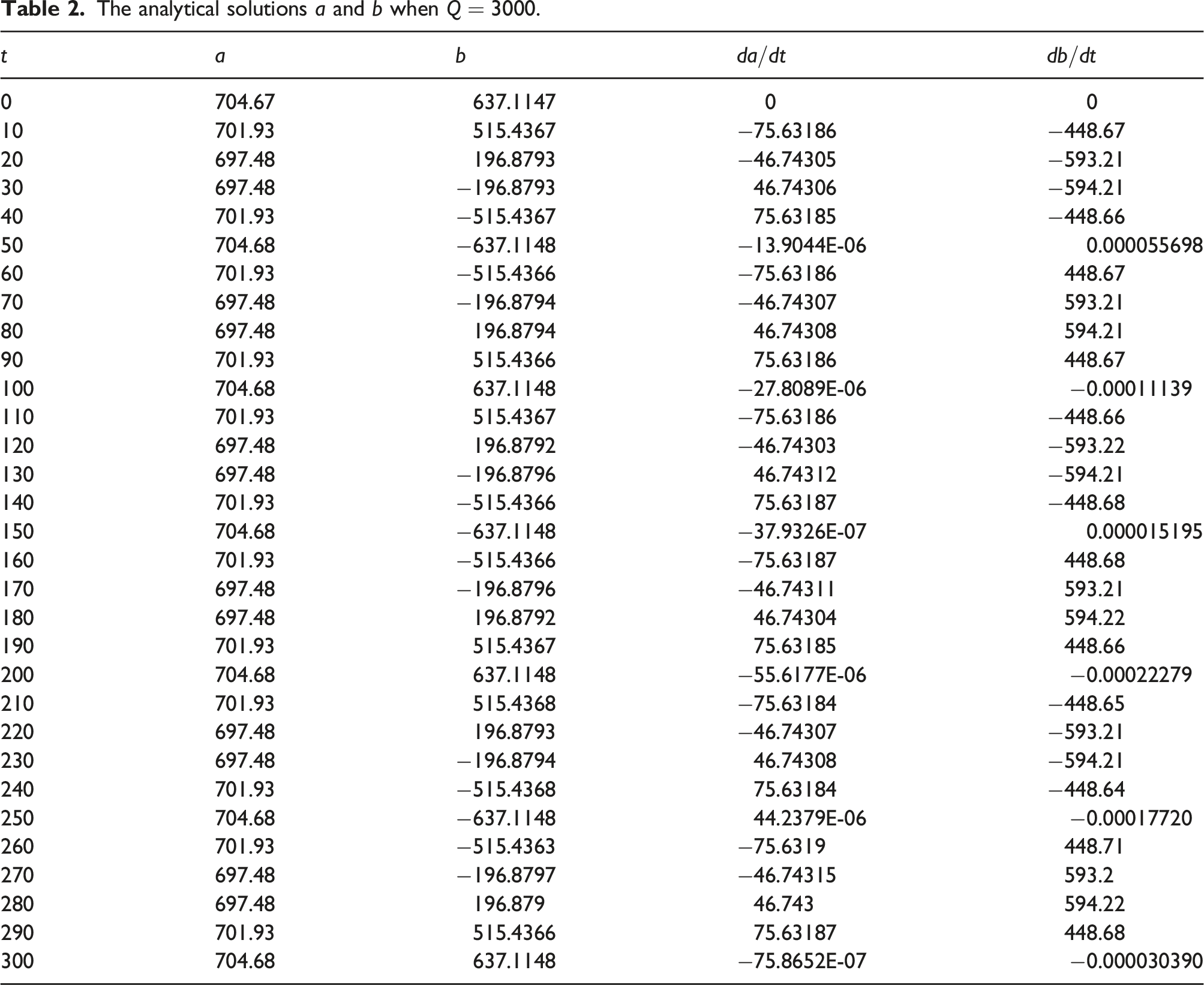
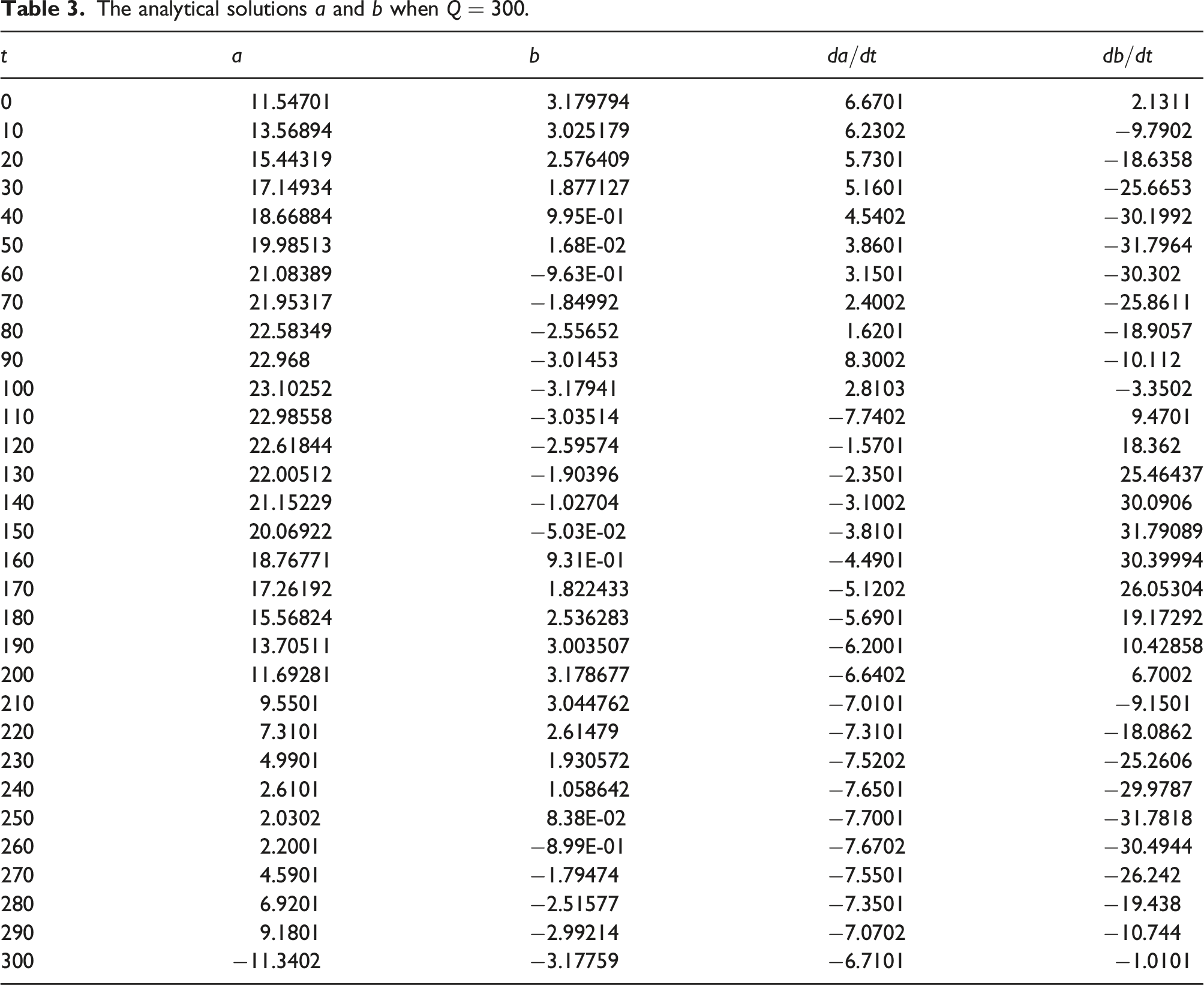
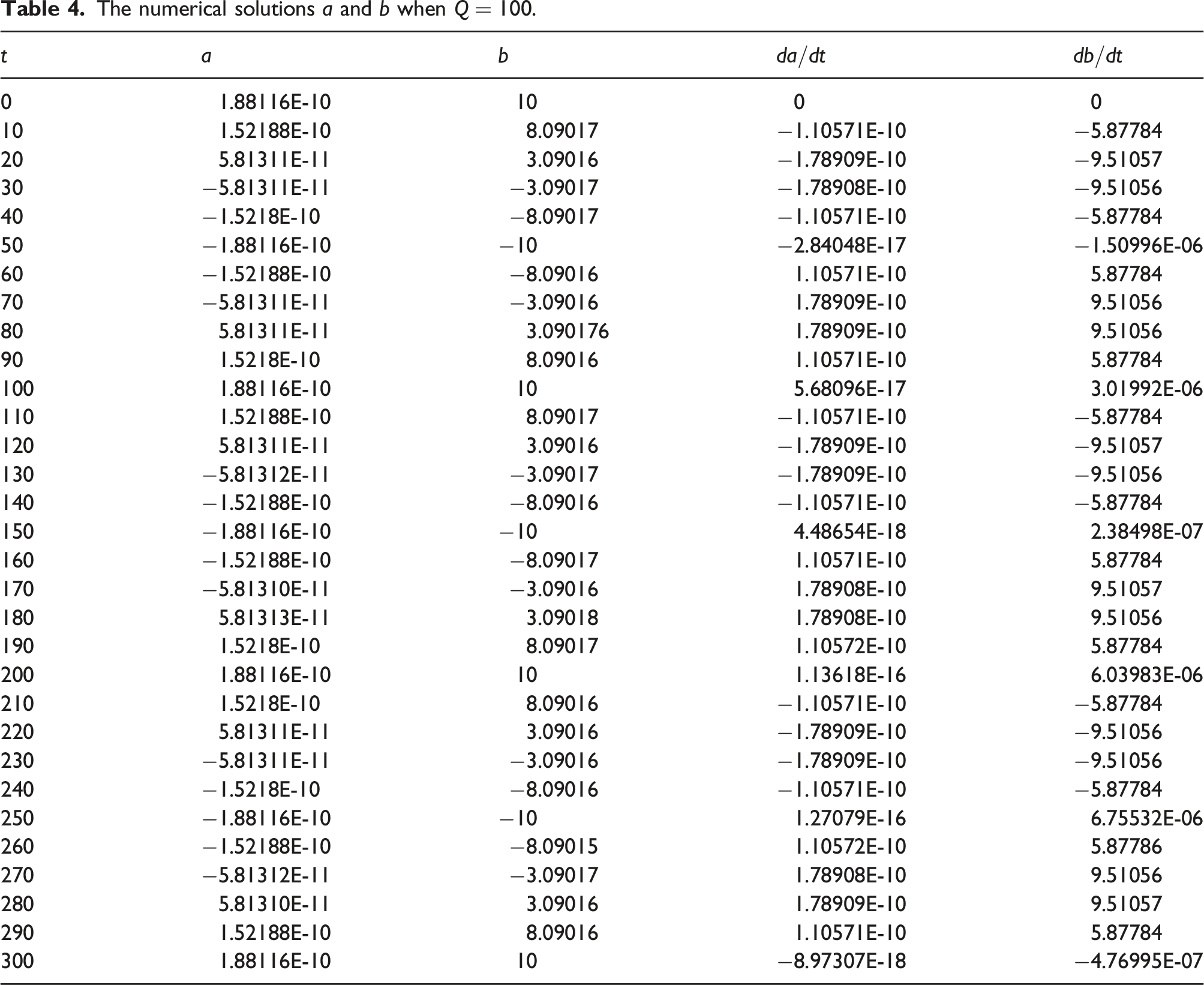
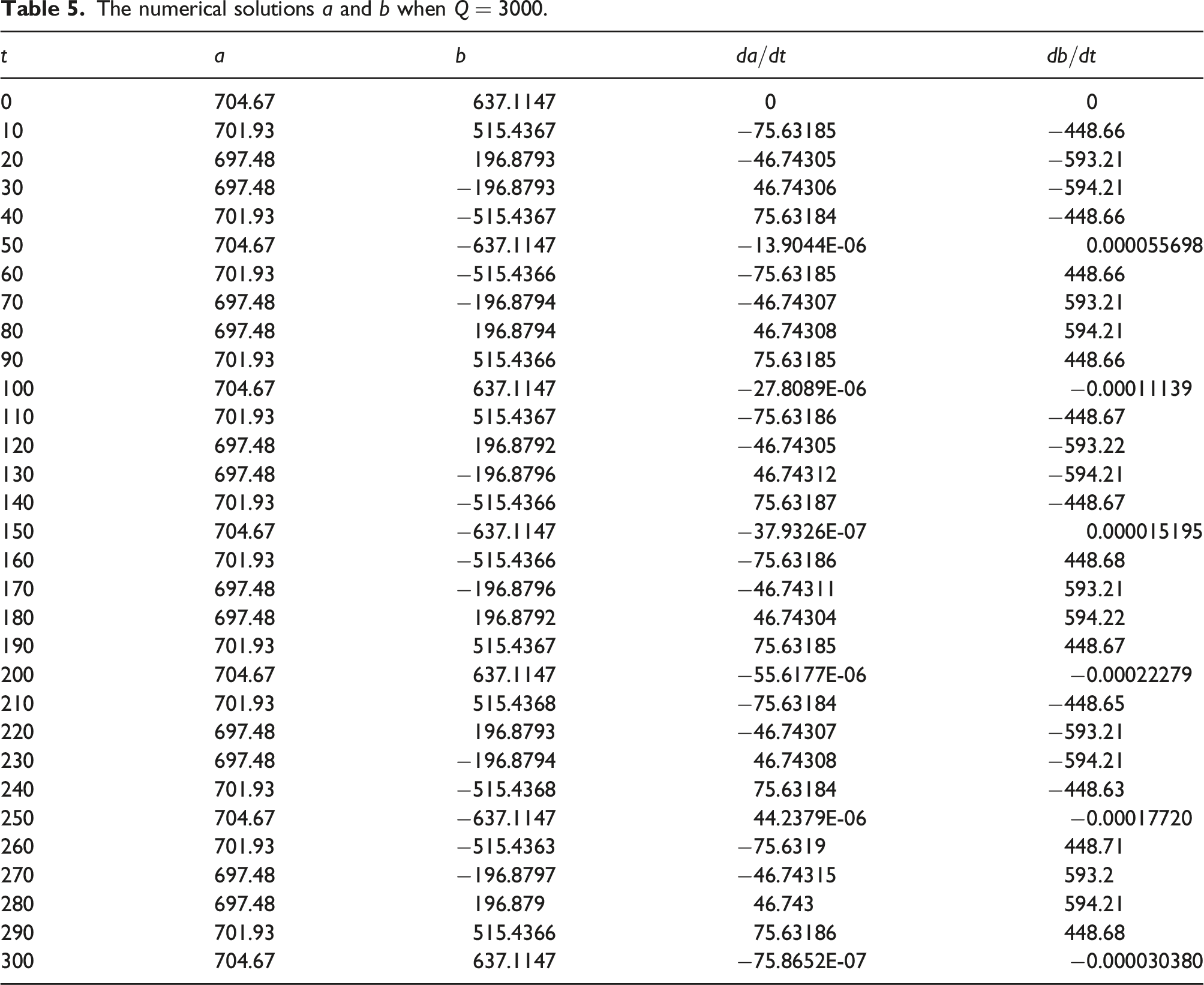
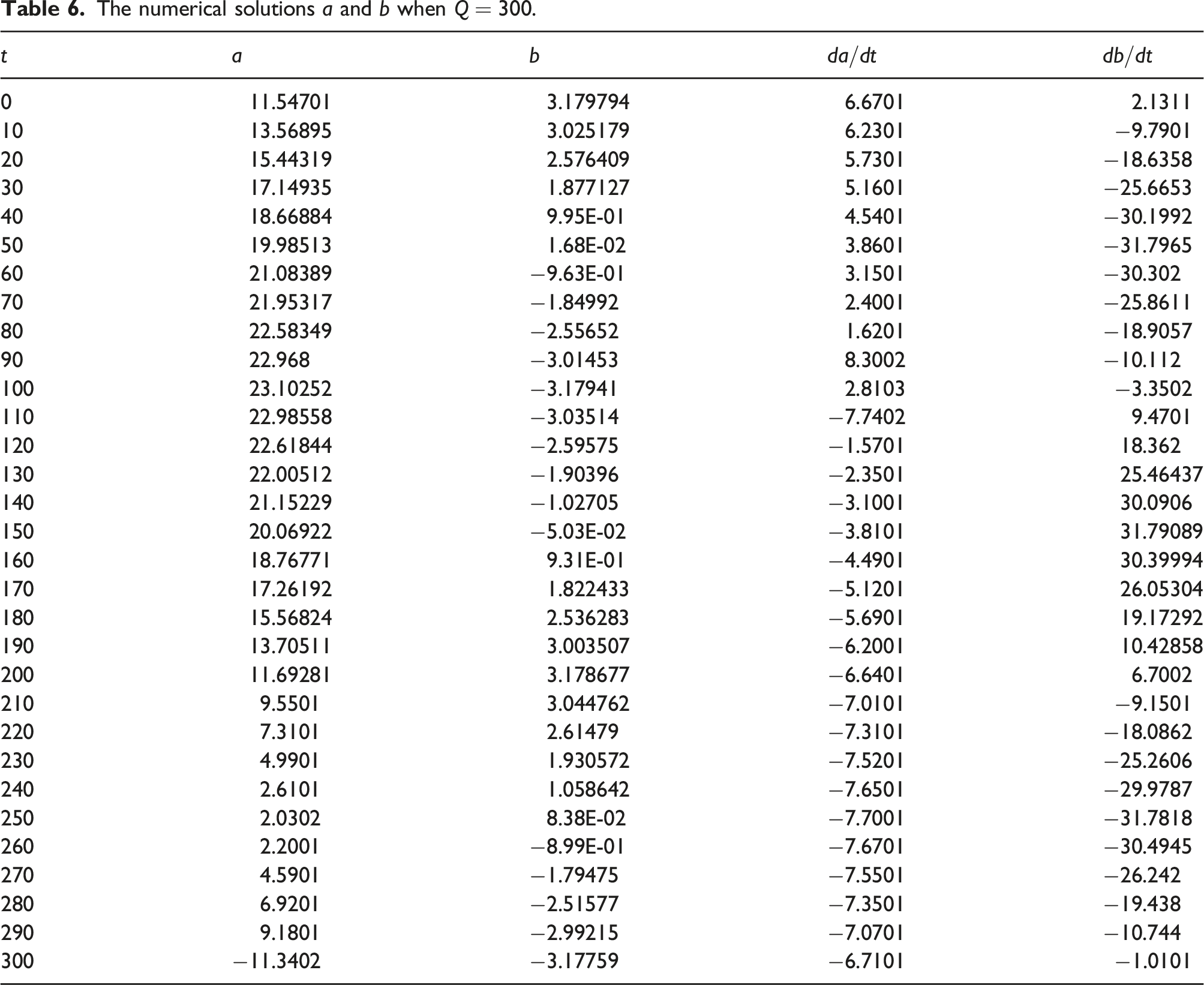
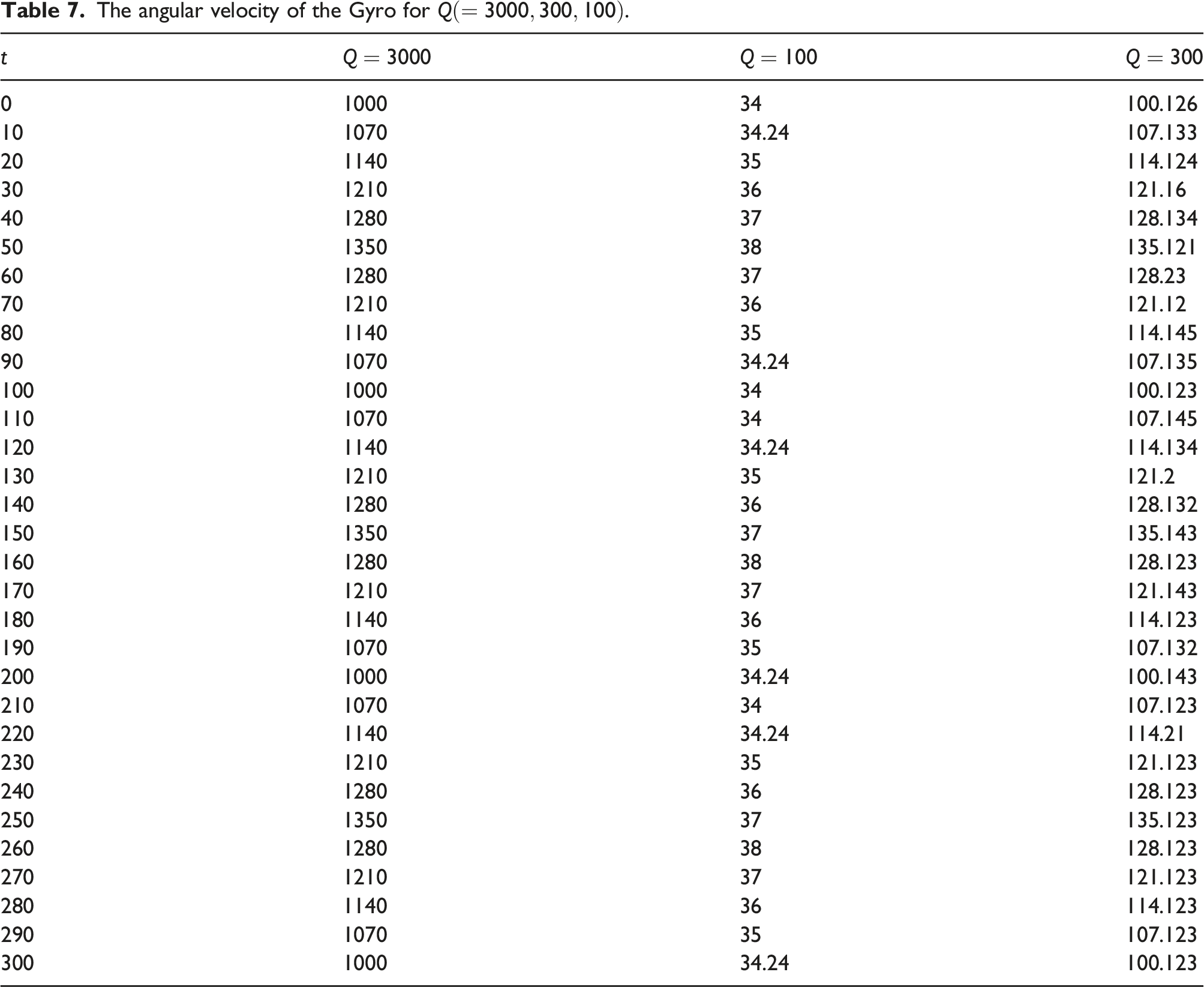
This section illustrates a qualitative analysis of the obtained results, explanations, and many diagrams. The analytical solutions of system (33) are drawn by computer programs for obtaining the geometric behavior of our solutions, which are represented when the point charge Gausses and given by Tables 1–3. From the other side, system (23) can be solved numerically using the fourth-order Runge-Kutta of the method through other programs to obtain the numerical solutions for this system, taking into consideration the same values of initial conditions and point charge. The results are given in Tables 4–6. From these tables, we note that, when the point charge increases from to Gausses, the amplitude of the solutions increase and vice versa. In the other direction, when the point charge decreases from to Gausses, the amplitude of the solution decreases while the amplitude of the solution increases and vice versa. The angular velocity of the gyrostat increases when the point charge increases and vice versa, see Table 7.
The analytical solutions and when .
0
1.88116E-10
10
0
0
10
1.52189E-10
8.09017
−1.10572E-10
−5.87785
20
5.81312E-11
3.09017
−1.78909E-10
−9.51057
30
−5.81312E-11
−3.09017
−1.78909E-10
−9.51056
40
−1.5219E-10
−8.09017
−1.10572E-10
−5.87785
50
−1.88117E-10
−10
−2.84048E-17
−1.50996E-06
60
−1.52189E-10
−8.09017
1.10572E-10
5.87785
70
−5.81312E-11
−3.09017
1.78909E-10
9.51056
80
5.81312E-11
3.09017
1.78909E-10
9.51056
90
1.5219E-10
8.09017
1.10572E-10
5.87785
100
1.88117E-10
10
5.68096E-17
3.01992E-06
110
1.52189E-10
8.09017
−1.10572E-10
−5.87785
120
5.81312E-11
3.09017
−1.78909E-10
−9.51057
130
−5.81313E-11
−3.09017
−1.78909E-10
−9.51056
140
−1.52189E-10
−8.09017
−1.10572E-10
−5.87785
150
−1.88117E-10
−10
4.48654E-18
2.38498E-07
160
−1.52189E-10
−8.09017
1.10572E-10
5.87785
170
−5.81311E-11
−3.09016
1.78909E-10
9.51057
180
5.81314E-11
3.09018
1.78909E-10
9.51056
190
1.5219E-10
8.09017
1.10572E-10
5.87785
200
1.88117E-10
10
1.13619E-16
6.03983E-06
210
1.5219E-10
8.09017
−1.10572E-10
−5.87785
220
5.81312E-11
3.09017
−1.78909E-10
−9.51056
230
−5.81312E-11
−3.09017
−1.78909E-10
−9.51056
240
−1.5219E-10
−8.09017
−1.10572E-10
−5.87785
250
−1.88117E-10
−10
1.27079E-16
6.75532E-06
260
−1.52189E-10
−8.09016
1.10572E-10
5.87786
270
−5.81313E-11
−3.09018
1.78909E-10
9.51056
280
5.81311E-11
3.09017
1.78909E-10
9.51057
290
1.52189E-10
8.09017
1.10572E-10
5.87785
300
1.88117E-10
10
−8.97307E-18
−4.76995E-07
The analytical solutions and when .
0
704.67
637.1147
0
0
10
701.93
515.4367
−75.63186
−448.67
20
697.48
196.8793
−46.74305
−593.21
30
697.48
−196.8793
46.74306
−594.21
40
701.93
−515.4367
75.63185
−448.66
50
704.68
−637.1148
−13.9044E-06
0.000055698
60
701.93
−515.4366
−75.63186
448.67
70
697.48
−196.8794
−46.74307
593.21
80
697.48
196.8794
46.74308
594.21
90
701.93
515.4366
75.63186
448.67
100
704.68
637.1148
−27.8089E-06
−0.00011139
110
701.93
515.4367
−75.63186
−448.66
120
697.48
196.8792
−46.74303
−593.22
130
697.48
−196.8796
46.74312
−594.21
140
701.93
−515.4366
75.63187
−448.68
150
704.68
−637.1148
−37.9326E-07
0.000015195
160
701.93
−515.4366
−75.63187
448.68
170
697.48
−196.8796
−46.74311
593.21
180
697.48
196.8792
46.74304
594.22
190
701.93
515.4367
75.63185
448.66
200
704.68
637.1148
−55.6177E-06
−0.00022279
210
701.93
515.4368
−75.63184
−448.65
220
697.48
196.8793
−46.74307
−593.21
230
697.48
−196.8794
46.74308
−594.21
240
701.93
−515.4368
75.63184
−448.64
250
704.68
−637.1148
44.2379E-06
−0.00017720
260
701.93
−515.4363
−75.6319
448.71
270
697.48
−196.8797
−46.74315
593.2
280
697.48
196.879
46.743
594.22
290
701.93
515.4366
75.63187
448.68
300
704.68
637.1148
−75.8652E-07
−0.000030390
The analytical solutions and when .
0
11.54701
3.179794
6.6701
2.1311
10
13.56894
3.025179
6.2302
−9.7902
20
15.44319
2.576409
5.7301
−18.6358
30
17.14934
1.877127
5.1601
−25.6653
40
18.66884
9.95E-01
4.5402
−30.1992
50
19.98513
1.68E-02
3.8601
−31.7964
60
21.08389
−9.63E-01
3.1501
−30.302
70
21.95317
−1.84992
2.4002
−25.8611
80
22.58349
−2.55652
1.6201
−18.9057
90
22.968
−3.01453
8.3002
−10.112
100
23.10252
−3.17941
2.8103
−3.3502
110
22.98558
−3.03514
−7.7402
9.4701
120
22.61844
−2.59574
−1.5701
18.362
130
22.00512
−1.90396
−2.3501
25.46437
140
21.15229
−1.02704
−3.1002
30.0906
150
20.06922
−5.03E-02
−3.8101
31.79089
160
18.76771
9.31E-01
−4.4901
30.39994
170
17.26192
1.822433
−5.1202
26.05304
180
15.56824
2.536283
−5.6901
19.17292
190
13.70511
3.003507
−6.2001
10.42858
200
11.69281
3.178677
−6.6402
6.7002
210
9.5501
3.044762
−7.0101
−9.1501
220
7.3101
2.61479
−7.3101
−18.0862
230
4.9901
1.930572
−7.5202
−25.2606
240
2.6101
1.058642
−7.6501
−29.9787
250
2.0302
8.38E-02
−7.7001
−31.7818
260
2.2001
−8.99E-01
−7.6702
−30.4944
270
4.5901
−1.79474
−7.5501
−26.242
280
6.9201
−2.51577
−7.3501
−19.438
290
9.1801
−2.99214
−7.0702
−10.744
300
−11.3402
−3.17759
−6.7101
−1.0101
The numerical solutions and when .
0
1.88116E-10
10
0
0
10
1.52188E-10
8.09017
−1.10571E-10
−5.87784
20
5.81311E-11
3.09016
−1.78909E-10
−9.51057
30
−5.81311E-11
−3.09017
−1.78908E-10
−9.51056
40
−1.5218E-10
−8.09017
−1.10571E-10
−5.87784
50
−1.88116E-10
−10
−2.84048E-17
−1.50996E-06
60
−1.52188E-10
−8.09016
1.10571E-10
5.87784
70
−5.81311E-11
−3.09016
1.78909E-10
9.51056
80
5.81311E-11
3.090176
1.78909E-10
9.51056
90
1.5218E-10
8.09016
1.10571E-10
5.87784
100
1.88116E-10
10
5.68096E-17
3.01992E-06
110
1.52188E-10
8.09017
−1.10571E-10
−5.87784
120
5.81311E-11
3.09016
−1.78909E-10
−9.51057
130
−5.81312E-11
−3.09017
−1.78909E-10
−9.51056
140
−1.52188E-10
−8.09016
−1.10571E-10
−5.87784
150
−1.88116E-10
−10
4.48654E-18
2.38498E-07
160
−1.52188E-10
−8.09017
1.10571E-10
5.87784
170
−5.81310E-11
−3.09016
1.78908E-10
9.51057
180
5.81313E-11
3.09018
1.78908E-10
9.51056
190
1.5218E-10
8.09017
1.10572E-10
5.87784
200
1.88116E-10
10
1.13618E-16
6.03983E-06
210
1.5218E-10
8.09016
−1.10571E-10
−5.87784
220
5.81311E-11
3.09016
−1.78909E-10
−9.51056
230
−5.81311E-11
−3.09016
−1.78909E-10
−9.51056
240
−1.5218E-10
−8.09016
−1.10571E-10
−5.87784
250
−1.88116E-10
−10
1.27079E-16
6.75532E-06
260
−1.52188E-10
−8.09015
1.10572E-10
5.87786
270
−5.81312E-11
−3.09017
1.78908E-10
9.51056
280
5.81310E-11
3.09016
1.78909E-10
9.51057
290
1.52188E-10
8.09016
1.10571E-10
5.87784
300
1.88116E-10
10
−8.97307E-18
−4.76995E-07
The numerical solutions and when .
0
704.67
637.1147
0
0
10
701.93
515.4367
−75.63185
−448.66
20
697.48
196.8793
−46.74305
−593.21
30
697.48
−196.8793
46.74306
−594.21
40
701.93
−515.4367
75.63184
−448.66
50
704.67
−637.1147
−13.9044E-06
0.000055698
60
701.93
−515.4366
−75.63185
448.66
70
697.48
−196.8794
−46.74307
593.21
80
697.48
196.8794
46.74308
594.21
90
701.93
515.4366
75.63185
448.66
100
704.67
637.1147
−27.8089E-06
−0.00011139
110
701.93
515.4367
−75.63186
−448.67
120
697.48
196.8792
−46.74305
−593.22
130
697.48
−196.8796
46.74312
−594.21
140
701.93
−515.4366
75.63187
−448.67
150
704.67
−637.1147
−37.9326E-07
0.000015195
160
701.93
−515.4366
−75.63186
448.68
170
697.48
−196.8796
−46.74311
593.21
180
697.48
196.8792
46.74304
594.22
190
701.93
515.4367
75.63185
448.67
200
704.67
637.1147
−55.6177E-06
−0.00022279
210
701.93
515.4368
−75.63184
−448.65
220
697.48
196.8793
−46.74307
−593.21
230
697.48
−196.8794
46.74308
−594.21
240
701.93
−515.4368
75.63184
−448.63
250
704.67
−637.1147
44.2379E-06
−0.00017720
260
701.93
−515.4363
−75.6319
448.71
270
697.48
−196.8797
−46.74315
593.2
280
697.48
196.879
46.743
594.21
290
701.93
515.4366
75.63186
448.68
300
704.67
637.1147
−75.8652E-07
−0.000030380
The numerical solutions and when .
t
a
b
0
11.54701
3.179794
6.6701
2.1311
10
13.56895
3.025179
6.2301
−9.7901
20
15.44319
2.576409
5.7301
−18.6358
30
17.14935
1.877127
5.1601
−25.6653
40
18.66884
9.95E-01
4.5401
−30.1992
50
19.98513
1.68E-02
3.8601
−31.7965
60
21.08389
−9.63E-01
3.1501
−30.302
70
21.95317
−1.84992
2.4001
−25.8611
80
22.58349
−2.55652
1.6201
−18.9057
90
22.968
−3.01453
8.3002
−10.112
100
23.10252
−3.17941
2.8103
−3.3502
110
22.98558
−3.03514
−7.7402
9.4701
120
22.61844
−2.59575
−1.5701
18.362
130
22.00512
−1.90396
−2.3501
25.46437
140
21.15229
−1.02705
−3.1001
30.0906
150
20.06922
−5.03E-02
−3.8101
31.79089
160
18.76771
9.31E-01
−4.4901
30.39994
170
17.26192
1.822433
−5.1201
26.05304
180
15.56824
2.536283
−5.6901
19.17292
190
13.70511
3.003507
−6.2001
10.42858
200
11.69281
3.178677
−6.6401
6.7002
210
9.5501
3.044762
−7.0101
−9.1501
220
7.3101
2.61479
−7.3101
−18.0862
230
4.9901
1.930572
−7.5201
−25.2606
240
2.6101
1.058642
−7.6501
−29.9787
250
2.0302
8.38E-02
−7.7001
−31.7818
260
2.2001
−8.99E-01
−7.6701
−30.4945
270
4.5901
−1.79475
−7.5501
−26.242
280
6.9201
−2.51577
−7.3501
−19.438
290
9.1801
−2.99215
−7.0701
−10.744
300
−11.3402
−3.17759
−6.7101
−1.0101
The angular velocity of the Gyro for .
0
1000
34
100.126
10
1070
34.24
107.133
20
1140
35
114.124
30
1210
36
121.16
40
1280
37
128.134
50
1350
38
135.121
60
1280
37
128.23
70
1210
36
121.12
80
1140
35
114.145
90
1070
34.24
107.135
100
1000
34
100.123
110
1070
34
107.145
120
1140
34.24
114.134
130
1210
35
121.2
140
1280
36
128.132
150
1350
37
135.143
160
1280
38
128.123
170
1210
37
121.143
180
1140
36
114.123
190
1070
35
107.132
200
1000
34.24
100.143
210
1070
34
107.123
220
1140
34.24
114.21
230
1210
35
121.123
240
1280
36
128.123
250
1350
37
135.123
260
1280
38
128.123
270
1210
37
121.123
280
1140
36
114.123
290
1070
35
107.123
300
1000
34.24
100.123
The considered motion in this case is described by Euler’s angles named: the nutation angle , the precession angle , and the pure rotation one . We deduce from (32) and (31) that the angle of nutation is still constant for all over the motion, whenever the angle of precession contains the time .
For the approximation of order zero in , we can deduce that
Therefore, the permanent rotation case in the equatorial plane is slow for the gyro motion about the symmetry axis is attained.
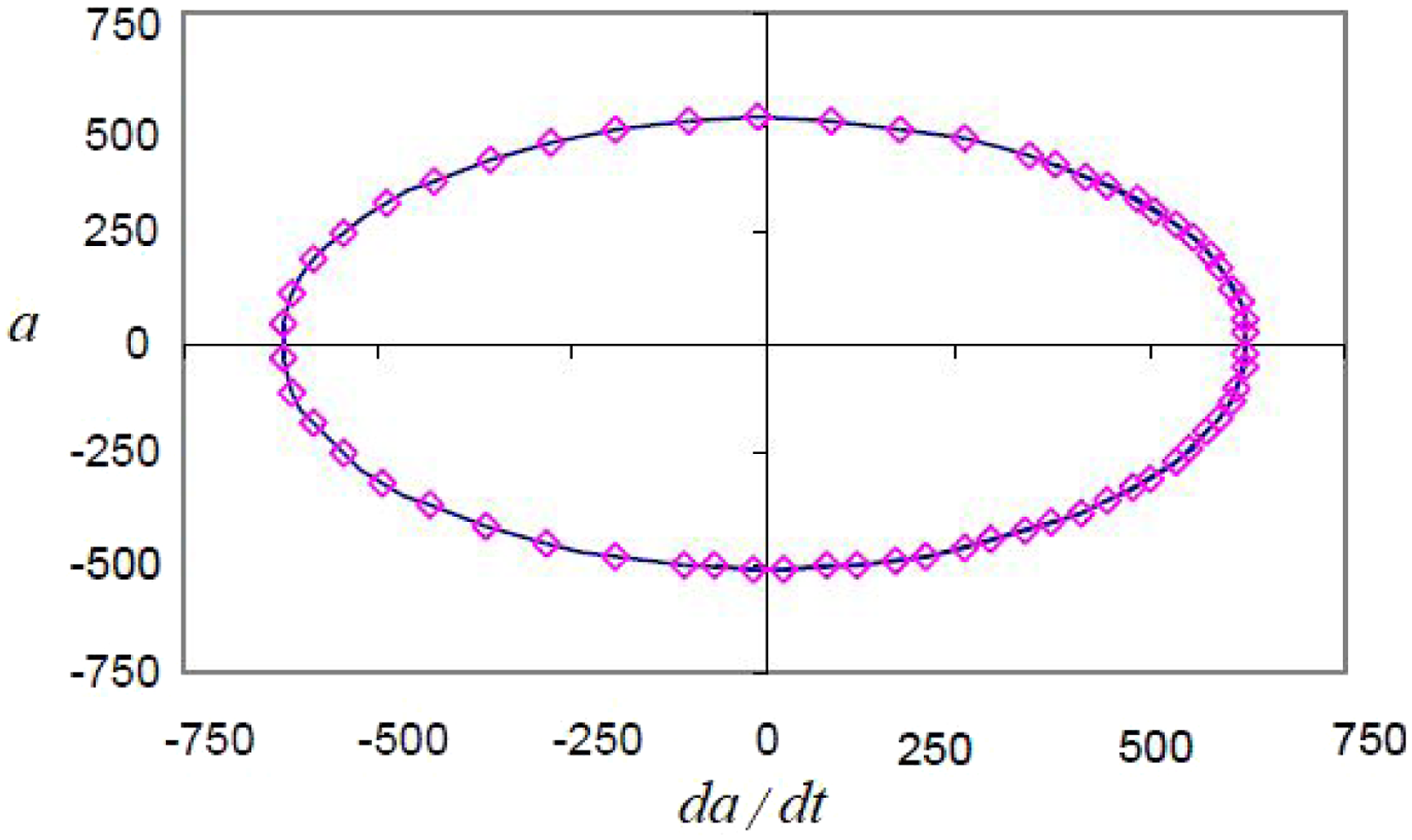
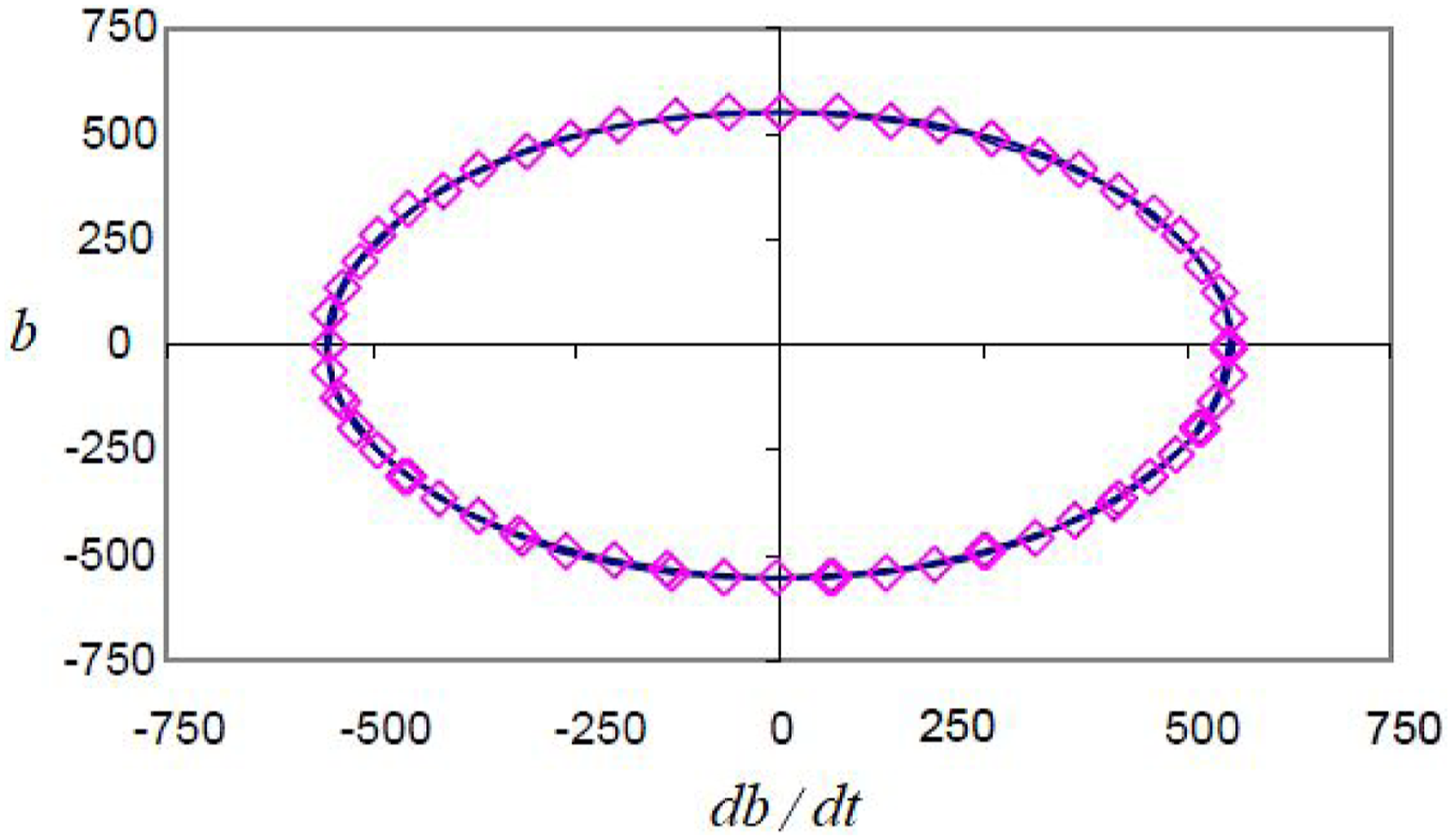
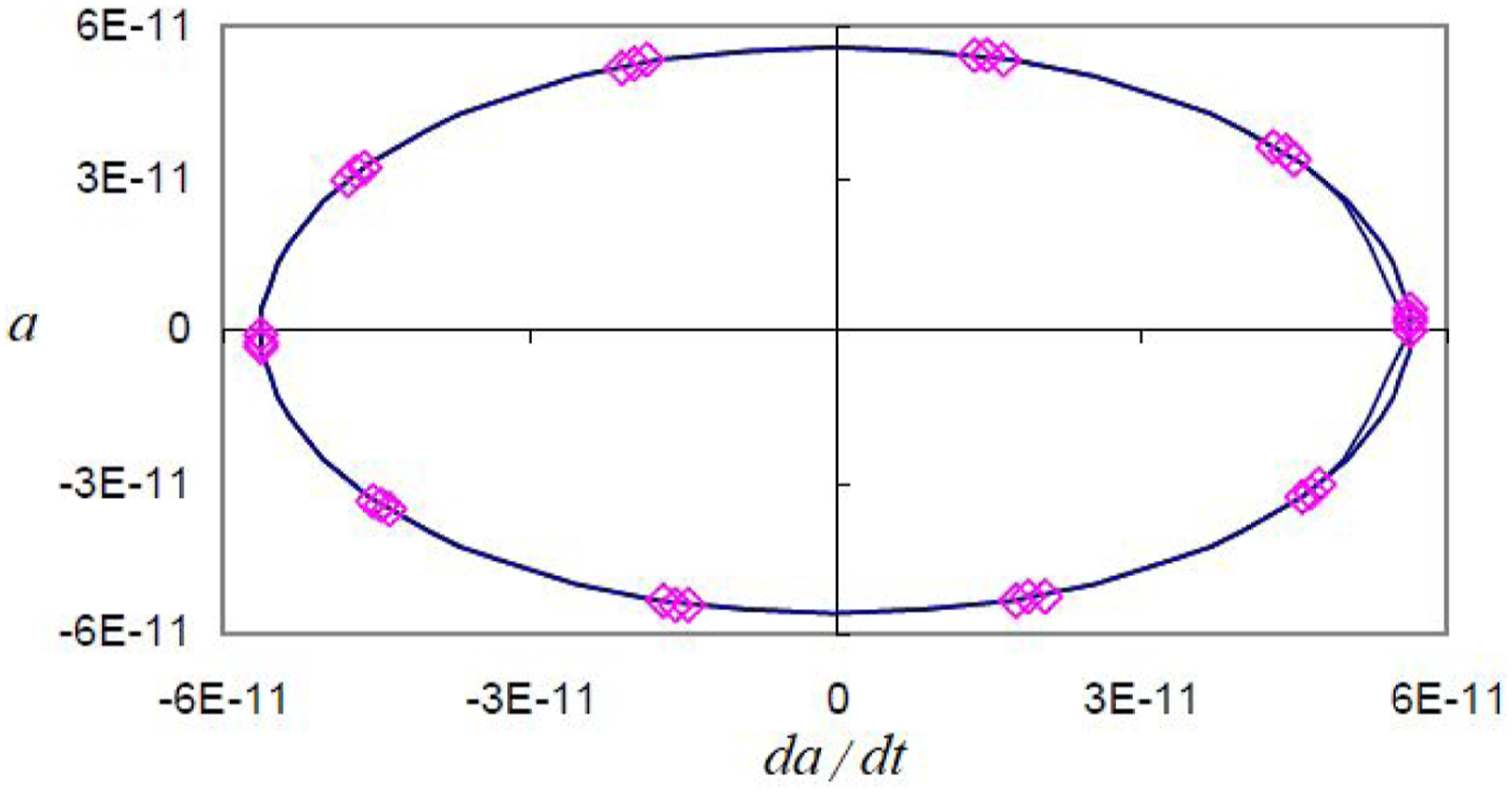
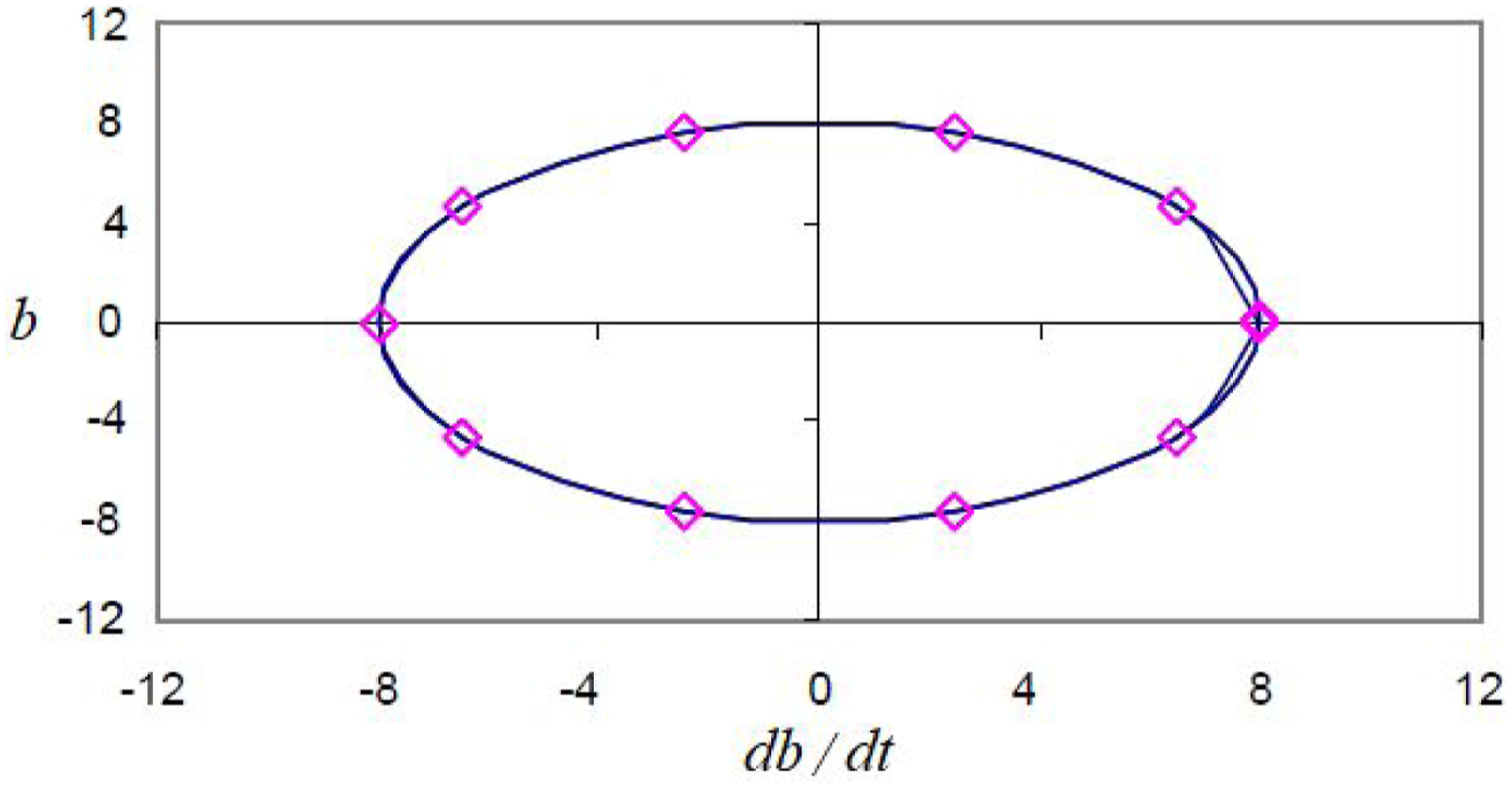
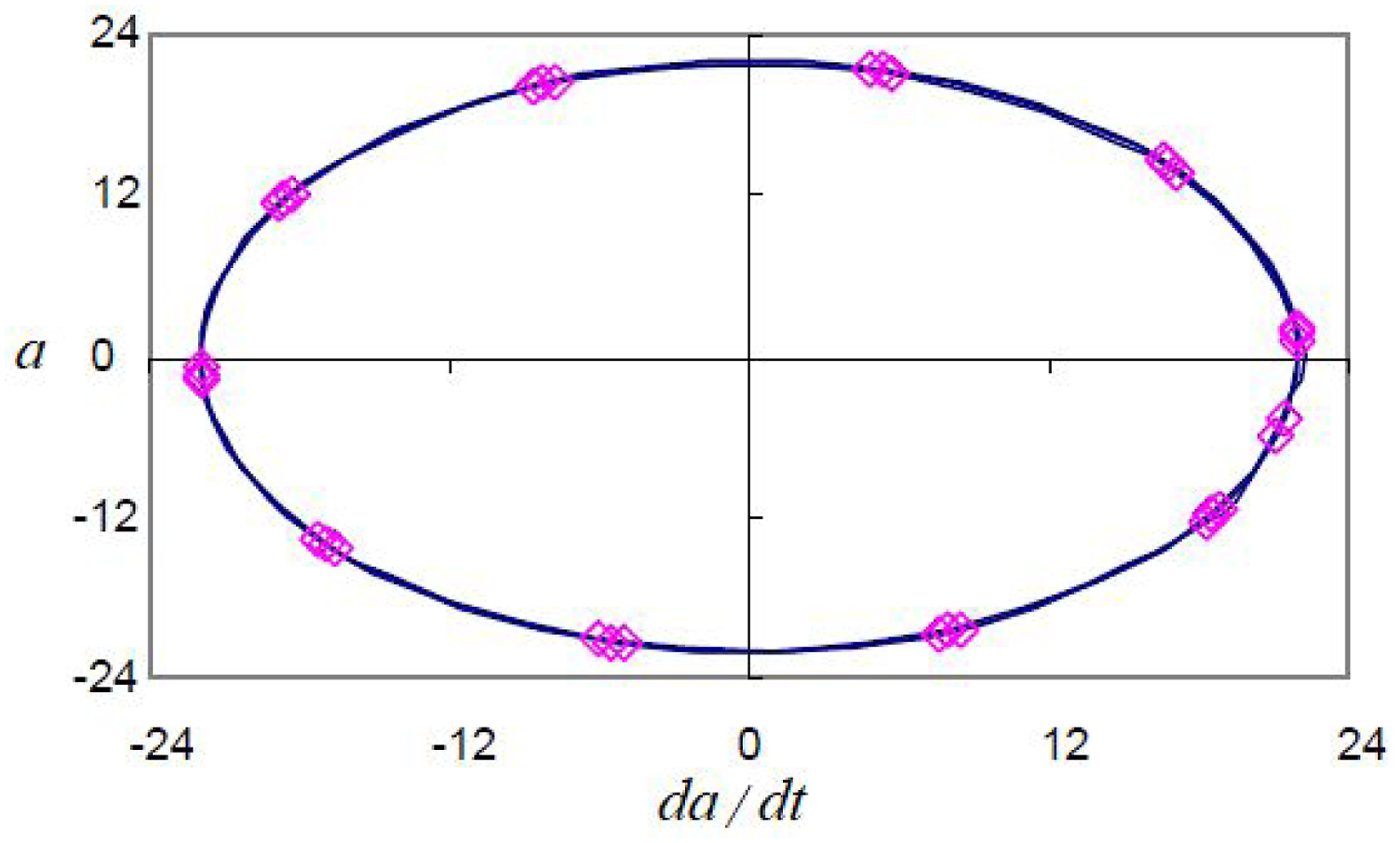
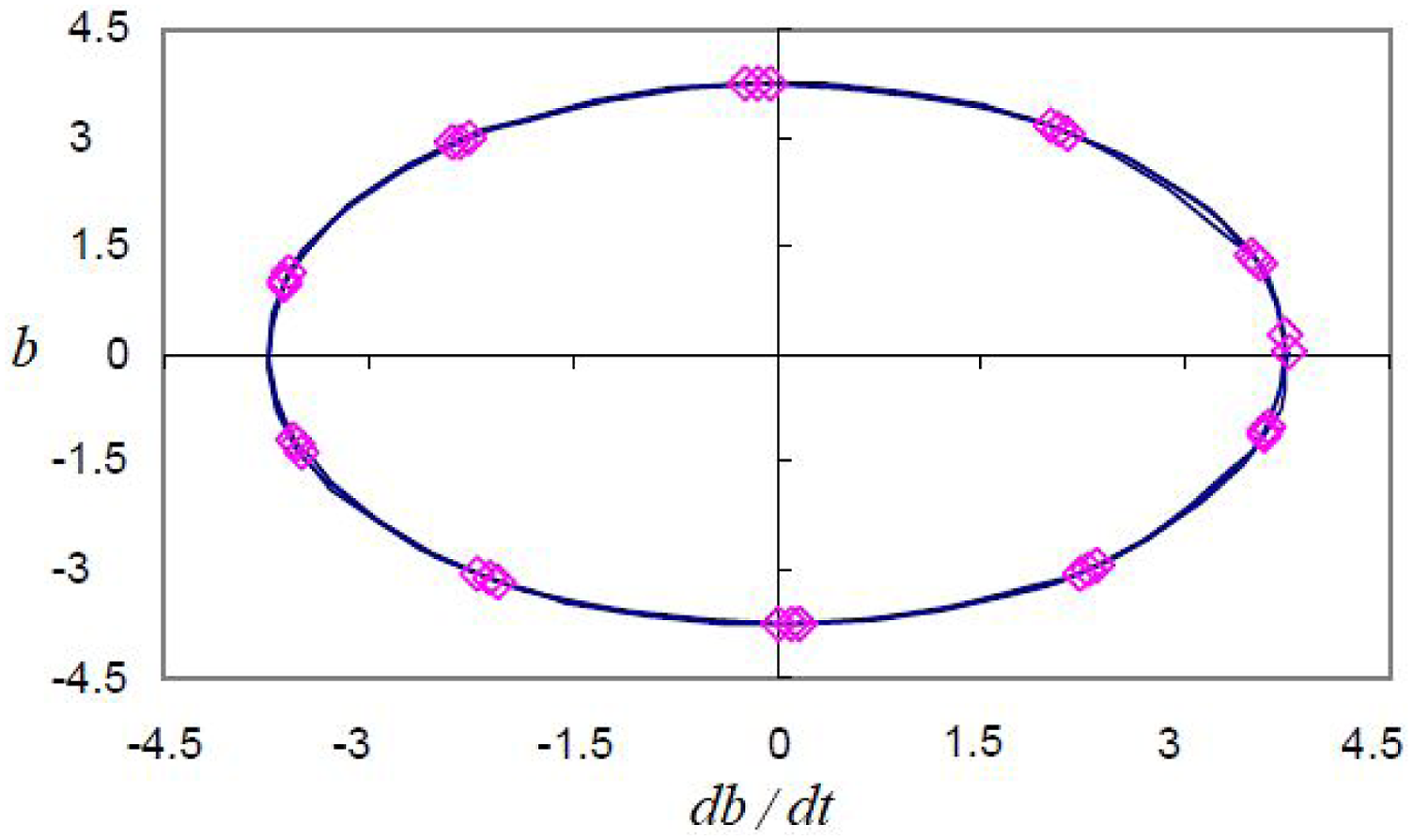
The study of the stability of the analytical and numerical solutions (a) and (b) for the point charge Gausses is considered for both the analytical and numerical solutions and given through the phase diagrams in Figures 2–7, in which the blue and red curves represent the analytical and numerical results, respectively. From these diagrams, we show that the analytical and numerical solutions are stable for different point charge values and are in full agreement together. That is, the numerical solutions are analogous to the analytical ones for the different values of the point charge . The motion permutation is slow because the existence of the stiffening force for a long-time . We also get a smaller value of the period’s argument.
The stability diagram for the solution and when .
The stability diagram for the solution and when .
The stability diagram for the solution and when .
The stability diagram for the solution and when .
The stability diagram for the solution and when .
The stability diagram for the solution and when .
Conclusion
A constrained vibrating motion of a coupled gyrostat with a spring has been examined. Along with the action of Newtonian and electromagnetic fields, the gyrostat has also been affected by the gyrostatic coupling vector. The gyrostat has been thought to rotate slowly around either the minor or major primary axis of the inertia ellipsoid. The large parameter technique has been utilized to derive periodic solutions of the gyrostatic EOM. A geometric depiction using Euler’s angles has been provided to assess and analyze the gyrostatic motion at any given time. Throughout computer programs, analysis of the acquired solutions is considered in terms of selected numerical data. To produce numerical solutions that demonstrate the reliability of the analytically computed periodic solutions, characterized parametric data are assumed by one of the numerical methods. Phase diagrams have also been produced for the obtained solutions aiming to describe their periodicity and stability processes in a manner like.30,31 The considered large parameter technique gives us the chance to study the problem under new conditions which saves the used energy to move the body initially. It also enables us to investigate various problems in new areas of the gyrostatic motion and solve several complicated cases that never solved by the previous techniques.
Footnotes
Acknowledgments
The authors would like to thank the Deanship of Scientific Research at Umm Al-Qura University for supporting this work by Grant Code: (22UQU4240002DSR12).
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This work was supported by the Deanship of Scientific Research at Umm Al-Qura University for supporting this work by Grant Code: (22UQU4240002DSR12).
ORCID iDs
Abdelaziz I Ismail
Tarek S Amer
Wael S Amer
References
1.
ChernouskoFLAkulenkoLDLeshchenkoD. Evolution of motions of a rigid body about its center of mass. Cham, Switzerland: Springer, 2017.
2.
LeimanisE. The general problem of the motion of coupled rigid bodies about a fixed point. New York, NY: Springer, 1965.
3.
YehiaHM. New integrable cases in the dynamics of rigid bodies. Mech Res Commun1986; 13: 169–172.
4.
YehiaHM. New generalizations of the integrable problems in rigid body dynamics. J Phys A: Math Gen1997; 30: 7269–7275.
5.
YehiaHMElmandouhAA. New conditional integrable cases of motion of a rigid body with Kovalevskaya’s configuration. J Phys A: Math Theor2011; 44: 012001.
6.
AmerTSAmerWS. Substantial condition for the fourth first integral of the rigid body problem. Math Mech Solids2018; 23(8): 1237–1246.
7.
BrunoADEdneralVF. Calculation of normal forms of the Euler–Poisson equations. In: GerdtVPKoepfWMayrEW, et al. (eds). Computer Algebra in Scientific Computing. CASC (2012). Lecture Notes in Computer Science, vol 7442. Berlin, Heidelberg: Springer, 2012.
8.
GorrGV. A complex approach to the interpretation of the motion of a solid with a fixed point. Mech Solids2021; 56: 932–946.
9.
IsmailAbdelaziz IAmerTS. The fast spinning motion of a rigid body in the presence of a gyrostatic momentum. Acta Mech2002; 154: 31–46.
10.
AmerTS. Motion of a rigid body analogous to the case of Euler and Poinsot. Analysis2004; 24: 305–315.
11.
AmerTSAmerWS. On the motion of a gyro close to Kovalevskaya’s case. J Comput Theor Nanosci2017; 14: 1009–1015.
12.
AmerTSAmerWS. The rotational motion of a symmetric rigid body similar to Kovalevskaya’s case. Iran J Sci Technol Trans Sci2018; 42(3): 1427–1438.
13.
AmerTSAmerWSEl-KaflyH. Studying the influence of external moment and force on a disc’s motion. Sci Rep2022; 12: 16942.
14.
VenkateshanSPSwaminathanP. Computational methods in engineering. Elsevier Inc., 2014.
15.
ZhaoDAngJiLCZ. Numerical and experimental investigation of the acoustic damping effect of single-layer perforated liners with joint bias-grazing flow. J Sound Vib2015; 342(28): 152–167.
16.
MaDLiuC. Dynamics of a spinning disk. J Appl Mech2016; 83(6): 061003.
17.
IsmailAI. The periodic rotary motions of a rigid body in a new domain of angular velocity. J Egypt Math Soc2021; 29: 2.
18.
IsmailAI. Applying the large parameter technique for solving a slow rotary motion of a disc about a fixed point. Int J Aerosp Eng2020; 2020: 1–7.
19.
IsmailAIAmerTarek S. A necessary and sufficient condition for solving a rigid body problem. Technische Mechanik2011; 31(1): 50–57.
20.
AmerTS. On the motion of a gyrostat similar to Lagrange’s gyroscope under the influence of a gyrostatic moment vector. Nonlinear Dyn2008; 54: 249–262.
21.
AmerTSAbadyIM. On the application of KBM method for the 3-D motion of asymmetric rigid body. Nonlinear Dyn2017; 89: 1591–1609.
22.
IsmailAI. Motion of a rigid body in a newtonian field of force exerted by three attracting centers. J Aerosp Eng2011; 24(3): 318–328.
23.
GalalAA. Free rotation of a rigid mass carrying a rotor with an internal torque. J Vib Eng Technol2022. DOI: 10.1007/s42417-022-00772-w
24.
RezaNJ. Perturbation methods in science and engineering. Springer Nature Switzerland AG, 2021.
25.
HolmesMH. Introduction to perturbation methods. New York, NY: Springer, 2013.
26.
LeshchenkoDDSallamSN. Perturbed rotation of a rigid body relative to fixed point. Mech. Solids1990; 25(5): 16–23.
27.
AmerTS. The rotational motion of the electromagnetic symmetric rigid body. Appl Math Inf Sci2016; 10(4): 1453–1464.
28.
AmerTSAbadyIM. On the motion of a gyro in the presence of a Newtonian force field and applied moments. Math Mech Solids2018; 23(9): 1263–1273.
29.
GalalAAAmerTSEl-KaflyH, et al.The asymptotic solutions of the governing system of a charged symmetric body under the influence of external torques. Results Phys2020; 18: 103160.
30.
ZhaoDJiCTeoC, et al.Performance of small-scale bladeless electromagnetic energy harvesters driven by water or air. Energy2014; 74(1): 99–108.
31.
HanNZhaoDSchluterJU, et al.Performance evaluation of 3D printed miniature electromagnetic energy harvesters driven by air flow. Appl Energy2016; 178: 672–680.