
Abstract
This paper’s main investigation is based on approaching a new solution for the nonlinear Euler’s equations that govern the motion of a rigid body (RB), which is close to Lagrange’s case. The RB is rotating under the influence of two external torques; the gyrostatic torque (GT) and the RB’s constant fixed torques (RBCFTs). The governing equations of motion (EOMs) have been derived and scaled to be decoupled and solved in a complex form. The novel analytical solutions for the angular velocities have been approached and visualized with the help of a mathematical program (Wolfram Mathematica 13.2). The effect of the GT and the RBCFT on these obtained solutions has been presented. In addition, the phase portraits which are a way to visualize the stability and periodicity of the system’s angular velocities have also been explored. These outcomes could help illustrate how GT plays a role in controlling the stability and dynamics of rotating RBs. The importance of this study can significantly affect the stability and control of various mechanical and aerospace systems. Its applications include the design of gyroscopes, spacecraft attitude control, and navigation systems where precise motion control is critical. Understanding this phenomenon helps engineers create more efficient, stable, and reliable systems in fields such as robotics, aviation, and space exploration.
Keywords
Introduction
Researching the three-dimensional rotational motion of RBs is essential in many domains, from mathematics and mechanics to electronics and aeronautics. Understanding the complex interactions and behaviors of RBs in three dimensions is essential to developing efficient management plans, predicting structural stability, and optimizing performance for a wide range of applications. Scientists have performed a huge amount of research on this topic, demonstrating the dedication of numerous researchers to this field.1–27 In Ref. 1, the author presented all the fundamentals of the problem. In such a context, the problem governing the EOMs of the RB under the impact of external torque concerning Euler’s equations is provided, which consists of three nonlinear differential equations (DEs). In Ref. 2, the author demonstrates that a heavily charged unsymmetrical RB moving around a fixed point with a rotor and subjected to three uniform fields was capable of carrying out a typical precession about a non-vertical axis, similar to what Grioli (1947) stated for the scenario of one field. In Ref. 3, the authors examined the disturbed rotating movements of the RB subjected to a torque that varies gradually over time, in a situation that is similar to Lagrange’s scenario. An estimated system for the EOMs is generated, and the requirements are stated for the feasibility of the averaged EOMs with regard to the nutation angle. For an approach that is the same as Ref. 3 and Ref. 4 considers the real mechanical form of the perturbations, which correspond to the movement of the RB in a medium with linear disintegration. In Ref. 5, the authors obtained the approximate analytical solution for both angular velocities and Euler’s angles for a charge RB’s model under the impact of both GT and RBCFTs considering small angular deviations of the spin axis with respect to a fixed direction in space. New analytical solutions are presented in Ref. 6 when the authors take into account the impact of RBCFT which acts along the minor and middle axes of asymmetric RB. Numerical solutions for the case of a RBCFT on the major axis are obtained. In Ref. 7, the dynamics of a near-symmetric RB exposed to RBCFTs are approximated analytically and solved. Fresnel integrals are used to solve Euler’s EOMs. A tentative solution for the Euler angles has been achieved using sine and cosine integrals along with Fresnel integrals.
In Ref. 8, the focus is on the stability of the RB’s orientation under an irregular perturbing torque. This regulating torque includes two distinct parts: one that is dissipative and another that is restorative. The Lyapunov function and averaging method are used to determine the criteria for the asymptotic stability of the RB’s rotation. A new approach for solving the Euler–Poisson equations is proposed in Ref. 9, treating the components of the RB’s angular velocity as functions of time only. The analytic solution is derived based on two real-valued coefficients, which are found to satisfy a system of two simultaneous Riccati ordinary DEs. The work in Ref. 10 introduces a novel calculation strategy for the solutions of these equations, based on the method for solving Poisson’s equations that was first developed in Ref. 9 The study in Ref. 11 focuses on a three degrees of freedom (DOF) pendulum model with the RB suspended on an elastic spring. This body was assumed to move with an arbitrary angular velocity within a rotating vertical plane. The governing EOMs are derived using Lagrange’s equations to constitute a nonlinear system of second-order ordinary DEs. In Ref. 12, the motion of the RB about a fixed point in a Newtonian central force field with a GT is examined according to Euler–Poinsot’s case. It is assumed that this body has an initially large angular velocity about either the major or minor principal axis of the inertia ellipsoid. The EOMs and their first integrals have been reduced to a quasi-linear system with 2DOF and a single integral. In Ref. 13, the author proposed an innovative method for determining the orientation of the RB with moving masses. This method examined how moving masses can be used to achieve exponential asymptotic stabilization of the RB’s stable positions. The overall solution to the controlled system’s equations is found and studied in detail. The rotation of the RB around a stationary point under the influence of a Newtonian field is explored in Ref. 14. The EOMs and their first integrals are obtained based on the Euler–Poisson equations. To fully solve these equations, a fourth first integral is generally required, and certain conditions are proposed for specific functions to serve as this fourth integral. In Ref. 15, the problem is often broken down into variables that change both slowly and rapidly. The averaging process for slow parameters of a disturbed motion of the RB in the first approximation is discussed, along with conditions for the potential of averaging EOMs with regard to the phase of nutation angle. The authors examined the motion, near Lagrange scenario, as an illustration of the established approach, accounting for both tiny and unchanging dissipative torques as well as dissipative torques that depend on slow time. Second-order and third-order slope limiters with better shocks sensitivity and precision are introduced in Ref. 16. The current limiters are evaluated on unstructured grids in one and two dimensions and contrasted with the limiters that are currently in use. The numerical result demonstrates that compared to other limiters, the current limiters offer superior accuracy and shock resolving capabilities.
The motion of a charged RB model with a spherical chamber containing an incompressible highly viscous fluid is studied in Ref. 17. This motion is analyzed under the influence of GT, RBCFTs, and torque produced by a resisting force. Euler’s equations are used to formulate the regulating EOMs in a suitable manner. To get close to an appropriate form of the motion’s governing structure, the averaging method is employed. Alongside the use of Taylor’s method to solve the averaged EOMs for this body, certain initial conditions are taken into account to achieve the desired outcomes. In Ref. 18, a model of the Lagrange top-like motion of the RB under slightly time-varying perturbing torque and restoring torque is studied. The authors have established the averaging terms for the EOMs with respect to the Lagrange’s case. The first approximation yields the scaled EOMs, and the asymptotic method allows them to draw qualitative conclusions. These equations are numerically integrated in the case of the RB’s rotational motion in a linear-dissipative medium. A new class of Lagrange’s top rotary motions is investigated, characterized by unsteady perturbing and restoring torques that fluctuate gradually over time, dependent on the small nutation angle. In Ref. 19, the stabilization of a gyrostatic motion in an incompressible ideal fluid is examined. The motion is attributed to neutral forces with non-coincident centers. In Ref. 20, the controlling EOMs for a moving RB through a high-viscosity incompressible fluid are determined. In Ref. 21 the authors analytically estimated the solution to the regulating equations of the RB, taking into account the effects of GT, magnetic and Newtonian fields on its motion. As described in Ref. 22, the motion of the RB near a small spherical cosmic body is accurately modeled by the gravitationally coupled orbit-attitude motion in a J2 gravity field, which offers superior accuracy for spacecraft near small spheroidal bodies. This model naturally integrates the spacecraft’s gravity orbit-attitude coupling. A feedback control using Hamilton’s approach is proposed to maintain the RB’s equilibrium in the J2 gravity field.
In Ref. 23, the rotary movement of a symmetrical gyro similar to Lagrange’s case is investigated. The gyro experiences the influence of GT, perturbing and restoring torque. Initially, it was assumed that the gyro’s angular velocity is high, and the perturbing torques are minor in comparison with the restoring torques. A system of EOMs is derived in both the first and second approximations. The progression of the precession angle is calculated up to the second approximation. In Ref. 24, the authors have studied the motion of a symmetric RB rotating around a fixed point, subjected to various forces such as Newtonian and electromagnetic fields, and external torques. These torques, including perturbing and GT, were aligned with the principal axes of the body. Utilizing the averaging method, the original EOMs are transformed into a more suitable form based on a small parameter. This approach allowed them to derive asymptotic analytical solutions for different cases, accounting for the effects of perturbing and restoring torques.
The author presents the EOMs, which are then expressed in terms of the Hamiltonian function within the framework of the Lie-Poisson system. One possible physical interpretation of the presented scenario in Ref. 25 is a heavily magnetized gyrostat carrying electrical charges within an axially symmetric mixture of the three traditional fields. In Ref. 26, the authors adopt a large parameter technique for estimating periodic solutions of a 2DOF autonomous quasi-linear system with a first integral. This technique is valuable as it allows for practical approximations in scenarios where exact solutions do not exist. Many perturbation techniques based on a small parameter defined by system parameters and initial conditions can be applied to these situations. Thus, they suggest employing a large parameter for solving the specified 2DOF systems and comparing this strategy with established practices in the field. In Ref. 27, the rotary movement of the RB with a GT around an anchor point in the Newtonian field is examined. A quasi-linear autonomous system and a single integral are derived, which have been solved using Poincare’s small parameter method to get their periodic solutions. In Ref. 28, the authors analyze the rotational movement of a symmetric gyrostat whose center of mass is slightly off-center from the axis of symmetry, affected by GT and an electromagnetic field. They derived the EOMs and solved them analytically for the case of irrational frequencies using the aforementioned method of Poincaré. In Ref. 29, the authors present a generalized version of this problem, where the influence of a Newtonian field is taken into account. A simulation involving a charged asymmetric RB, impacted by constant and time-varying torques, GT, and an electromagnetic field, is explored in Ref. 30 and Ref. 31. The authors have developed new approaches to address the angular velocities and Euler angles associated with the problem.
This study focuses on solving the nonlinear dynamic equations of the RB’s model analogous to Lagrange’s case. Two external torques are responsible for the rotation of this body: the first torque is GT, while the second is the RBCFTs. The controlling EOMs have been approached and simplified to allow decoupling and separating the DEs’ system into a solvable one and approach a solution for it. Novel analytic solutions for angular velocities have been achieved and displayed. These solutions have been examined in the context of the influences of GT and RBCFTs. Furthermore, the phase portraits, which illustrate the stability and periodicity of the angular velocities, have also been investigated. These results may contribute to the understanding of how GT regulates the dynamics and stability of rotating RBs. The stability and control of numerous mechanical and aeronautical systems may be greatly impacted by the significance of this work.
The solution of Euler’s equation
The main objective of this section is to present the formulation of the problem along with a novel solution for the angular velocities Sketches the RB’s dynamical model.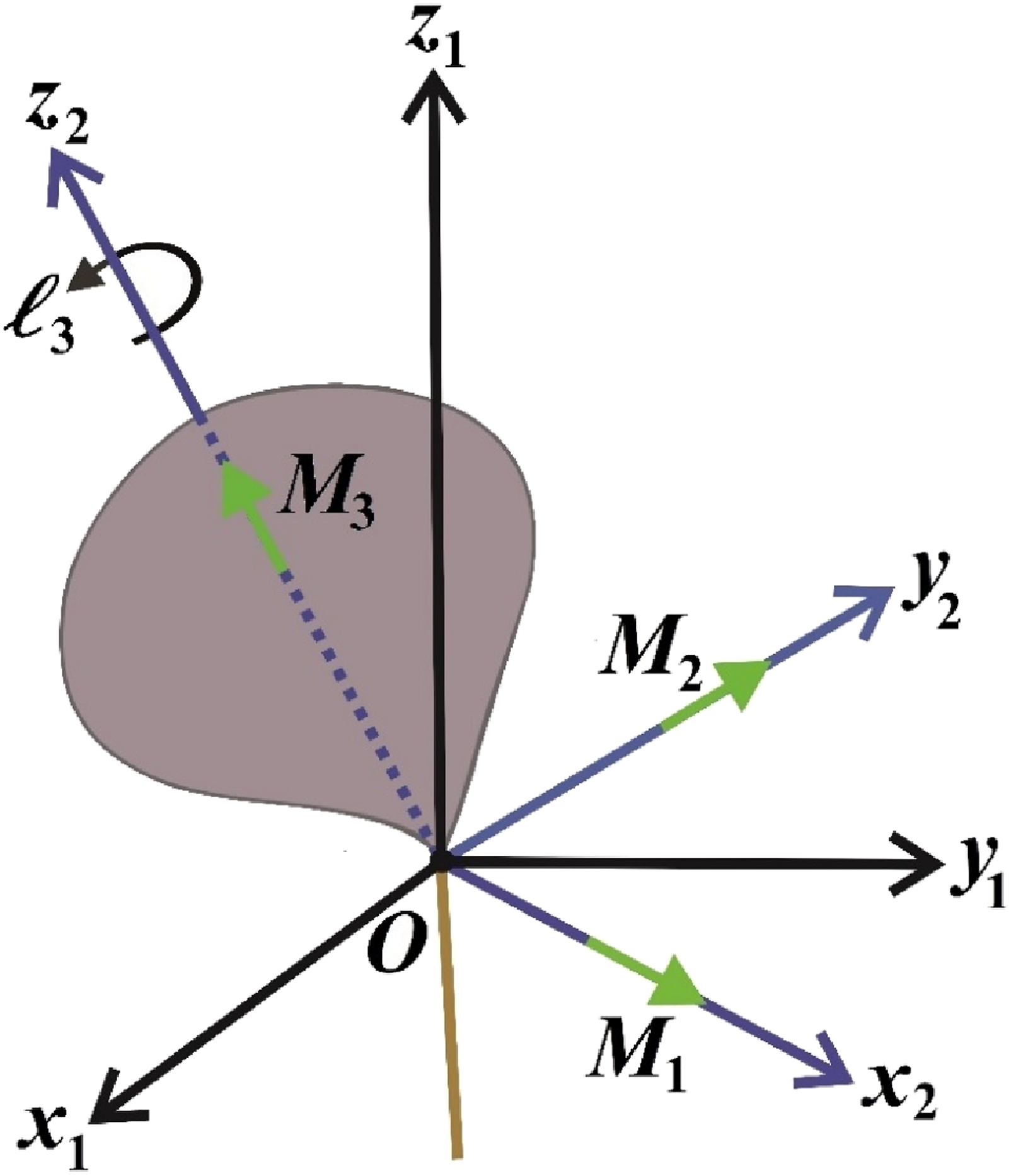
The flowchart of the solution process for getting the solution of Euler’s equation in the studied problem is given in Figure 2. Shows the flowchart of the solution process.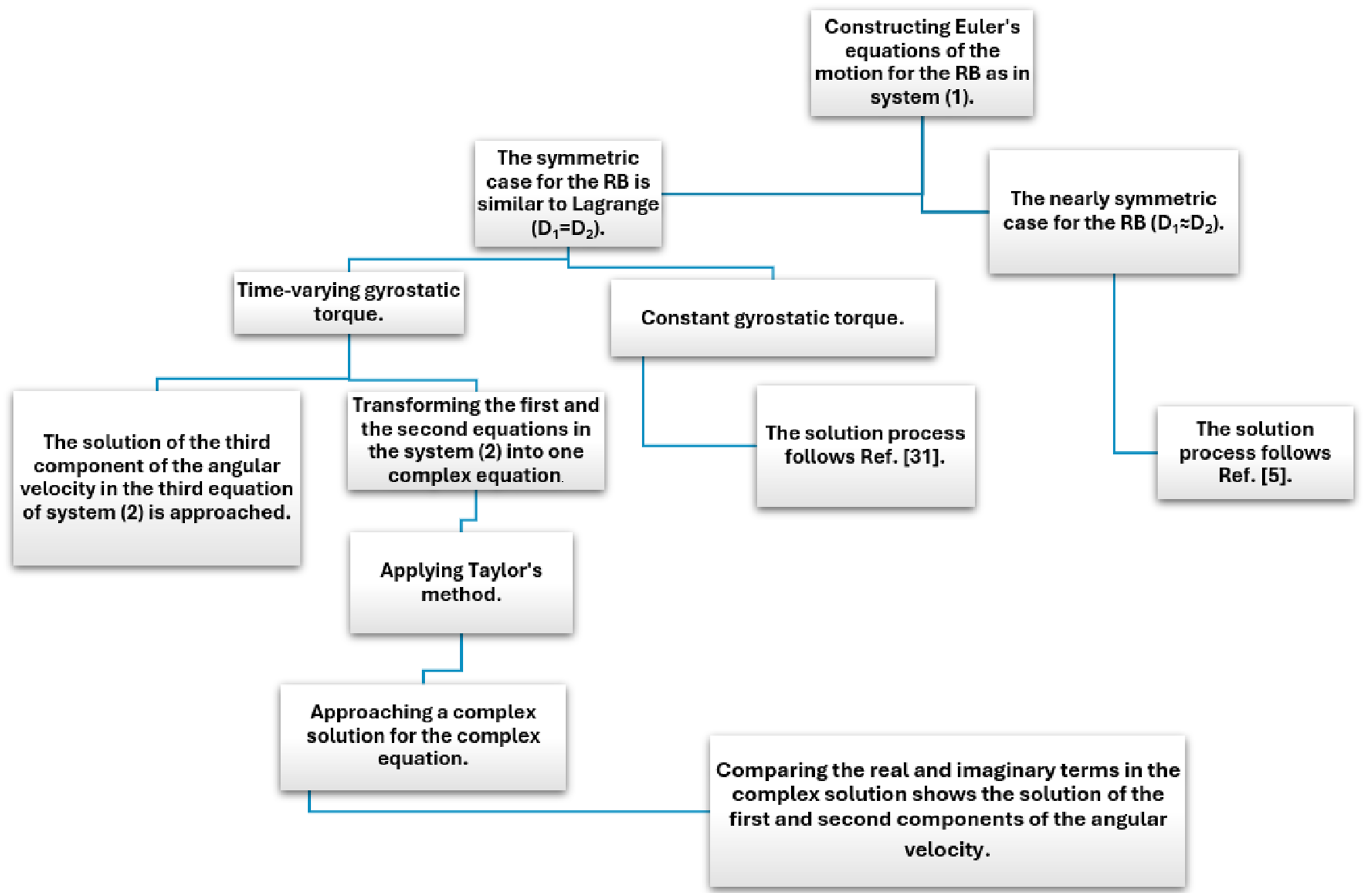
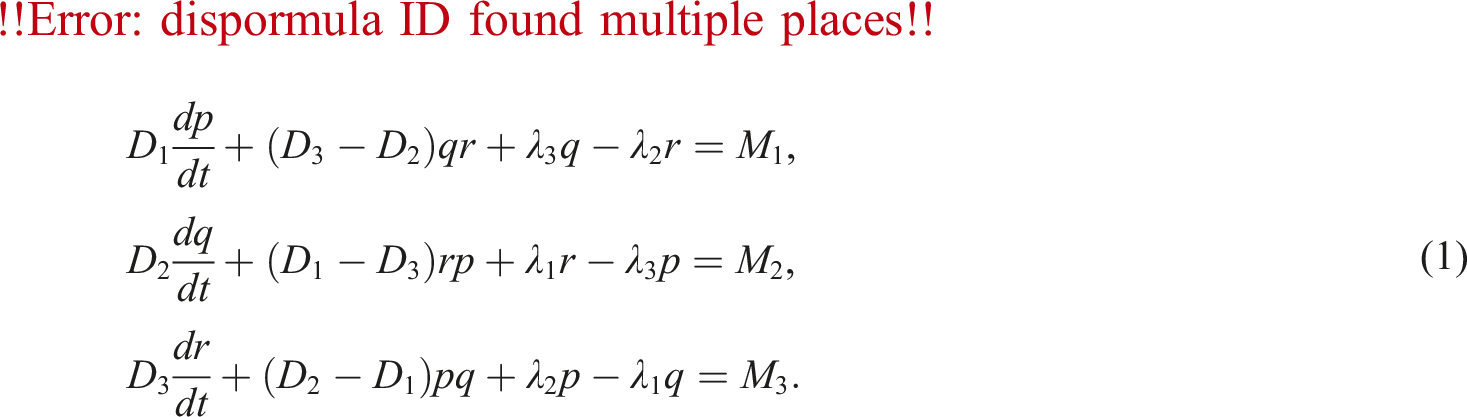
Hence, the RB’s governing EOMs are1,5,31
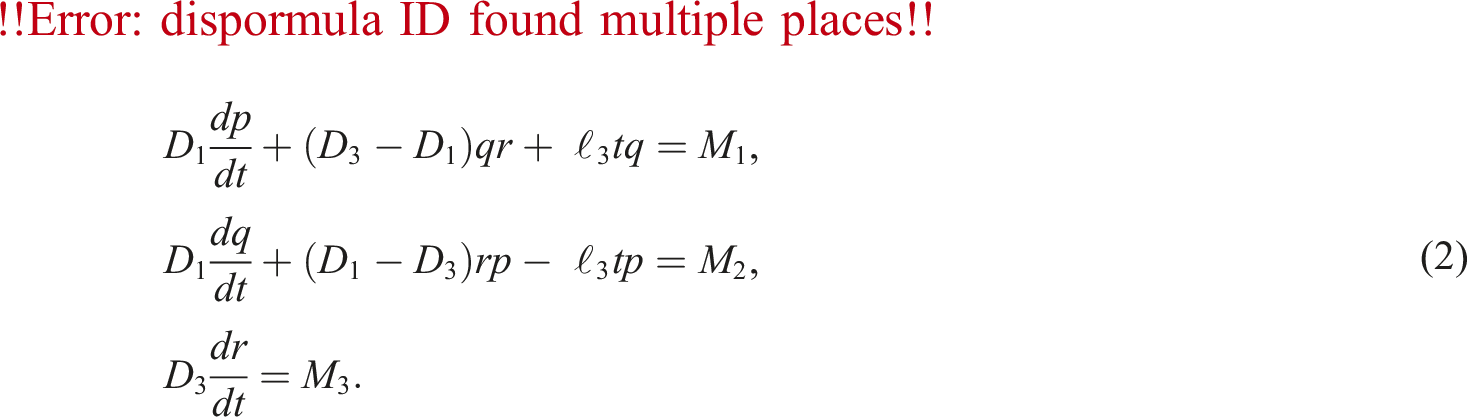



Therefore, system (4) becomes

The substitution from (3) into (6) produces

This system can be rewritten in the following equivalent form

Multiplying the second equation of (8) by

This equation outlines the axis of the desired solution, which can be attained by rewriting it in a more suitable format with the following substitution

to obtain

Multiplying (11) by


Using Taylor’s expansion
32
for





The required solutions for the angular velocity components

Another scenario to validate the approach could occur when the time-varying is change to GT







Simulation of the results
The main goal of this section is to analyze and discuss the obtained results of the projections of the angular velocity vector on the RB’s principal axes. A graphical simulation that shows the analytical solutions for these angular velocities for a range of values, is going to be presented. It also explains the motion’s stabilizing behaviors. In order to arrive at these conclusions, the data that follows is thought to be

The influence of various values of the GT on the solutions of equations (3) and (15) has been shown in Figures 3 and 4. In Figure 3, the impact on time-variation of the angular velocity components Presents the variation in the angular velocities’ values at Shows phase graphs of Figure 2 for 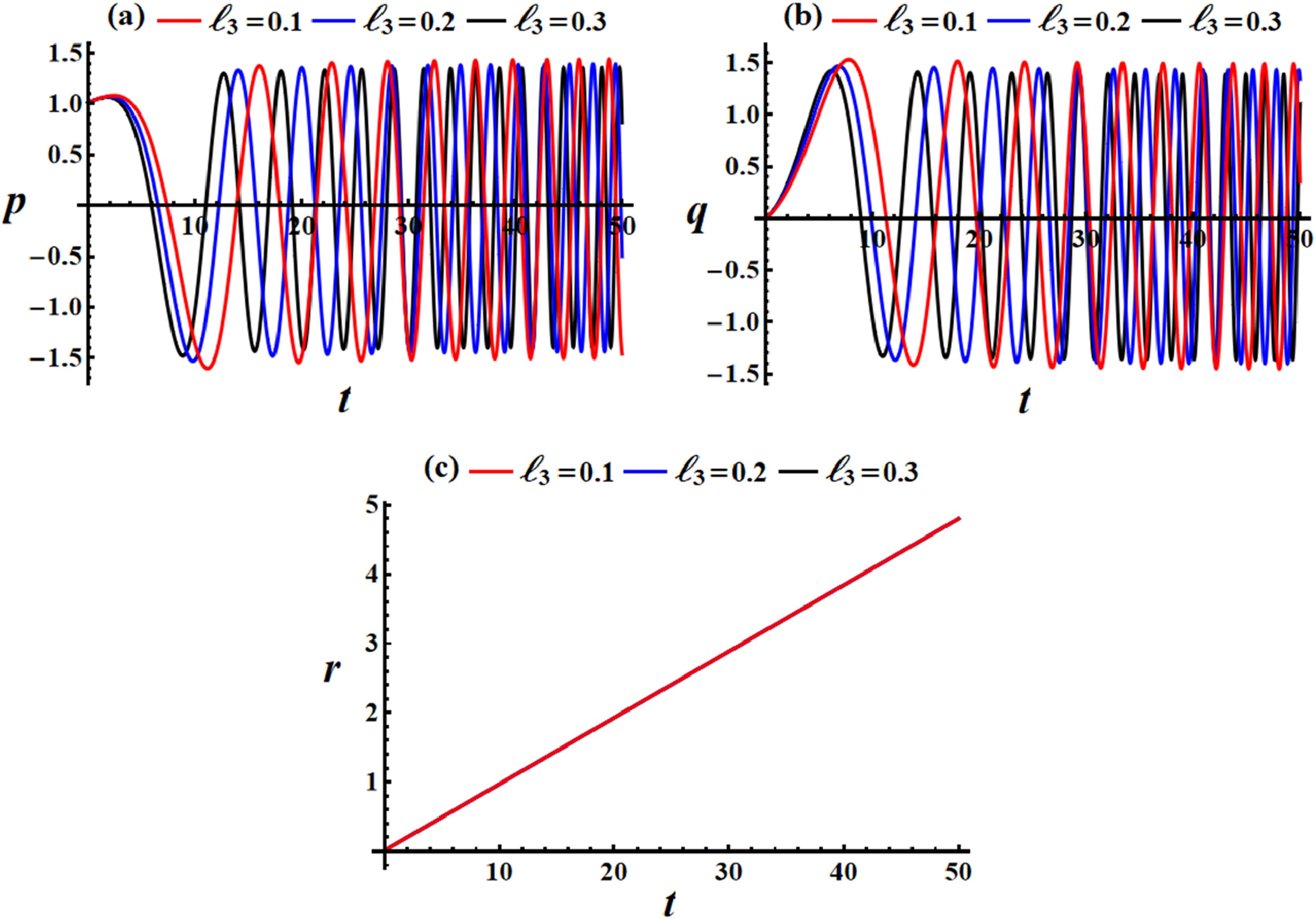
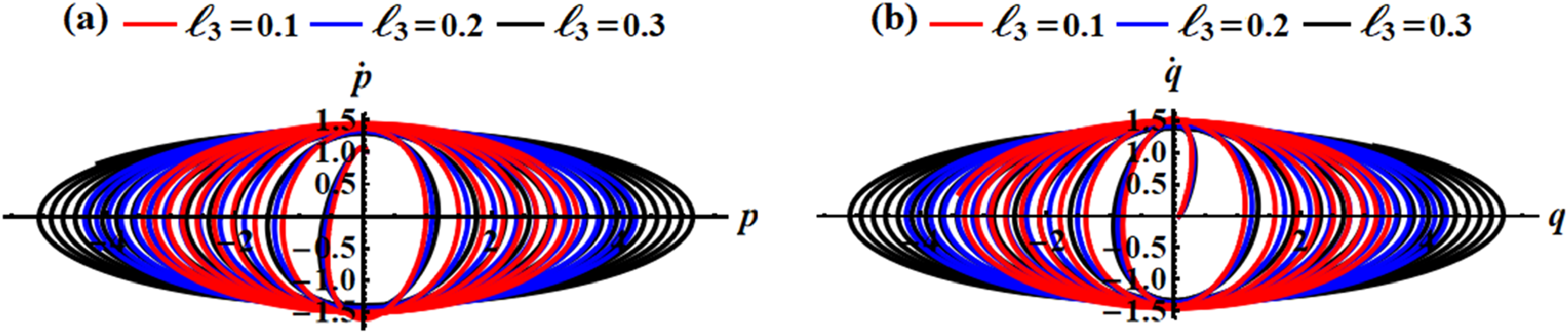
Figure 5 presents the graphs of the angular velocity components Shows the angular velocities’ variation at Express phase plane of 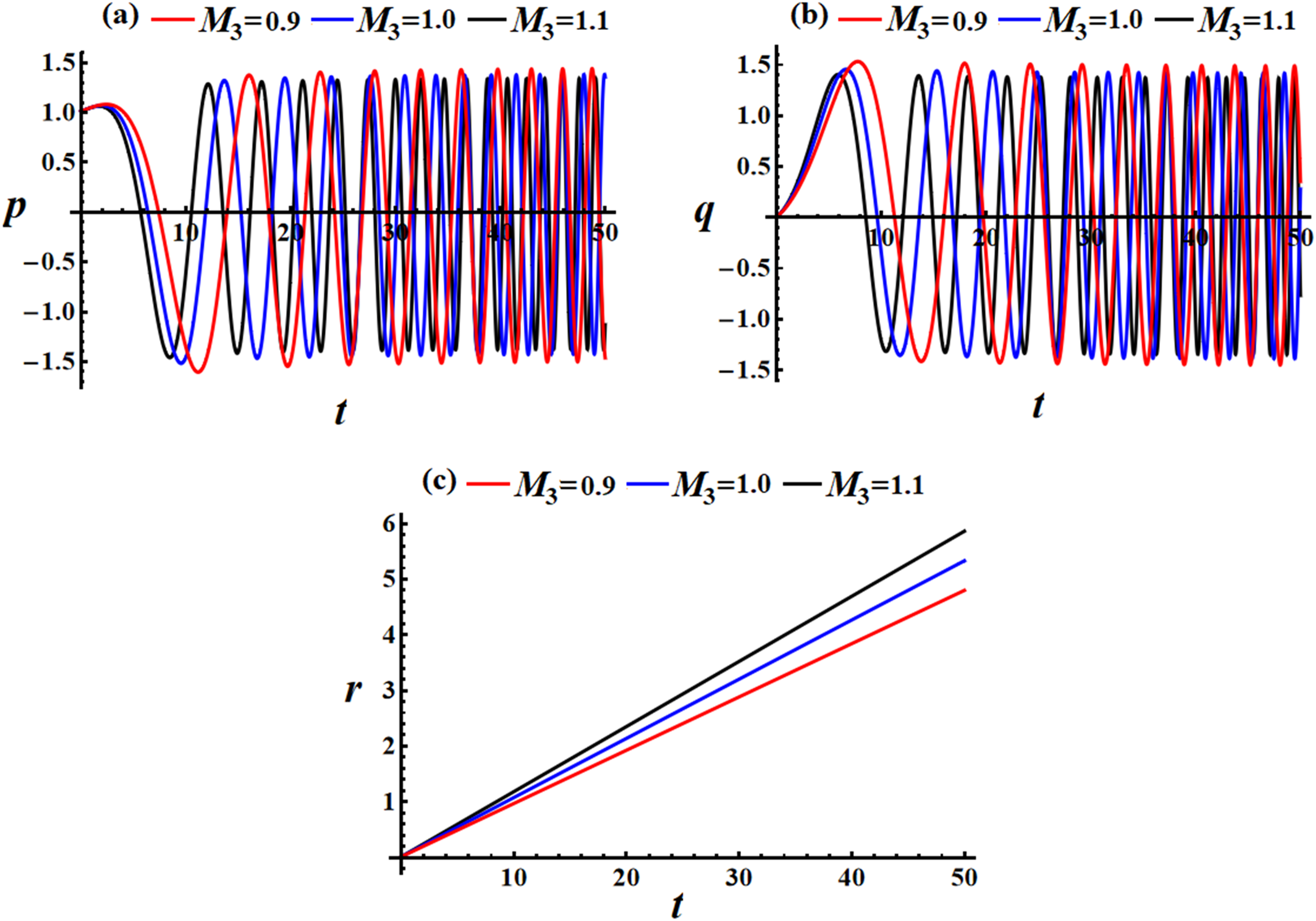
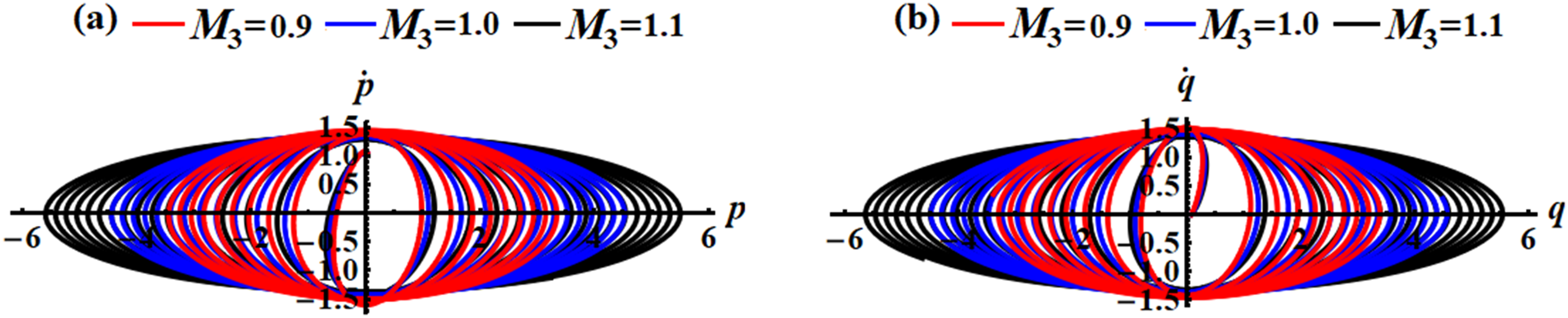
Figure 7 shows the influence of the variation of Presents the variation of 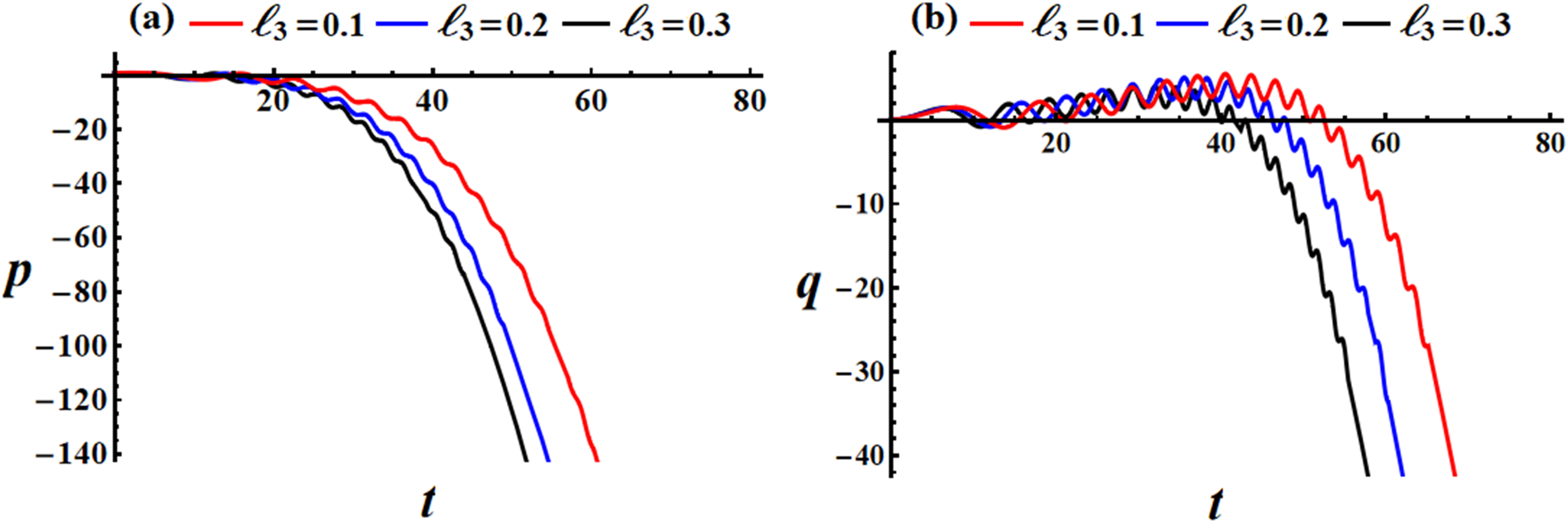
Figure 8 graphs Expresses the 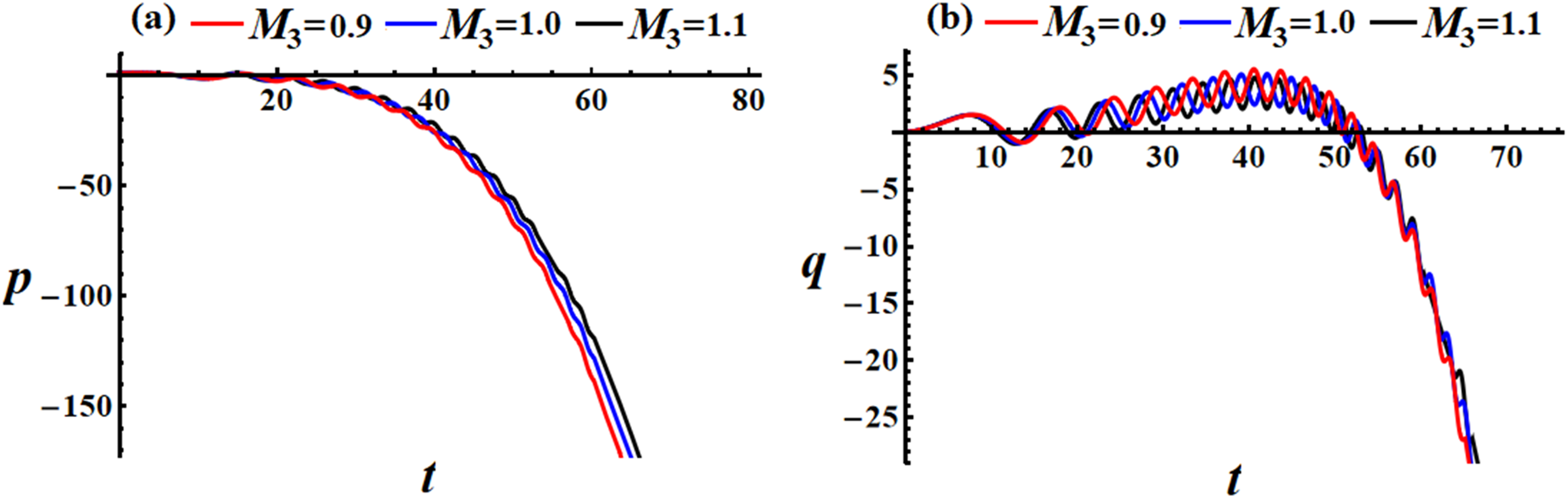
Figure 9 illustrates some of the realistic applications of the GT affecting the angular velocities of rotating RBs. It includes a spacecraft with reaction wheels for attitude control, a robotic arm on a moving platform utilizing gyroscopic stability, a rocket with a gyroscopic correction wheel, and a high-speed rotor in a drone for flight balance. Illustrates the realistic applications of the GT affecting the angular velocities of rotating RBs.
Figure 10 shows additional applications of the impact of the GT, featuring: a gyroscopic robot for space navigation ensuring directional stability, an airplane rotor demonstrating gyroscopic precession during flight maneuvers, and a racing wheel showing gyroscopic effects on balance during motion. Demonstrates the applications of the impact of the GT on the angular velocities of RBs.
Since Ref. 5 and Ref. 31 are the most recent works aligned with this research for the influence of the GT on the RB’s motion, a comparison between this work and Ref. 5 has been made for nearly symmetric and non-time-varying GT which yielded typical results with zero error between the two approaches. For the Lagrange scenario and non-time-varying GT, a comparison between this work and Ref. 5 has been also made. The GT is set to be zero in comparison with a free motion of the RB under the RBCFTs only which aligns with Ref. 3 and Ref. 4. This was carried out in order to confirm the accuracy of our research approach, especially considering the absence of prior studies looking into the impact of GT. We aimed to confirm the accuracy of our methodology by citing these related papers.
Conclusion
In this research, the nonlinear Euler’s EOMs for the RB model close to Lagrange’s case have been solved. Two external torques act on the rotational motion of this body: the first is the GT, and the second is the RBCFTs. The governing EOMs have been estimated and simplified to apply a complex form of decoupling for the DEs and approach a solution. Analytical solutions for the angular velocities have been achieved and examined under the influence of both the GT and RBCFT for two different cases corresponding to the GT. Additionally, phase portraits, which depict the stability and periodicity of the angular velocities in the system, have been analyzed and discussed. The influence of the variation of these torques on the RB’s motion has been also stated with its realistic application in our daily life. These outcomes could enhance the understanding of how GT influences the dynamics and stability of rotating RBs. The results of this study could play a pivotal role in enhancing the stability and control of mechanical and aerospace systems, particularly in areas where precise motion control is critical, such as in gyroscope design, spacecraft attitude management, and navigation systems which has been expressed in the discussion.
Footnotes
Authors contributions
T. S. Amer: Investigation, Methodology, Data curation, Conceptualization, Validation, Reviewing and Editing. A. H. Elneklawy: Methodology, Conceptualization, Data curation, Validation, Visualization, Writing Original Draft Preparation. H. F. El-Kafly: Resources, Methodology, Conceptualization, Validation, Formal Analysis, Visualization, and Reviewing.
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) received no financial support for the research, authorship, and/or publication of this article.