
Abstract
This research focuses on approaching a new technique to solve the rotary movement of a three degrees-of-freedom (DOF) semi-symmetric rigid body (RB) affected by a gyrostatic torque (GT) and under the influence of the RB’s constant-fixed torques (RBCFTs). The governing nonlinear differential equations (NDEs) for the RB are derived from the famous Euler’s equations, along with another system to calculate Euler’s angles, which gives an accurate solution for the RB’s position during its motion. In the case of a semi-symmetric body about its minor axis, novel analytical solutions for the RB’s angular velocities are presented in addition to the solutions of Euler’s angles. Our procedure to obtain these solutions arises through decoupling the governing NDEs into two coupled DEs, and the averaged time parameter is used. General solutions of the later DEs are presented in view of series expansions. The impact of the internal and external torques on the body’s motion is graphically simulated, which gives an overview of the periodicity of the derived solution and the effect of various values of these torques on the solution. Moreover, these simulations present other prospects for the body’s stability by analyzing them using the famous Lyapunov function. The importance of this study arises from its wide applications in our lives in many fields, such as mathematics and physics. It also holds immense potential for enhancing mechanical systems, elucidating celestial motion, and enhancing spacecraft efficiency.
Introduction
In the field of theoretical mechanics, the rotary movement of the RB is considered an essential problem with applications ranging from engineering to astronomy. A challenging yet fascinating problem involves rotary movement when subjected to external torques. Understanding the non-linearities introduced by the nature of the motion, interaction of GT, and RBCFTs is essential to comprehending the system’s behavior and stability. Through the provision of a thorough mathematical framework and simulation findings, this research seeks to clarify these dynamics. Euler’s equations form the cornerstone of our analysis. These equations, derived from the principles of angular momentum and torque, allow us to describe the time evolution of the RB angular velocities. By integrating these equations, we obtain a clear picture of how the RB rotary state changes under the specified torques. 1 Furthermore, Euler angles provide a robust method for representing the orientation of the RB. These angles offer a convenient way to visualize and interpret rotational dynamics, making them invaluable for both theoretical analysis and practical applications. 2 In Reference 3, the study delves into the rotatory movement of an axisymmetric spinning RB, influenced by a GT. It also takes into account the effect of transverse torques and RBCFTs, as well as an electromagnetic force field (EFF). The authors have achieved the solutions for equations of motion (EOMs) for various variables, such as angular velocities, Euler angles, and angular momentum. In Reference 4, analytical solutions for Euler’s EOMs and Euler angles are found by applying arbitrary RBCFTs to both symmetric and near-symmetric RBs. These solutions provide the RB attitude and fixed angular velocities as time-dependent functions. In Reference 5, novel derived solutions for Euler’s equations are introduced. The angular velocity components of the RB in these solutions differ from those of both symmetric ones, as well as from Euler’s case when all applied torques vanish, and from other well-known specific scenarios. In Reference 6, a study focuses on the motion of a dynamically symmetric RB containing a sphere hollow filled with viscous liquid, along with a movable mass linked by elastic coupling to a point on the symmetric axis and subjected to viscous friction. The research explores how the viscous liquid and the movable mass influenced the RB motion. In Reference 7, the goal is to investigate the stability of specific movements of the RB as it rotates around a stationary point and has a rotor rotating at a constant speed about an axis parallel to one of its main axes. EOMs are determined and formulated as a Lie–Poisson Hamilton system. Permanent rotations are computed and analyzed in terms of mechanical interpretation. The kinematics of an RB revolving about a stationary point in a Newtonian force field (NFF) with a spinning couple about their major axes of inertia are examined in Reference 8. Consideration is given to the reality of the first integrals. Additionally, they look for a solution to the problem of the motion of an RB around a fixed point when an NFF with an encircling couple is acting on it as a specific instance of the fourth integral. The cases of Kovalevskaya and Lagrange are acquired. An incompressible viscous substance is contained within a spherical chamber within the RB. 9 It considers the effects of resistive torque, GT, and RBCFTs. The movement regulating scheme is made simpler by applying an averaging technique (AT). To solve the averaged RB’s EOMs, Taylor’s approach is also utilized, taking into account specific initial conditions to achieve the intended results. In Reference 10, a model of a charged asymmetric RB in the presence of GT, EFF, time-varying, and constant body torques is presented. Novel solutions for the mentioned problem have been approached for the RB’s angular velocities and Euler angles. In Reference 11, the modification of disruptive Euler-Poinsot motion is conducted under the impact of modest inner and outer torques. The authors use the AT to create an approximate solution for a system of Euler’s EOMs that includes additional perturbation terms. This system is applied to a nearly dynamically spherical RB and is situated in a resistor medium, with a viscous fluid inside. In Reference 12, another model concerning the processing technique in Reference 11 is presented for an RB’s model with a hollow filled up with viscoelastic fluid. In Reference 13, the authors introduce a novel technique for solving EOMs governing the dynamics of a charged RB. This approach has previously been used in different areas of mechanics such as Euler–Poisson equations. The same solving procedure is applied to solve the momentum equation for the dynamics of a charged particle under the influence of Lorentz force in a non-relativistic scenario. In Reference 14, a novel approach is introduced to solve EOMs for confined orbits of a small RB, which, in the elliptical constrained three-body problem, has restrictions by being moved close to a planet ER3BP. A new method for obtaining the coordinates of the small RB with its trajectory close to the planet is implemented. The authors use a system of EOMs to approach both semi-analytic and analytic solutions. In Reference 15, the process of numerically integrating the averaged EOMs is carried out to analyze the rotary motion of an RB in a linear dissipative environment. The study focuses on a new category of rotary movements of the Lagrange’s top, investigating the effects of an unsteady perturbation torque and a slowly changing restoring torque that is influenced by the small nutation angle. In Reference 16, the RB experiences the impact of the fluid’s viscous movement and the GT around the main inertia axes. The EOMs’ system controlling the motion is established, and the AT is applied approach to a solution for the problem. In Reference 17, a study analyzed the rotary of an RB hanging from a spring, treating it as a pendulum model with 3DOF. The assumption is made that the RB moves uniformly in a rotating vertical plane with a given angular velocity. EOMs are derived using Lagrange’s equations and numerically solved using 4th-order Runge–Kutta algorithms implemented through MATLAB. In References 18 and 19, Poincaré’s small parameter technique is used to approach the solution for the problem; for a symmetric RB’s model with the impact of GT, and EFF 18 and for a charged symmetric gyrostat with his mass center shifted away from the symmetrical axis of rotation with GT and EFF. 19 In Reference 20, researchers have observed the 3D movement of the RB around its primary inertial axes relative to a stationary point. The unique aspect of this research is its exploration of the impact of GT and EFF, in addition to NFF as outlined by the Bobylev–Steklov conditions. This type of motion is characterized by the ability to impose a significant constraint on the governing EOMs by increasing the angular velocity projection around the body’s axial axis. This constraint enables simplification of the governing EOMs, alongside the existing first integrals, to a more manageable system of two semi-linear DEs of 2nd order and one first integral. The researchers can derive novel solutions to these equations by utilizing Poincaré’s small parameter technique. In Reference 21, a similar model is presented for Lagrange’s gyroscope with GT, NFF, and without the impact of EFF. With a similar processing, Poincaré’s small parameter technique is used to obtain the system’s analytical solutions. In Reference 22, researchers have conducted a study on restricting scenarios of an RB undergoing thrusting with RBCFTs. This is achieved by applying the concepts of angular velocity, Eulerian angles, transverse, and axial displacements. The study has focused on an axisymmetric spin-stabilized RB in an inertial frame, considering RBCFTs and transverse torques. Results have shown that these restrictions can be determined for high spin rates and geometric shapes such as a sphere, a thin rod, and a flat disk. Additionally, the study has confirmed that these findings are applicable to axisymmetric, nearly axisymmetric, and asymmetric RB. In Reference 23, a close-to-symmetrical RB in rotation encounters transverse and RBCFTs. The nearly identical shape of the RB and the lack of torques along the spin axis cause the spinning speed to stay relatively constant. Reduced solutions for the RB’s orientation, rotation, and movement are given, assuming small angular deviations of the spin axis. These succinct solutions, given in a sophisticated format, are ideal for researching spacecraft motions. When these solutions are applied to the normal movements of spacecraft, such as Galileo spacecraft, comparative analyses show how accurate these solutions are. In Reference 24, numerical simulations are employed to assess the RB potential in order to find appropriate gravity estimate models and ideal modeling circumstances. Using length units determined by the mean radius of each celestial object rather than SI units, the author has investigated the RB potentials and gravitational estimate models on eight minor celestial objects. In Reference 25, an investigation of the movement of an asymmetrical RB under the RBCFTs effect has been carried out. The study has concentrated on applying Fourier series expansions to find periodic solutions for the RB’s angular velocities and associated kinematics parameters. With a predetermined error limitation for comparison, three distinct semi-analytic solution approaches are presented, and their computing efficiency is assessed. In Reference 26, a study has analyzed the RB’s movement about its mass center when it is exposed to RBCFTs and has a chamber containing an intense viscosity fluid. Under the influence of tiny inner and outer torques, the trajectory of RB’s movement is described by asymptotic solutions. The movement of a gyrostat with a fluctuating GT under the influence of gyroscopic and potential forces is studied in Reference 27. Based on three linear fixed relationships involving the angular velocities of the gyrostat, three new solutions to the EOMs are developed. In Reference 28, the criteria for invariant relationships and specific solutions of Grioli’s equations regarding the movement of the RB with a stationary point are examined. Innovations in the derivation of solutions for EOMs of the RB with a stationary point are introduced. A 2DOF nonlinear system is analytically solved via the multiple scales technique in Reference 29. The solvability conditions are obtained in light of removing secular terms. All resonant phases are categorized to comprehend the system’s equilibrium. Using Routh–Hurwitz criteria, all likely fixed points are located at the zones of stability and instability. In Reference 30, the authors examine the movement of a heavy gyro with its mass center positioned on one of the main inertia axes. They identify the potential permanent rotations and establish stability criteria using the Energy-Casimir approach. Through their study, they demonstrate that there are stable permanent rotations achievable in any spatial orientation of the gyro, facilitated by the interaction of two spinning rotors, with one aligned along the main axis where the mass center is located. In Reference 31, an analysis is conducted on a gyrostat in a circular orbit where its GT is aligned with the orbital speed and lies tangent to the orbital plane. The study focuses on the body’s equilibrium points, the potential for multiple equilibrium points, and the conditions for their stability over time. In Reference 32, the authors have presented new analytical findings in the context of separatrix surfaces, equilibrium manifolds, periodic or non-periodic solutions, and the extreme of periodic solutions for both cases of RBCFT applied along the minor and middle axes. In reference to the case of RBCFT on the major axis, a computer simulation of the displayed findings for the paths of the angular velocities in distinct areas is provided along with a numerical solution for the problem. Additionally, each case’s GT impact is investigated, and comprehensive modeling for the body’s stabilization is presented. The RB’s model in the scenario of Lagrange’s gyroscope under the influence of perturbing moments, NFF, and GT is investigated in Reference 33. To apply the AT, an average system of regulating EOMs is obtained. The application of linear dissipative moments is presented in view of this system.
This study focuses on developing a new method to address the rotary movement of a 3DOF semi-symmetric RB impacted by GT and RBCFTs. The nonlinear DEs governing the RB’s motion are derived and scaled from Euler’s equations and another system for calculating Euler angles, leading to an accurate description of the RB’s position during motion. This paper provides novel analytical solutions for the RB’s angular velocities and Euler angles when the body is nearly symmetric about its minor inertia axis. Our novel approach is based on the decoupling of three regulating NDEs to be two coupled DEs. Moreover, the averaged time parameter is utilized to obtain the required general solutions for these DEs, which are then provided along with homogeneous particular solutions with the use of series expansions. Graphical simulations illustrate the impact of internal and external torques on the RB’s motion, demonstrating the periodic nature of the solution and how different torque values influence the outcome.
Problem’s formulation and solution procedure
In the analysis of the RB’s motion with respect to two reference frames originating at point RB’s model.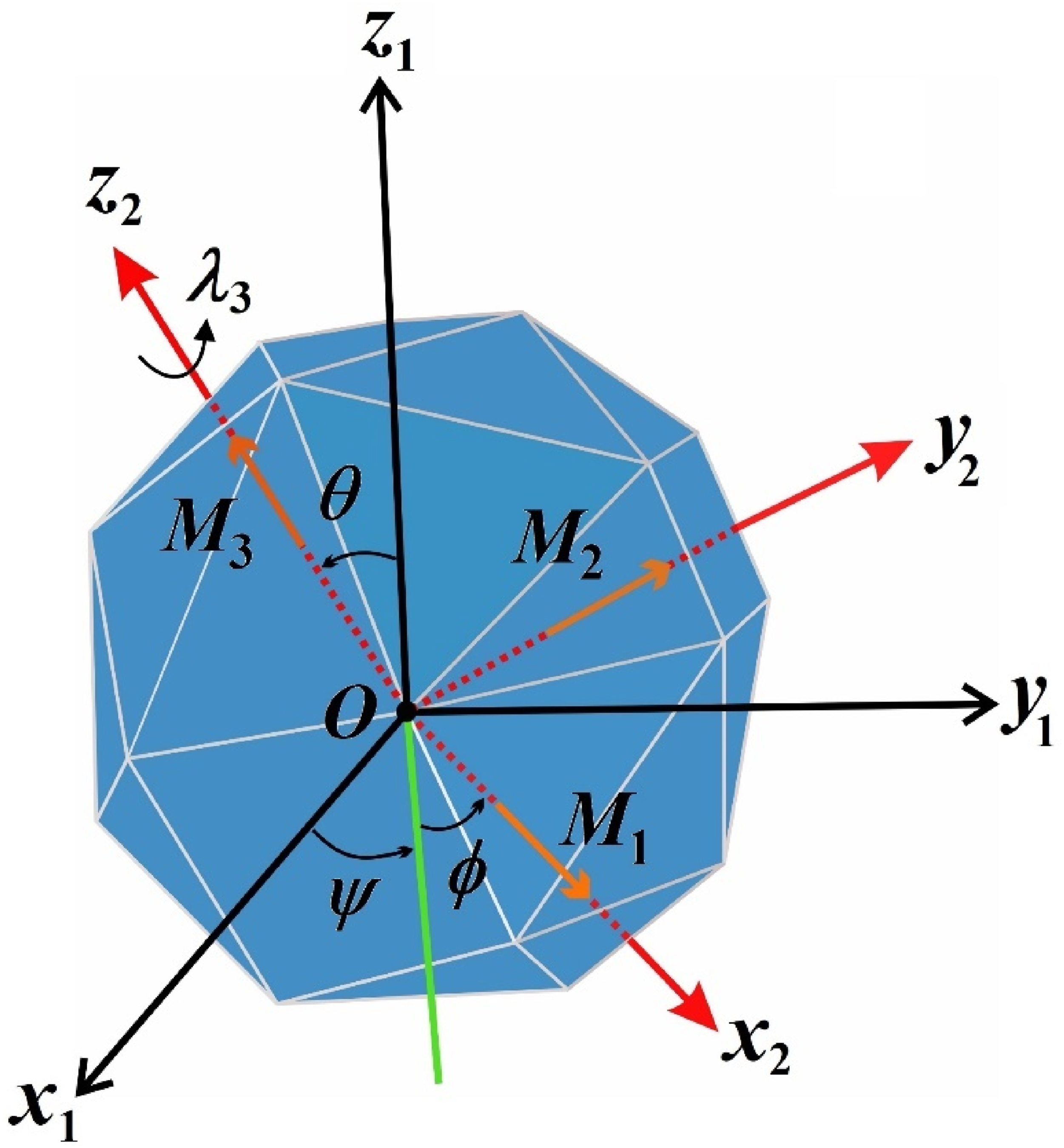
Hence, Euler’s EOMs with respect to the influence of the GT1,3 are




The substitution of this solution into (1) reduces its equations to the below-coupled equations for the variables

According to this system (3), it is extremely difficult to deal with. To treat this difficulty, consider the following substitutions aiming to simplify this system:

Therefore, system (3) becomes

For a nearly axisymmetric scenario, as mentioned previously, one writes

It must be noted that this system consists of two coupled linear DEs with constant coefficients. If the independent parameter is changed appropriately, the time-dependent coefficients can be eliminated
4
as

Therefore, system (6) transforms into

The following equation can be stated in terms of the newly established variable

It must be mentioned that extra caution is thought to be required while selecting the correct root when the signs of
As soon as


Differentiating both equations in the system (11) and making use of the original equations before differentiation to decouple its equations in the form

Equation (12) will have solutions that can be reached for all
It is now reasonable to adjust the parameters one more time. Considering

Consequently, equation (12) becomes

The general solution of (14)’s first equation has the form


The particular solution

Hence,


Noting that
Similarly, the general solution of the second equation in (14) has the form

The homogenous solution



It is worth mentioning that solving Euler’s equations is crucial for designing and controlling systems in aerospace engineering, where the stability and control of aircraft and spacecraft depend on accurate modeling of rotational dynamics. In robotics, these equations aid in the precise movement and positioning of robotic arms and autonomous vehicles. Furthermore, in biomechanics, they are used to study the motion of human limbs and joints, contributing to advancements in prosthetics and orthopedics. Thus, mastering Euler’s equations not only enhances our theoretical understanding of rotational dynamics but also drives innovation and efficiency in practical applications, highlighting their critical role in advancing technology and improving human life.
Determination of Euler angles
Let’s consider the following representation of symbols
The system of equations (27) can be solved to obtain the time-dependent body’s orientation. Unluckily, the formulas are generally nonlinear and therefore exceedingly challenging, to solve. Assuming that

Given that

Integrating (29) to obtain the time-dependent expression of


Making use of equation (2) into (28) yields

Now, we are going to simplify (31) by introducing the below new variable


From (32), one gets the expression of


Differentiating equations of the above system (35) with respect to

As mentioned in the previous section, one can get the solutions to the equations of this system in the forms






In light of the significance of Euler angles, one can state that their determining is essential in RB kinematics, as they provide a systematic way to describe the orientation of the RB in a three-dimensional space. They are defined by three sequential rotations about different axes and offer a clear and concise representation of the body’s rotational position, which is critical for various applications. In aerospace engineering, these angles are used to control and navigate aircraft and spacecraft, ensuring precise maneuvers and stability during flight. In robotics, they facilitate the programming of robotic arms and mobile robots, allowing for accurate movement and task execution in complex environments. In computer graphics and animation, Euler angles enable the realistic depiction of object rotations, enhancing visual realism. Additionally, in biomechanics, they are employed to analyze human joint movements, contributing to the development of better prosthetic devices and rehabilitation techniques. Therefore, understanding and applying these angles is pivotal for the accurate modeling, control, and analysis of rotational movements in both theoretical studies and practical implementations.
The Numerical Solution of Euler’s Equations
The subsequent condition-space formulation can be used to define the equations in the system (1), where the variables that represent the state are the angular velocities
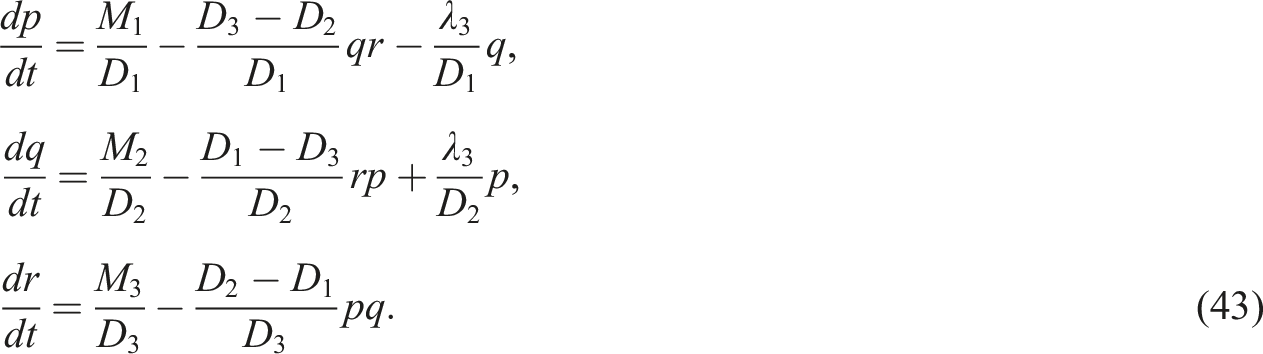
By knowing the value of the RB’s main inertial torques, the GT, the RBCFTs, and the initial condition of the RB’s angular velocities, equations in (43) can be numerically integrated to obtain solutions
In the following section, the numerical values of the parameters that are employed to produce the impending figure for the analytical and numerical solutions will be provided. Here are the numerical initial conditions that required to derive the solutions Outlines the distinction between the analytical solutions and numerical ones of the angular velocity components at 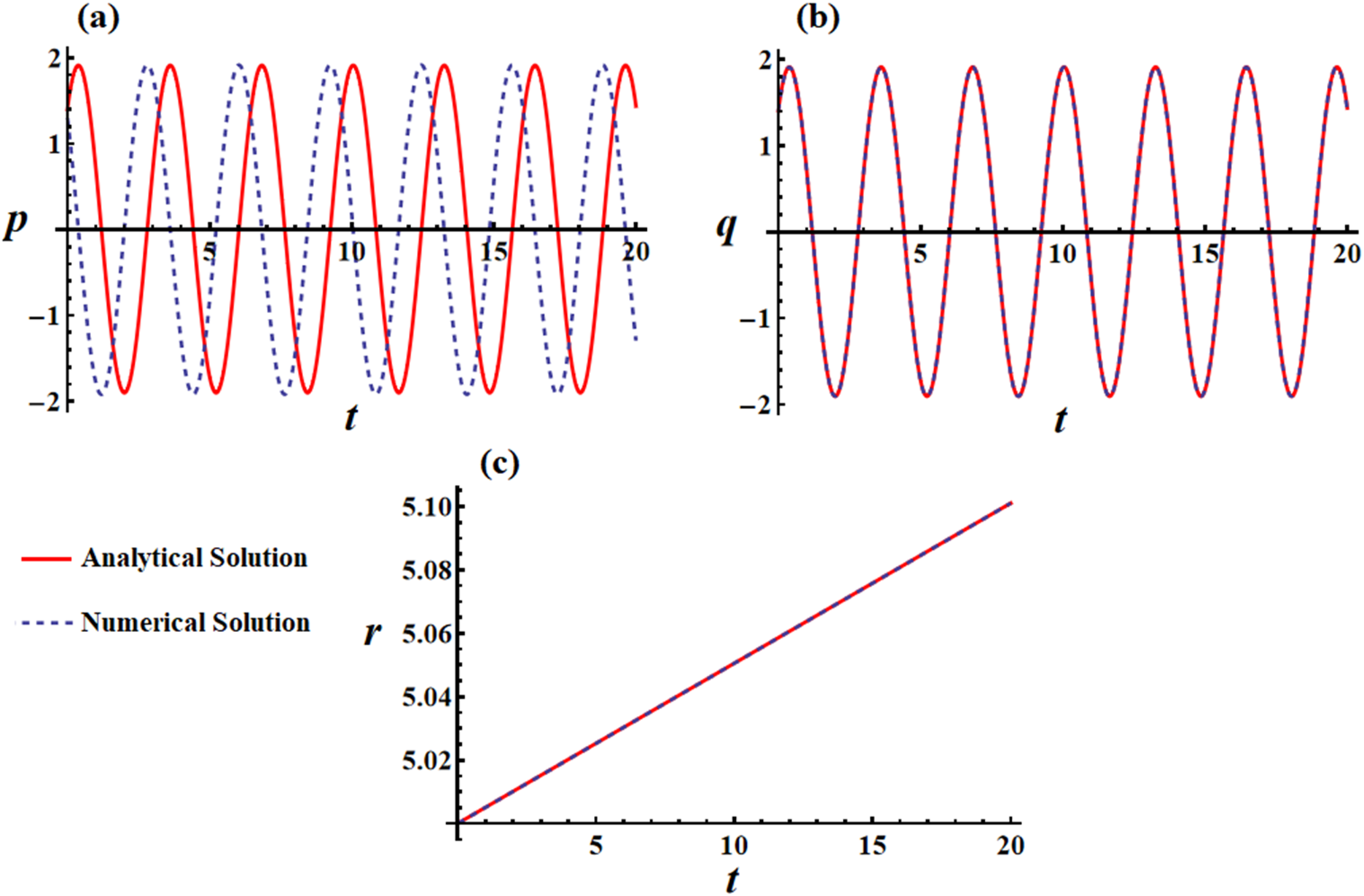
Results and discussion
Here, our primary objective is to present a graphical representation that demonstrates the achieved analytical solutions for a variety of parameters, such as Euler angles and angular velocities. It also provides a clarification of the motion’s stabilization properties. To support this objective, the following data is thought to be indispensable

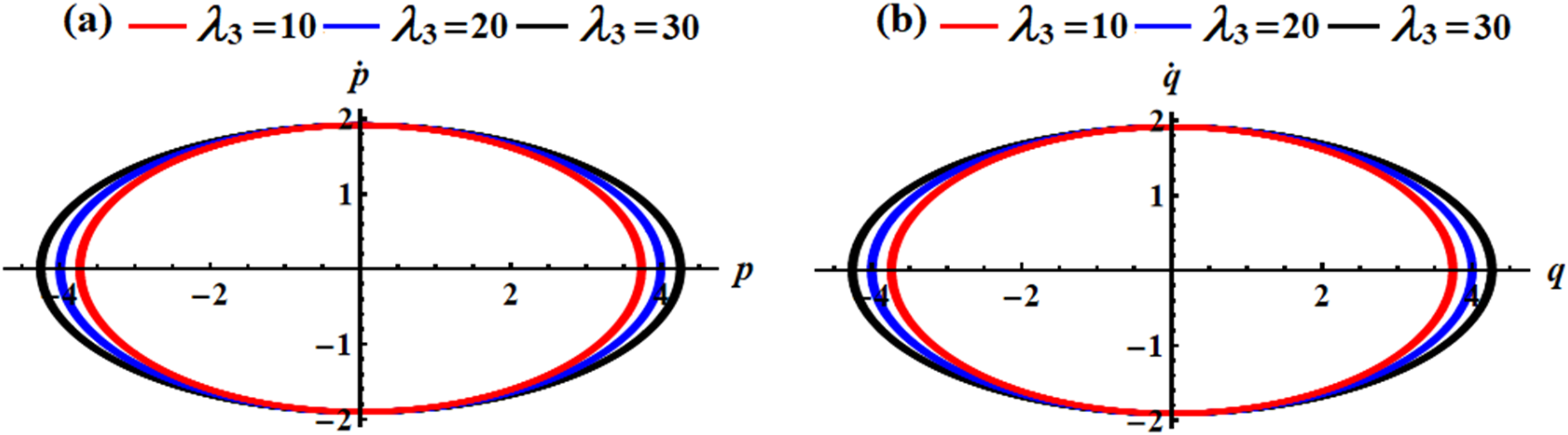
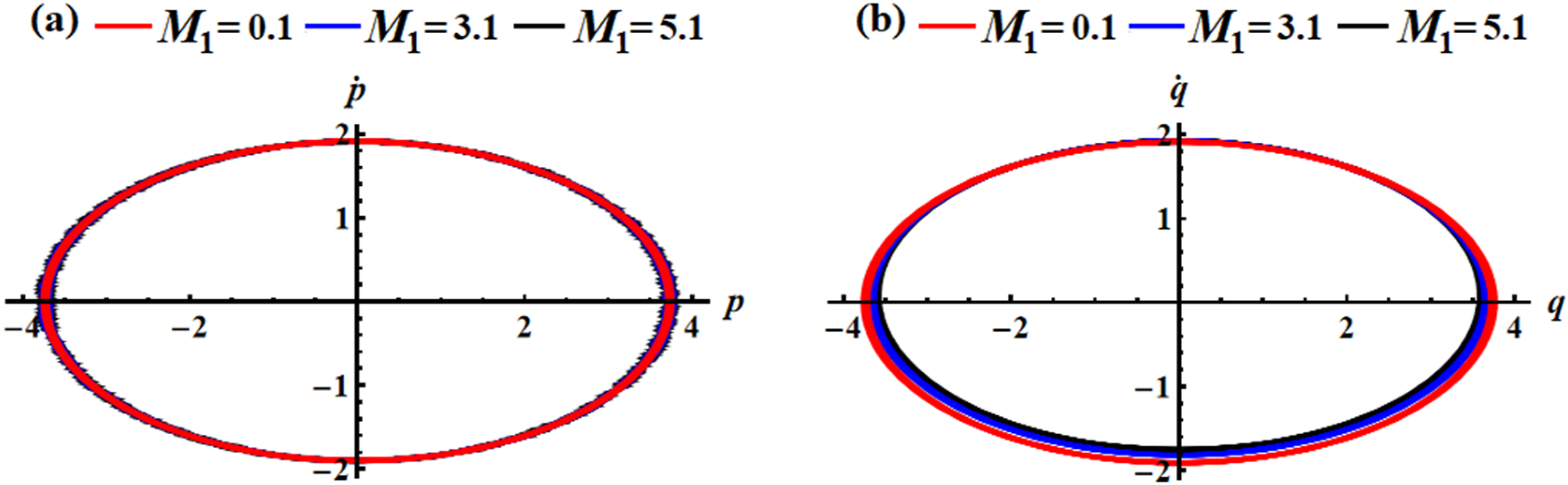
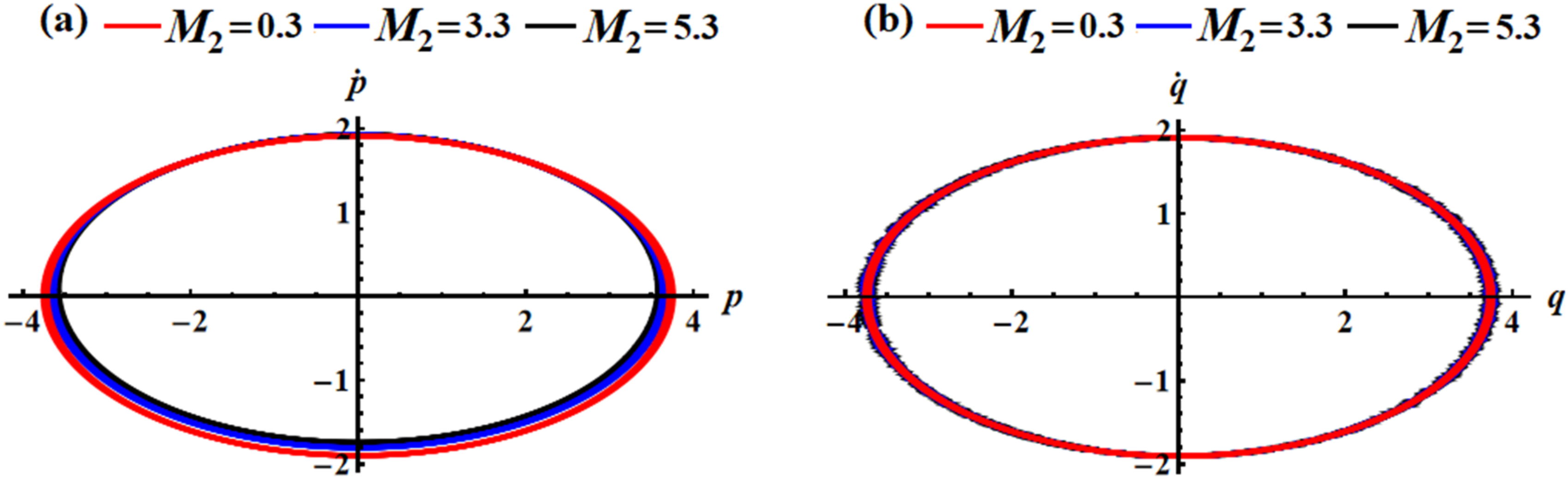
To examine the impact of the GT on motion, a simulation is examined at different values of the GT Presents the solution’s variation for Plots phase graphs of Shows the solution’s variation for 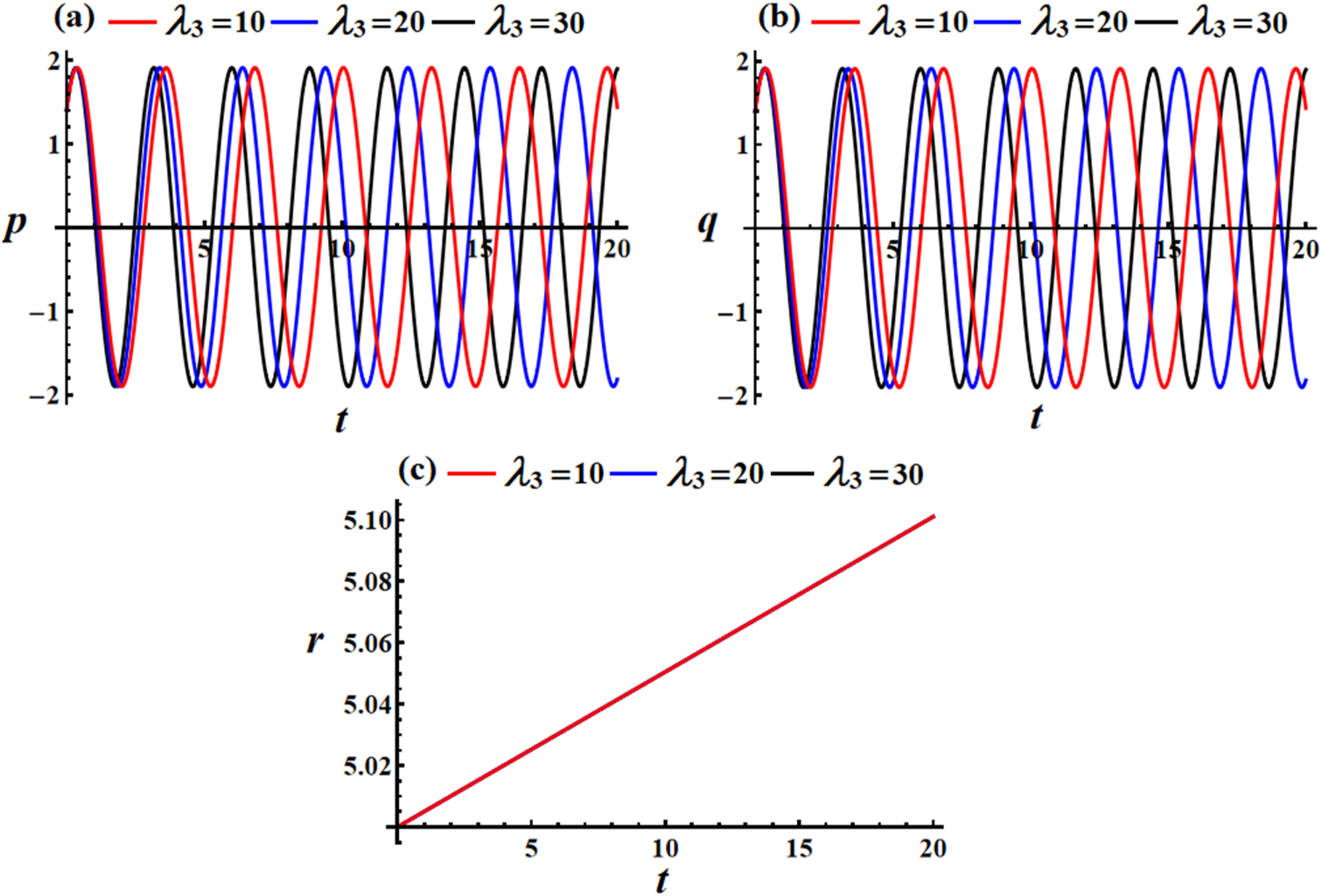
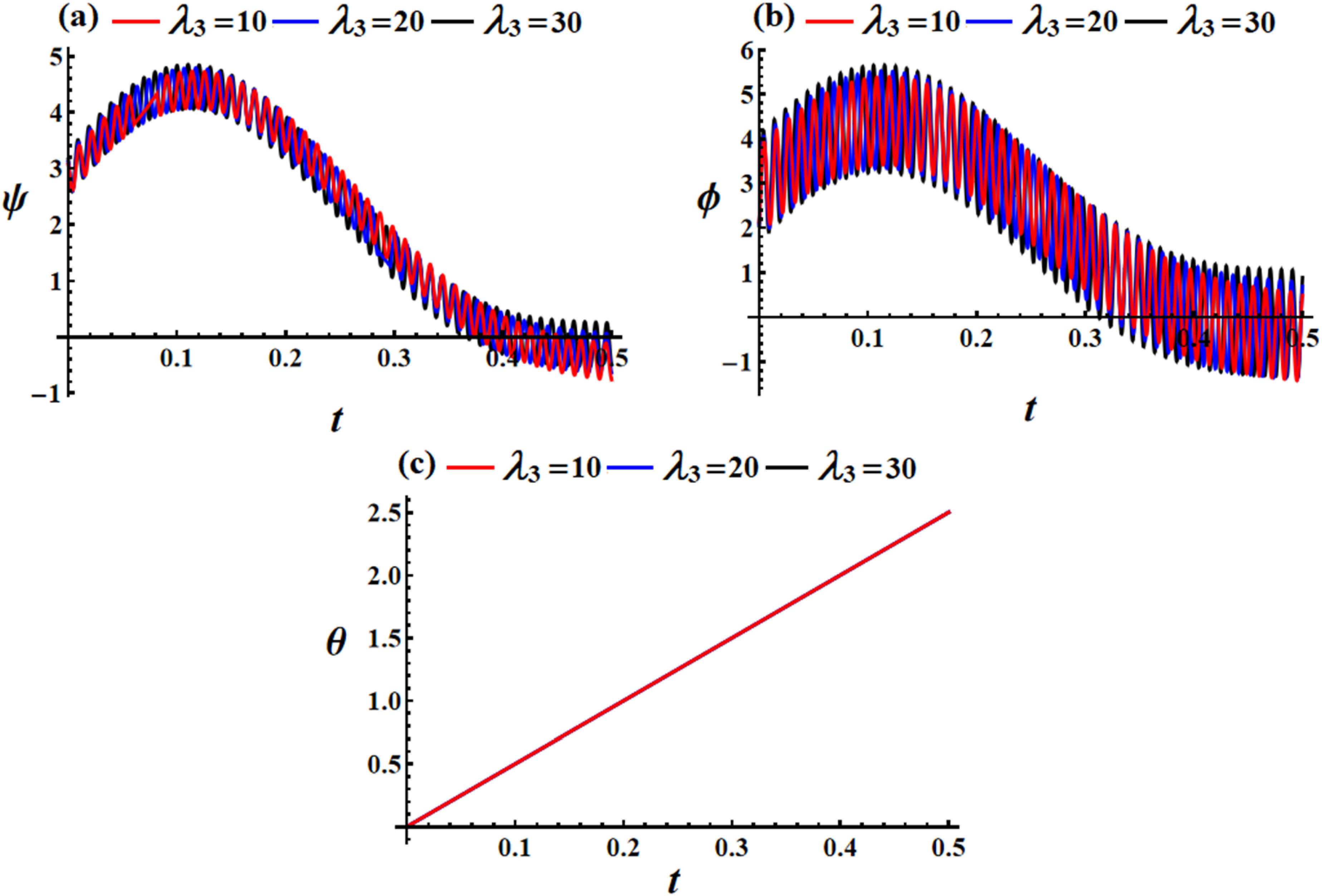
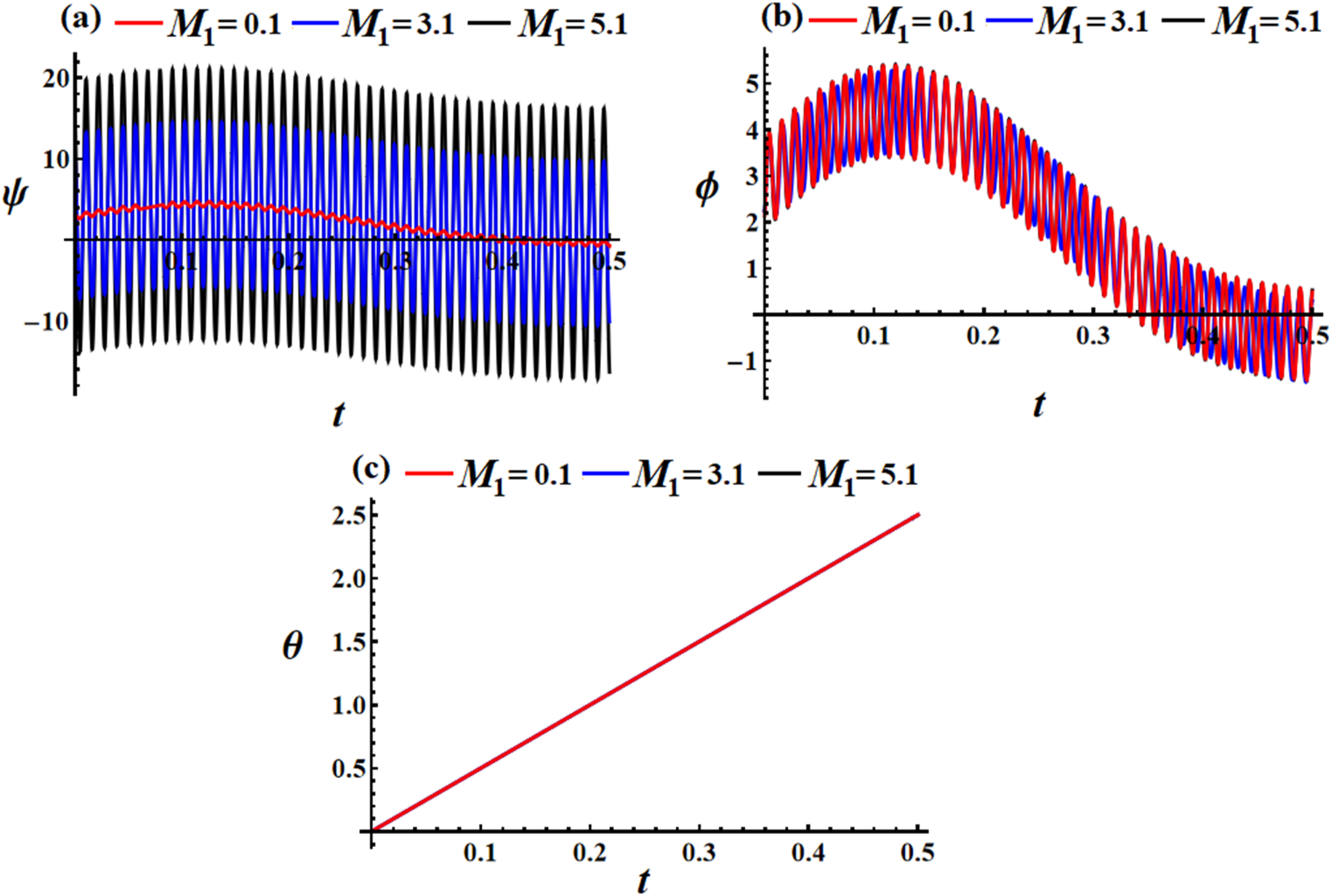
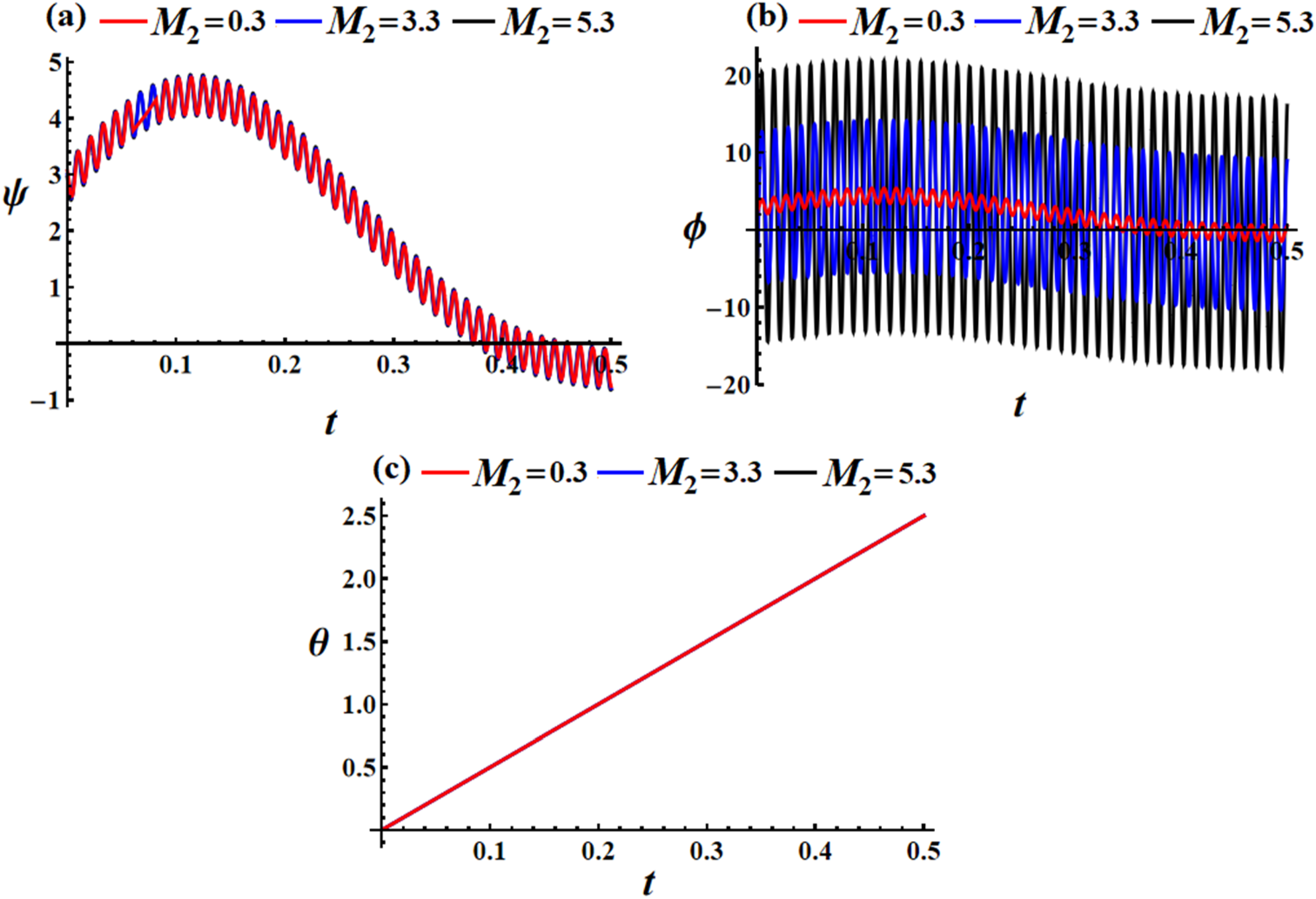
In order to observe how the RBCFT about the Graphs of the RB’s angular velocities’ solution at Diagrams of phase plots for Describes the variance of Euler angles at 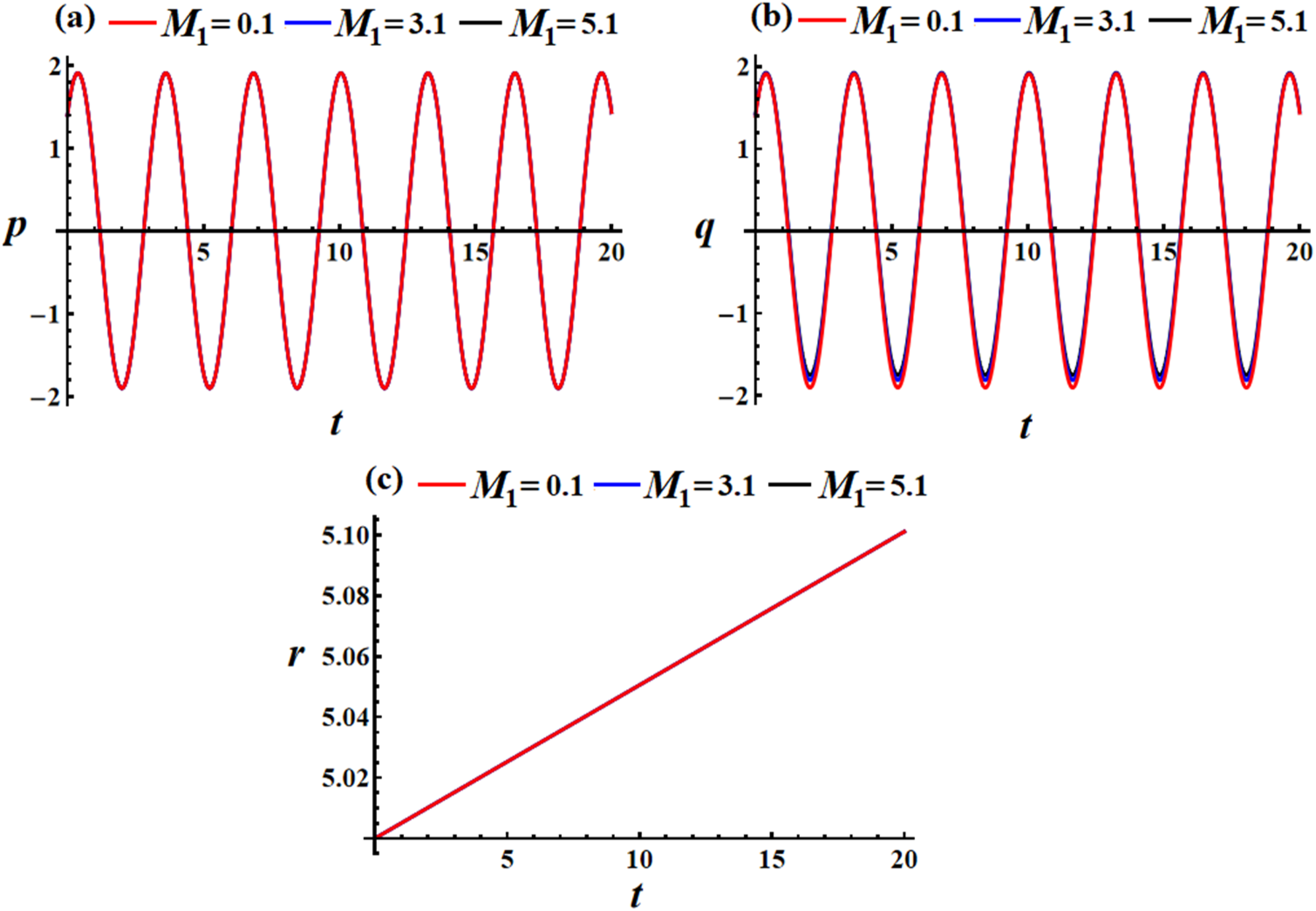
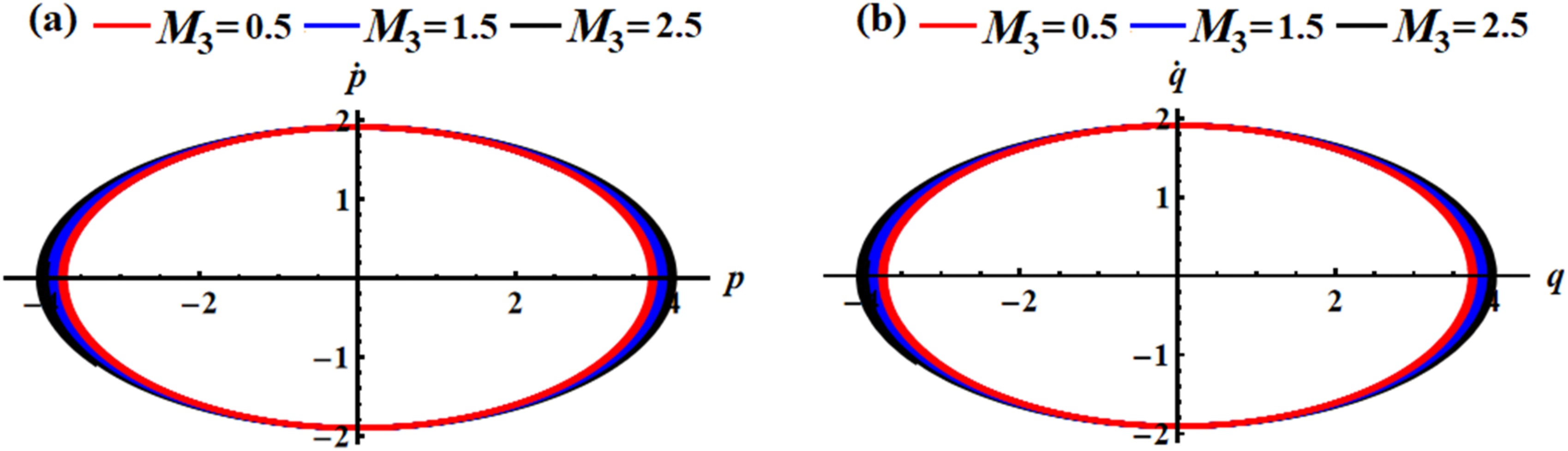
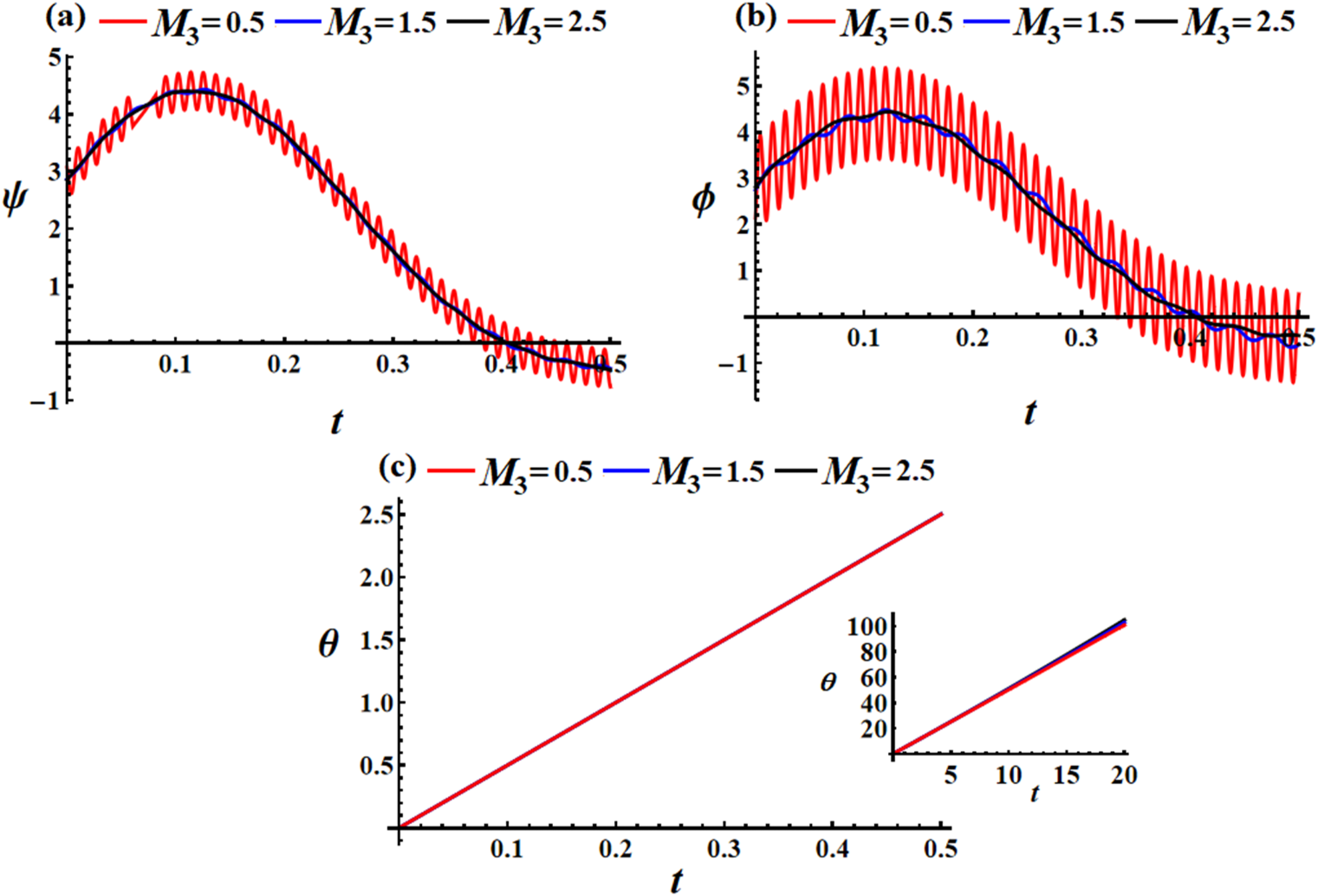
To observe how the RBCFT about the Shows the variation of Describes phase plots of Graphs the variation of 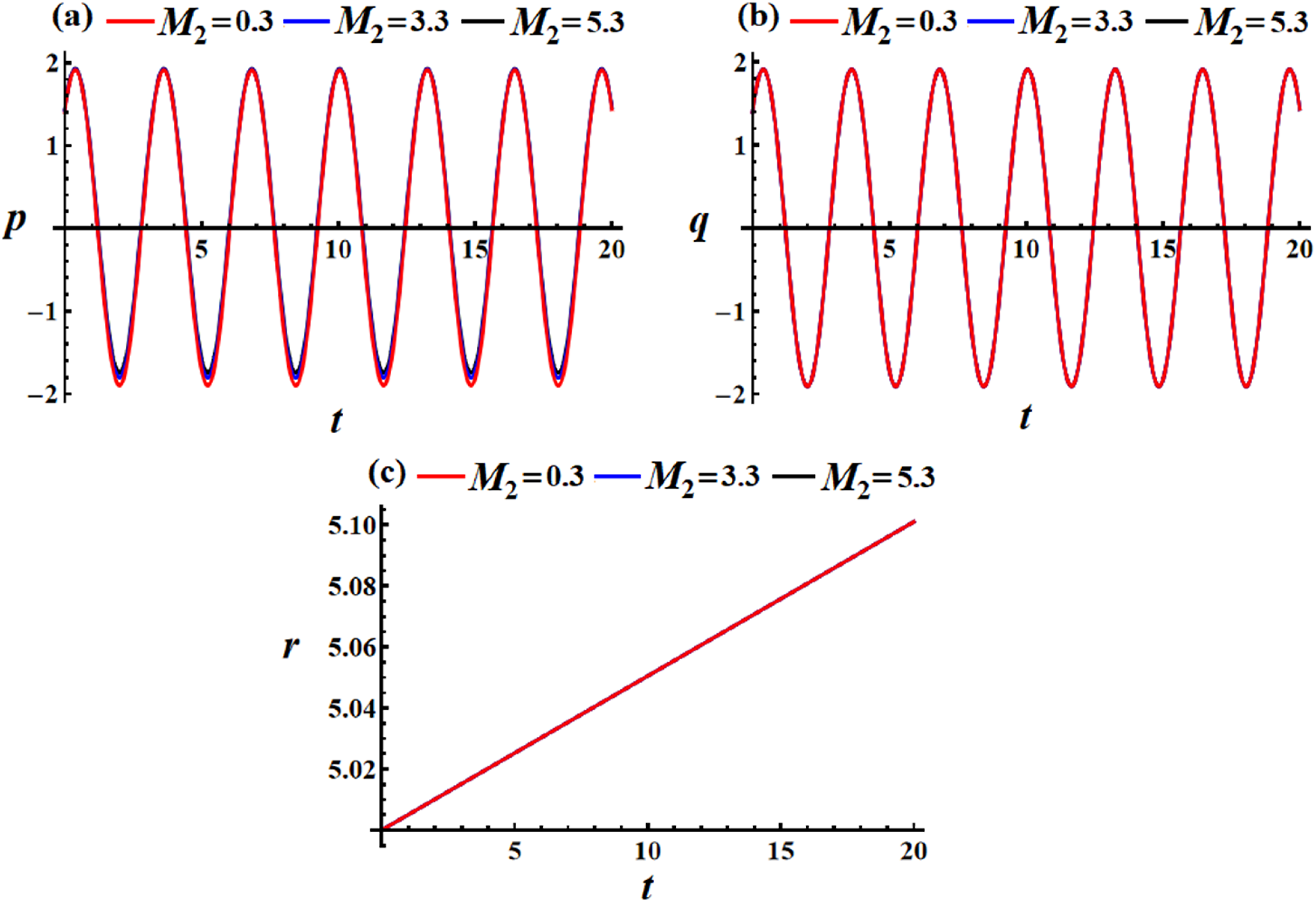
The implications of Shows the angular velocities’ variation at Explores the phase graphs for Plots Euler angles’ variation at 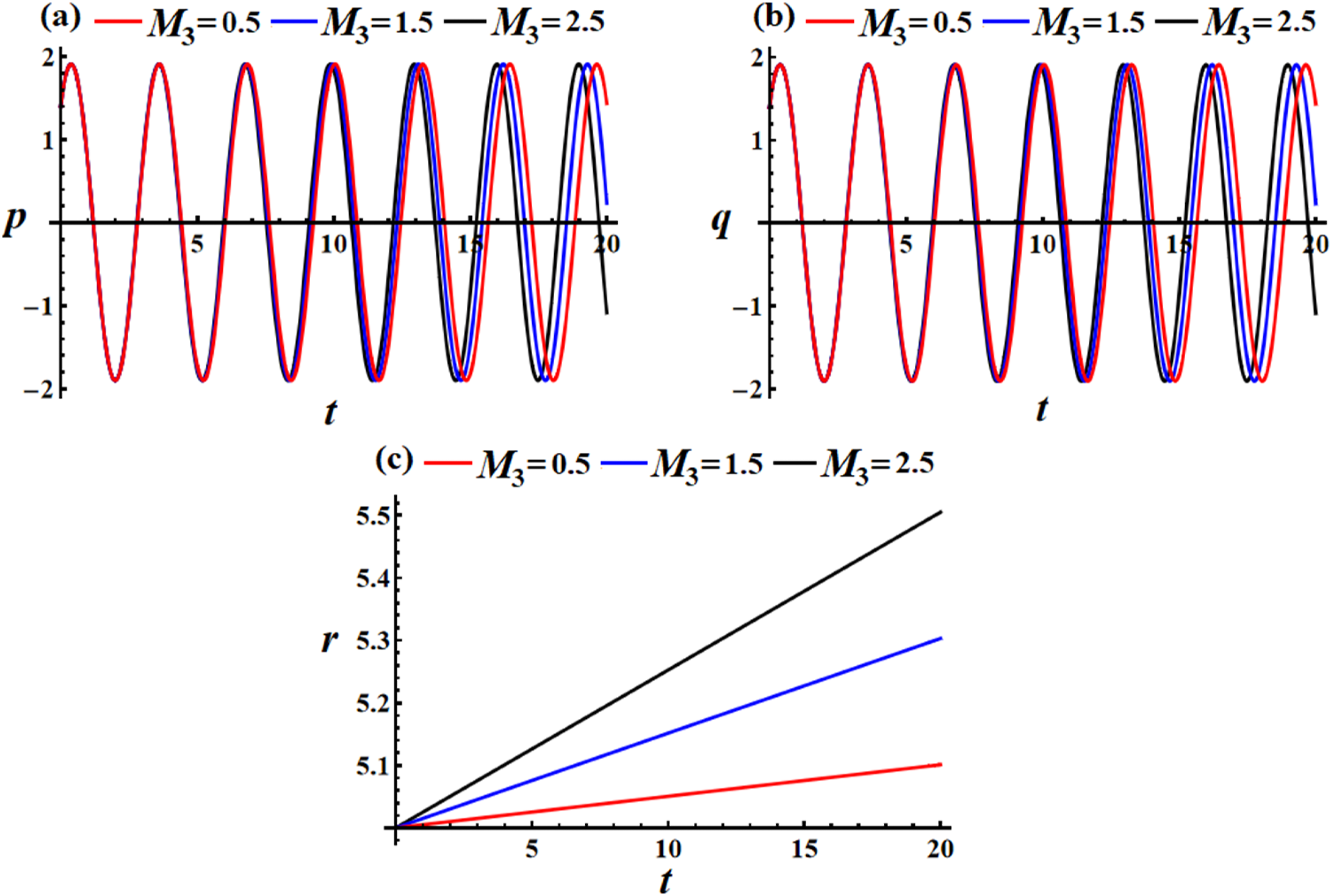
Conclusion
To study the rotational motion of a 3DOF semi-symmetric RB influenced by GT and rotational body-coupled forces and torques, a novel investigation has been conducted. This approach involves decoupling the three EOMs into two coupled equations, applying an averaged time parameter, and then deriving a general solution for the DEs in light of a series expansion. The well-known Euler’s equations, which are used in another system to compute Euler angles and provide an accurate solution for the RB location during motion, are the basis of the governing EOMs for the RB. New analytical solutions for the RB’s angular velocities and a solution for the Euler angles are offered for the scenario of a nearly symmetric body about its minor axis. An overview of the periodicity of the calculated solution and its impact from varying torque values can be obtained through the visual simulation of the effects of internal and external torques on the body’s motion. Additionally, these simulations offer additional possibilities for RB stability through analysis using the well-known Lyapunov’s function. This study is significant since it has multiple implications in various areas of our lives, including physics and mathematics. It also has enormous promise for improving spaceship effectiveness, clarifying celestial movement, and improving mechanical systems.
Footnotes
Author contributions
T. S. Amer: Investigation, methodology, data curation, conceptualization, validation, reviewing, and editing. A. H. Elneklawy: Methodology, conceptualization, data curation, validation, visualization, and writing-original draft preparation. H. F. El-Kafly: Resources, methodology, conceptualization, validation, formal analysis, visualization, and reviewing.
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) received no financial support for the research, authorship, and/or publication of this article.
Data availability statement
Data sharing does not apply to this article as no datasets were generated or analyzed during the current study.