
Abstract
This study presents a reliable and precise solver for solving several kinds of nonlinear evolution equations. The subequation approach is the basic ingredient of this solver. In this regard, a solver is created to precisely resolve and depict the nonlinear evolution equations’ whole wave structures. This analysis offers the whole information obtained in the representation of solutions to these equations. The robust solver offers hyperbolic, trigonometric, and rational forms of solutions. A set of test problems drawn from the literature are provided in order to validate the accuracy of the proposed solver. The solutions that were discovered could be useful for a vital recent applied science observations. The method that was demonstrated is a tool that mathematics, engineers, and physicists can use as a box solver. Theoretical analysis and reported solutions show that the suggested solver is suitable and efficacious.
Keywords
Introduction
Nonlinear evolution equations (NLEEs) may be used to explain a wide range of complicated phenomena that occur in nature.1–4 Because of the complex and nonlinear interactions between different parts of the system, nonlinear evolution equations are frequently more difficult to solve than linear evolution equations. Furthermore, nonlinear wave equations provide several examples of new solutions that are greatly different from linear wave problems. Complex systems with nonlinear phenomena exhibit time-dependent behaviour that is described by nonlinear evolution equations. The use of these equations is very beneficial for MEMS as they are tiny devices that integrate mechanical components, sensors, actuators, and electronics on a small scale.5,6 The physical processes of heat and mass transfer include fluid flow over a variety of geometries; subject to the limitations can be reflected into the NLEEs.7–10 The NLEEs research has progressed gradually and significantly over many decades. Significant characteristics of these equations, which are used to represent the physical phenomena of the nonlinear wave occurrences such dispersion, dissipation, diffusion, response, and convection, are found in nonlinear science, mathematical physics, and engineering.11–14 Solutions to the NLEEs provide information on the variables that impacted the behaviour of these physical phenomena.
The solitary theory is strongly connected to current physics and is used to explain various physical issues at the frontier of this dynamic subject. The topic of solitary waves plays an important role in recognising the complicated happenings related to numerous technical domains, particularly in quantum mechanics, optical fibre communications, mechanical engineering, plasma physics, fluid mechanics, etc.15–18 When these concrete experiences are mathematically interpreted, the NLEEs arise. These physical occurrences can be better comprehended by looking at the specific remedies to these NLEEs. Over the last several years, a number of scholars have examined the dynamics of the solutions using a variety of effective and robust mathematical techniques that may reflect a wide range of physical events.19–22
In biophysics, it is evident that a number of characteristics of the energy and propagation nerve solitary waves, such as the reversible emission and reabsorption of heat and the corresponding mechanical, fluorescence, and turbidity changes, cannot be explained by the Hodgkin–Huxley model. The isothermal and isentropic compressive modulus’ substantial undershoot and stunning recovery are its most notable characteristics. These characteristics result in lowest soliton velocity and maximum wave amplitude that are close to the myelinated nerves’ propagating velocity. Solitary waves also spread without incurring shape and energy distortions. 23 The flow of nanomaterials based on hybrid nanofluids is of great interest to mechanical engineers. 24
In this paper, we provide a robust solver for several nonlinear evolution equations arising in applied science. Actually, this solver based on the subequation method (SEM),25,26 which used to search for solitary wave solutions. This method has been updated by the so famous exp-function method.27–29 This solver produces distinct forms of solitary wave solutions. The crucial technique that is suggested has several benefits, such as avoiding time-consuming and complex calculations and producing exact solutions using physical factors. It will be also used as a box solver or ready-made function to solve numerous equations and systems that arise in applied science. This solver is simple, reliable, and powerful. Indeed, this solver is extremely useful for engineers, physicists, and mathematicians in order to highlight certain intriguing occurrences in real-world issues. Finally, we implement the proposed solver in order to solve some physical models to validate the efficiency of this solver. Specifically, we consider the Phi-4 equation, 30 DMBBM equation,31–33 and the Drinfel’d–Sokolov–Wilson equation. 34
The organisation of this paper is as follows. Sec. 2 offers the description of the subequation method. Sec. 3 provides the structure of the proposed solver. Sec. 4 presents physical applications to validate the efficiency of the proposed solver. Sec. 5 investigates the interpretation of the presented results. We also present He’s frequency formulation for the proposed duffing equations. Finally, in Sec. 6, we offer some final thoughts before wrapping up our text.
Subequation method
In this section, we provide a condensed version of the sub-equation method.25,26
Consider the NLEEs for U(x, t) to be in the form




Substituting equation (2.3) together with equation (2.4) into equation (2.2), give a set of nonlinear algebraic equations by setting the coefficients of each power of ϕ(ζ) to zero. Solving these equations, one can determine the expression of equation (2.3). Thus, with the aid of (2.5), we get the desirable explicit solutions of equation (2.1).
Unified solver
We will examine the practical application of the idea of a unified solver in this section. Namely, we introduce this vital solver for the following equation



Taking equation (3.2) along with equation (3.3) into equation (3.1) gives

Solving these equations gives

Thus, the solutions of equation (3.1) are





Applications
In this part, we develop the robust solver for three physical models that emerge in natural science. The first model is the Phi-4 equation. 30 Numerous scientific sciences, such as nuclear physics and particle physics, are looking at this equation. The Phi-4 equation is a variation of the Klein–Gordon (KG) model that is associated with the nonlinear Schrödinger model. Numerous quantum phenomena, such as the capacity of matter waves the essential component of quantum mechanics to regulate actuality in the form of waves, may be studied using the solutions to this equation.
The second model is the nonlinear dispersive modified Benjamin–Bona (DMBBM) equation. This model was first proposed to represent surface long wave approximations in nonlinear dispersive environments. The DMBBM equation represents the balance between weak nonlinearity and dispersion in physical systems producing solitary waves. Additionally, it discusses the hydro magnetic waves in cold plasma, the acoustic gravity waves in compressible fluids, and the acoustic waves in inharmonic crystals.31–33
The third model is the Drinfel’d–Sokolov–Wilson (DSW) equation.34–36 Drinfel’d and Sokolov 37 and Wilson 38 proposed this model to describe dispersive water waves. Additionally, this equation has a significant role in fluid mechanics, engineering, and physics.
The Phi-4 equation is given as follows
30



Thus, the solutions of equation (4.1) are:





The DMBBM equation is given as follows
33



Integrating with respect to ξ and choosing constant of integration as zero, yield

Thus, the solutions of equation (4.9) are:





The Drinfel’d–Sokolov–Wilson (DSW) model is given as follows34–36




Integrating equation (4.20) with respect to ζ once and setting the constant of integration to zero, we have

Inserting equation (4.22) into equation (4.21), gives

Integrating this equation with respect to ξ one time, yields

Thus, the solutions of equation (4.18) are:










Results and discussion
We have presented a robust solver for several types of nonlinear evolution equations. The basic ingredient of this vital solver is the subequation method. In particular, we offered physicists, engineers, and mathematicians a box solver. The robust solver introduces hyperbolic, trigonometric, and rational form of solutions. Actually, these forms of solutions admit vital applications in applied sciences.
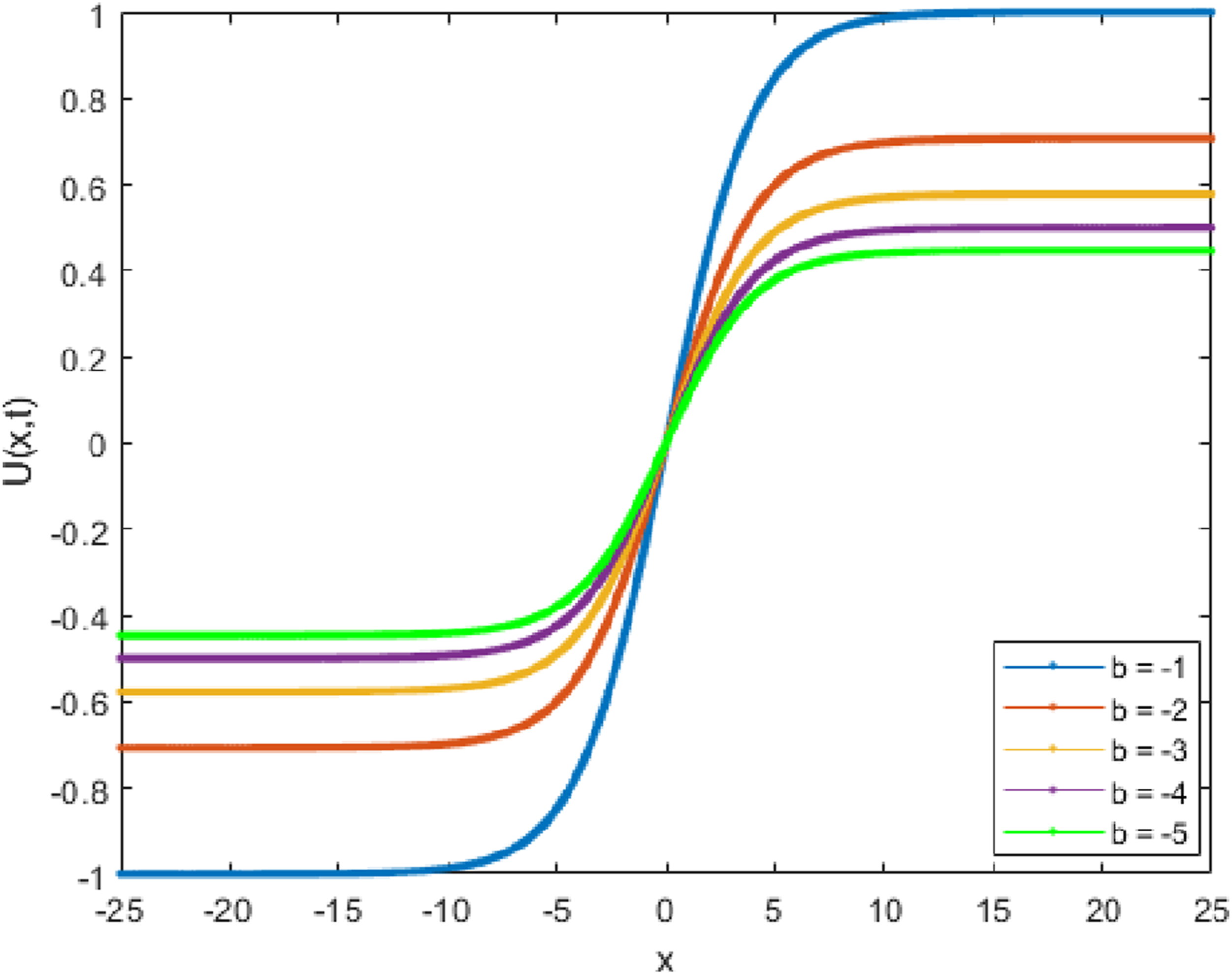
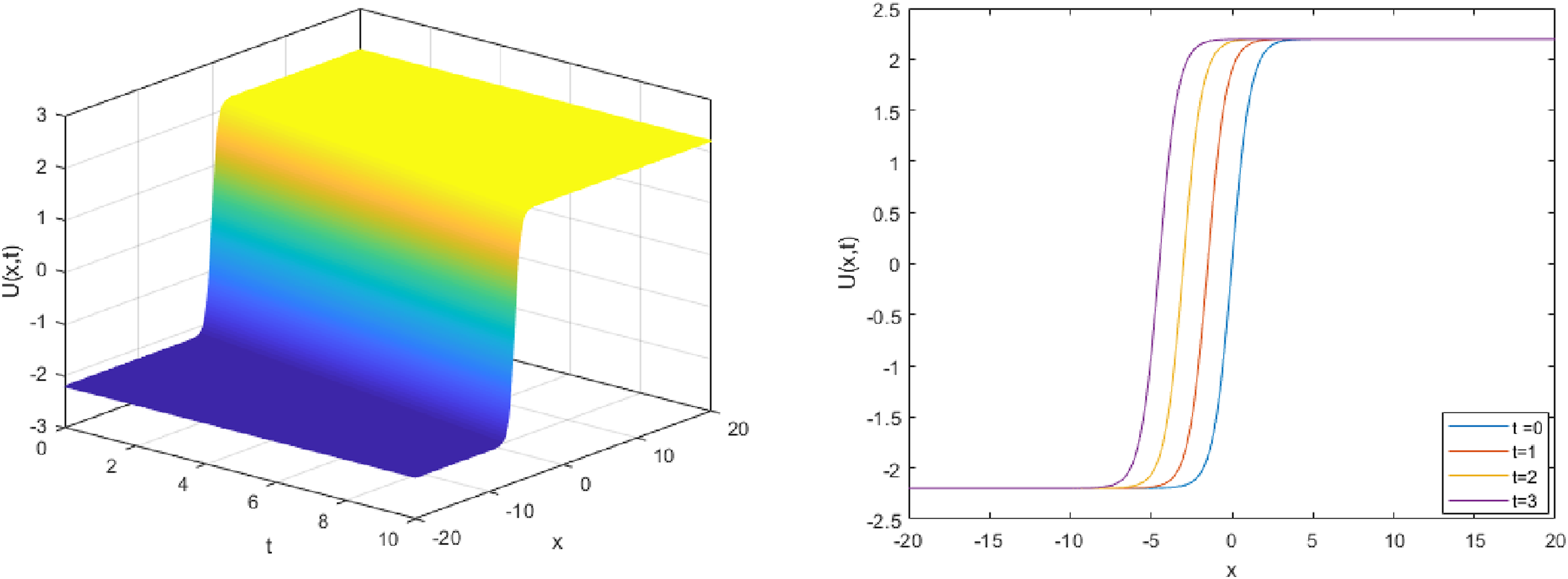
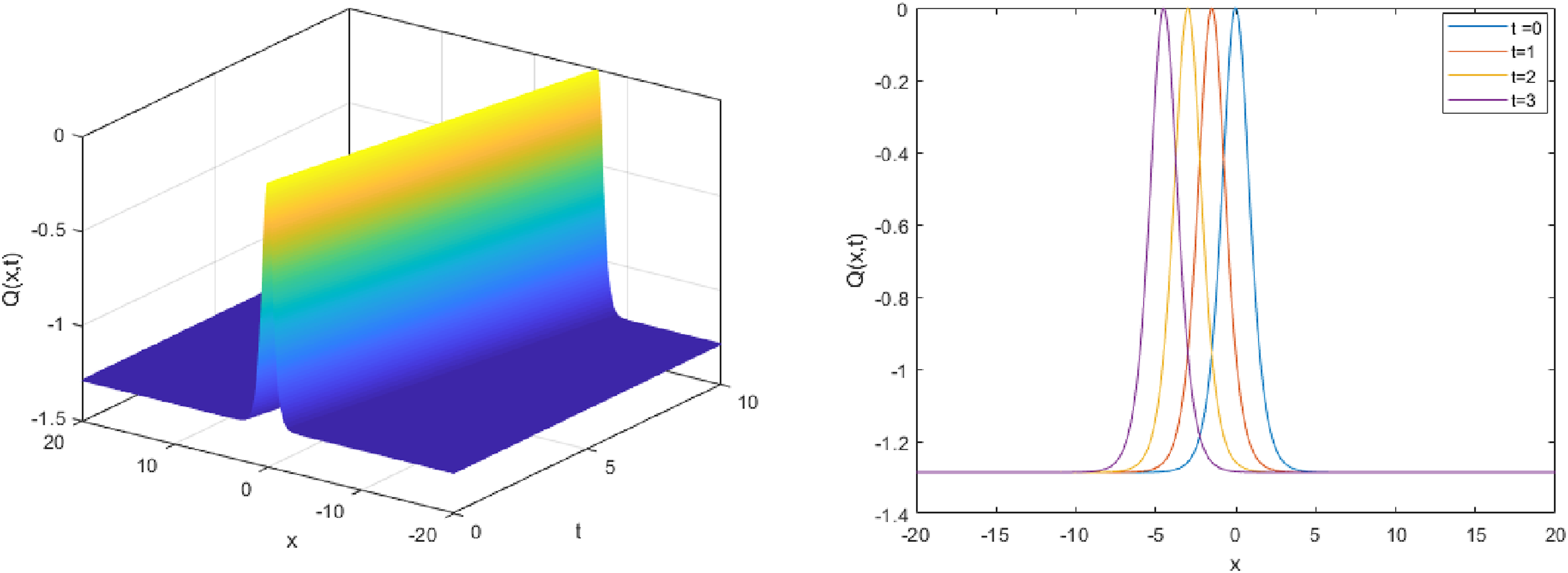
We implemented the robust solver to two physical models, namely the Phi-4 equation, DMBBM equation and the Drinfel’d–Sokolov–Wilson equation. We introduce vital solutions for these models. All solutions have been validated using the suggested solver. These solutions give wave pictures in applied sciences that describe complex phenomena. Figure 1 depicts the behaviour of the solution (4.4). These 2D and 3D figures represent the kink type solution. Figure 2 illustrates that decreasing b reduced the amplitude of the kink type solution wave of solution (4.4). Moreover, the wave direction does not change or reverse. Figure 3 depicts the behaviour of the solution (4.25). These 2D and 3D figures represent the kink type solution. Figure 4 depicts the behaviour of the solution (4.26). These 2D and 3D figures represent the soliton wave solution. The presented figures validate the results physically. 3D and 2D plots of the kink solution (4.4). 2D plots of the kink solution (4.4) for different values of b. 3D and 2D plots of the kink solution (4.25). 3D and 2D plots of the soliton wave solution (4.26).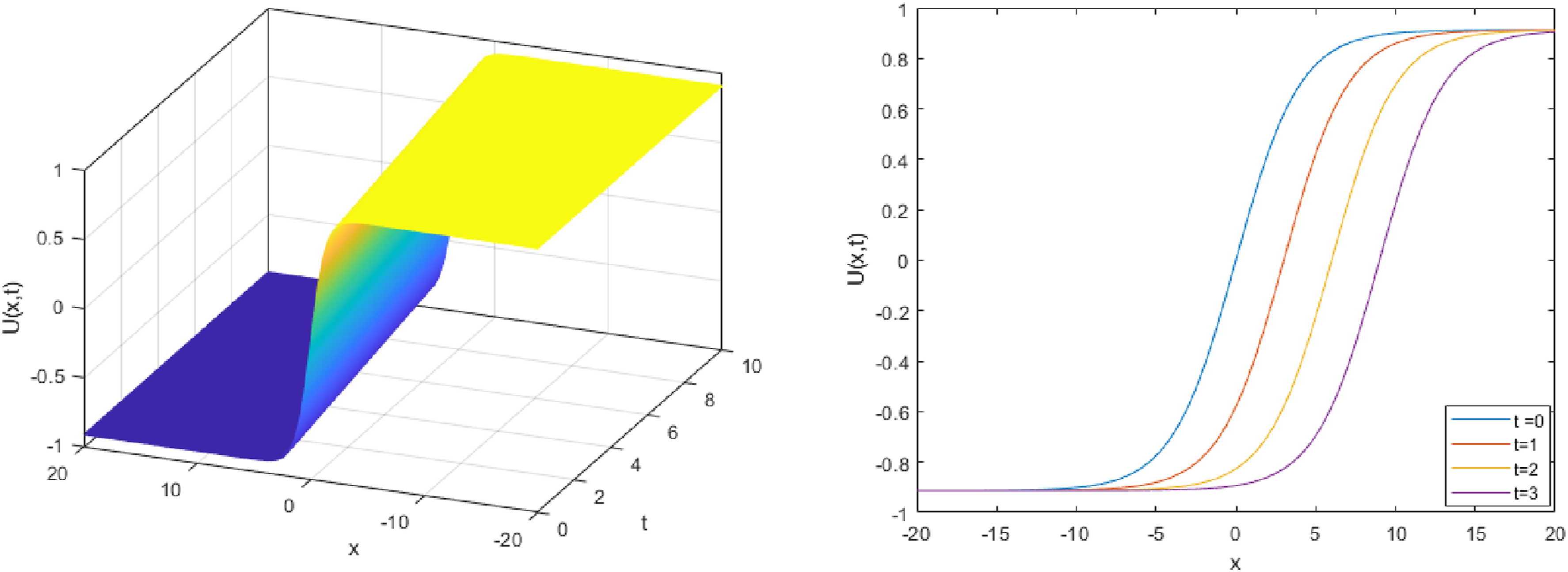
The results reveal that the offered solver is successful and can yield a significant number of wave solutions for NLEEs, which will be valuable in the study of the solitary theory in physics. It has further numerous advantages, including avoiding lengthy computations and allowing for direct analysis of scientific equations without requiring beginning or boundary conditions. Our motivation will demonstrate how this solver may be used to maintain several important phenomena in the energy field and solve numerous additional physical models. One of the primary aspects of this solver is its ability to handle a wide range of nonlinear fractional differential equations.39–41 To our knowledge, this strategy has yet to be used in any scientific investigation.
He’s frequency formulation
We noticed that the duffing oscillator equations (4.3), (4.12), and (4.24) take the general form of equation (3.1). For the sake of completeness of this paper, we introduce He’s frequency formulation. Equations (3.1) is equal to autonomous planar dynamical system

System (5.1) is a one-dimensional Hamiltonian system with a Hamiltonian function

The Hamiltonian function (5.2) is a conserved quantity as it does not directly depend on ζ, thus



Also He’s frequency formulation42–44 is accessible and extremely simple. Equation (5.5) can be written in the form of a nonlinear oscillator


Conclusions
In this study, we used subequation approach to generate the robust solver technique. This approach provided vital wave solutions for several types of nonlinear evolution equations. Namely, we introduced hyperbolic, trigonometric, and rational types of wave solutions. These solutions provide an explanation for a number of intricate and fascinating phenomena in several applied science fields. We applied the proposed solver to solve three nonlinear models, namely the Phi-4 equation, DMBBM equation and the Drinfel’d–Sokolov–Wilson model. The proposed technique is direct, reliable, and effective. Many scientists will implement the proposed solver approach as a box solver to solve various more sophisticated models that develop in the real world. This work gives a lot of motivation for future research in the growth of numerous disciplines of applied science.
Footnotes
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) received no financial support for the research, authorship, and/or publication of this article.