
Abstract
An accurate frequency of the Helmholtz–Duffing oscillator is obtained by a sophisticated modification of He’s frequency formulation. The pull-down instability existing in the symmetric breaking phenomenon is a newly discovered dynamic motion for oscillators with even nonlinearities. A criterion for predicting the asymmetrical amplitude motion and the pull-down instability is built by measuring the amplitude change. The good matching performance between the analytic results and numerical ones indicates that the criterion offers a starting point for future research into the pull-down phenomenon, and opens a new path for studying more complex nonlinear oscillators with even nonlinearities.
Keywords
Introduction
Recently scientists worldwide have intensified efforts to insight into some striking oscillation phenomena arising in even nonlinearities, especially the pull-down instability,1,2 which offers striking benefits in designing shallow arches, ship rolls, and electrical circuits to improve operation reliability and extend the lifetime of a nonlinear vibration system, but much work is still needed to investigate its main factors affecting the pull-down instability.
Nonlinear vibration with an implicit quadratic term also arises in a micro-electromechanical system (MEMS), and the pull-in instability and the asymmetry behavior are the main factors affecting its operation reliability.3,4 Over the past decades, many scientists have been working on various analytical approaches for studying the asymmetry oscillation phenomenon and pull-in motion of MEMS. For example, Tian and her colleagues established a new MEMS model in a fractal space and studied its pull-in instability.5–7 Chun-Hui He 8 proposed a variational principle for a fractal MEMS system. Ji-Huan He and his students presented a method to fast identification of the pull-in voltage 9 and suggested a new concept of the pull-in platform. 10 Yang 11 studied the pseudo-pull-in stability of the MEMS system. The variational iteration method offers an unprecedented tool to dynamical analysis of the MEMS systems.12–16
Some symmetry-breaking behaviors hide the pull-in instability, while others may have the pull-down instability. The pull-down instability is a newly found dynamic motion for even nonlinear oscillators, which is proposed by professor He and his students. 1 Generally, the displacement of vibration motion varies periodically from A to -A. The quadratic force of the oscillator pulls down the system in each cycle. The amplitude changes from A to -A-ΔA, where ΔA is the increment of the amplitude when the displacement u < 0. The quadratic nonlinear oscillator has the asymmetric amplitude in each cycle. When the quadratic force is small, a periodic motion is predicted; however, when it increases to a threshold value, the kinetic energy will be gradually consumed, and finally the periodic motion is forbidden. Then the pull-down instability occurs. This asymmetric oscillation phenomenon and pull-down motion are both amusing and challenging, while the lack of theoretical research to predict the pull-down dynamic time greatly reduces operational reliability.
It was discovered that many vibration systems in engineering applications have even nonlinearities, the Helmholtz–Duffing oscillator is a good example. Elías proposed an analytical solution of the damped Helmholtz–Duffing equation. 17 El-Dib studied the properties of complex Helmholtz–Duffing oscillator arising in the fluid mechanics.18,19 More recently, there are many analytical and numerical methods to find an approximate solution of a nonlinear oscillator, such as the variational iteration method,20–22 the homotopy perturbation,23–26 the Hamiltonian approach,27–29 Adomian decomposition method, 30 and others.31,32 However, the previous research focused on searching for its approximate solution, and the pull-down instability and asymmetric period have not yet studied in literature.
In this paper, we use the homotopy perturbation method and He’s frequency formulation to seek an approximate frequency of the Helmholtz–Duffing oscillator. The criterion for prediction of the pull-down motion is obtained and verified by different parameter values. The study on the pull-down instability will help us to understand the deep reason leading to the symmetry breaking in nature.
Approximate frequency formula
There are many experimental and numerical investigations for this type of oscillator with a quadratic nonlinear term. The Helmholtz–Duffing oscillator contains plenty of significant properties and occurs in many physical areas.
Consider the oscillator in the form

It is a second-order differential equation with both odd and even nonlinear terms. Equation (1) can be studied by the homotopy perturbation method, which is a useful tool for solving a wide class of nonlinear problems. It is more effective in nonlinear problems with the forced term 33 but it can also be applied to the problems without forced term. There are many modified ones in literature, especially Li-He modified homotopy perturbation method. 4 It not only gives an alternative approximate solution to the oscillating system but also makes the solving process more accurate and simpler.
The homotopy equation of equation (1) is in the form

In view of the homotopy perturbation method, the solution of equation (2) is expanded in a series of ε

The coefficient

Substituting equations (3) and (4) into equation (2), and then according to some simplifications and rearrangements depending on powers of ε-terms, we can obtain


The solution of equation (5) is

Substituting

An approximate frequency of equation (1) is

Generally one iteration is enough to obtain a high accuracy approximate solution, while equation (9) is only valid for nonlinear oscillators with odd nonlinearities. In equation (1), there are two nonlinear terms, which might have different effects on the solution. So we should use an alternative method to find more precise frequency solution, and we solicit He’s frequency formulation35,36 for this purpose.
Equation (1) has the following form

As

There are many applications and modifications of He’s frequency formulation, see Refs.37–43 The approximate frequency of equation (10) can be obtained as follows35,36

The asymmetric nonlinear equation often has even nonlinearity and appears unsymmetrical oscillation phenomenon, so it can be separated into two auxiliary equations applicable in positive and negative directions. Equation (1) has a quadratic nonlinear term and can be rewritten as follows
1


Using the frequency formula of equation (12) for equations (13) and (14), we get


So the solution can be approximately expressed as

The frequency formula of equation (1) can be calculated as

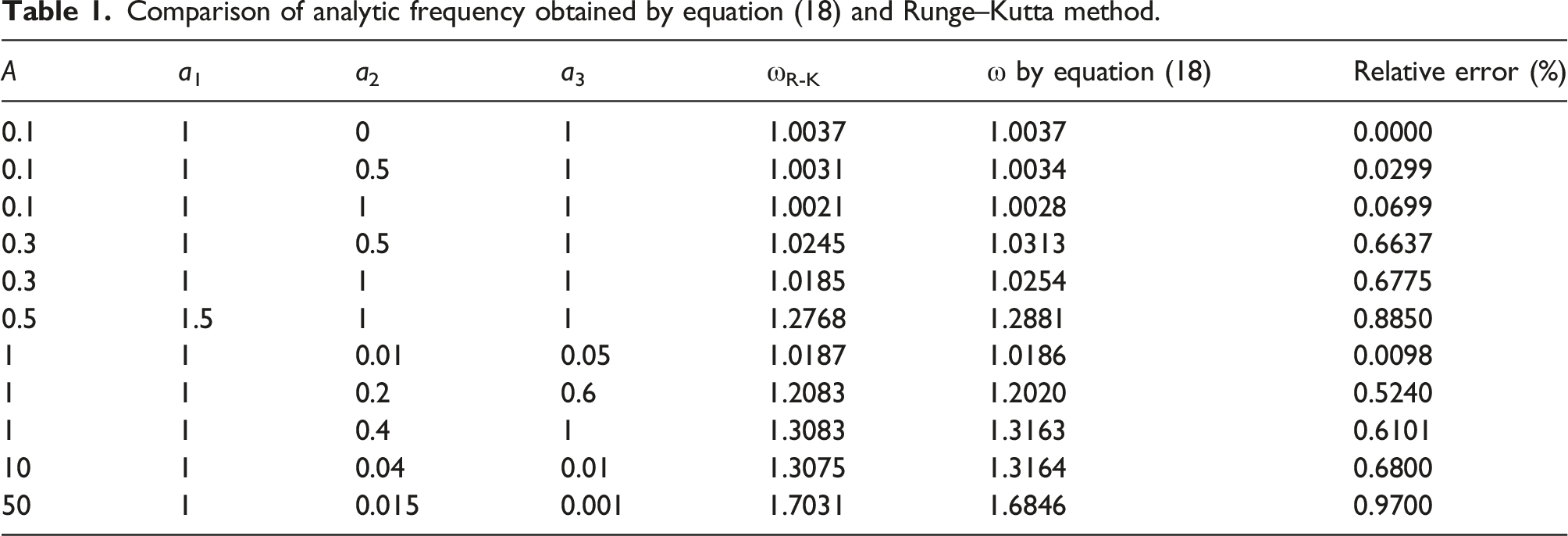
Comparison of analytic frequency obtained by equation (18) and Runge–Kutta method.
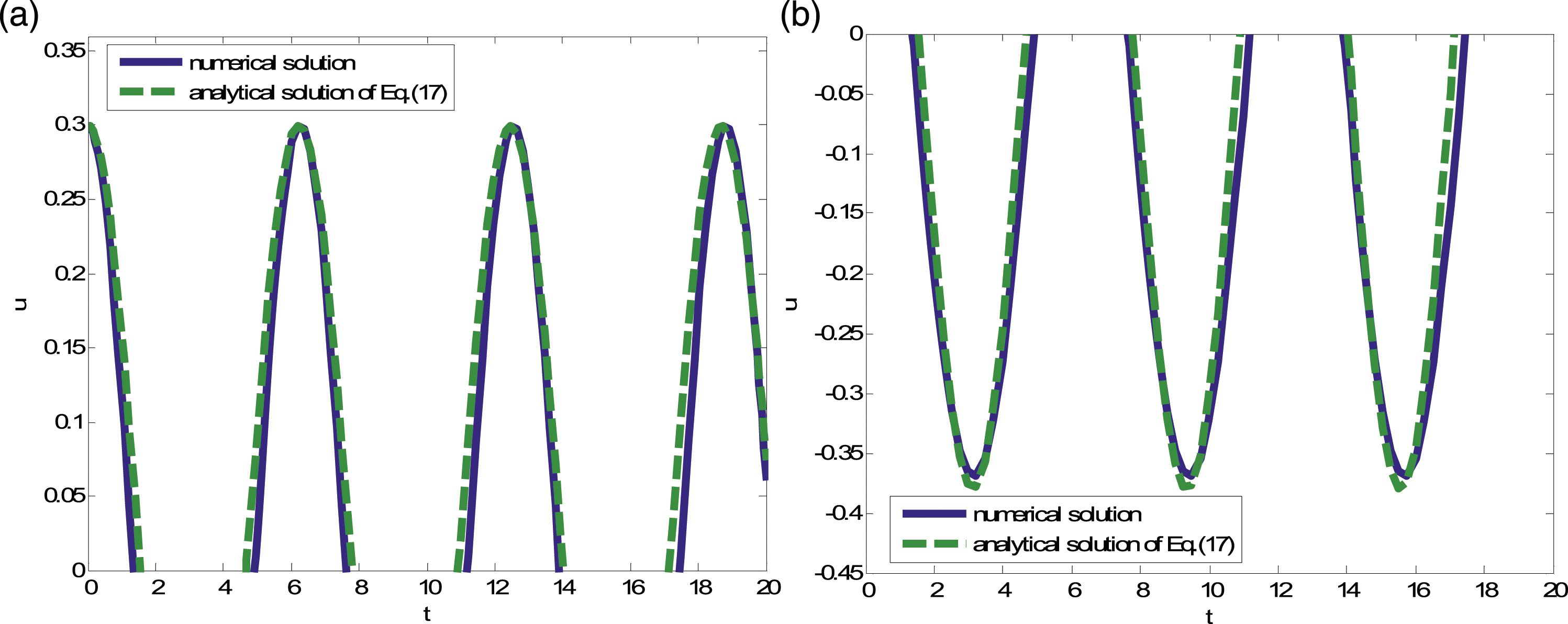
We attempt to select Comparison of solutions for the parameters a1 = 1, a2 = 0.5, a3 = 1, and A = 0.1. Comparison of solutions for the parameters a1 = 1, a2 = 1, a3 = 1, and A = 0.3. (a) u > 0; (b) u < 0.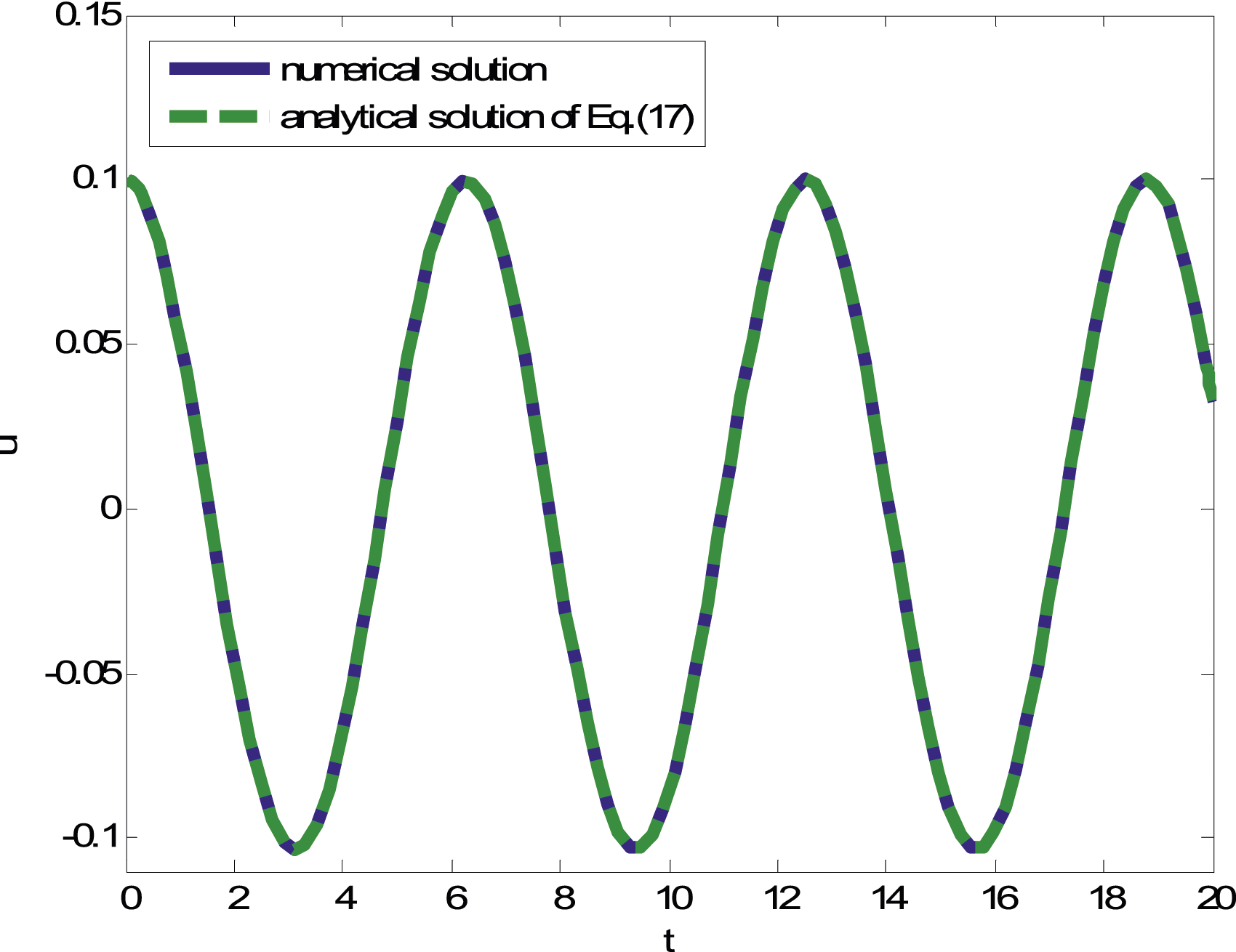
Equation (12) is a new method for calculating the frequency of oscillators with even nonlinearities and it is validated by numerical simulations, which show that it may accurately predict the asymmetrical amplitude motion. This method would be affected by noise or other perturbations. In order to elucidate the basic idea of the method, we consider the following oscillatory problem with a forced term
We write equation (19) in the form
Ref.
25
proposed an enhanced homotopy perturbation method that is to apply the annihilator operators 
Due to no forced term involved in equation (21) with suitable choice of
Dynamic motion
Due to the asymmetry of the Helmholtz–Duffing oscillator, the system may exhibit much more complicated dynamical behaviors, for example, a periodic motion is predicted when a2A is small, while a pseudo-periodic motion or a pull-down motion might occur when a2A is large. The pull-down property of a nonlinear oscillator was first proposed by Professor He and his students, 1 who proposed a concept of the pull-down breakout for nonlinear oscillators with even nonlinearities, and it will become a powerful research tool in nonlinear vibration theory. As the quadratic nonlinear term causes the pull-down motion and a2 is the coefficient of the even nonlinear term, we will search for the relationship between a2 and other parameters when pull-down occurs.
equation (1) is an integrable equation. By multiplying u′ on both sides of the equation, we can quickly obtain
By the conditions umax = A and umin = -B, equation (22) becomes
Using the transform B = kA, equation (23) is given by


Its remainder term should satisfy the following condition

We consider the conditions umax = A and umin = -B, the combined displacement is |umax + umin| = |A-B|. equation (1) exists periodic motion when |A-B|
To verify the efficiency of using the above-mentioned criterion, we consider various values of parameters a1, a3, and A, and the results will be explained in detail below.
Let a1 = 1, a3 = 1, and A = 0.1, it can be determined that a2 = 5.125 by equation (28). As shown in Figure 3(a), when a2 is relatively small, periodic motion occurs, and as a2 increases, it changes from periodic motion to pseudo-periodic motion. When a2 = 5.125, a pull-down instability occurs after one and a half cycles, and the amplitude suddenly increases sharply. Substituting a2 = 5.125 into equation (25) yields k = −1, 2, 2.06, 65.25. Due to k > 0, negative values are rounded off and B = 0.2, 0.206, 6.525. These three key values are consistent with Figure 3(b). Starting from t = 0, after half a period T, the solution u(t) changes from u(0) = 0.1 to u(0 + T/2) = –0.2, then followed by one period where u becomes −0.206, and finally after half a cycle, u decreases to −6.525. When a2>5.125, the pull-down instability occurs after a half cycle, which is shown in Figure 3(c). The dynamical phenomena of equation (1) when a1 = 1, a3 = 1, and A = 0.1. (a) Phase diagram; (b) pseudo-periodic motion with a2 = 5.125 and (c) time history for different value of a2.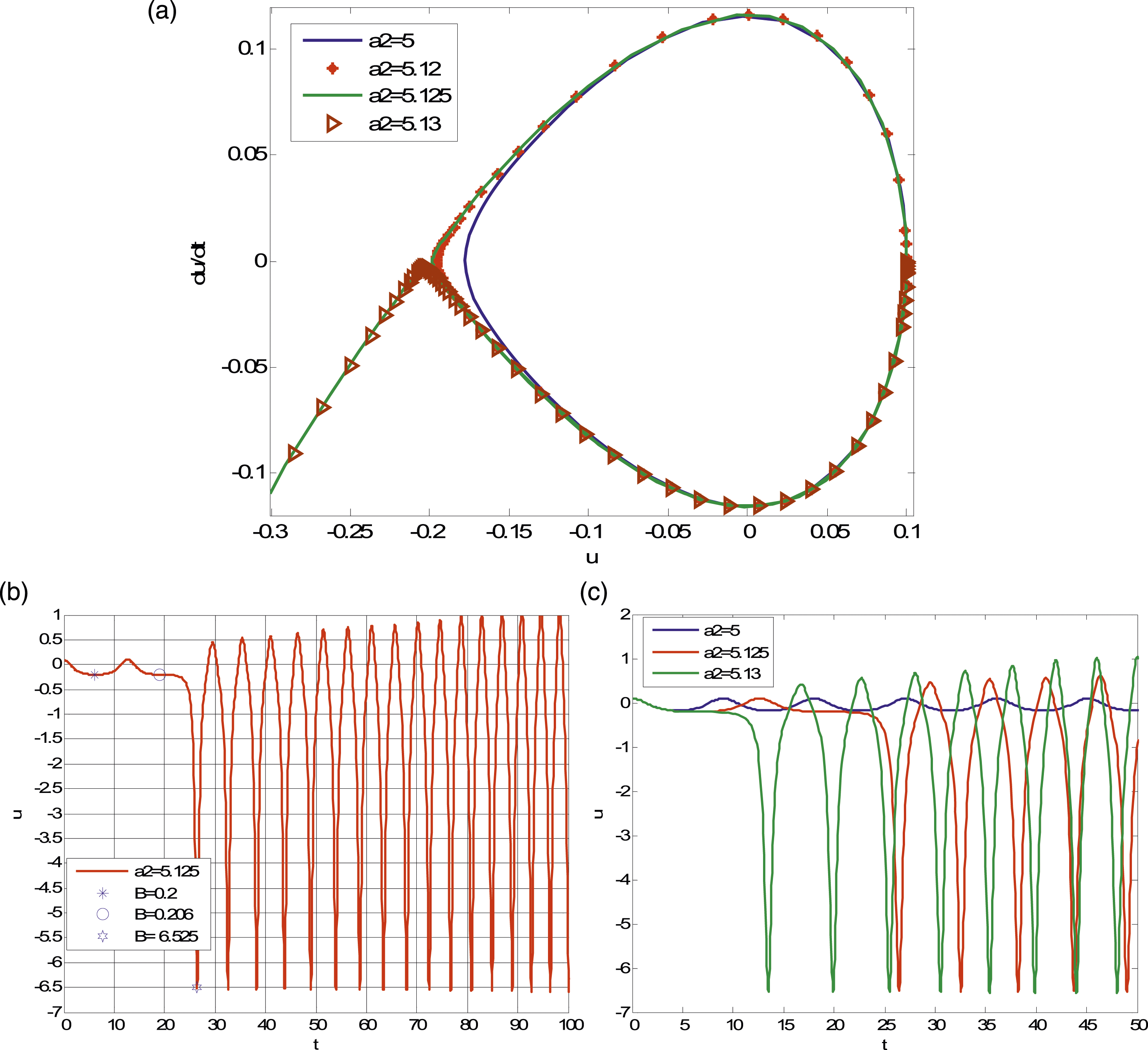
Let a1 = 1, a3 = 0.5, and A = 0.3, it can be determined that a2 = 1.8542 by equation (28). Substituting a2 = 1.8542 into equation (25) yields k = 2, 2.34, 13.04 and B = 0.6, 0.702, 3.942. The results are shown in Figure 4. From these figures, it can be seen that as a2 increases, the period increases and the frequency decreases. However, once a pull-down motion occurs, the period decreases while a2 increases. The dynamical phenomena of equation (1) when a1 = 1, a3 = 0.5, and A = 0.3. (a) Pseudo-periodic motion with a2 = 1.8542 and (b) time history for different value of a2.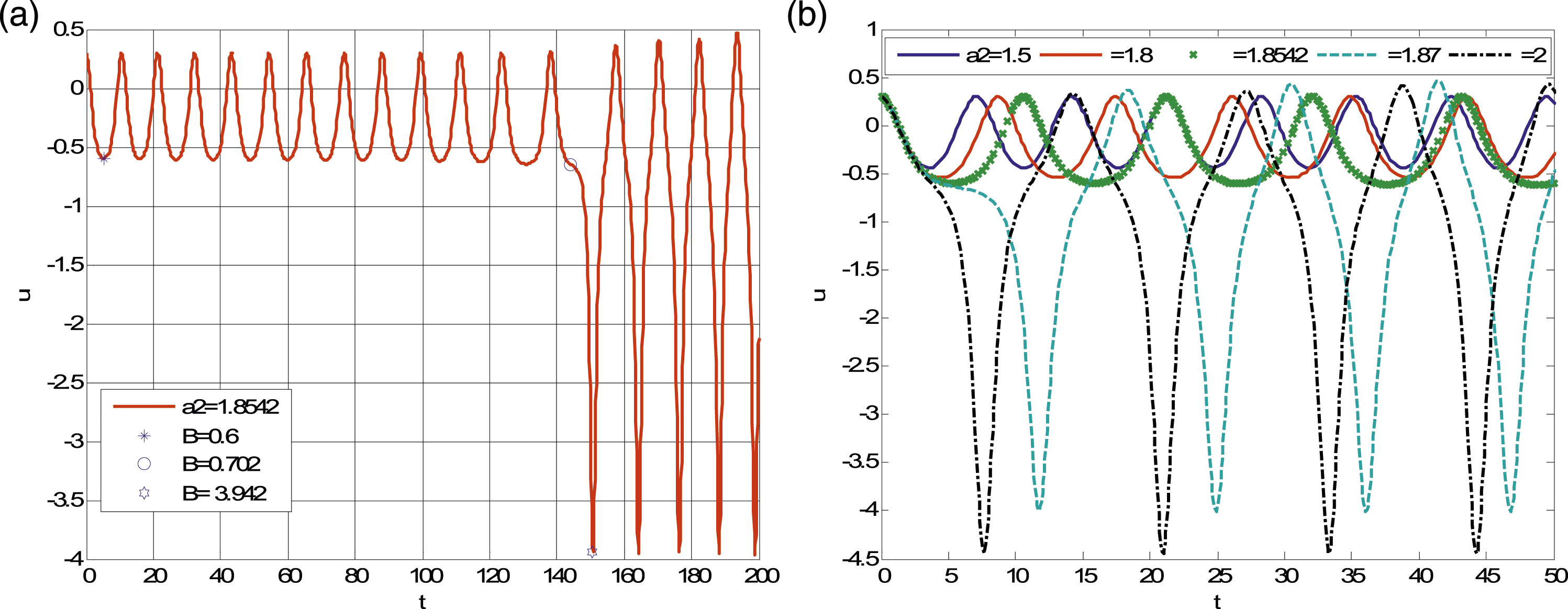
We provide another set of values, such as a1 = 1, a3 = 0.5, and A = 1, the value of a2 can be easily found by equation (28). The solution is a2 = 1.125. After substituting the parameter values into equation (26), it was found that the quadratic equation has no real root. The system does not have a quasi-periodic or pull-down motion. Figure 5 presents the asymmetric motion with respect to different values of parameter a2. The dynamical phenomena of equation (1) when a1 = 1, a3 = 0.5, and A = 1.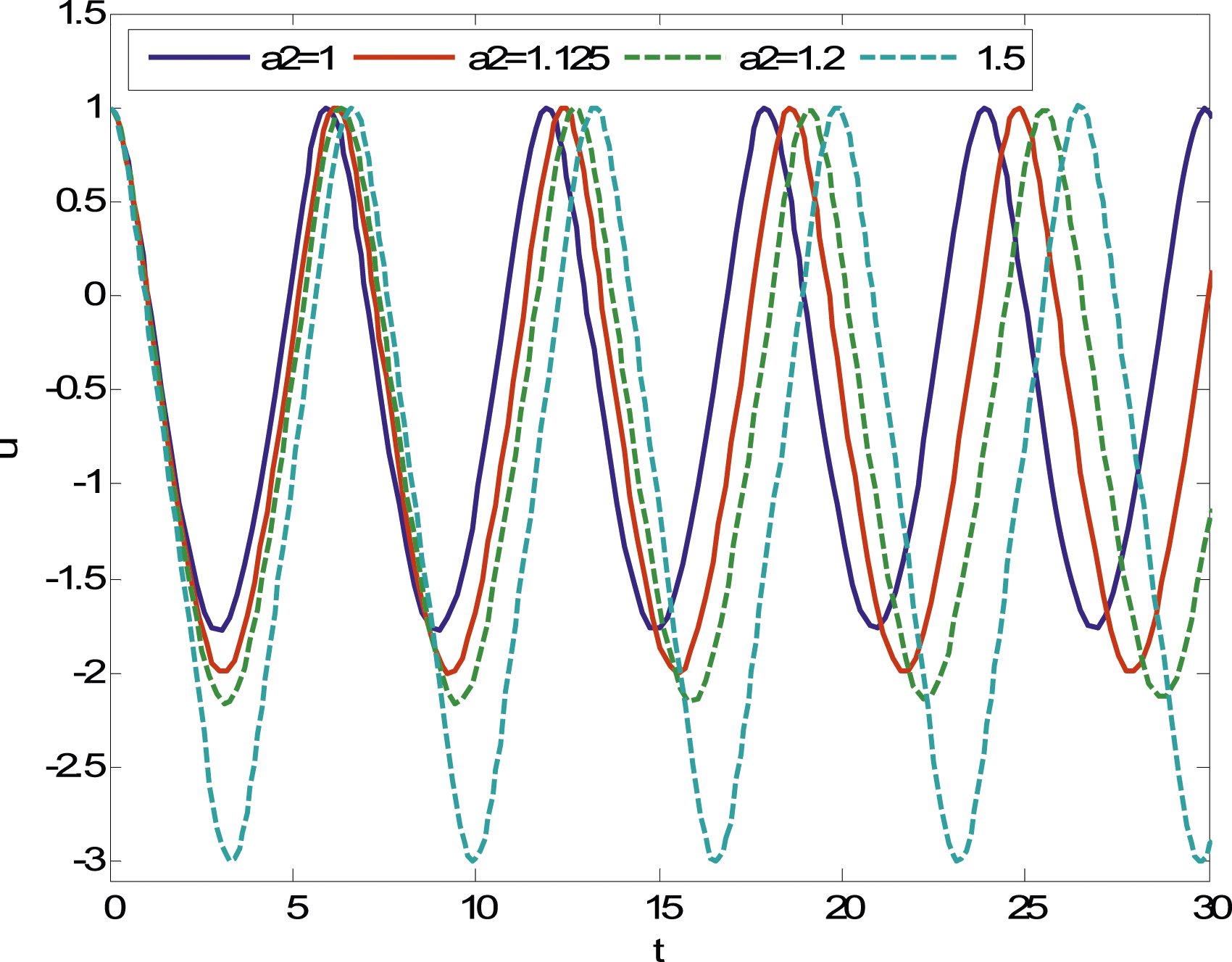
Conclusion
This work aims to introduce a new effective method for fast identification of the pull-down dynamic motion. A high-precision approximate frequency of the Helmholtz–Duffing oscillator has been obtained through a sophisticated modification. A pull-down breakout for this nonlinear oscillator with even nonlinearities has been studied, and a criterion for predicting the asymmetrical amplitude motion and the pull-down instability is built by the amplitude change. The criterion has been verified numerically and it can be simply extended to nonlinear vibration oscillators with higher-order nonlinearity. This method opens up a new path to restrain the pull-down instability of nonlinear oscillator systems and control the occurrence time of the pull-down phenomenon, and can even better explain practical problems such as ship capsizing, large-scale structural damage, and the power system collapse.
Footnotes
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) received no financial support for the research, authorship, and/or publication of this article.