
Abstract
The current paper investigates the nonlinear dynamics of an excited pendulum by a crank-shaft-slider mechanism (CSSM), in which it is restricted to move vertically. He’s method of homotopy is employed to obtain the analytical solution of the governing differential equation. The numerical solution of this equation is obtained using the fourth-order Runge-Kutta method (RKM). The comparison between both solutions demonstrates a high level of consistency, which confirms the precision of the gained analytic solution. The graphical representations of these solutions are presented to reveal the influence of various parameters on the investigated motion.
Introduction
Prototypes of pendulums are highly useful e.g.1,2 for investigational justifications in real-world engineering. Engineers also do great efforts to comprehend the mechanics of gravity, centripetal force, and inertia. The oscillatory movement of a pendulum has become one of the most examined movements in applied physics and engineering. The exact solution for a lot of systems seems to be highly complicated and, at times, unreachable3,4 As a result, asymptotic solutions have piqued the interest of several scientists to handle a variety of nonlinear equations, like the approaches of Lindstedt-Poincaré (LP) and multiple scales (MS) 5 have numerous benefits when it comes to obtaining vibratory system solutions.6–8
Also, there was the homotopy perturbation method (HPM), which dates to Ji-Huan He 9 and is not dependent on a minor parameter, unlike LP and MS methods. In, 10 the authors investigated the dynamical motion of a pendulum connected to a rigid rotating frame that rotates about the vertical axis. The stability has been studied, in addition to emphasizing the accuracy of the solutions by HPM. In, 11 the HPM is applied to obtain the analytic approximate solution of the governing equations. The solutions were estimated in a series form. Clearly, these solutions and their behaviors depend upon the initial conditions. In, 12 time-delayed velocity and position were considered for the investigation of an excited oscillator of Van der Pol-Duffing. The HPM and its modification were utilized to deduce an approximate solution for the studied system. It was concluded that the modification of HPM produces better results. The authors followed their studies to examine the movement of a basic pendulum that is attached to a wheel and a thin spring in. 13 The HPM and Laplace transforms were combined with an extended frequency to produce a regular approximate solution. Moreover, the fourth-order RKM was used to confirm the gained solution. The analytical solution for the motion of a magnetic spherical pendulum was achieved in 14 using Laplace transforms and HPM. The authors used the procedure of linearized stability to investigate stability around the fixed points. In, 15 the authors used the HPM to locate precise solutions for different forms in linear and nonlinear differential equations (DEs), while in 16 a sliding bead problem in a smooth parabola was examined using the same approach to obtain the desired solution.
The MS is absorbed in 17 to provide a modification of the HPM. Particularly for nonlinear oscillators, this adjustment is effective. The obtained solution was developed in accordance with a periodic structure for its amplitude. In, 18 the author looked at the behavior of a cubic nonlinear Duffing’s equation with time delay. To overcome the difficulty of this problem, a combination between MS and HPM was used. Two solvability criteria of nonlinear first-order DEs were achieved, one is cubic and the other is a quantic in slow and slower variables, respectively. The periodic solution of Mathieu equation time delay using HPM a version of timescales was examined in. 19 Periodic structure is generated for zero-order amplitude, in which three-time scales are taken into account along with the stability analysis. For both harmonic and non-harmonic resonance cases, the approximate periodic solutions were determined to the second perturbations’ precision.
In 20 a power series solution is obtained for time less than a quarter of the period. The non-perturbative approach backs to El-Dib21,22 to gain the simplest solution to different problems. For example, to obtain the solutions, of non-conservative Gaylord’s oscillator. The idea of this approach depends on obtaining an analogous linear system, in which it has the benefit of having coefficients that are simple to compute and that consider the impact of the original nonlinear factors. Even with periodic pressures present, this linearization procedure yields nearly precise results. Therefore, it is simple to demonstrate the correlations between frequencies and amplitudes. It must be noted that the correlation between the frequency and amplitude of the mentioned model in 21 was calculated using the Bessel function. Comparison between the analytical results and the numerical ones; exhibits good approbation and validates the accuracy of the analytical results.
In, 23 the He-Laplace method is used to deduce the solutions of the oscillating system whereas it is solved with help of the variational iteration method with Laplace transformations in. 24 Authors 25 used a modification of HPM to get the analytical solution of some nonlinear oscillators. The HPM is applied to get amplitude-frequency relationship of the studied oscillator 26 used to produce nanofibers. In, 27 HPM is used to have the approximate solution of nonlinear oscillators. The energy approach is combined with Li-HPM 28 to get the approximate solution of the variating system. In the study, 29 the investigated system is solved by using the Li-He’s technique. The Hamilton principle establishes a governing equation for string axial vibrations with temporal and spatial damping forces. 30 The fractal duffing oscillators31–33 are solved with helping fractal derivatives, and HPM.
The literature has extensively investigated the classical parametrically excited pendulum, and the harmonic excitation of the pendulum confirmed may cause distinct types of a simple pendulum motion. This work focuses on a new version of the kinetics of a vertically excited parametric pendulum by a CSSM. In the mathematical model created for this paper, the CSSM is examined as an extension of the standard parametric pendulum given in.34–37 The HPM is used in this work to find an asymptotic solution to the equation that governs motion. The numerical solution of the original equation is obtained by using the fourth-order RKM. When comparing the two solutions, it is clear that there is a great degree of consistency between them, which supports the accuracy of the acquired analytical solution. To demonstrate the impact of different factors on the motion under investigation, graphical representations of these solutions are provided.
Description of the problem
The goal of the current section is to obtain the equation of motion (EOM) of an excited pendulum. It is assumed that its suspension point moves vertically on the support by the CSSM, see Figure 1. The mechanism under consideration here is a rigid weightless rod of length The dynamical model.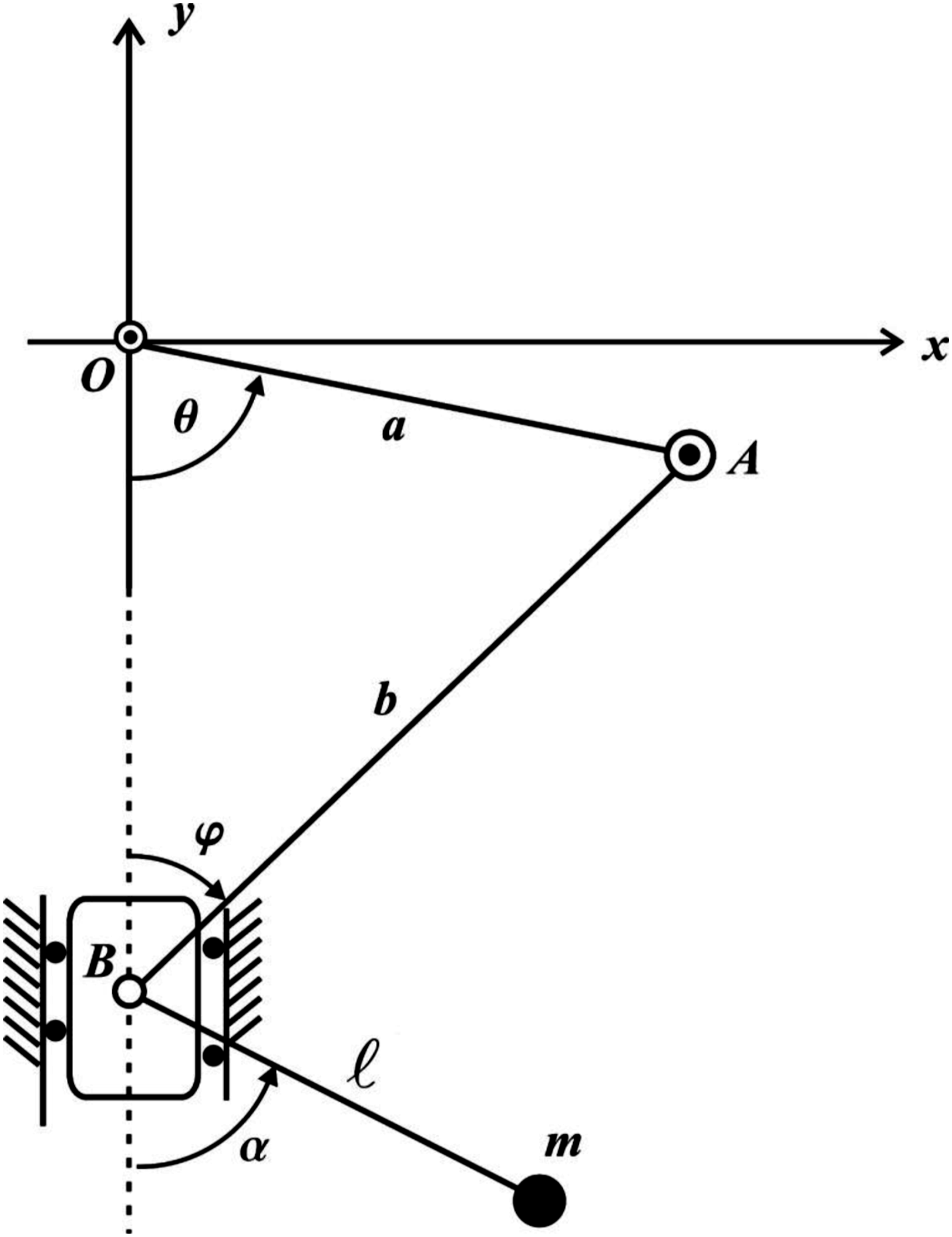
Let

Making use of the trigonometric relationship between

From 1 and 2, one can write the first derivative with respect to time
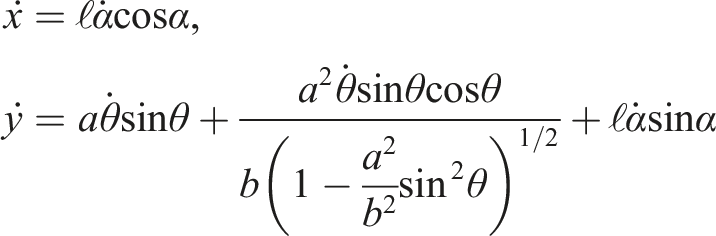
Therefore, one can write

Introducing a dimensionless variable

Substituting equation 4 into equation 3 it is easy to write:

The kinetic energy

Lagrange’s equation of the examined conservative system has the form

Hence, the EOM may be reduced to


Referring to the above, the EOM in 8 can be rewritten as follows

Method of solution
This section’s purpose is to use the HPM to find the EOM’s asymptotic approximate solution. To realize this aim, Taylor’s series can be used to approximate

Making use of 10 and 11 to get


Assuming that
Considering the following initial conditions of equation 12 as below

According to the procedure of HPM, one can write



The substitution of 16, 17 into 15 yields

At


Order of

Order of

Order of

If the following criteria are met, then the prior Equations 21–23 can be solved




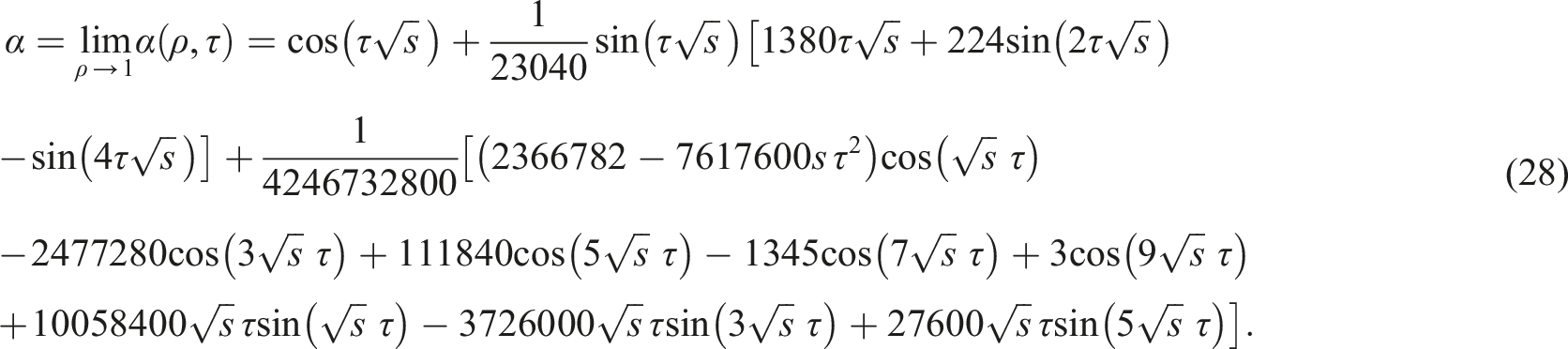
Substituting (26)–(28) into (22) to obtain the required solution which is consistent with the HPM
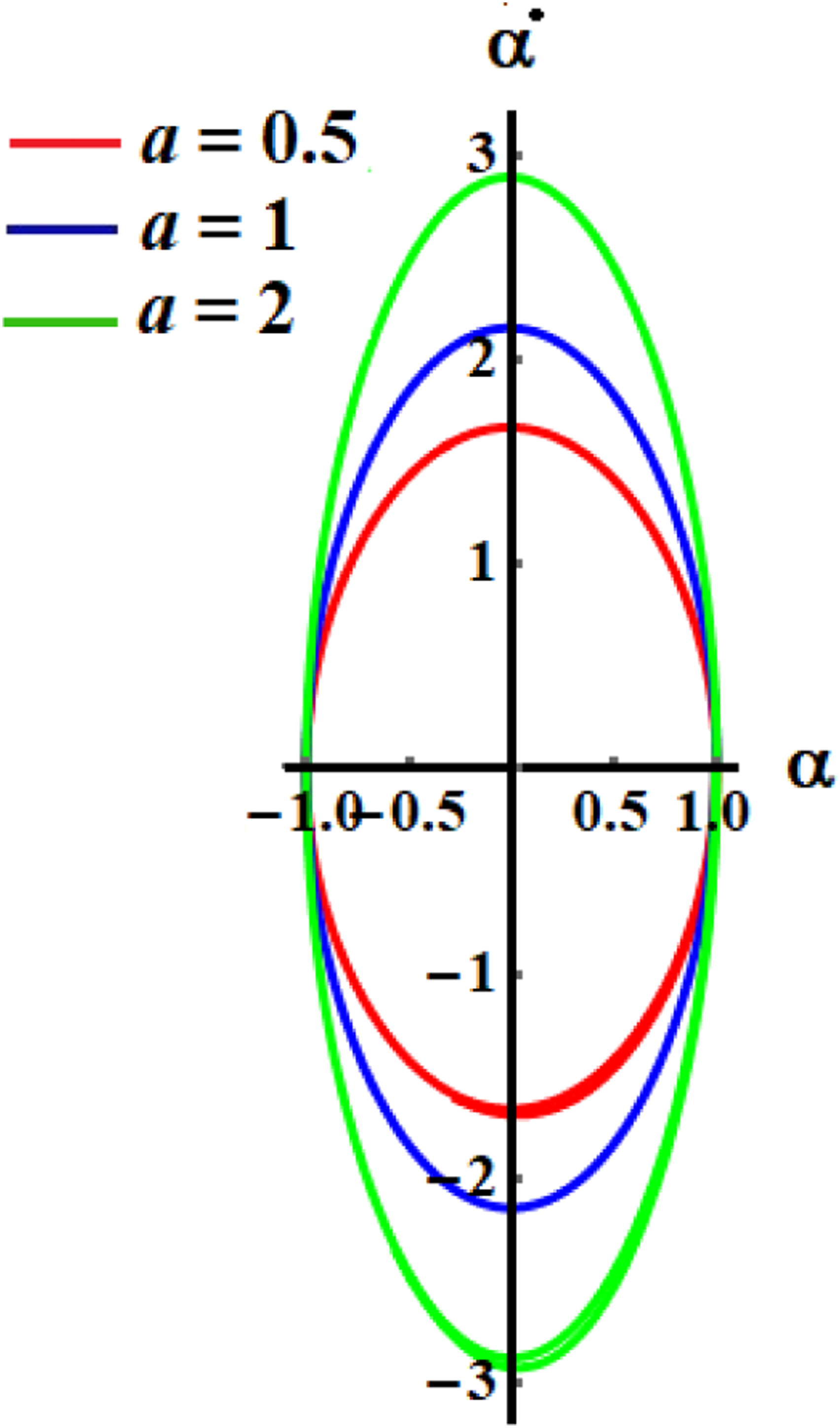
The drawn curves of Figure 2 are calculated when Represents the homotopy Analytic solution at Represents the curves of phases in the plane 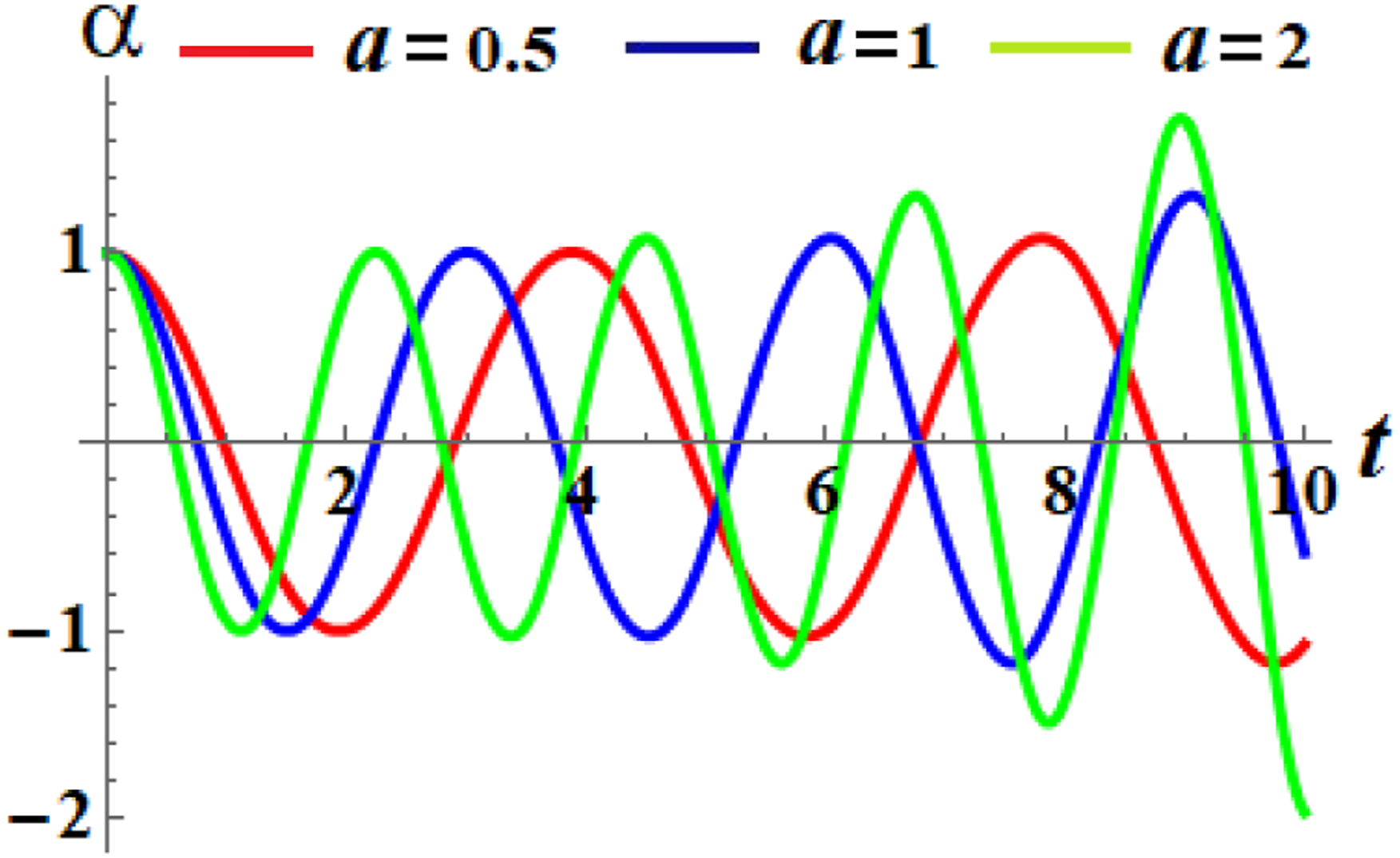
Discussion and Results
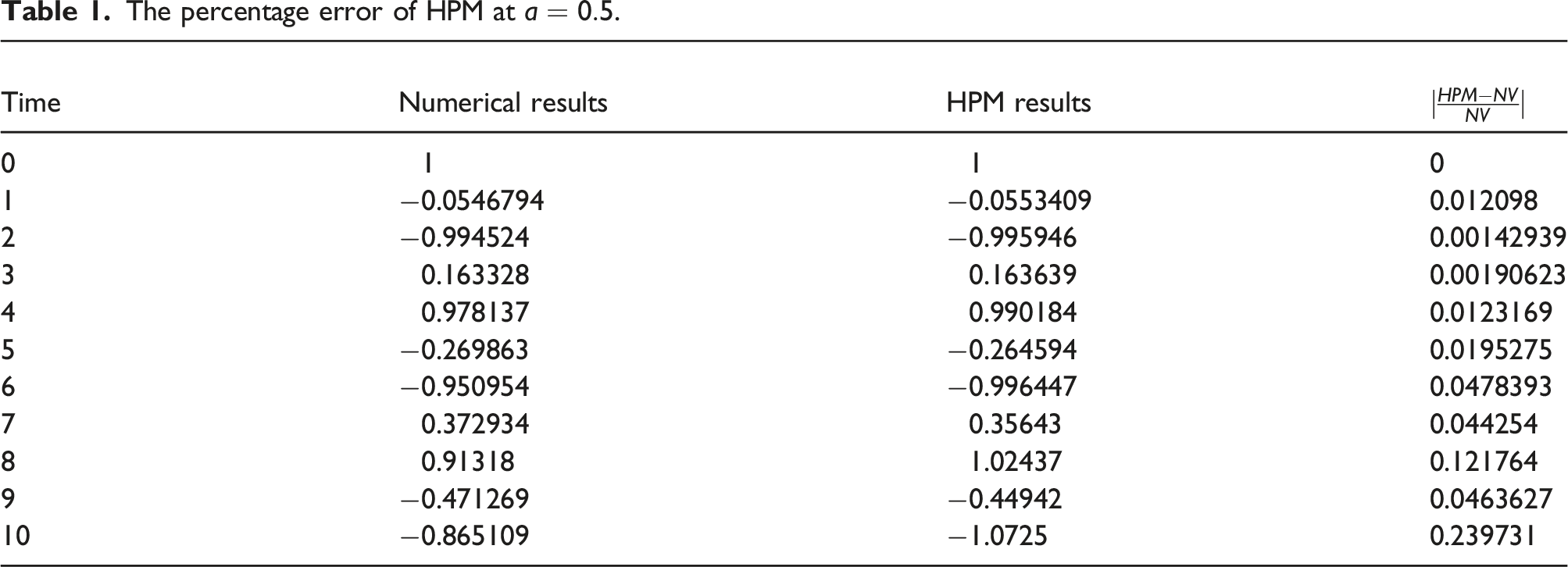
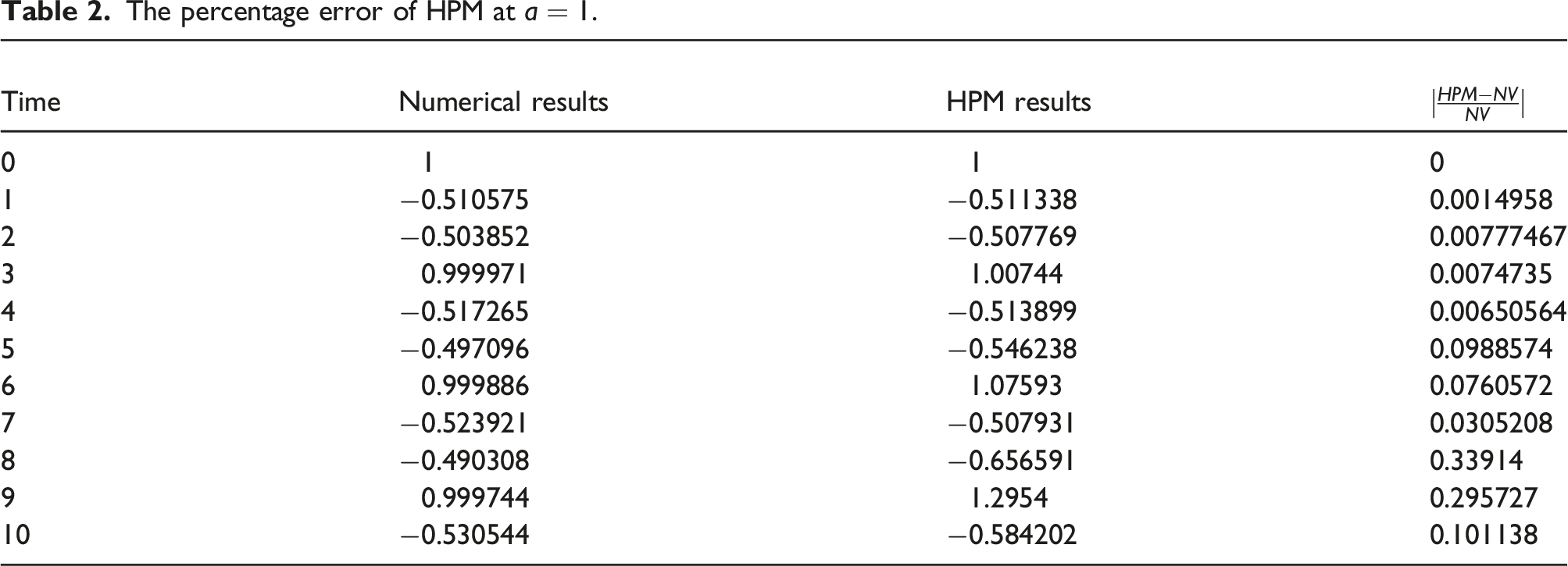
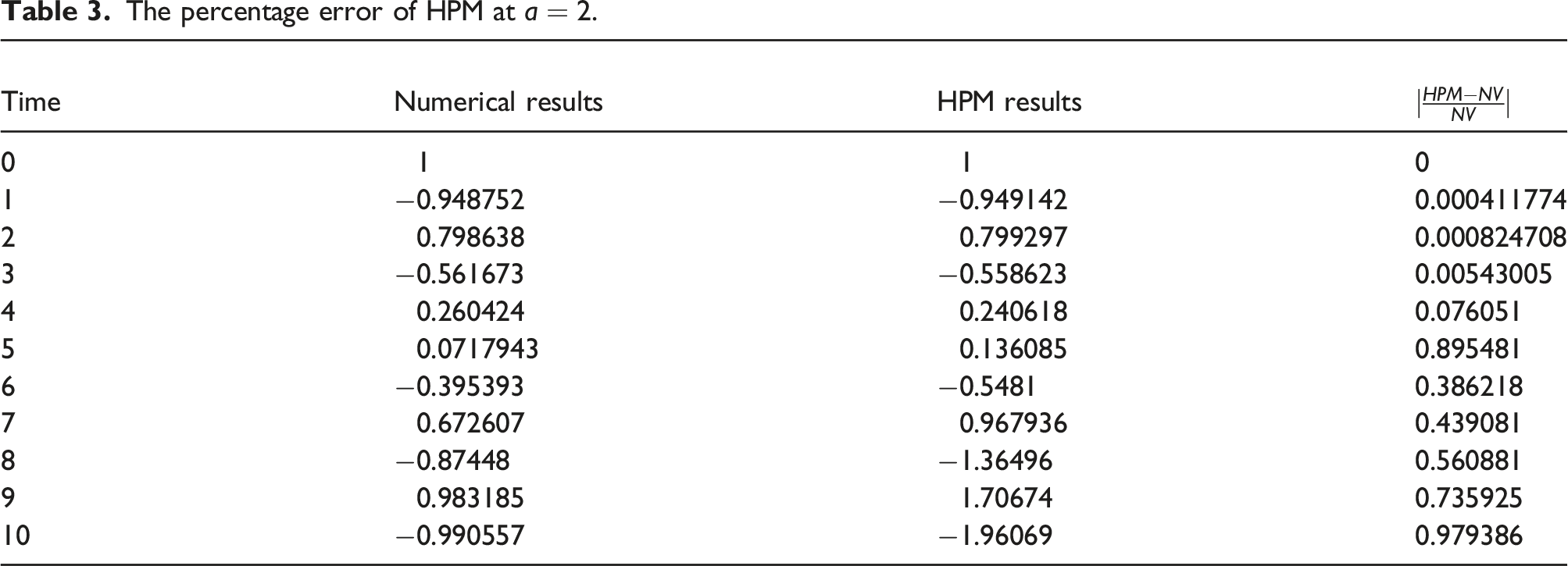
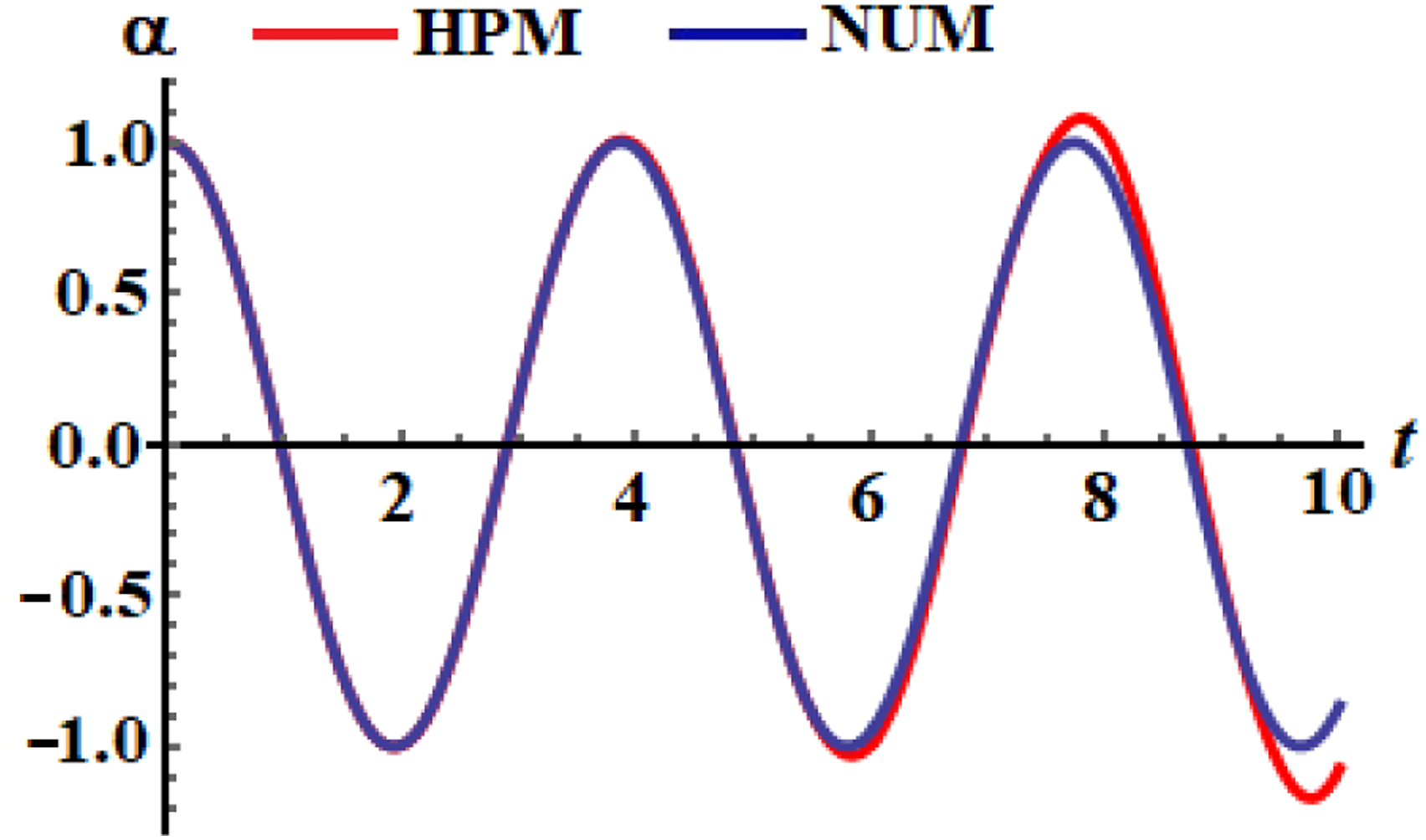
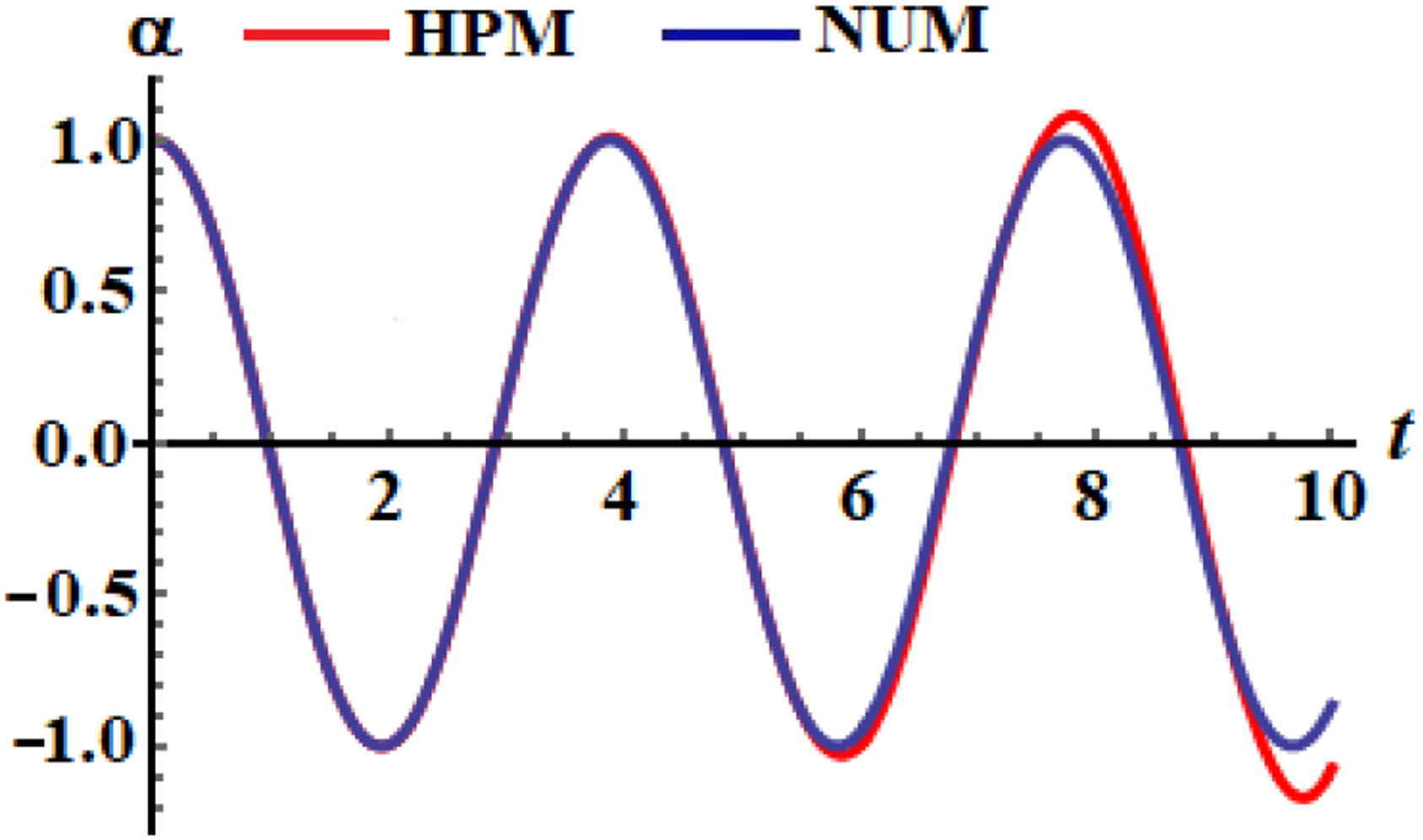
This section emphasizes the high degree of accuracy of the HPM results by contrasting them with numerical (NUM) ones generated by using the fourth-order RKM.
The percentage error of HPM at
The percentage error of HPM at
The percentage error of HPM at
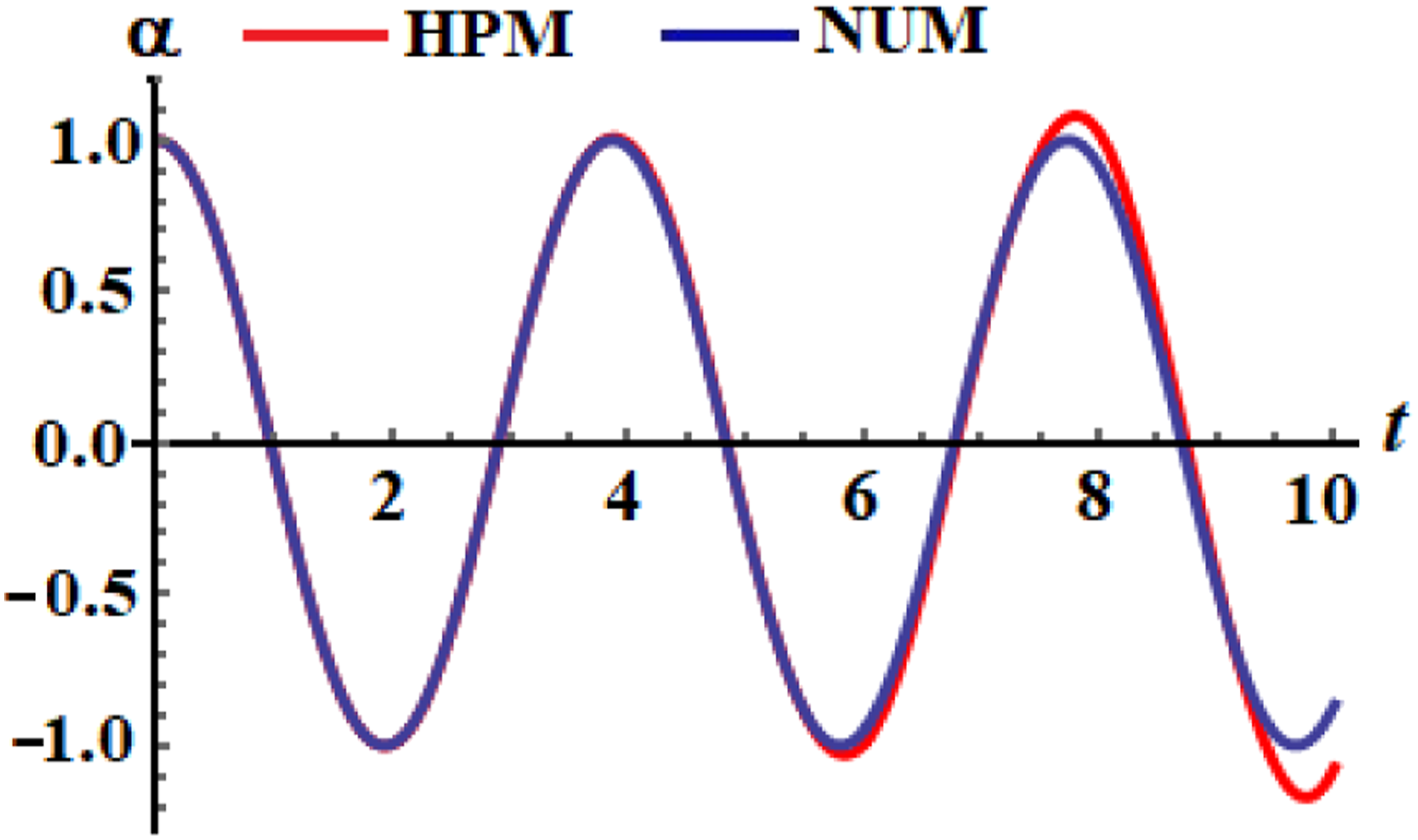
Illustrates the difference between the HPM and NUM solution at
Shows the variation of
Describes the plotted curves by HPM and NUM at
In Figures 4–6, the displayed curves are calculated when
Conclusion
The asymptotic analytic solution of the EOM of an excited pendulum subjected to CSSM has been obtained using the HPM. The fourth-order RKM is used to achieve the numerical solution of the original governing EOM. These solutions have been compared through some graphical plots. The feedback observation is that high matching between them, which demonstrates the great accuracy of the obtained analytic solutions. The phase plane graphs of the gained solutions that have forms of closed symmetric curves shows the stability of these solutions.
Footnotes
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) received no financial support for the research, authorship, and/or publication of this article.
Data availability
Data sharing is not relevant for this study because none of the datasets were produced or looked at.