In this study, the motion of Lagrange’s gyro about its fixed point in the presence of a perturbed torque, a gyroscopic torque, and a varied restoring one is searched. We assume sufficiently small angular velocity components in the direction of the principal axes that differ from the dynamical symmetry one and a restoring torque that is considered to be greater than the perturbing one. In this manner, we replace the familiar small parameter that was used in previous works with a large one. In such cases, the gyro equations for motion (EOM) are formulated in the form of a two-degrees-of-freedom (DOF) autonomous system. We average the obtained system to get periodic solutions and motion’s geometric interpretation of the problem using the large parameter. The regular precession and the pure rotation of the motion are obtained. A numerical study is evaluated for asserted the used techniques and showed the influence of the changing parameters of motion on the gyro behavior. The trajectories of the motions and their stabilities are discussed and analyzed. The novelty of this work lies in how to adapt the method of large parameter (MLP) to solve the rigid body problem, especially since it has been assumed initially that its angular velocity or its initial energy are very small.
The problems of rotational motion of solid bodies around a fixed point in space are among the most important problems in classical mechanics. The importance of this issue is due to the significant and vital applications on large scales in mechanics, whether in civilian or military life, as well as in our daily lives. For example, but not limited to, gyroscopic movements are considered an essential application of these issues. These gyroscopes are used in aircraft, submarines, spaceships, missiles, and a very large number of different vehicles, military and civil industries, such as radars, and in other user devices in our daily lives.1–4
Perturbation methods5–7 have been used recently, on a large scale, to find the approximate solutions (AS) of the spatial motion of the rigid body (RB), as it is difficult to obtain the general solutions to this problem because they necessarily need a fourth initial integration according to Jacobi’s theory. The general form of this integral was not yet obtained, but it was found in famous special cases that impose restrictions on the coordinates of the center of gravity and the values of the principal moments of inertia of the RB.8,9 Among these methods are the modifications of the small parameter method (MSPM), the averaging approach (AA), the Krylov–Bogoliubov–Mitropolski technique (KBMT), the multiple-scales approach (MSA), the method of the MLP, and others.
When the movement of RB is taken into account while being impacted by a gravitational field, a Newtonian field (NF), an electromagnetic field (EMF), and the existence of a gyro torque (GT), the MSPM is employed in10–22 to find its AS in10,11 under the action of a uniform gravity field, while12 looks into how the NF affects on the RB motion. It should be mentioned that when the frequency of the system had integer values or their multiple inverses, the resulting solutions consisted of discrete singular points. When the motion is impacted by the third component of the GT besides the NF, all singularities have been permanently resolved.13 The criteria of the Kovalevskaya and Euler–Poinsot cases, respectively, were applied to the RB movement in14 and15 when the impact of all components of GM was taken into consideration. It was found that for any value of the system’s frequency, the resulting solutions were entirely devoid of any singularities. This method was recently used in16 to explore how the RB moved in compliance with Bobylev–Steklov criteria while the body was being impacted by the EMF, the GT, and the NF. When the EMF and the GT were acted on the body, the authors of17 hypothesized that the center of mass is shifted somewhat from the body axis of dynamical symmetry. The acquired results are regarded as a generalization of those found in18 and.19 See 20–22 for further details on how the strategy of this method might be used to address different SB issues.
The KBMT is used in2,23–25 to obtain the AS of the RB under the influence of a gravitational field.23 The gained results were generalized in2 and,24 respectively, when the body was subject to NF and GT. The authors of25 constrained the body’s motion so that its inertia ellipsoid was almost equal to its inertia rotation. It ought to be noted that, in contrast to the equivalent solutions in,2,24,25 the solutions that have been created in23 include singular points when the body’s frequency comprises integer data or their inverses. This is because a new frequency, which depends on the GT, was employed in.23–24
Over the past 40 years, the AA has been employed frequently to find the AS for a symmetric RB’s spinning motion.26–31 This motion has been studied in three different cases: when the body was impacted by a uniform gravity field,26,27 an NF,28,29 and the action of a GT.22,23 The effect of perturbing moments on a body’s motion has been taken into account. The guiding EOM is constructed using the basic equation of the RB angular momentum, where a tiny parameter was added by using some applied assumptions. Therefore, the AS of the averaging systems of the EOM is obtained. According to,30 in addition to the effects of the EMF on the RB, its inertia ellipsoid and rotations are also thought to be closely related. The generalization of this work is found in.31
The motivation of this study resides in the adaptation of the MLP to the rigid body problem, especially given the initial assumption that the rigid body’s angular velocity or initial energy are relatively minimal. When perturbing, gyroscopic, and restoring torques are present, Lagrange’s gyro’s motion around its fixed point is investigated. Two assumptions are assumed; restoring torque, which is assumed to be higher than the perturbing torque, and sufficiently tiny angular velocity components in the direction of the primary axes that diverge from the dynamical symmetry one. In this way, we swap out the familiar tiny parameter that was utilized in earlier studies for a large one. In these circumstances, the gyro EOM is expressed as a 2DOF autonomous system. Utilizing the MLP, we average this system to obtain the desired periodic solutions. The possible regular precession and pure rotation of the body’s motion are acquired. The effectiveness of the employed methods is assessed using a numerical analysis,32 which also demonstrated the impact of varying parameters on the behavior of the gyro’s motion. The motion and stability trajectories are discussed and analyzed in a suitable manner.33,34 There are no restrictions on the body’s motion about the third principal axis, as in previous works, and the body will be given small energies initially for the motion instead of high energies as in previous works.
Description of the problem
As an extension of this field of study, we present a problem’s description of a rotatory motion of a gyro with a mass about a fixed origin point of two frames; is a fixed frame in space where is considered to be a downward direction and a mobile frame whose axes are directed along the body’s principal axes of inertia. The action of a gyrostatic torque about the moving -axis and a restoring torque , comes from a unit charge on the -axis, a magnetic field of strength , and a perturbing torque is considered. It is assumed that the gyro has sufficiently small angular velocities about and axes, in addition to the restoring torque is large compared with the perturbed vector torque acting on the principal inertia gyro’s axes. Therefore, a large parameter 35,36,37 can be inserted in the EOM and therefore, the AA6,7,38 can be used to average the gyro’s system of motion, which can be to determine Euler’s angles. The geometric illustrations are given as a function of and the body’s parameters. Consider the gyro-rotation ellipsoid that coincides with its ellipsoid of inertia, and the body’s center of mass is displaced by a distance of the order .Then, the principal inertia moments and become31,39
where are dimensionless constants of order unity, the symbol mentioned above is the characteristic value for inertia moments; are dimensionless finite quantities compared with , and represents a distance from the center of mass to .
We will extract the moment caused by the electromagnetic field to learn more about the gyrostatic motion. Consequently, the Lorentz force 40 is utilized such that and where is the position vector between the unit charge and , and is the gyro’s angular velocity. Then, the targeted moment has the form with the following three components in the direction of the gyro principal axes of inertia, where is the angle of nutation.
where and are the angles for self-rotations and precession, respectively, and denotes a gravity acceleration.
Solving the problem under new assumptions
Given the new circumstances, this section presents a reduction of the governing system of EOM into an autonomous system of 2DOF second-ordered essential equations. Moreover, an appropriate averaging system is obtained. To achieve this aim, the following conditions are imposed
Hence, a large parameter can be inserted in the form
Averaging the considered problem in a suitable manner for35 and making use of assumptions (4), the restoring torque becomes
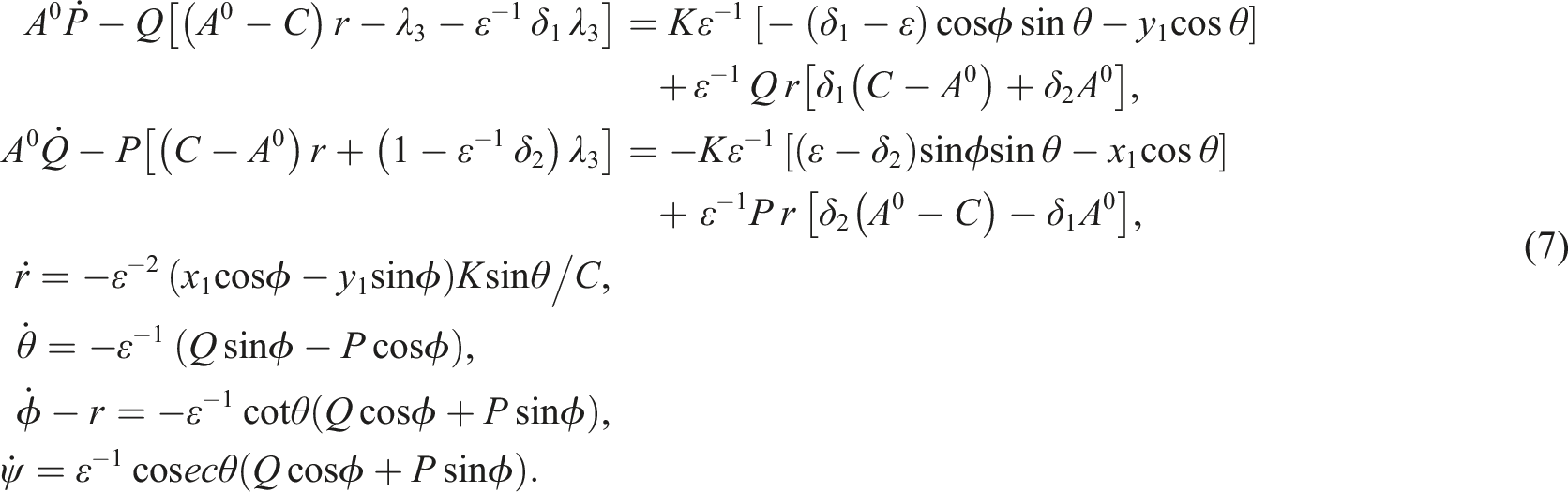
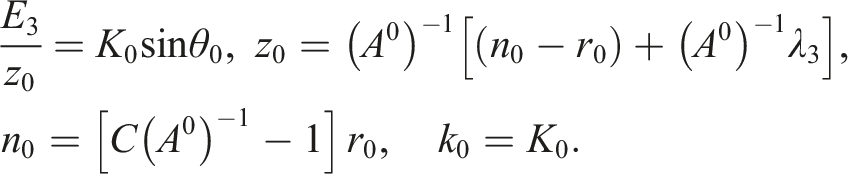
where , and are the initial values of the corresponding variables, while is a phase oscillation. From system (7) we can define
We aim to find the solutions of system (7) when . Using (9), equation (11) can be rewritten in the form
The axial component of angular velocity can be rewritten as follows
Using (13) and (14) to rewrite (7) and (12) in the form
where
Due to (13), (14), and (16), are periodic functions with a period . In accordance with (13) and (14), the functions are periodic functions of and with periods of . Then, we can rewrite system (15) in a more suitable form
where is a vector variable function, are fast variables functions, and are vector-valued functions that can be determined from the right-hand sides (15).
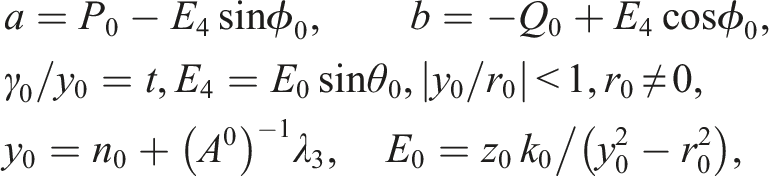
Let denotes the matrix of two-variable vectors . Then the perturbed torques are assumed to be independent of . Introducing new variables for a system (17) as follows41
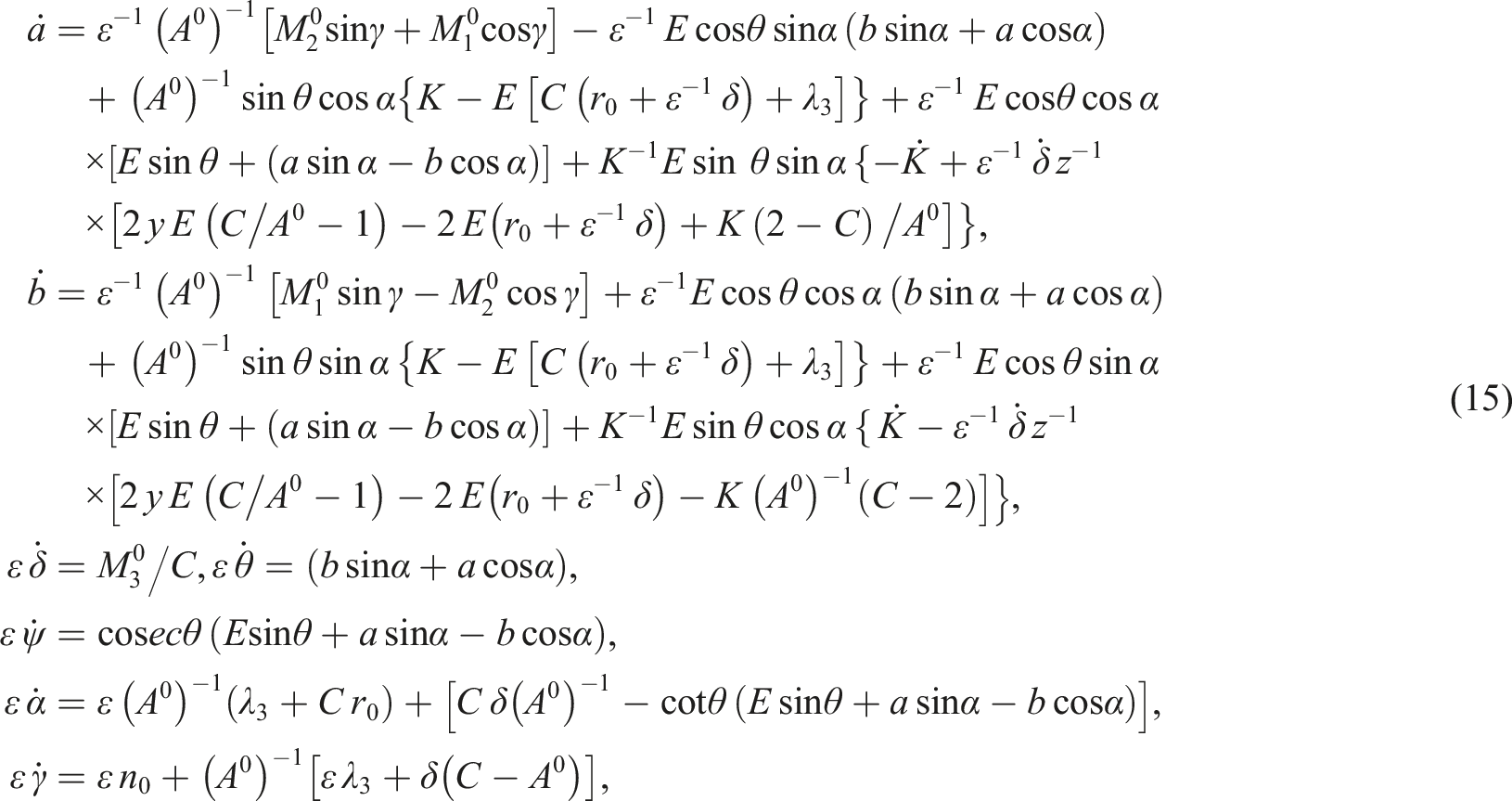
Then, system (17) can be rewritten for the variable and as follows
Choosing the vector-valued functions and as follows42
where
Here, the partial derivatives of and are treated as the below matrix
The averaging of the system (19) to determine the slow variables is as follows
In a similar way, by averaging the system (19), the fast variables can be determined as follows
Using (26) and (27), the following system can be obtained
Here, represent a matrix for partial derivatives.
The required solutions for system (28) will be given as follows
Consequently, functions and can be expressed in forms
where
The functions and are vectors and they have the forms
By using the Fourier series, equation (20) is solved. From (21), we obtain the function . Using (28) and (29), the solutions and can be obtained. Then the approximated functions and are constructed according to (30). Now we consider the case of dissipative torques.
The dissipative torques case
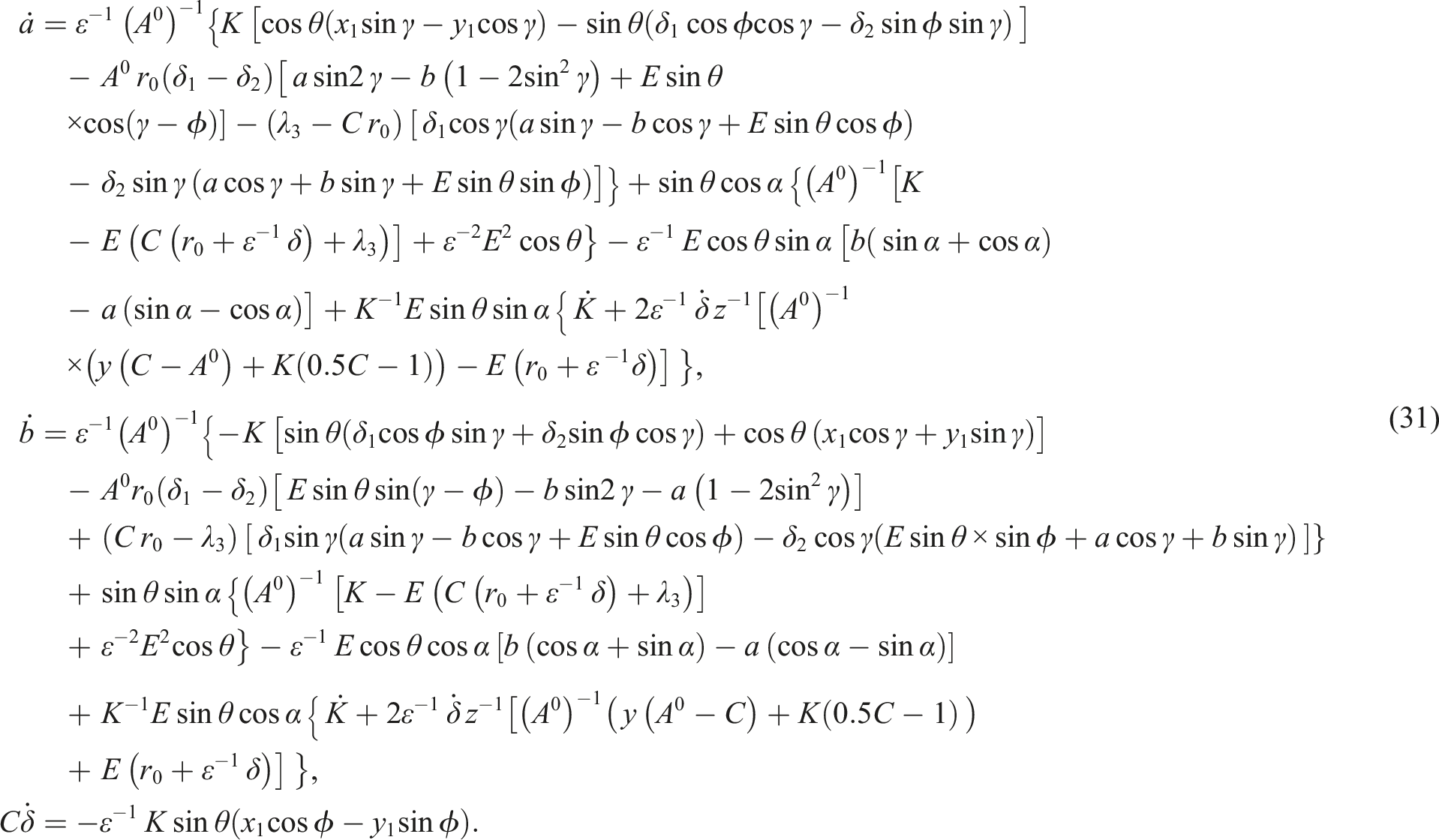
This section presents the averaging procedure to find the required analysis for the angle of nutation and the angle of precession , depending on the large parameter and time. Making use of (6) and (8), then the above three equations of system (15) can be rewritten as follows
Now, we aim to solve system (31) by applying the averaging technique mentioned above. From (21), one obtains , and as follows
Using equations (30), and (32)–(34), we obtain Euler’s angles and corresponding to the functional components for the case of the dissipative torque (8), as follows
Interpretation of the results
This section presents a discussion of the attained solutions which were mentioned before by intensive programs and studies the influence of changing the parameters of the motion on the solutions. Therefore, consider the next set of data
Through a computer program, we represent the numerical results of and mentioned in previous sections, as in Tables 1 and 2
Gives the solutions at and.
0
704.68
−13.44622
63,711.48
−64.92043
10
694.03
−18.44141
51,512.79
−37,468.73
20
684.7
−8.829416
19,668.85
−60,540.69
30
684.7
8.829418
−19,668.85
−60,540.69
40
694.03
18.44141
−51,512.8
−37,468.72
50
704.68
13.44622
−63,711.48
−64.91486
60
709.83
3.315035
−51,574.54
37,428.61
70
710.27
−5.19E-01
−19,707.02
60,645.73
80
710.27
5.19E-01
19,707.02
60,645.73
90
709.83
−3.315036
51,574.54
37,428.61
100
704.68
−13.44623
63,711.48
−64.93157
110
694.03
−18.44141
51,512.8
−37,468.73
120
684.7
−8.829412
19,668.84
−60,540.7
130
684.7
8.829429
−19,668.88
−60,540.68
140
694.03
18.44141
−51,512.79
−37,468.74
150
704.68
13.44622
−63,711.48
−64.91891
160
709.83
3.315033
−51,574.53
37,428.62
170
710.27
−5.19E-01
−19,707.03
60,645.73
180
710.27
5.19E-01
19,707
60,645.74
190
709.83
−3.315038
51,574.54
37,428.6
200
704.68
−13.44623
63,711.48
−64.94272
210
694.03
−18.44141
51,512.81
−37,468.71
220
684.7
−8.829419
19,668.86
−60,540.69
230
684.7
8.829421
−19,668.86
−60,540.69
240
694.03
18.44141
−51,512.81
−37,468.71
250
704.68
13.44623
−63,711.48
−64.93816
260
709.83
3.315025
−51,574.5
37,428.65
270
710.27
−5.19E-01
−19,707.05
60,645.72
280
710.27
5.19E-01
19,706.98
60,645.75
290
709.83
−3.315034
51,574.53
37,428.61
300
704.68
−13.44622
63,711.48
−64.92348
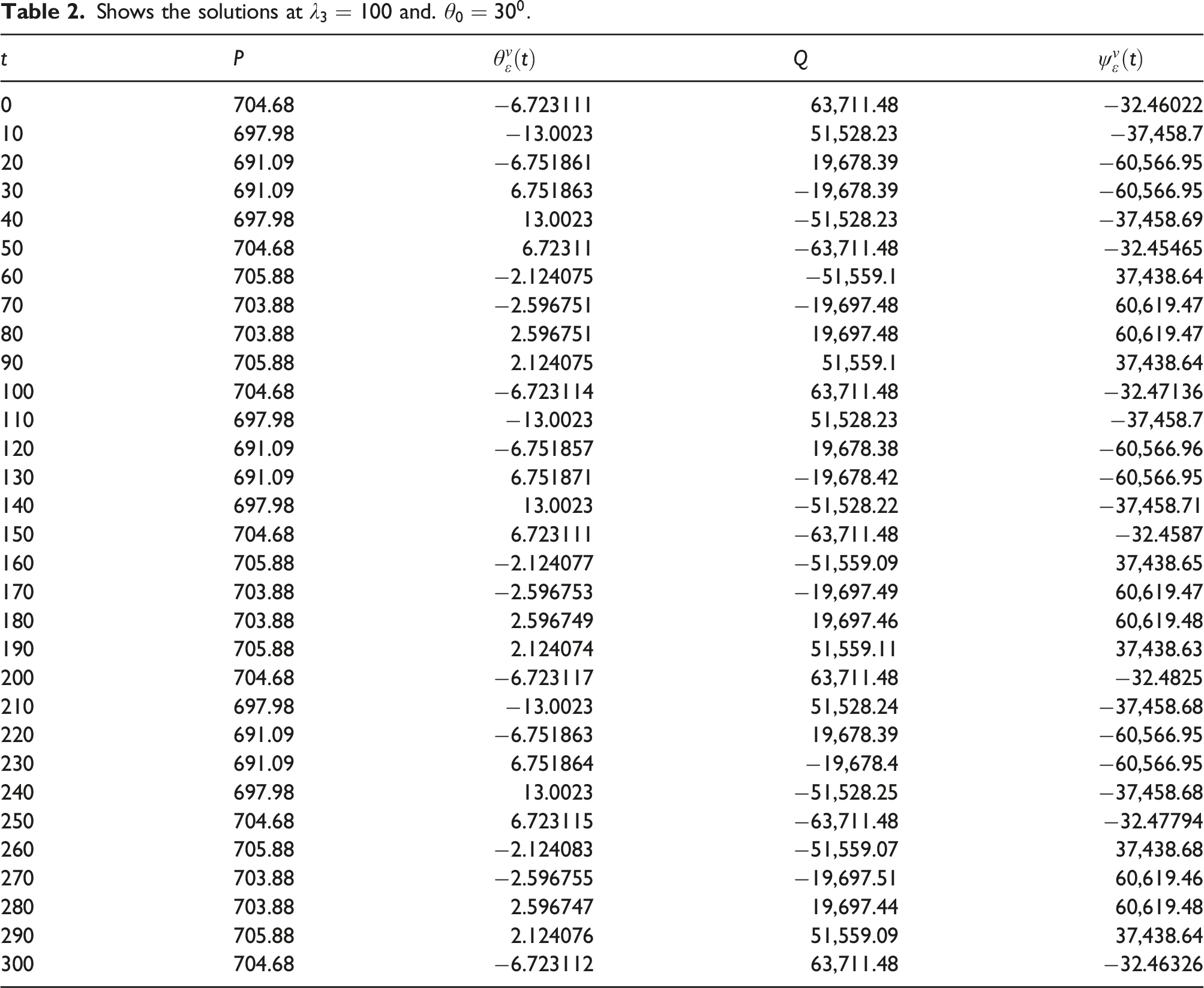
Shows the solutions at and.
0
704.68
−6.723111
63,711.48
−32.46022
10
697.98
−13.0023
51,528.23
−37,458.7
20
691.09
−6.751861
19,678.39
−60,566.95
30
691.09
6.751863
−19,678.39
−60,566.95
40
697.98
13.0023
−51,528.23
−37,458.69
50
704.68
6.72311
−63,711.48
−32.45465
60
705.88
−2.124075
−51,559.1
37,438.64
70
703.88
−2.596751
−19,697.48
60,619.47
80
703.88
2.596751
19,697.48
60,619.47
90
705.88
2.124075
51,559.1
37,438.64
100
704.68
−6.723114
63,711.48
−32.47136
110
697.98
−13.0023
51,528.23
−37,458.7
120
691.09
−6.751857
19,678.38
−60,566.96
130
691.09
6.751871
−19,678.42
−60,566.95
140
697.98
13.0023
−51,528.22
−37,458.71
150
704.68
6.723111
−63,711.48
−32.4587
160
705.88
−2.124077
−51,559.09
37,438.65
170
703.88
−2.596753
−19,697.49
60,619.47
180
703.88
2.596749
19,697.46
60,619.48
190
705.88
2.124074
51,559.11
37,438.63
200
704.68
−6.723117
63,711.48
−32.4825
210
697.98
−13.0023
51,528.24
−37,458.68
220
691.09
−6.751863
19,678.39
−60,566.95
230
691.09
6.751864
−19,678.4
−60,566.95
240
697.98
13.0023
−51,528.25
−37,458.68
250
704.68
6.723115
−63,711.48
−32.47794
260
705.88
−2.124083
−51,559.07
37,438.68
270
703.88
−2.596755
−19,697.51
60,619.46
280
703.88
2.596747
19,697.44
60,619.48
290
705.88
2.124076
51,559.09
37,438.64
300
704.68
−6.723112
63,711.48
−32.46326
From Tables 1 and 2, we get the approximated solutions when and . From these tables, we deduce that the amplitude of the motion increases when and decrease and vice versa. We also discover that, while the amplitude of the motion increases, the number of oscillations remains constant. We conclude that the number of oscillations of the gyro about the -axis remains the same for increasing or decreasing both the third component torque and the initial nutation angle , with different amplitudes of the motion about this axis. Moreover, from Tables 1 and 2, we observe that the amplitude of the approximated solutions decreases when and decreases and vice versa. That is the change of describes the orientation for a gyro at every point in time .
Numerical procedure
This section presents a numerical procedure named the method of Runge–Kutta of fourth order applying a computer discussion to solve a system (10). One aims to find the required periodic solutions of and . To achieve this objective, let us consider the values and the considered data in the previous section.
Introducing the above data and using the mentioned numerical method with a computer procedure to get numerical results of and via time , as in Tables 1 and 2 for different values of the torque and . We note that the amplitudes of the motion increase with decreasing of and , and vice versa. We also note that the number of oscillations of the gyro is the same with different amplitudes of the motion, see Tables 1 and 2.
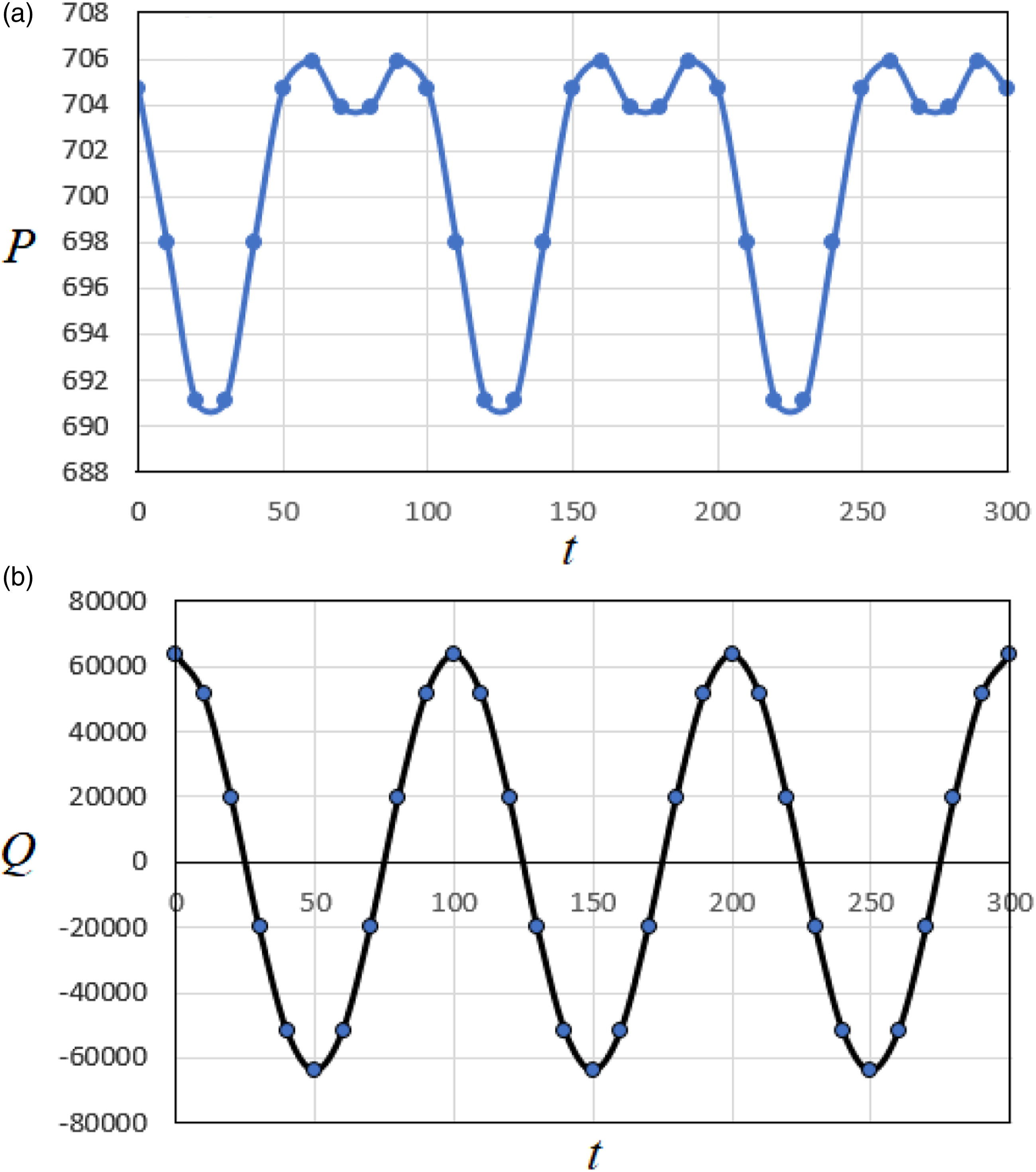
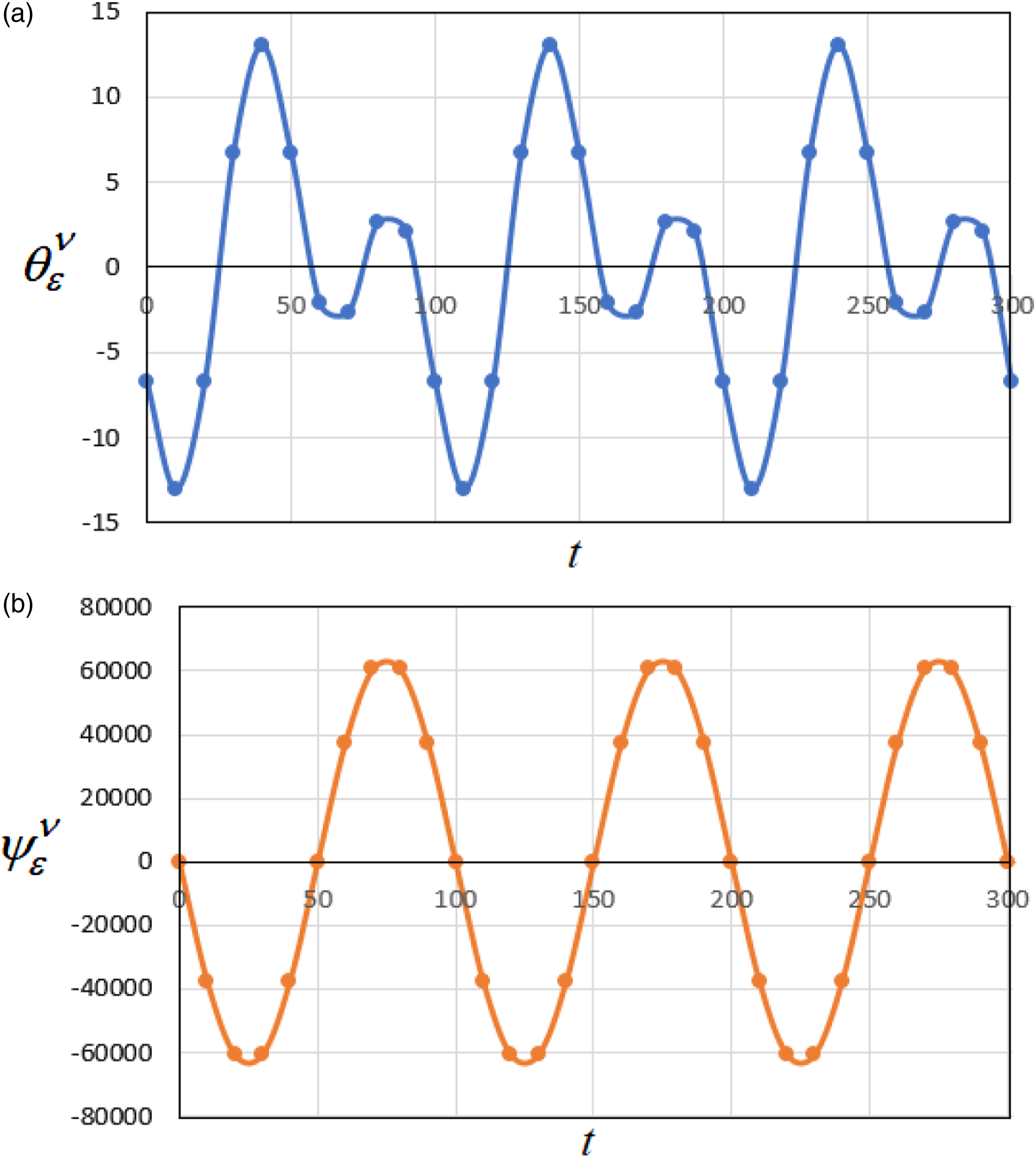
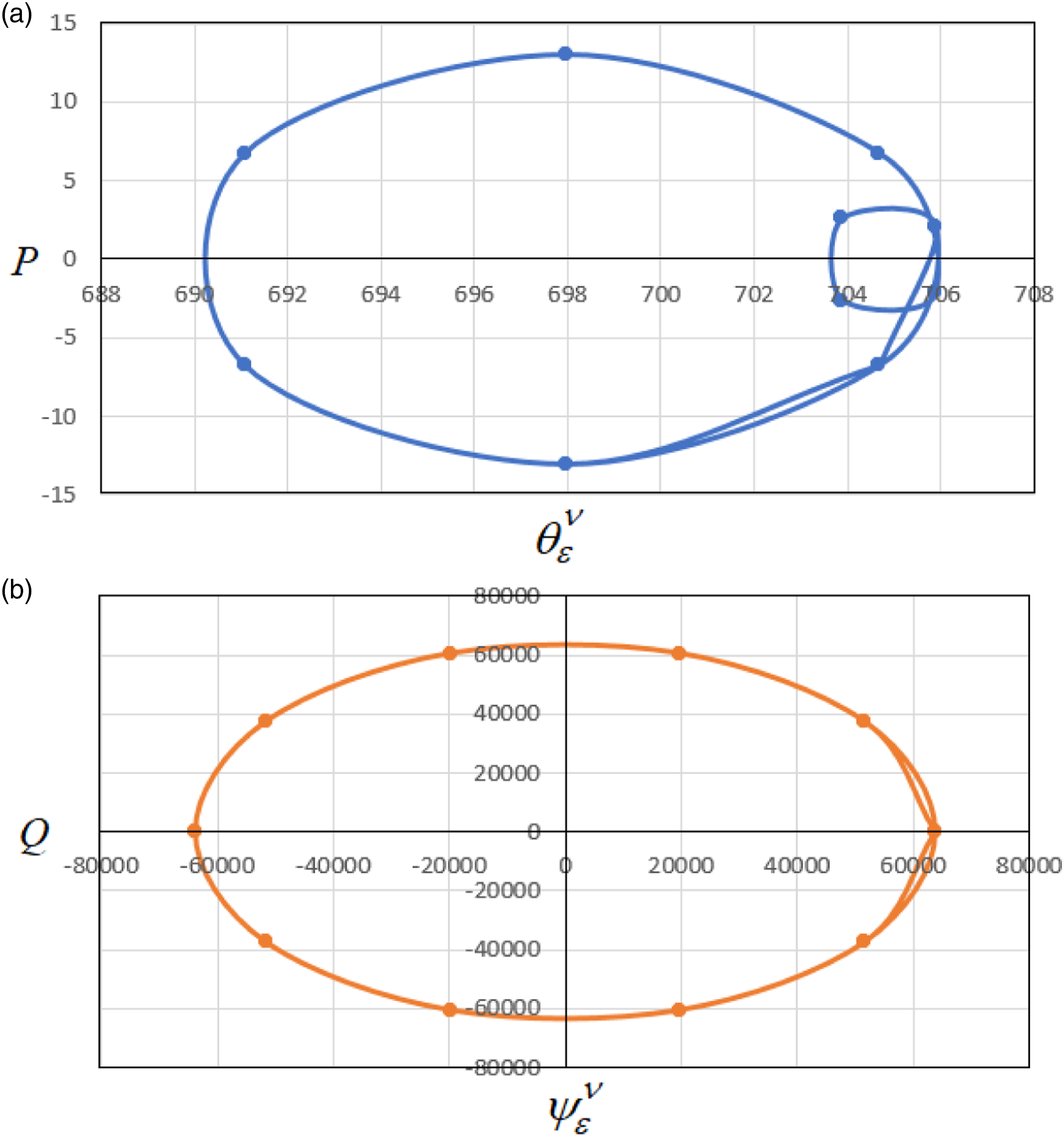
The included results in Table 1 have been plotted in Figures 1–3 to show how the gyro’s motion behaves. The time histories of and are depicted according to the curves in these figures, in which they exhibit periodic behavior, where the displayed curves in portions (a) have substantially smaller amplitudes than the depicted curves in portions (b). It can be seen in Figure 2(a) that waves exhibit closer data at the top of the represented wave, whereas the drawn curves in other portions of these figures exhibit entirely periodic curves throughout the period studied. Parts (a) and (b) of the Figure 3 show the projections of these curves in the planes and , which take the shape of closed curves and convey the stability of the gyro’s motion.
Presents the curves of the results in Table 1: (a) , (b) .
Portrays the curves of the results in Table 1: (a) , (b) .
Explores the curves of the results in Table 1: (a) in the plane , (b) in the plane .
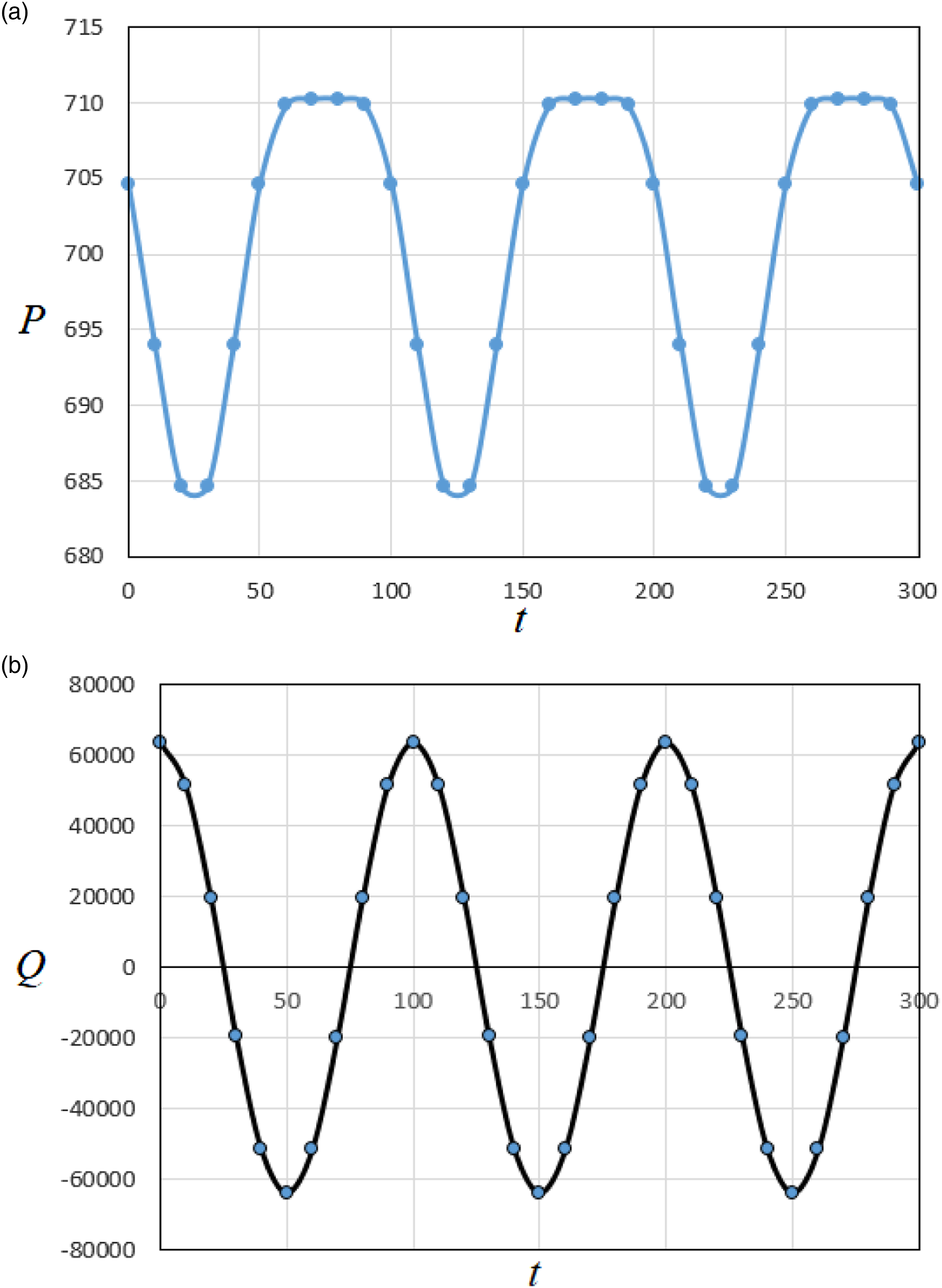
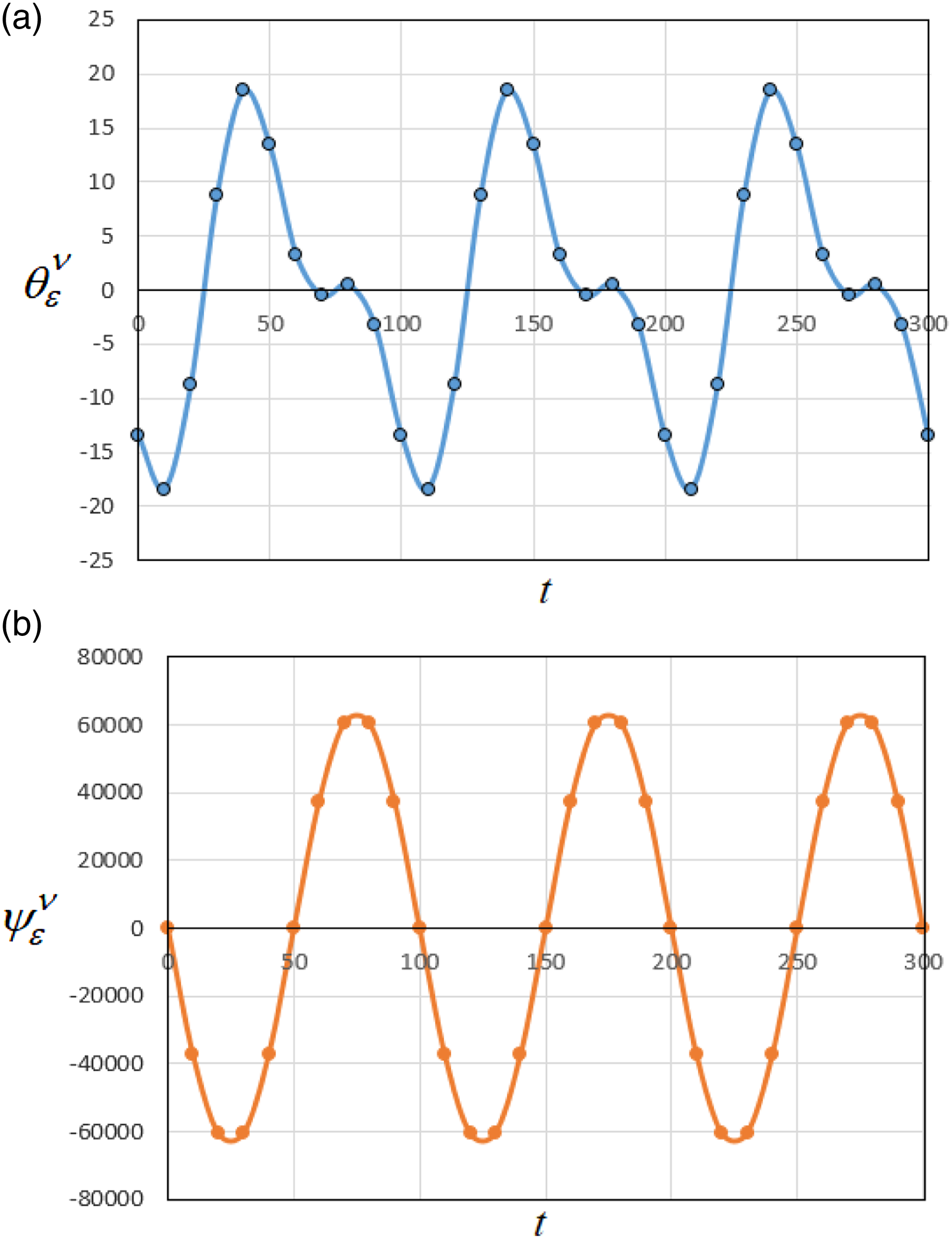
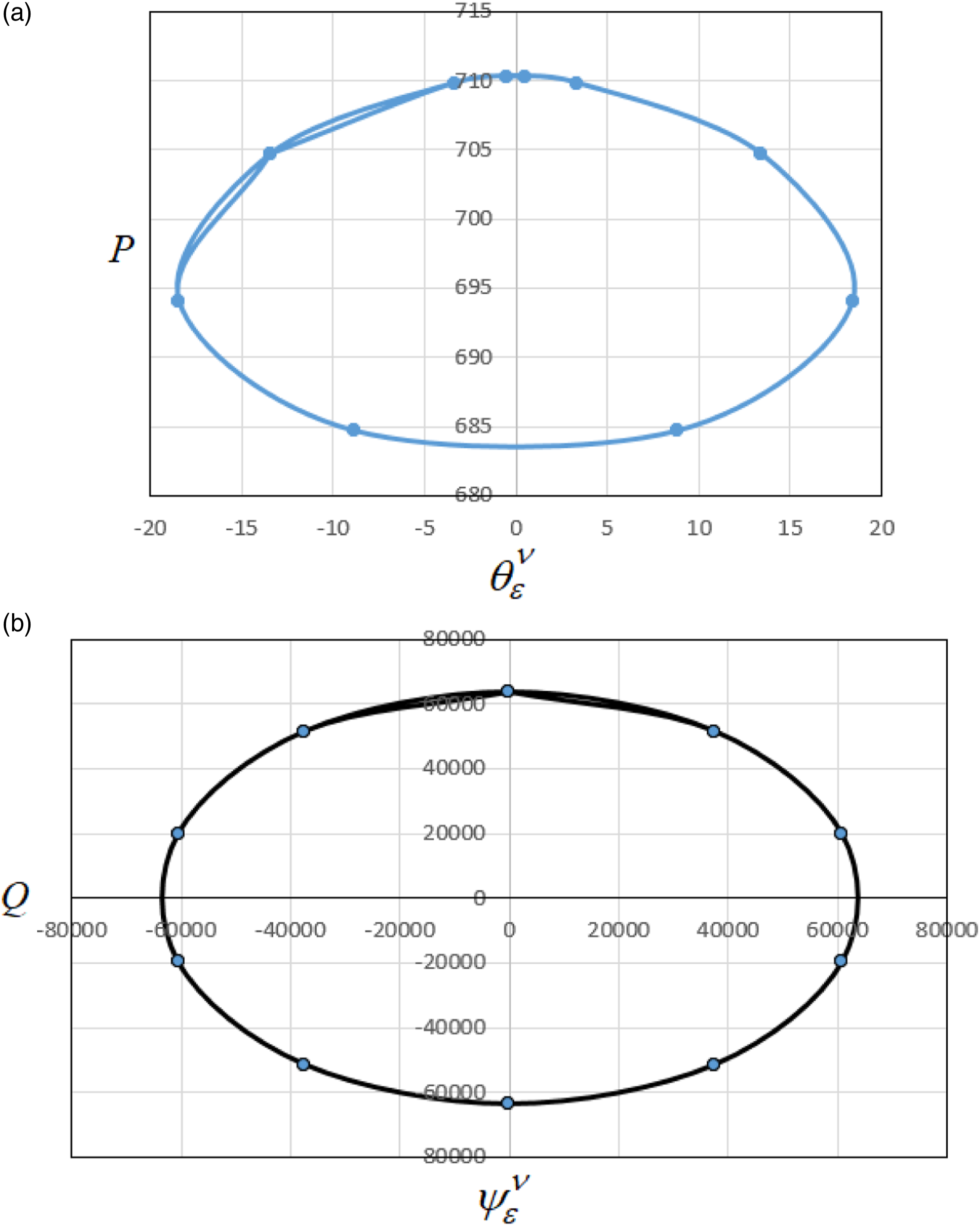
The considered results in Table 2 have been graphed in Figures 4–6, to reveal the behavior of the gyro’s motion. Curves of Figures 4 and 5 show the time histories of and . They have periodic behavior, in which the amplitudes of the presented curves in portions (a) are much less than the plotted curves of parts (b). It is observed that the form of waves suffers from some ups and downs in one wave, whether it is at its top or bottom, while the drawn curves in parts (b) have completely periodic curves during the examined time interval. The projections of these curves in the planes and are sketched, respectively, in parts (a) and (b) of Figure 6, which have the form of closed curves and express the stability of the gyro’s motion.
Presents the temporal history of the results in Table 2: (a) the solution , (b) the solution .
Describes the results in Table 2: (a) the variation of , (b) the variation of .
Shows the results in Table 2: (a) the projection of the curves in the plane , (b) the projection of the curves in the plane .
Conclusions
The motion of the gyro in a case analogous to the Lagrange case is studied, taking new conditions of its motion into consideration. The gyro is acted upon by EMF, NF, GT, and restoring torque. New conditions of motion have been considered, where the gyro moves with slow initial kinetic motions in its equatorial plane. We replace the familiar small parameter studied in previous works29,43,44 with a large one .35. Euler’s system of motion has been obtained and treated to an averaged one. In the presence of the large parameter and the averaging procedure, this system has been solved. The angles of nutation and precession are obtained as functions of and the gyro’s parameters. Such angles are approximated to second-order and appear without parameters of the perturbing moment. The solution gives the regular precession case in the absence of the deviation of the gravity center. Many cases of studies can be obtained as special cases from this work, for example, 45,46 by neglecting each of and , or both of them or taking the restoring torque equals a constant or function of . Computerized data are given for describing the periodicity of the obtained results using computer analysis procedures. The numerical Runge–Kutta method has been presented to investigate the numerical solutions and through an additional computer program. The geometric interpretations and stabilities of solutions have been examined. Our work studies the problem of rotation of a gyro with sufficiently low energies initially instead of high energies in previous works. Also, there are no restrictions on the rotations of the -axis. The large parameter is used instead of the small one, which gives us the chance to apply the MLP to obtain new solutions in a new domain for the motion. In future work, we will introduce the electric field beside the magnetic one due to a point charge, which makes the problem more interesting.
Footnotes
Acknowledgements
The authors would like to thank the Deanship of Scientific Research at Umm Al-Qura University for supporting this work by Grant Code: (22UQU4240002DSR13).
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: The authors would like to thank the Deanship of Scientific Research at Umm Al-Qura University for supporting this work by Grant Code: (22UQU4240002DSR13).
Data availability
No datasets were produced or examined. Therefore, sharing of data is not appropriate for this study.
ORCID iDs
A. I. Ismail
T. S. Amer
References
1.
HahnH. Rigid Body Dynamics of Mechanisms: Applications, Springer-Verlag: Berlin Heidelberg (2003).
2.
AmerTSAbadyIM. On the application of KBM method for the 3-D motion of asymmetric rigid body. Nonlinear Dyn2017; 89: 1591–1609.
3.
PassaroVMCuccovilloAVaianiL, et al.Gyroscope technology and applications: A Review in the industrial perspective. Sensors2017; 17: 2284.
4.
NathKKMallickR.Effect of rotation and magnetic field in the gyroscopic precession around a neutron star, Eur. Phys. J C2020; 80: 646.
5.
MalkinIG. Some problems in the theory of nonlinear oscillations, United States Atomic energy commission. TechnicaI Information Service, ABC-Tr-37661959.
6.
BogoliubovNNMitropolskyYA. Asymptotic methods in the theory of non-linear oscillations, Gordon & Breach, New York, NY, USA. (1961).
LeimanisE. The general problem of the motion of coupled rigid bodies about a fixed point, Springer, New York, NY, USA. 1965.
9.
YehiaH. Rigid body dynamics: A Lagrangian approach. Birkhäuser, Springer Nature Switzerland AG2022.
10.
IuA. Arkhangel’skii, On the motion about a fixed point of a fast spinning heavy solid. J. Appl. Math. Mech1963; 27: 1314–1333.
11.
IsmailAI, The motion of a fast spinning disc which comes out from the limiting case , Comput. Methods. Appl. Mech. Engrg. 16 (1998) 67–76.
12.
El-BarkiFAIsmailAI. Limiting case for the motion of a rigid body about a fixed point in the Newtonian force field. ZAMM1995; 75(11): 821–829.
13.
IsmailAIAmerTS. The fast spinning motion of a rigid body in the presence of a gyrostatic momentum , Acta Mech. 154 (2002) 31–46.
14.
AmerTS. Motion of a rigid body analogous to the case of Euler and Poinsot. Analysis2004; 24: 305–315.
15.
AmerTSAmerWS. The rotational motion of a symmetric rigid body similar to Kovalevskaya's case, Iran J. Sci. Technol. Trans. Sci2018; 42(3): 1427–1438.
16.
HeJAmerTEl-KaflyHF, et al.Modelling of the rotational motion of 6-DOF rigid body according to the Bobylev-Steklov conditions. Results Phys2022; 35: 105391.
17.
FaragAMAmerTSAmerWS. The periodic solutions of a symmetric charged gyrostat for a slightly relocated center of mass, Alex. Eng. J2022; 61: 7155–7170.
18.
ElfimovVS. Existence of periodic solutions of equations of motion of a solid body similar to the Lagrange gyroscope. J. Appl. Math. Mech1978; 42(2): 262–269.
19.
AmerTS. On the motion of a gyrostat similar to Lagrange’s gyroscope under the influence of a gyrostatic moment vector, Nonlinear Dyn (2008). 54: 249–262.
20.
AmerWS. On the motion of a flywheel in the presence of attracting center. Results Phys2017; 7: 1214–1220.
21.
AmerW. Modelling and analyzing the rotatory motion of a symmetric gyrostat subjected to a Newtonian and magnetic fields. Results Phys2021; 24: 104102.
22.
AmerTSAmerWSEl-KaflyH. Studying the influence of external moment and force on a disc’s motion. Scientific Reports2022; 12: 16942.
23.
IsmailAI. On the application of Krylov-Bogoliubov-Mitropolski technique for treating the motion about a fixed point of a fast spinning heavy solid. ZFW1996; 20(4): 205–208.
24.
AmerTSIsmailAIAmerWS. Application of the Krylov-Bogoliubov-Mitropolski technique for a rotating heavy solid under the influence of a gyrostatic moment. J. Aerosp. Eng2012; 25 (3): 421–430.
25.
AmerTSFaragAMAmerWS. The dynamical motion of a rigid body for the case of ellipsoid inertia close to ellipsoid of rotation. Mech. Res. Commu2020; 108: 103583.
26.
AkulenkoLDLeshchenkoDDChernouskoFL. Perturbed motions of a rigid body that are close to regular precession, Izv. Akad. Nauk SSSR. MTT1986; 21(5): 3–10.
27.
AkulenkoLDLeshchenkoDDKozochenkoTA. Evolution of rotations of a rigid body under the action of restoring and control moments. J. Comput. Syst. Sci2002; 41(5): 868–874.
28.
AmerTSAbadyIM. On the motion of a gyro in the presence of a Newtonian force field and applied moments. Math. Mech. Solids2018; 23(9): 1263–1273.
29.
IsmailAIAmerTSEl BannaSA. Electromagnetic gyroscopic motion. J. Appl. Math2012; 2012: 1–14.
30.
AmerTS. On the rotational motion of a gyrostat about a fixed point with mass distribution. Nonlinear Dyn2008; 54: 189–198.
31.
AmerTS. The rotational motion of the electromagnetic symmetric rigid body. Appl. Math. Inf. Sci2016; 10(4): 1453–1464.
32.
ZhaoDAngLJiCZ. Numerical and experimental investigation of the acoustic damping effect of single-layer perforated liners with joint bias-grazing flow. J. Sound Vib2015; 342: 152–167.
33.
ZhaoDJiCTeoC, et al.Performance of small-scale bladeless electromagnetic energy harvesters driven by water or air. Energy2014; 74: 99–108.
34.
HanNZhaoDSchluterJU, et al.Performance evaluation of 3D printed miniature electromagnetic energy harvesters driven by air flow. Applied Energy2016; 178: 672–680.
35.
IsmailAI. Solving a problem of rotary motion for a heavy solid using the large parameter method. Advances in Astronomy2020; Volume 2020: 7. Article ID 2764867.
36.
IsmailAI. On new modifications of some perturbation procedures, Discrete Dynamics in Nature and Society. Volume 2021. 2021; Article ID 6681932: 10.
37.
IsmailAI. Application of large parameter technique for solving a singular case of a rigid body, Advances in Mathematical Physics; 2021. 2021; Article ID 8842700: 12.
38.
ChernouskoFLAkulenkoLDLeshchenkoDD. Evolution of motions of a rigid body about its center of mass, Springer International Publishing AG (2017).
39.
El-SabaaFMAmerTSSallamAA, et al.Modeling and analysis of the nonlinear rotatory motion of an electromagnetic gyrostat. Alex. Eng. J2022; 61(2): 1625–1641.
LeshchenkoDD. On the evaluation of rigid body rotations. Int. J. Appl. Mech1999; 35(1): 93–99.
42.
VolosovVMMorgunovBI. Averaging method in the theory of nonlinear oscillatory systems, Izd. MGU, Moscow (1971).
43.
KarapetyanGATananyanHG. The small parameter method for regular linear differential equations on unbounded domains,. Eurasian Math. J2013; 4(2): 64–81.
44.
MusafirovEV. The reflecting function and the small parameter method,. Applied Mathematics Letters2008; 21(10): 1064–1068.
45.
AkulenkoLDZinkevichYSKozachenkoTA. et al.The evolution of the motions of a rigid body close to the Lagrange case under the action of an unsteady torque,Journal of Applied Mathematics and Mechanics2017; 81(2): 79–84.
46.
LeshchenkoDDErshkovSV. On a new type of solving procedure for Euler-Poisson equations (rigid body rotation over a fixed point). Acta Mechanica2019; 230(3): 871–883.