
Abstract
A rotary motion is studied, which is used as a paradigm in both mathematics and dynamics. In this motion, the body moves around its axis. Important examples of this motion are the earth, wheels for cars or bicycles, cooling fans, airplanes, radars, and motion of the discs. In this article, we consider one of these motions such as the slow rotational motion of a disc of high natural frequency around a fixed point different from its center of mass. Suppose a constant gyrostatic couple acts on the body about the axis of symmetry. Let us consider the axis of symmetry coincide with one of the main axes of inertia. The controlled nonlinear independent system of equations of motion is obtained in the form of six nonlinear differential equations in the presence of three independent first integrals. This system is reduced to an alternative independent quasi-linear system consisting of two differential equations with only one integral. At first, when the body rotates slowly with a small angular speed about the axis of the symmetry, we achieve a large parameter for the motion which is proportional to the inverse of the angular velocity component. Then, we use the large parameter technique to obtain approximate and high-frequency analytic solutions for this motion. This technique enables us to introduce new conditions of the motion, save a lot of energy required to move the disc, and obtain new approximated solutions in a new domain of the disc parameters. We present a digital example of the problem to clarify the inferences of the motion depending on the parameters of the body. On the other hand, we use the Runge–Kutta algorithmic method to obtain the numerical solutions corresponding to the approximate solutions of the considered independent system. We investigate the inaccuracies and errors of analytic and numerical solutions by comparing them. This problem offers many applications in gyroscope dynamics, industrial engineering, astrophysics, navigation, satellites, and space engineering.
Keywords
Introduction
The problem of the rotational motion of a rigid body around its fixed point attracts the attention of many outstanding researchers in the last years due to its important applications in both civil and military life. In Ref. 1, the rotary motion of a disc around one fixed point acted upon by gravitational and Newtonian force fields is studied. The author has used the third component of the angular speed to achieve a large parameter for solving this problem. Using this technique, the equations of motion are obtained and solved. The analytic and digital solutions are obtained and compared. The geometric investigations of the motion are searched. In Refs. 2–5, the problems of asymmetric or symmetric rigid body when the body rotates in a gravitational or Newtonian or Electromagnetic fields are studied. The KBM technique is applied to construct and solve the system of equations of motion. In Ref. 6, the existence of important integrable cases for bodies rotating about a fixed point in the Newtonian force field is considered. The solutions for this problem are obtained by deriving the Euler–Poisson system of equations of motion. The periodic solutions for the problem are attained by using the small parameter method. On the other hand, the possibility of obtaining a fourth first integral for the body’s motion, in a simple way, is examined in Ref. 7. In Ref. 8, the evolution of rotating motions of a rigid body around its mass center is studied. The author derived the Euler–Poison motion equations for different problems. They presented the analytic solutions for these problems by many outstanding methods. They presented the geometrical illustrations for these motions. In Ref. 9, the authors studied the problem of rigid bodies in the presence of new initial conditions. They derived the equations of motion for these bodies and presented the averaging methods for solving the nonlinear systems to different dynamical models. In Ref. 10, the rigid body problems of different dynamical systems are studied. They presented many conditions and procedures for solving the integrable cases of the motions. They used Euler’s angles to study the behaviors of the bodies at every moment of the time. Nayfeh presented in Refs. 11and 12 many mathematical techniques for solving various problems of vibrations and rotational motions in engineering, physics, and many other fields of technology. Such methods are multiple scales, Poincare’s small parameter, averaging, large parameters, and other numeric ones. In Ref. 13, the authors studied a new type for solving techniques of Euler–Poisson systems for the rigid body rotating problems around a fixed point. Different analytic solutions for the rigid motions are obtained in Refs. 14–19 using the aforementioned methods when the influence of a gyrostatic moment is considered. In Ref. 20, the authors introduced a case like Lagrange’s one for evaluating the motions of a body acted upon by unsteady moments. The controlled equations of motions for this case are considered in presence of new restrictions. New procedures of the solutions are given and analyzed. In Ref. 21, the authors admit the rotary motions around a point that is fixed in space by applying hypergeometric functions. They considered new analytic solutions (which are non-complex). They integrated the herpolhode problem. The authors in Ref. 22 formulated new conditions for important integrable problems of gyrostatic body dynamics. They solved the conditional cases and investigated the description of their motions. In Refs. 23–25, Elmandouh presented new problems for integrating dynamics of rigid bodies and particles with quadratic and cubic integrals in velocities. The authors in Ref. 26 studied the Hamiltonian techniques for integrability cases and chaotic problems in the dynamic of rigid bodies. In Ref. 27, the authors presented some of the mathematical procedures for solving many interesting problems of theoretical mechanics and celestial ones. Ismail in Ref. 28 solved the heavy solid problem for rotatory motions by applying a method of a large parameter. He found the system for the motion equations and their first integrals applying the method of a large parameter, in which the graphical representations for the obtained numerical and analytical solutions with their stabilities are presented. In Ref. 19, Ershkov found the solutions of a Riccati-type for equations of Euler–Poisson concerning rigid body rotational motions over its fixed point. The author in Ref. 30 investigated the torques that applied a gyro dynamical motion. The numerical results of the equations of motion for the considered case are obtained, in which the corresponding first integrals of these equations are obtained. Sahli studied in Ref. 31 the gyrostatic problem in cases of zero and non-zero torques for the rigid body motions. The case of slight displacement of the center of mass of the rigid body under the action of the gyrostatic moment vector is investigated in Refs. 32 and 33, in which the approximate solutions are obtained when the ratio of the body’s frequency becomes irrational. Some generalizations of modern problems of the rigid body classical systems are considered in Ref. 34. Kovalevskaya and Lagrange’s cases are considered in problems of rigid body dynamical motions.35,36 Leimanis presented in Ref. 37 some of the torqued general problems for the rigid body’s motions over its fixed points.
There are more relevant very important works focusing on different methods of approximate solutions of physical systems and mechanical ones. For example, the coupled and harmonic restoring force nonlinear oscillations and their stabilities analysis are studied in Refs. 38–42. The authors used some perturbed techniques like the rank upgrading one and presented approximated solutions and asymptotic investigations with stabilities properties for different problems.
Some latest methods of oscillations are studied in Refs. 43–45. The authors investigated the approximated solutions for some nonlinear oscillator problems using some perturbation techniques and numeric ones. An example of these techniques is the homotopy perturbation method and its modifications. Also, a variational principle is applied for some nonlinear oscillatory problems that come from micro-electromechanics models. In Refs. 46–49, the homotopy perturbation method and its modification are used to solve some problems for axial vibration for strings, the fractal Toda oscillator, and others. This method solved also the doubly clamped electrical actuated micro-beam-based micro-electromechanical systems.
This work presents the application of the large parameter technique50–52 for considering the disc problem motion under new initial conditions, in a new domain, and in presence of the gyro torque around one of the principal axes of the body inertia ellipsoid. Initially, we give the body a sufficiently low angular speed component about one of these axes (weak oscillation of the disc). In this case, we cannot use Poincare’s method for solving this problem as known previously because this technique depends on a small parameter, which depends on a high angular speed, that cannot be achieved here. The only road to exiting from this complicated problem is by achieving a large parameter and using it through the large parameter technique to solve the problem.1,28,50,52 The motion equations system is reduced, applying the first integrals, to a quasilinear independent one of 2 freedom degrees and 1 first integral. The analytic periodic solutions of the problem system are integrated and analyzed dynamically in presence of the first integrals of the motion. The resulted solutions are presented as new domain ones and considered as a generalization of the previous works. These solutions are drowned graphically to show the motion geometrical effect due to the body’s parameters. On the other side, the force order Runge–Kutta method is applied through a software program to find digital solutions for the autonomous system. The solutions are compared together. This problem has important applications in the aerospace engineering industry, and astronomy, for example, the radars, ship and airplanes stabilizers, satellites, racing cars, and pointing devices for the computer.
The problem considerations
Consider the rotary motion of a disc that is fixed at a point Describing the disc motion.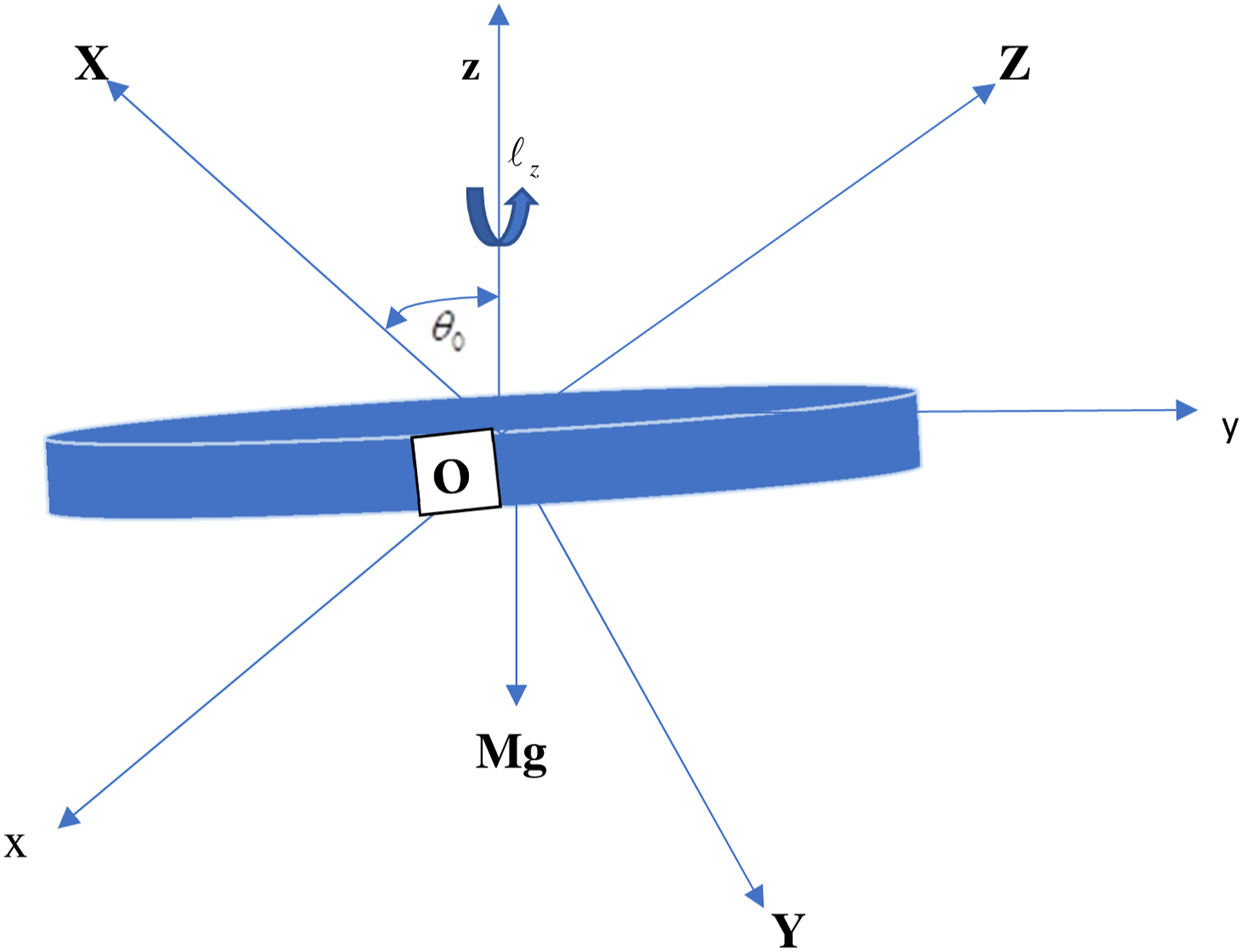
Taking into consideration that the disk rotates with a sufficiently low component
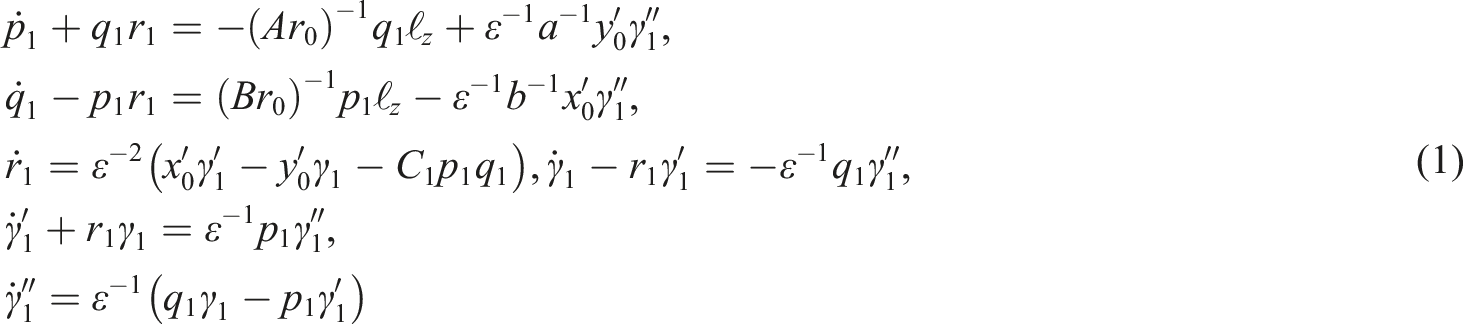


Here,
This problem admits the following first independent integrals


Making use of system (1) and equation (4), the following variables are obtained

Differentiating the equation number first and number four of a system (1), making use of equation (6), and considering



Solving the 1st and the 4th equations of system (1), and then making use of equation (6), we get

Replacing the variables

Using the relations (10), we get


We determine


Using the equations (12) and (13) into (6), we get

Substituting the equations (10)–(14) into (4), (7), and (8), we get


Constructing the analytic periodic solutions
We aim to construct the analytic periodic solutions of the system (15). The following initial conditions are admitted since the system (15) is an independent one

Based on Ref. 53, we note that the conditions (18) do not affect the required general solutions. The generated system (15) gives the analytic periodic solutions of the period

The constants

It is worthwhile to mention that

Let us define the functions


To determine the initiating functions

Using the equations (24) and (13), we get

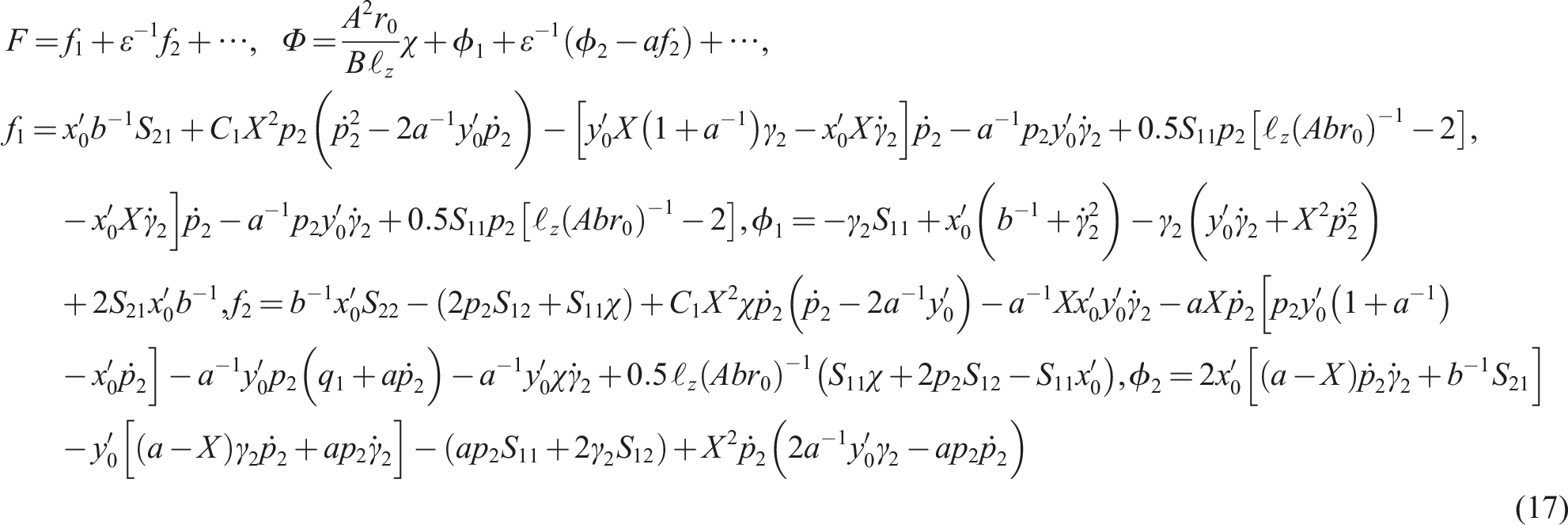
The substitution of equations (24) and (25) into (17), yields


The substitution of equations (26) and (27) into (23), yields

The integral (16) according to the conditions (21) when

Let

The solutions
29
give the following independent periodicity conditions

Making use of the equation (28), changing the constants


Making use of the equations (10), (11), (14), (20), (22), (24), (29), and (30), we get the required analytic periodic solutions and the period correction
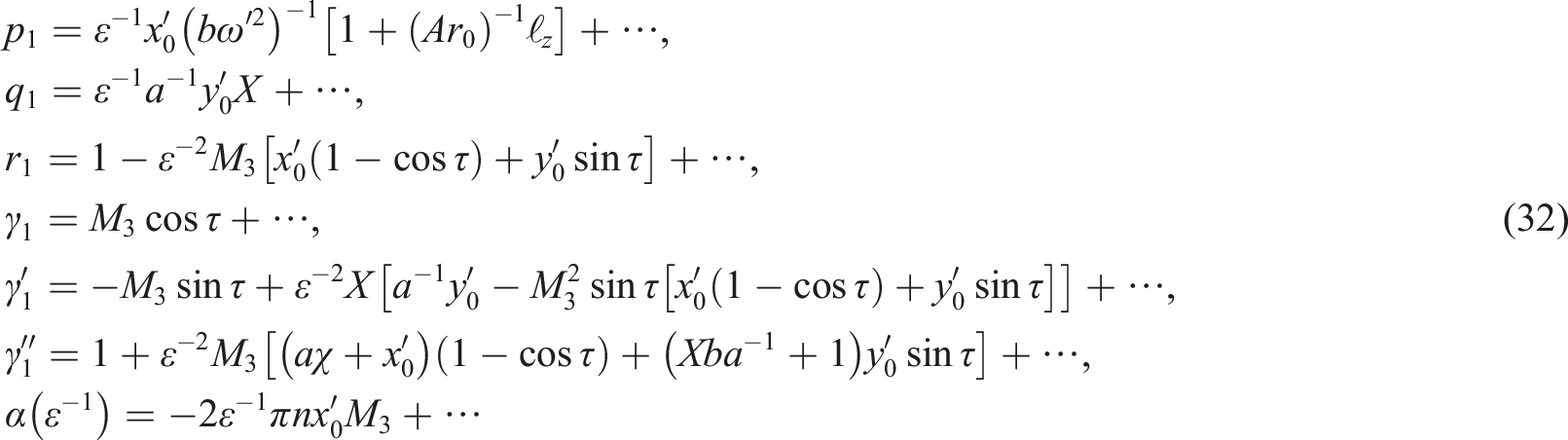
From these solutions, we note that the large parameter technique gives us the chance to study the problem of the rotational disc under the new condition when the initial rotation is slow while the frequency of the motion is high. The above solutions are obtained in the new domain for the angular speed and the parameter ε.
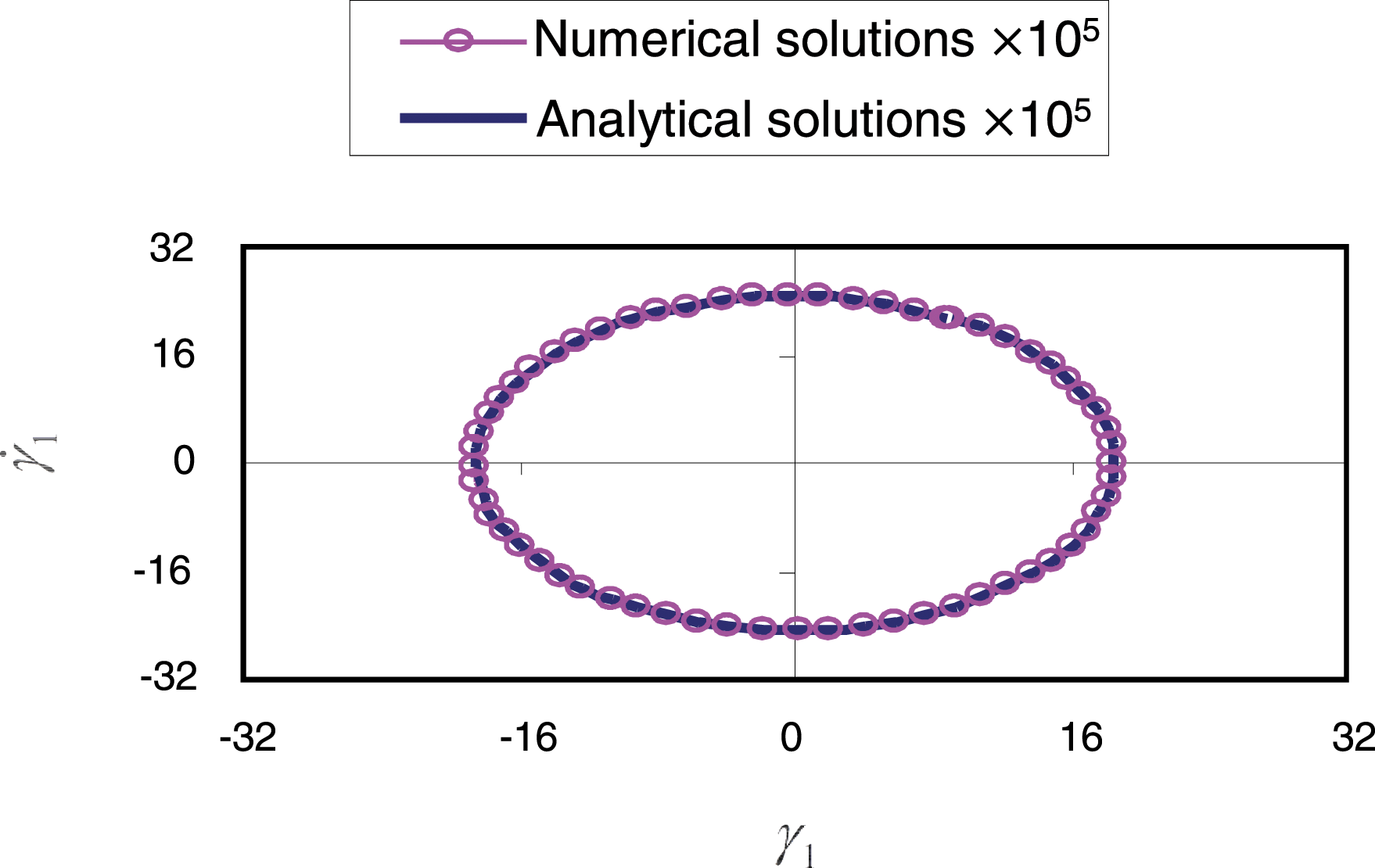
The numeric solutions
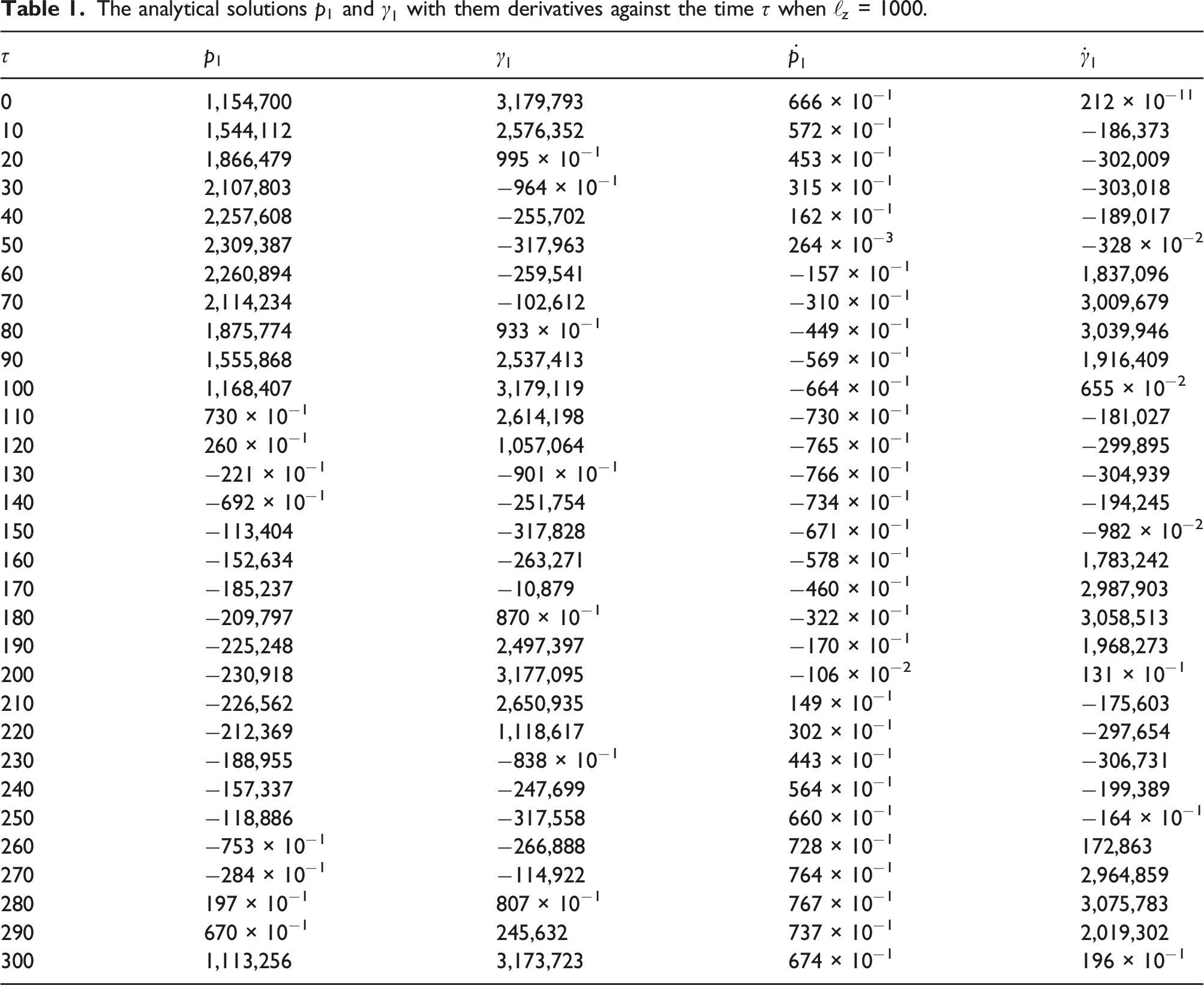
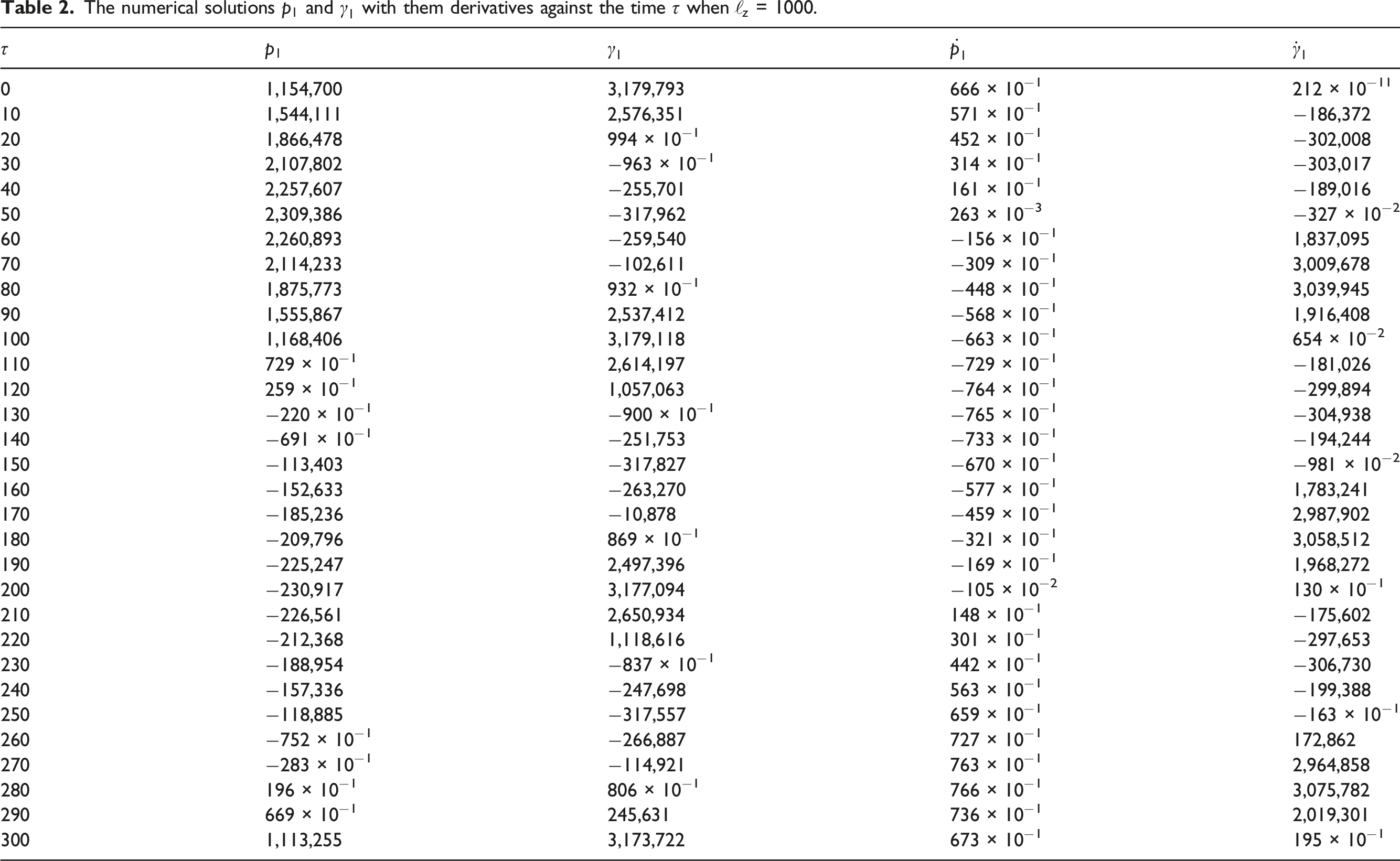
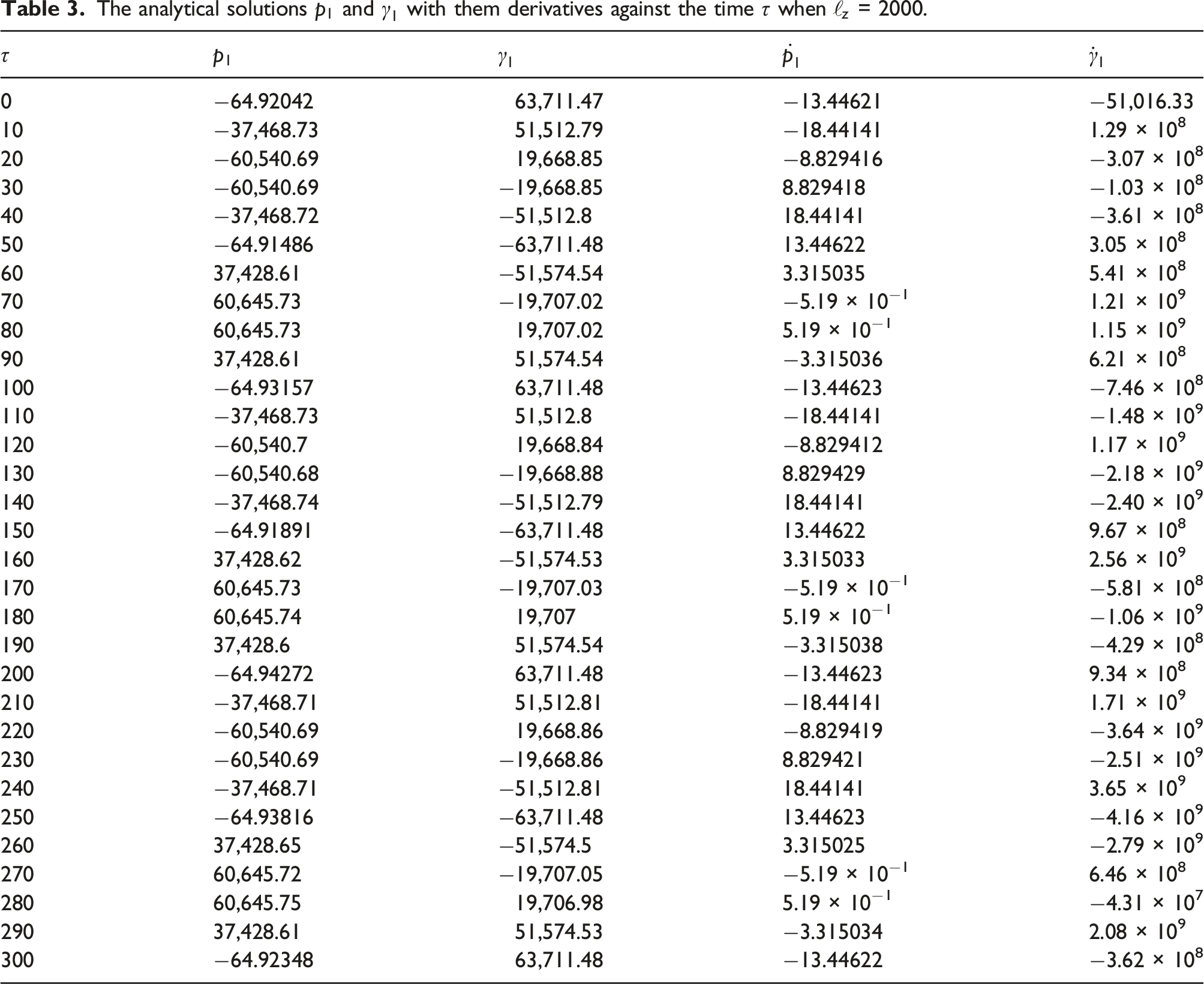
In this section, the numerical solutions of a system (1) are presented to check the validity of the obtained analytic solutions and to study the affection for the parameters of the body on the motion. Thus, to obtain the graphical representations and the behavior of both the analytic solutions and the corresponding numeric ones, we give a digital example as follows

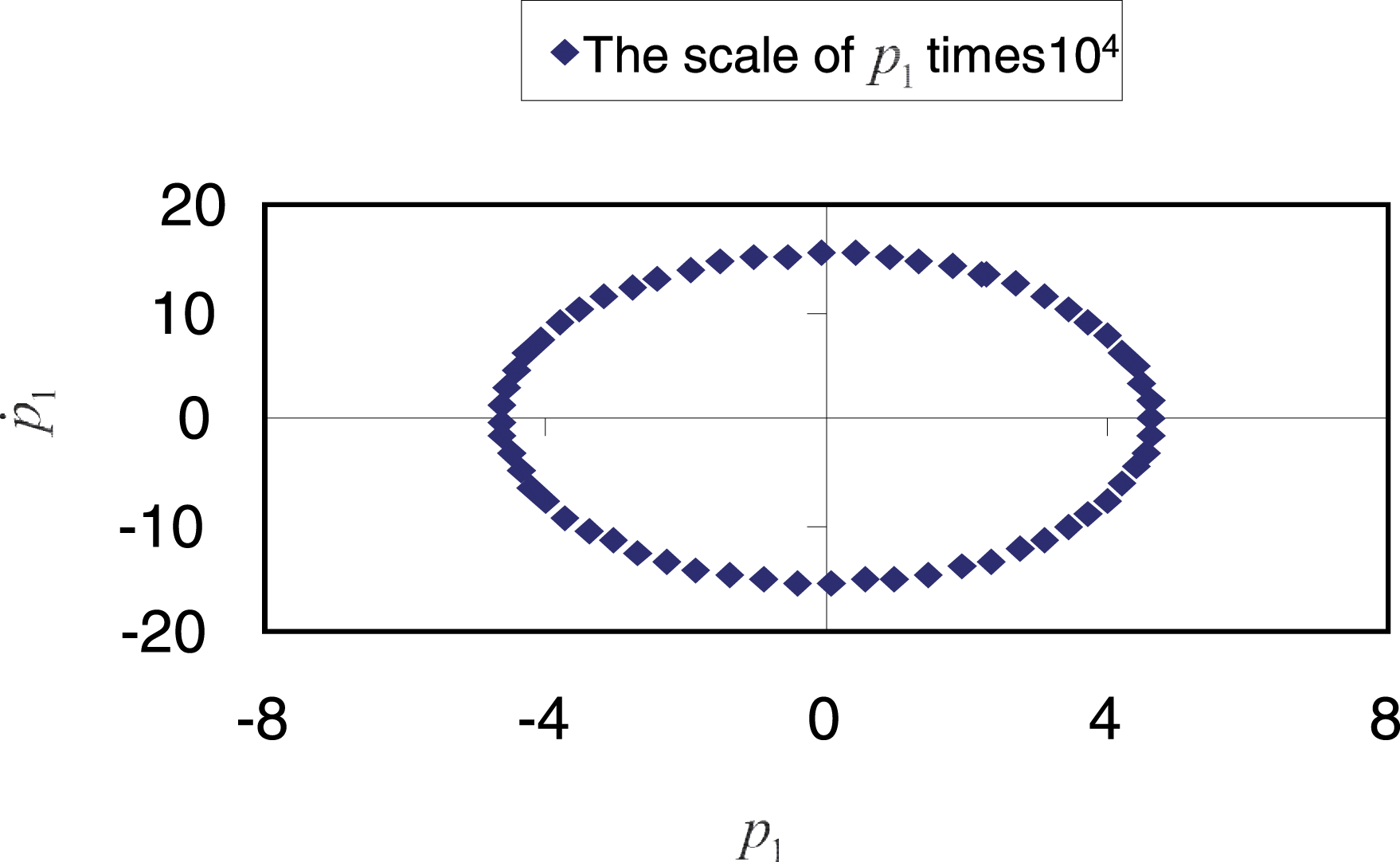
The analytical solutions
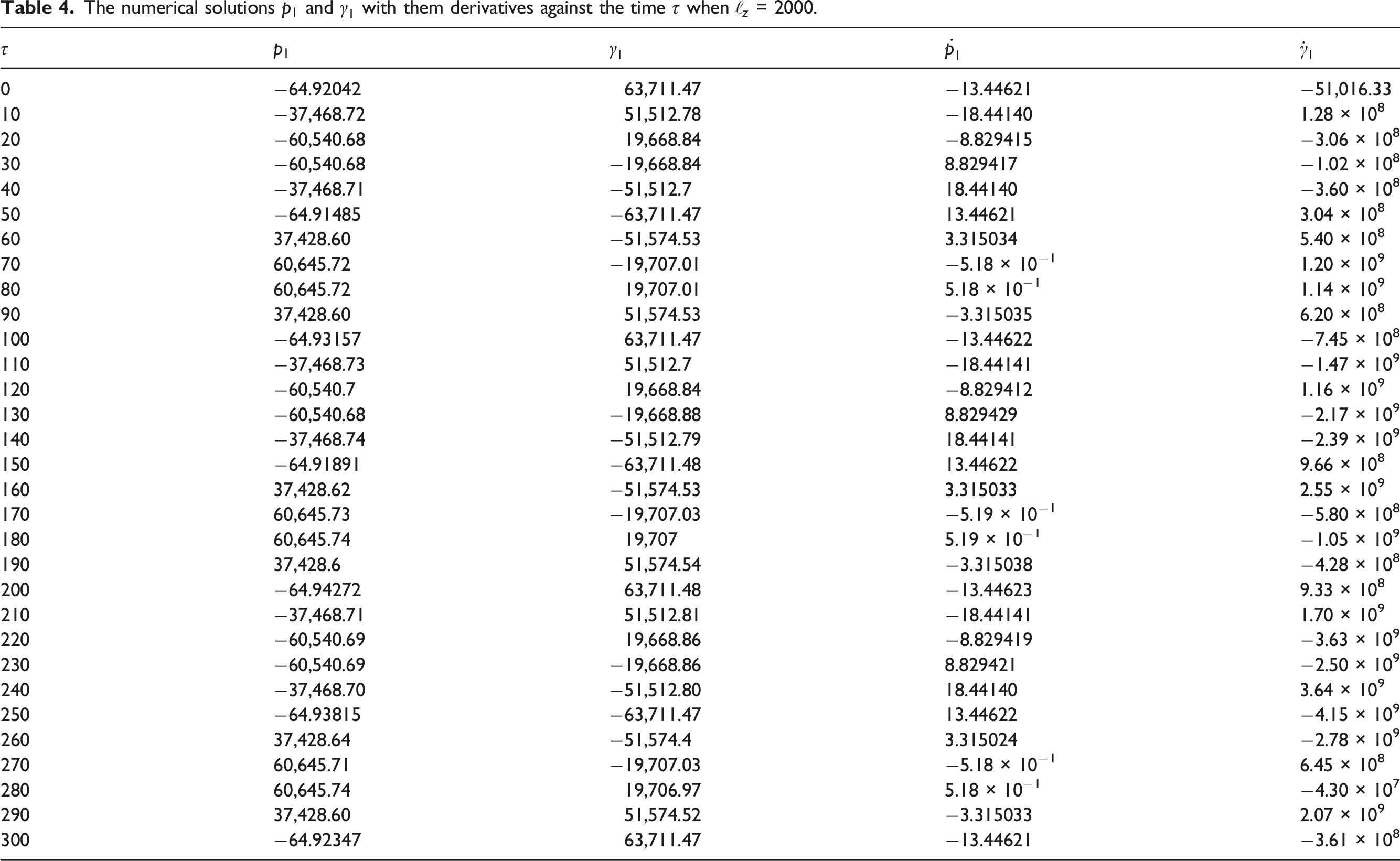
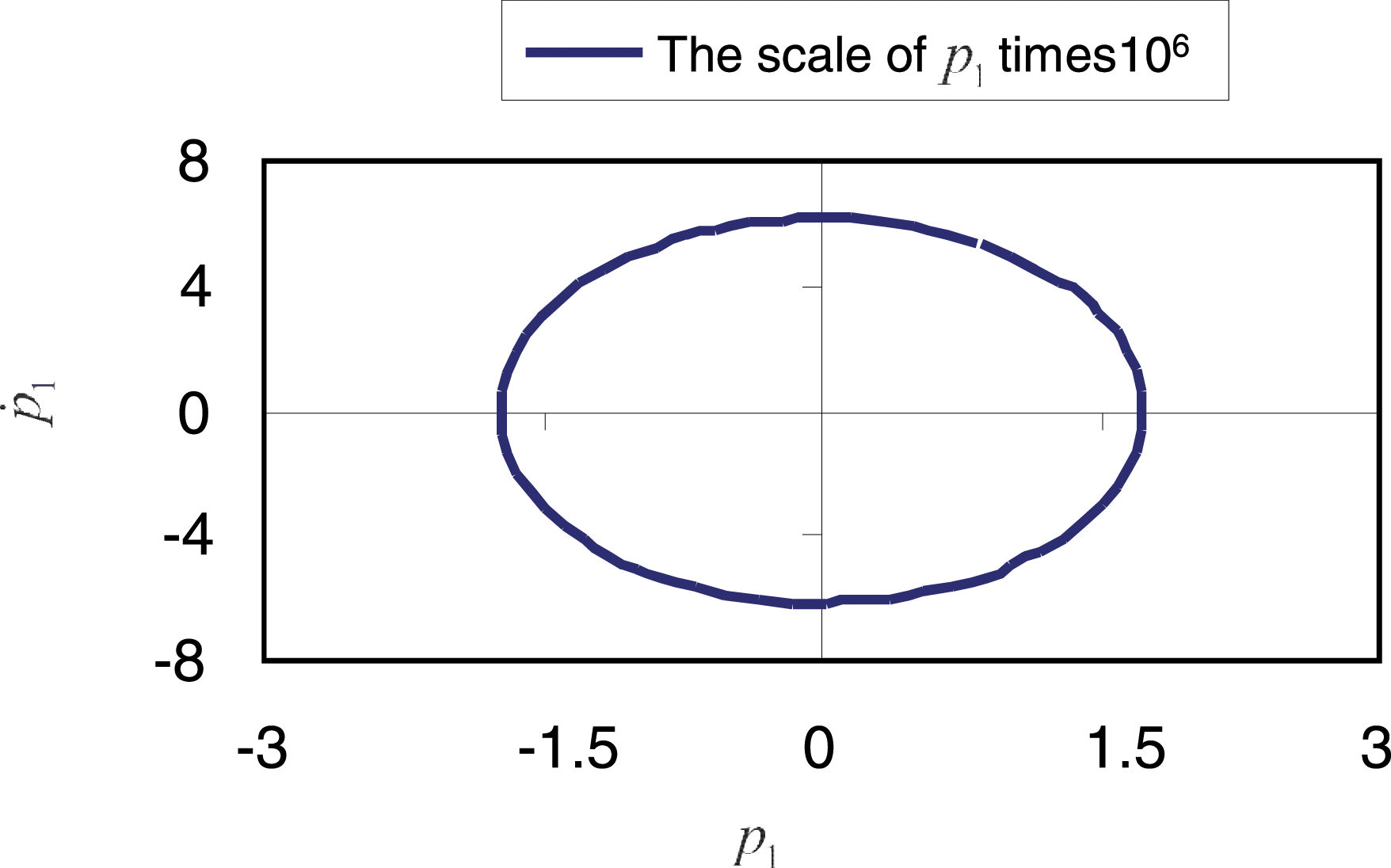
The numerical solutions
The analytical solutions
The numerical solutions
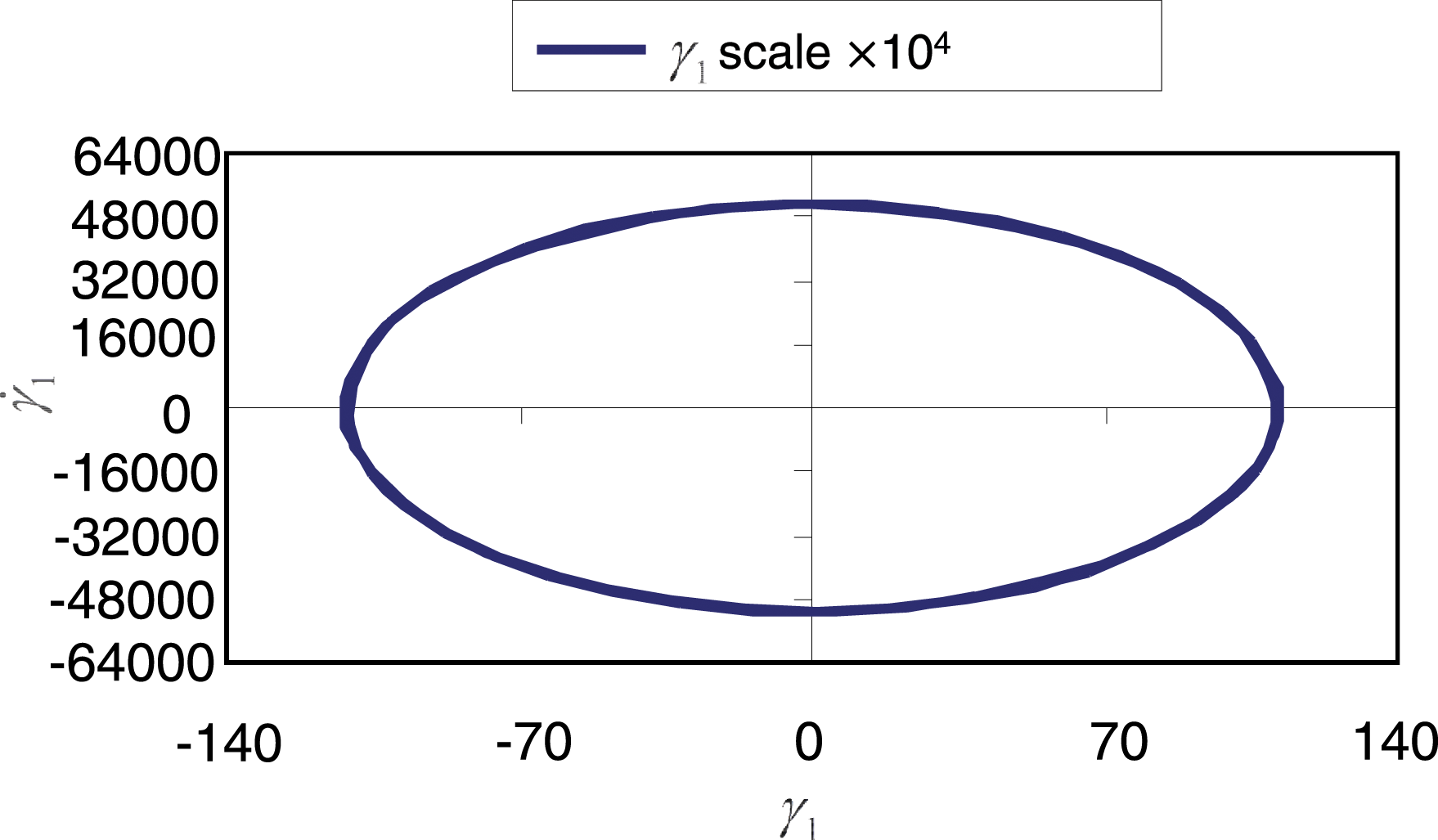
The stability diagram for
The stability diagram for
The stability diagram for
The stability diagram for
Conclusion
The rotary motion of a disc in presence of a gyro torque around one of its principal axes with a sufficiently small angular speed component about this axis is considered. The large parameter is achieved due to the smallness of the speed. The geometric integral, the energy integral, and the angular momentum one are obtained with the governed equations of motion depending on such parameter. The derived equations are reduced to two degrees of freedom independent system with aiding the first integrals and the large parameter. Then the three first integrals are also reduced to one independent integral. The large parameter technique is applied for obtaining the analytic approximated periodic solutions (32) for the reduced system. These solutions are reformulated by a computer program see Tables 1 and 3. The investigated solutions are dependent on the large parameter and the low angular speed which update the new domain of the solutions. This problem is considered a general one of such studies in the uniform gravity force field. The angle of nutation is considered a limiting case for this problem. A lot of singularities that appeared previously do not appear in this work due to the large value of the frequency depending on the torque. Using the initial values of the analytic solutions through a computer program depending on the disk parameters and applying the fourth-order Runge–Kutta method, we achieve numeric solutions see Tables 2 and 4. The stability of the attained solutions is investigated in phase plane diagrams through Figures 1–4. An example of the validity of the considered techniques is given in Figure 3. The initial energy required for initializing the motion is very small due to the low initial angular velocity. This problem has many applications in gyros, radars, dynamics systems, satellites, astronomy, aerospace engineering, and many physic and geometric applications. For example, from the recent applications which are useful in this field of study in gyro’s dynamics, the gyroscope system, the flexible rotor’s motion, and their chaos synchronization represent new directions for these works.55,56
Footnotes
Acknowledgements
The authors would like to thank the Deanship of Scientific Research at Umm Al-Qura University for supporting this work by Grant Code: (22UQU4240002DSR06)
Author Contributions
All authors have the same contribution to this manuscript.
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This work was supported by the Deanship of Scientific Research at Umm Al-Qura University.