
Abstract
With the development of chaos theory, Duffing oscillator has been extensively studied in many fields, especially in electronic signal processing. As a nonlinear oscillator, Duffing oscillator is more complicated in terms of equations or circuit analysis. In order to facilitate the analysis of its characteristics, the study analyzes the circuit from the perspective of vibrational science and energetics. The classic Holmes-Duffing model is first modified to make it more popular and concise, and then the model feasibility is confirmed by a series of rigorous derivations. According to experiments, the influence of driving force amplitude, frequency, and initial value on the system is finally explained by the basic theories of physics. Through this work, people can understand the mechanisms and characteristics of Duffing oscillator more intuitively and comprehensively. It provides a new idea for the study of Duffing oscillators and more.
Introduction
Chaos theory was first proposed by Lorentz, who found the butterfly effect in the simulation of Earth meteorology. After long-term continuous development, chaos theory has been widely used in communication, electronics, and economics. Yao used it for the manufacturing of nanoscale non-smooth fibers, and Chun-Hui used it for water collection.1,2 As a typical second-order chaotic oscillator, Duffing oscillator has attracted extensive attention for its rich motion, especially its sensitivities to the initial value, coefficients, and inputs. Holmes simplified the parameter and obtained Duffing-Holmes oscillator with complex chaotic behavior. 3 He also made a corresponding physical model and confirmed its characteristics. People use this oscillator to detect weak signals.4–6
However, the analysis of beam structure requires a certain mechanical foundation.7–11 Since many people are not professional, they often study it only from the perspective of equations or circuits and cannot clearly understand its mechanism. It is necessary to transform it into a popular and concise model.12,13 On this basis, X. Yao and J. He used the homotopy perturbation method and numerical methods for analysis.1,14 He CH et al. and He JH et al. studied the low frequency characteristics of a fractal vibration model and the frequency–amplitude characteristics of a fractal oscillation, respectively.15,16 This study studies the Duffing oscillator from the perspective of mechanics.
Duffing oscillator study from the perspective of mechanics
Due to the special superiority of Duffing oscillator in the detection of weak electric signals, it is studied from the perspective of equations or circuits.17,18 There are also studies from the point view of fractal theory.19,20 However, they ignore that the essence of Duffing oscillator is a nonlinear elastic system, and the Duffing oscillator is analyzed from the perspective of mechanics.21,22
Origin of Holmes-Duffing oscillator
Generally, the restoring force of a one-dimensional elastic system is23–25

Some systems are not linear, and their elastic potential energies are symmetric

Equation (2) is also the simplest form of symmetric elastic potential energy in all nonlinear elastic systems. It corresponds to the motion equation of the elastic system

Due to the resistance in actual movement, the simplest form of it is proportional to the velocity, namely,

Considering the existence of periodic external force, the forced Duffing oscillator equation is obtained. The dissipative system with extrinsic motivation is as follows

Simplify the above parameters, let

For equation (6), Holmes has given a concrete mechanical model and a detailed proof. As shown in Figure 1, the slender steel is fixed on a bracket and the bottom is located in the middle of two permanent magnets. This system model corresponds to equation (4), and there is an unstable equilibrium in the middle, accurately at Holmes-Duffing classic physical model.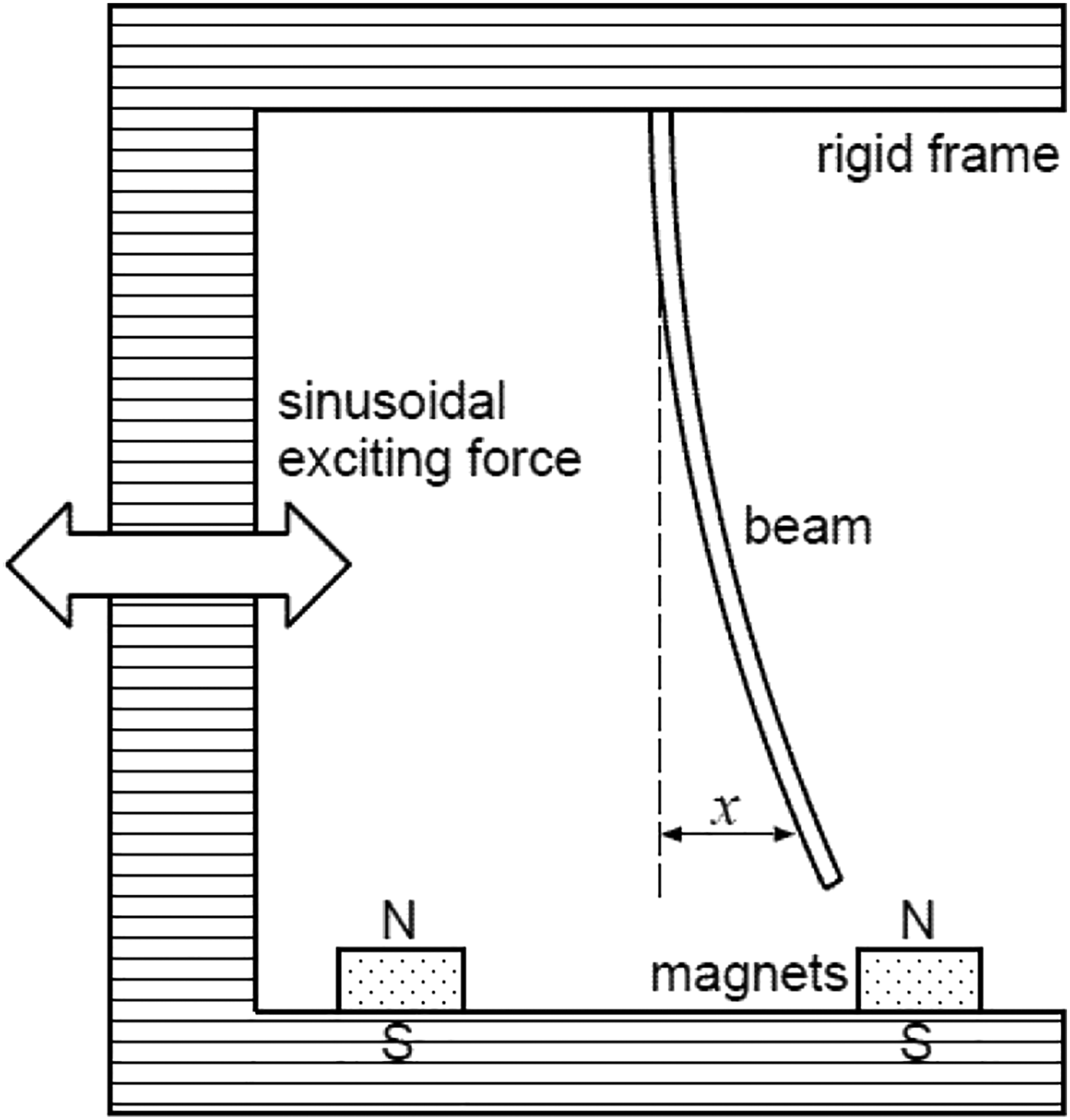
Modified model of Holmes-Duffing oscillator
This classic model is in full compliance with Duffing’s equation, and the oscillatory structure of the beam makes it unconcise and unpopular. Therefore, the beam oscillator is converted into a one-dimensional spring oscillator, as shown in Figure 2. Improved one-dimensional spring model of Holmes-Duffing.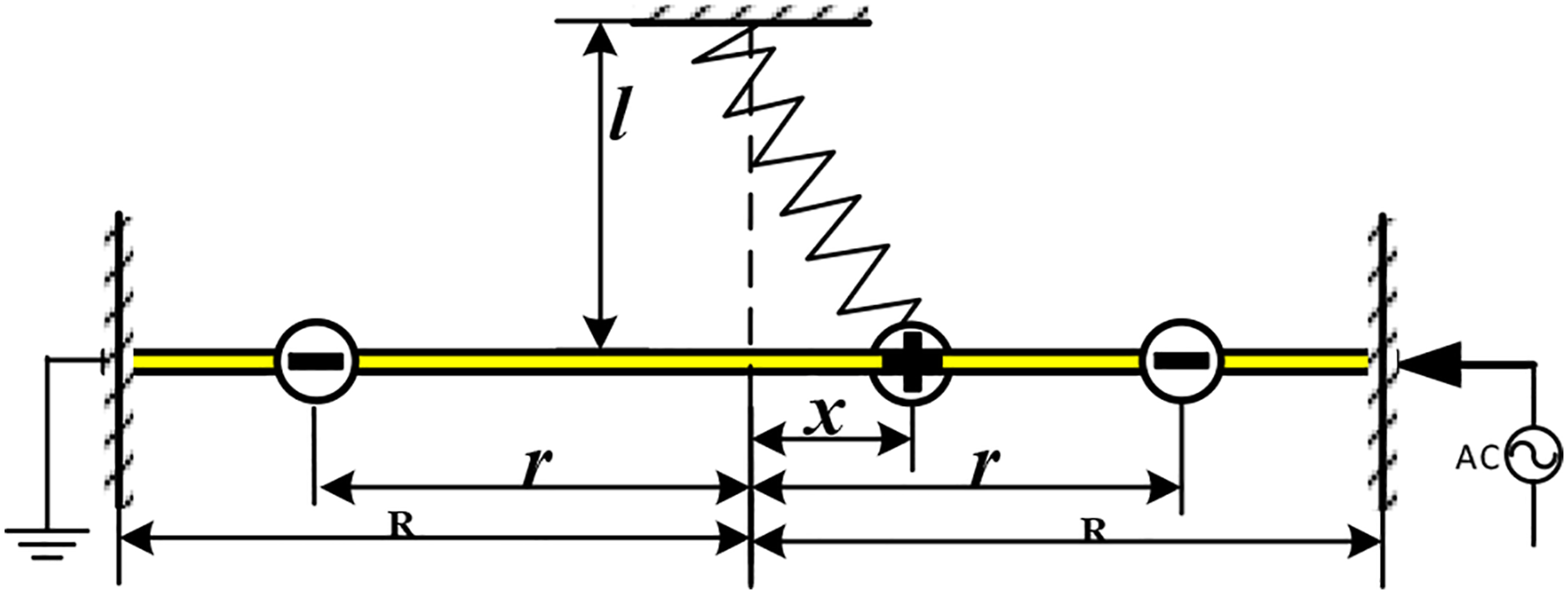
The spring top is connected to a high fixed point as shown in Figure 2. Its original length is The spring restoring force is first analyzed. Lin has analyzed the nonlinear vibration of spring oscillator.26,27 When the initial state of the oscillator is (0, 0), the kinetic energy of the spring is



Lagrange equation is used as


This is the equation of spring restoring force, and the fraction item is expanded by Taylor series

Take the first two items as example 2. The Coulomb force is analyzed. Since the three charges are in a straight line, the Coulomb resultant force of the oscillator is affected by two negative charges


Similarly, expand the fraction items by Taylor series



Simplify and remove the high-order items 3. The simplest is the damping force that positively related to the speed 4. For the electric field force



From the above, there is


Influence of system parameters
After the beam oscillator is converted into an easy-to-understand spring oscillator, the amplitude, frequency, and initial phase of the driving force have a more obvious impact on the entire system. Based on Figure 2 and related experimental data, the initial value of the system is (0, 0), the drive frequency is 1, and the initial phase is 0.
Effect of driving force amplitude on the system
Duffing equation double potential well.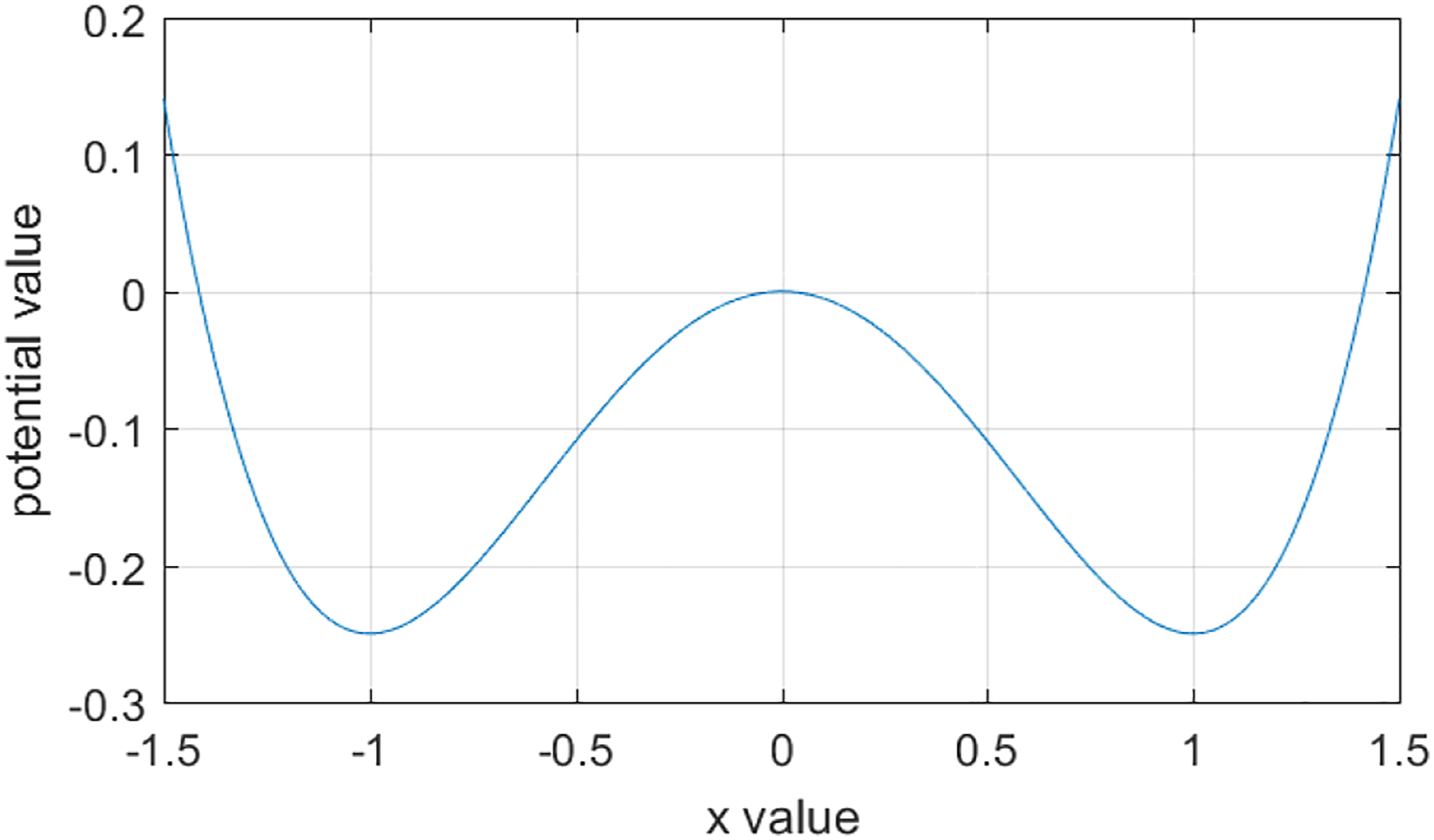
When Different motions corresponding to different amplitudes. (From the left to end, the corresponding Fd are 0, 0.1, 0.343, and 0.4, respectively)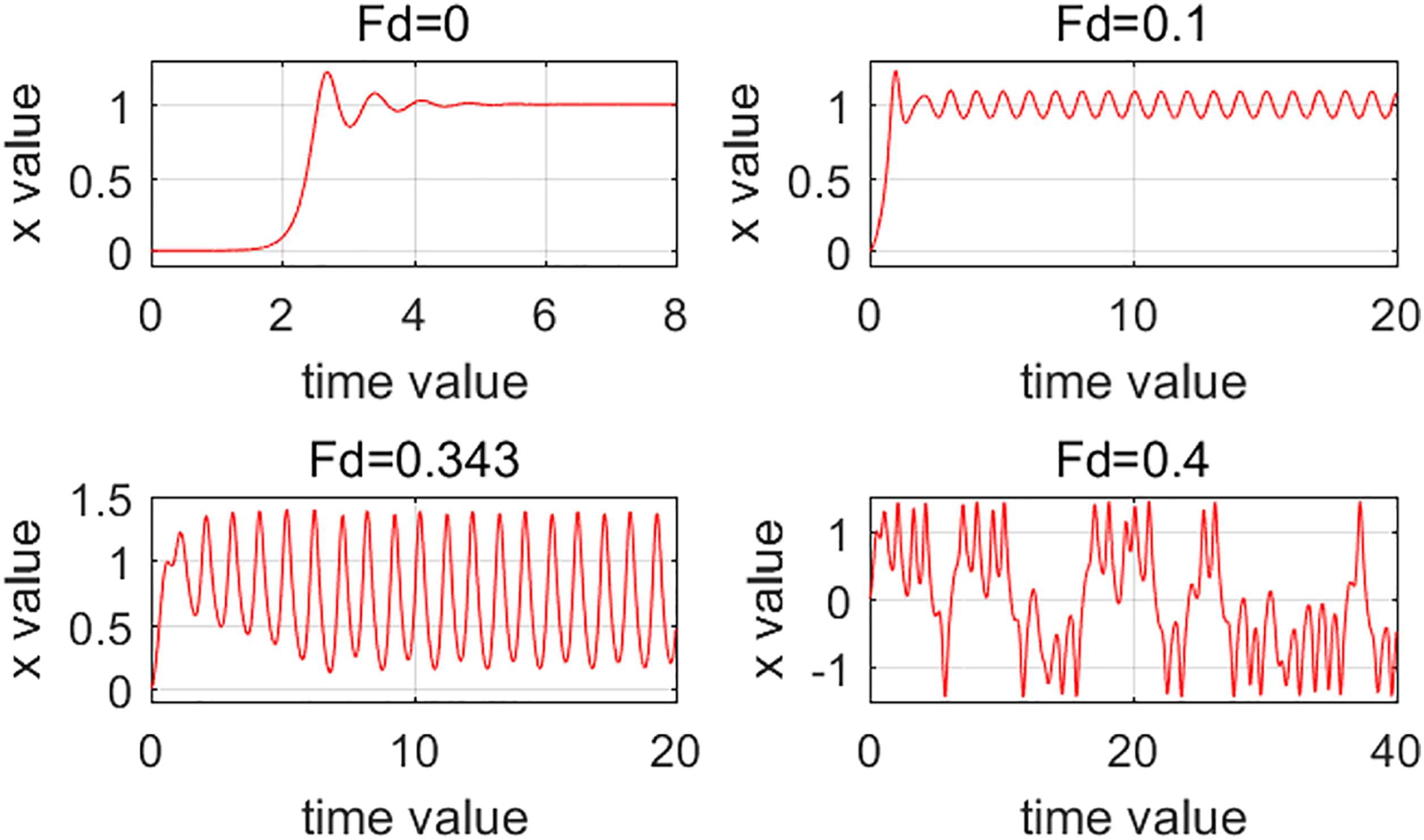
Compared with the internal force of the system, the continuous increase of
Then the system enters the period-doubling bifurcation state. With a further increase of
Continually increase Temporal and phase printing of large period.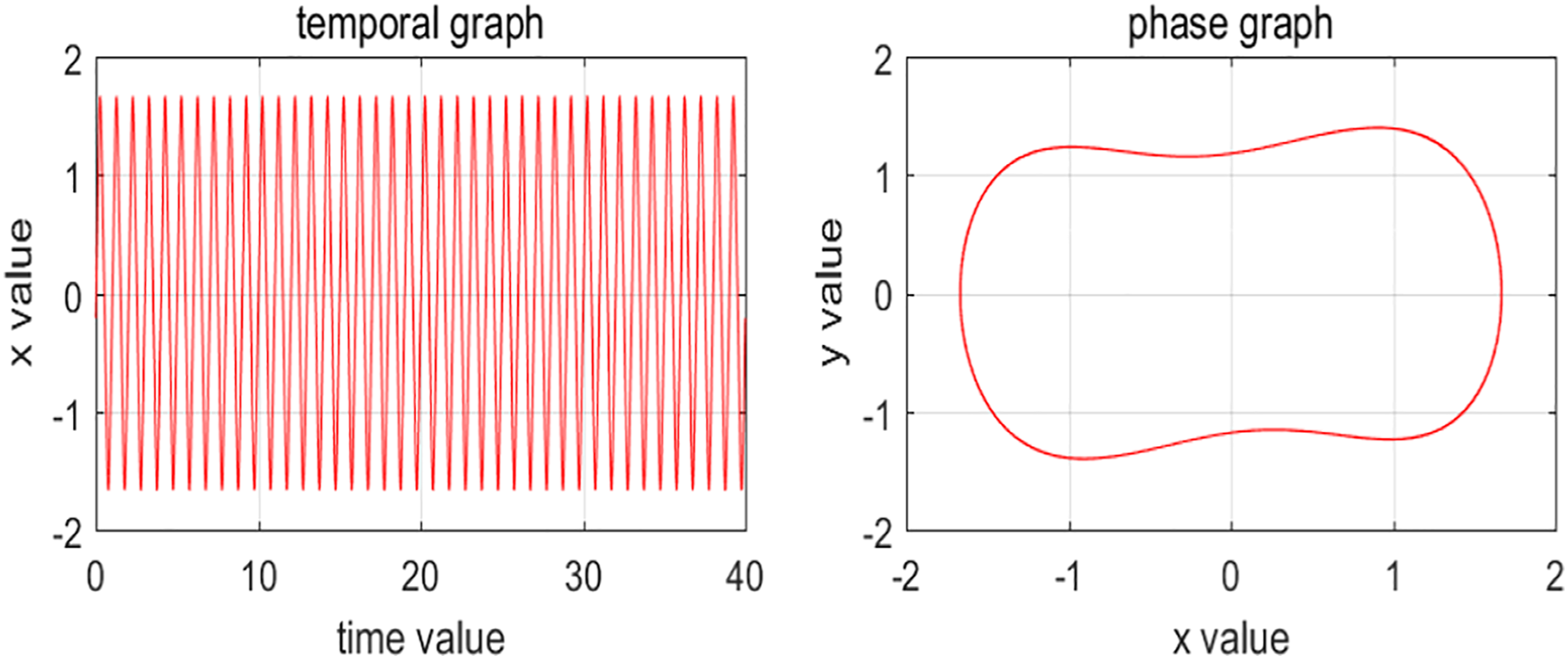
When
The results show that the input energy is the decisive factor that determines the final state of the oscillator, which is determined by the external driving force
Effect of driving force frequency on the system
The frequency of the driving force indirectly affects the amplitude or energy of the oscillator. In a one-dimensional linear spring oscillator, when the ratio of two frequencies (the driving forces frequency and the natural frequency of the system) is high, the amplitude of the oscillator will be affected. This is because the driving force changes too fast and the corresponding displacement do not have enough time to change under the inertia. 5 Since the nonlinear oscillator does not have a certain inherent frequency, it has a familiar characteristic. The strength is constant, and the oscillator amplitude decreases to the fast frequency of the driving force. To avoid the interference of frequency and amplitude, factor w is used to modify the equation.
The modified equation

The corresponding state of the equation

Effect of system initial value on the system
The driving force directly determines the energy input and motion state of the oscillator. The initial value also has some influence on the oscillator. When the driving force is weak, the initial value will affect the potential well of the oscillator. When the driving force becomes strong, the oscillator supports the chaotic motion between two potential wells. The initial value corresponds to a trajectory and contains the main characteristics of chaotic motion. If the driving force is very strong, the initial value will affect the transition time. For example, when Different transition time under different initial values. The first figure corresponds to the initial value [0, 0], and the second corresponds to [−0213, 1.155]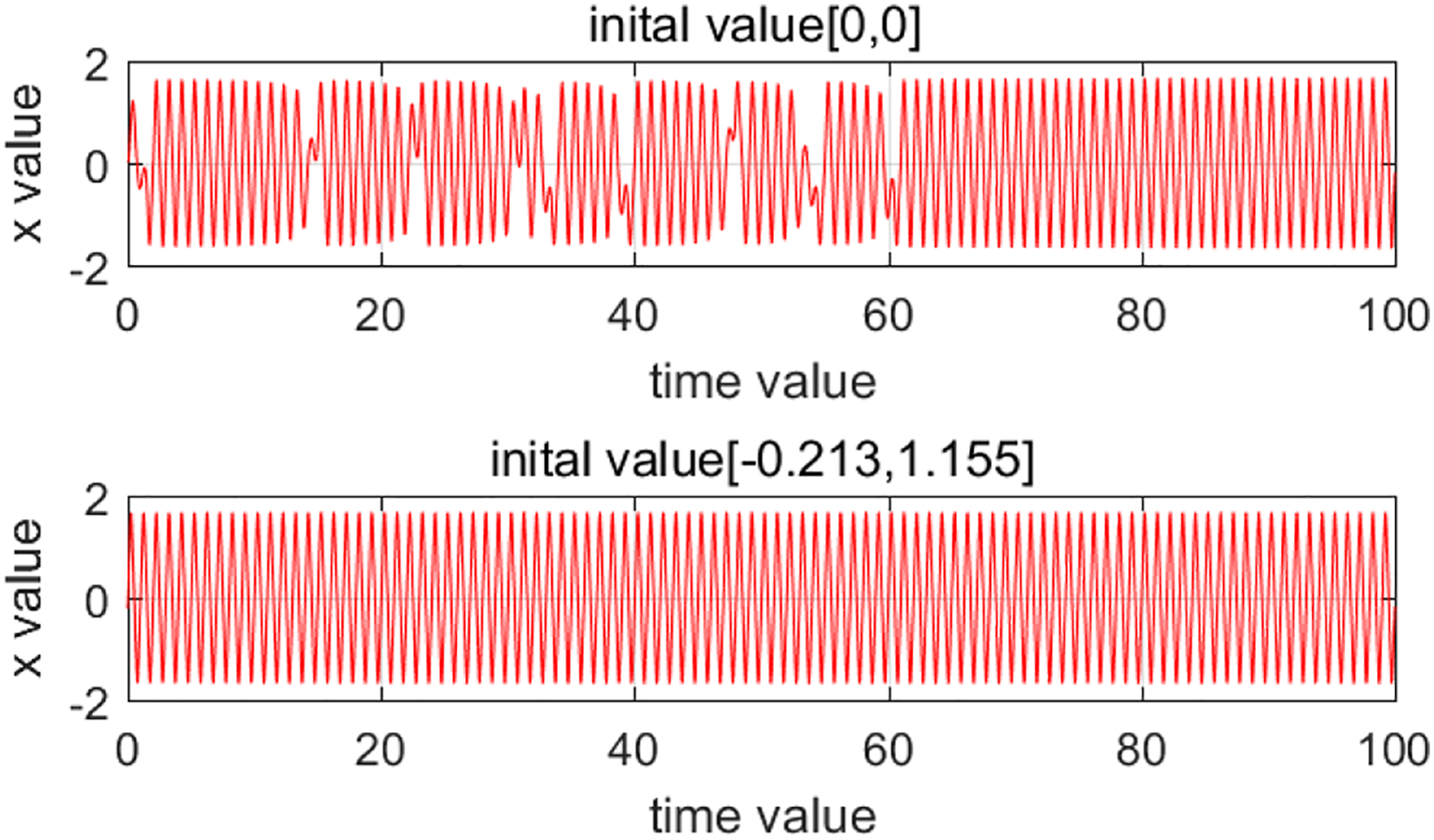
Classification and characteristics of system state
Generally, the solutions of the system are divided into four categories: constant solutions, periodic solutions, quasi-periodic solutions, and chaotic solutions. The focus of this study is to determine whether the system is in a periodic state, and constant and quasi-periodic solutions are not involved. Therefore, these two categories are not discussed in detail. In addition to the study of the periodic state and the chaotic state, a special alternating state between the periodic and chaotic states is also found in the double-excited Duffing oscillator. The alternating state is called the intermittent periodic state (also known as intermittent chaotic state).
The dynamic behavior analysis explains the above states as follows: The system in a periodic motion state: The total input energy is sufficient to dissipate the energy consumption of the periodic motion of the system. Therefore, regardless of the initial value of the system, the state can always be adjusted to the periodic state under the total driving force. At this point, the energy dissipated by the damping will be equal to the total input energy, and the system will maintain the periodic motion. The system in a chaotic motion state: The input energy is insufficient to meet the periodic motion of the system or exceeds the adjustable tolerance range of the system. Regardless of the initial value, due to imbalanced energy input and output, the system cannot stably move periodically, leading to disordered motion of the system, that is, the chaos. The system in an intermittent chaotic state: The input energy is sometimes sufficient to meet the periodic motion of the system, and sometimes not. For example, when the input is a weak periodic signal and a periodic driving force, there is a fixed frequency difference between them, so that the total input amplitude changes periodically. The output of the system will change intermittently from periodic motion to chaotic motion.
From the classic criterion of chaos, Poincare section 12 : When the system is in the periodic motion state, it will always traverse each point on the trajectory in one cycle, and the phase corresponding to each point is fixed. Therefore, the driving force period is regarded as the sampling period, and the Poincare section is obtained. A series of points on the Poincare section should overlap on the same point or be distributed in a small neighborhood. When the system is in chaotic motion state and the sampling period is the same, the Poincare section points are considered to be widely distributed throughout the attraction basin even though the system no longer moves periodically.
Quantitative determination of chaotic state
Deviation mean square judgment method based on Poincare section
The above discussion indicates that the quality of the system state directly determines the quality of detection. Thus, an efficient and accurate determination method is important. Poincare sections of the system under different states have great differences in the dispersion of sample points. Therefore, the mean square of variance of the sample points can be used to determine the different states of the system. Due to periodicity, in the periodic state, the distances between points are extremely small, and the mean square of deviation is also extremely small, close to 0. In contrast, the sampling points in the chaotic state are relatively scattered, so the mean square of deviation will be large, which is several orders of magnitude different from the former. Theoretically, the chaotic points in the intermittent periodic state should be half of the chaotic state, and their values should be approximately equal to the arithmetic mean of the other two states. In terms of numerical characteristics, the logarithm of chaotic and intermittent periodic states is close to each other, and it is significantly different from the logarithm of periodic state. Therefore, the method of determining the periodic state of the system is highly accurate. When a weak signal is detected, the system should be in a critical period state firstly. If a weak signal is input inversely and the resultant force is reduced, the system is unable to maintain a large periodic state. When the weak signal and driving force signal are at the same frequency, the system will be chaotic. However, if there is a small frequency difference between them, the system will enter an intermittent periodic state. The mean value of the deviation will rapidly increase under the two states to achieve signal detection.
Decision process
The initial value of the system is set to ( The phase diagram adopts a fixed-period stroboscopic sampling method, and the same sampling period is the same as the system input strategy period, that is 3. The number of fixed sampling points is 4. Through experiment, the critical point of different states of



When
When
Selection of decision points
The selection of decision points is vital when the intensity of sampling points is calculated. For decision points of different lengths, the computational complexity and processing efficiency are different. Moreover, the selection of decision points will directly affect the accuracy of the final decision. In principle, only two points are needed to obtain the result, that is, the two points are the same as the periodic state and different in the chaotic state. In order to improve the accuracy, the selection of N points is discussed here.
The periodic and chaotic states have obvious characteristics. The intermittent chaotic state is periodic and chaotic, and it is easily misjudged. Therefore, the selected points should be at least equal to the change of intermittent period
Calculation algorithm and threshold
In view of the nonlinearity and computational complexity of Duffing equation, simulation experiments are necessary to obtain numerical solutions. The fourth-order Runge–Kutta method is thus used in this experiment. Considering that the computer may lose some special points when the step length is uncertain and point control is difficult, the experiment adopts fixed step method for sampling. The sampling frequency is set to an integral multiple of the driving force frequency to ensure that each sampling point has a calculated value.
Different systems correspond to different fixed thresholds. In order to reduce the accidental errors and increase the accuracy, multiple experiments are conducted prior to the formal experiment to determine the threshold.
The driving force amplitude of a specific detection system is first adjusted to
Algorithm complexity analysis
Since the algorithm only takes the points from the

It can be seen from equation (28) that this algorithm only uses
Intelligent detector for weak signal
Experimental design and premise
Li et al. showed that when the detection threshold was 0.825, the detection accuracy is 0.001.
30
Therefore, the driving force amplitude is set to 0.825. Without affecting the experimental conclusions, the initial phase of the driving force is set to be 0,
System states and values of
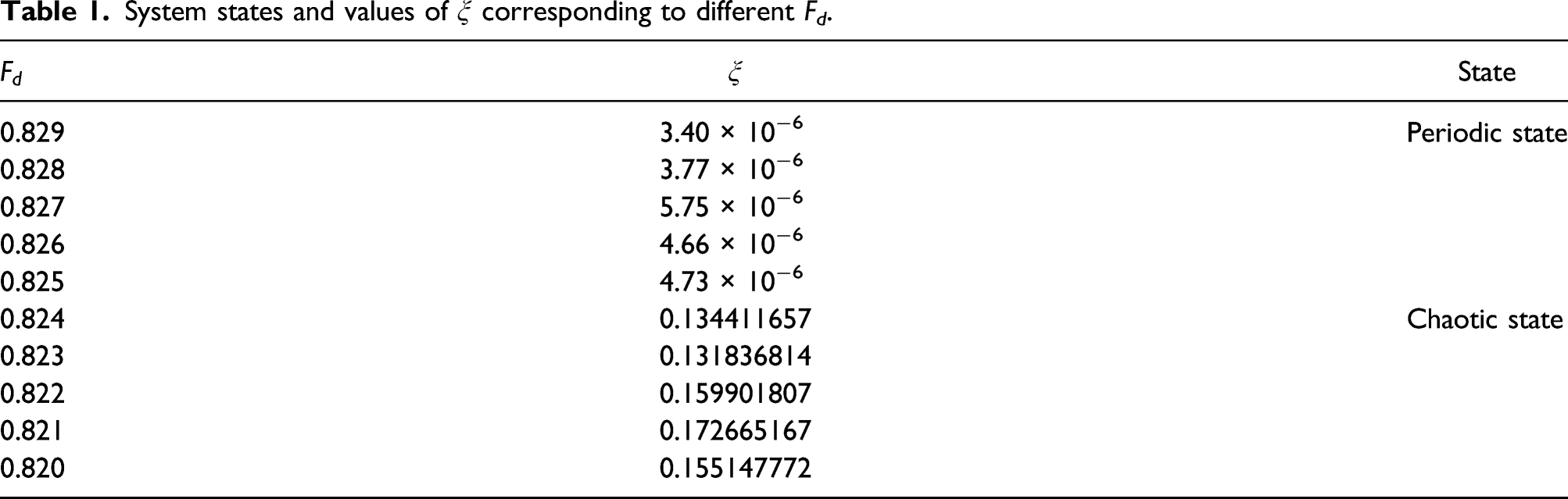
Table 1 shows the change of
The Duffing oscillator has strong immunity to zero-mean noise. 13 Under most natural conditions, the system noise is zero-mean white noise. The noise is thus temporarily ignored in the experiment, and only the influence of a single-frequency strategy on the system is considered.
Intelligent weak signal detection model
According to the above design, the corresponding intelligent weak signal detector is shown in Figure 7. Proposed intelligent weak signal detection model.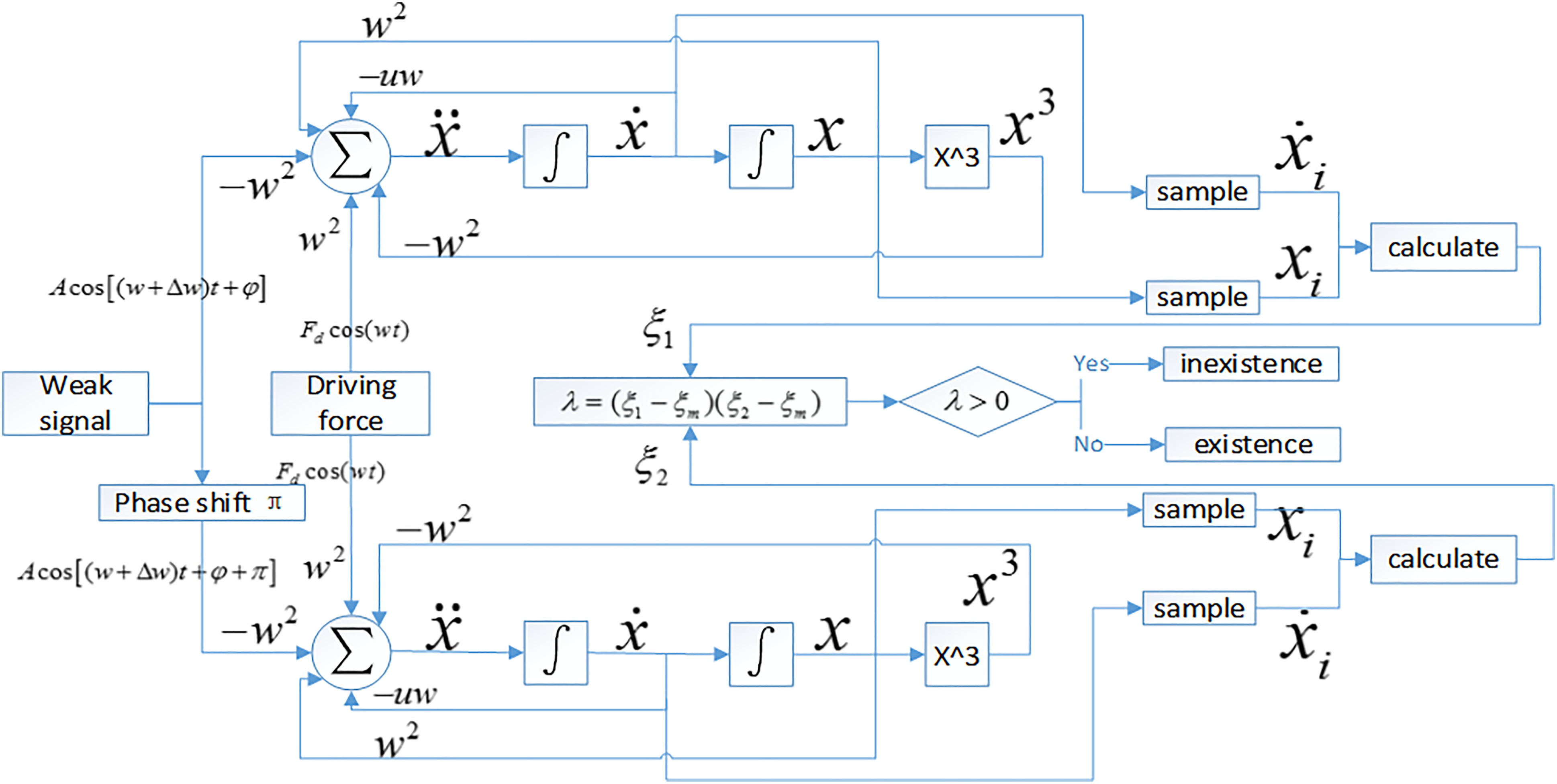
The detection process in Figure 7 is divided into three parts: Once the input signal is completely copied, it is split into two parts. One part is directly added to the driving force and then enters the chaotic system. The other part moves through After a series of calculation modules, If one of
Experimental verification
In this section, the single variable method is used to verify the effects of weak signal amplitude, initial phase, and frequency on the detection. Amplitude factor: The driving force parameter is first initialized. The initial phase Different values of
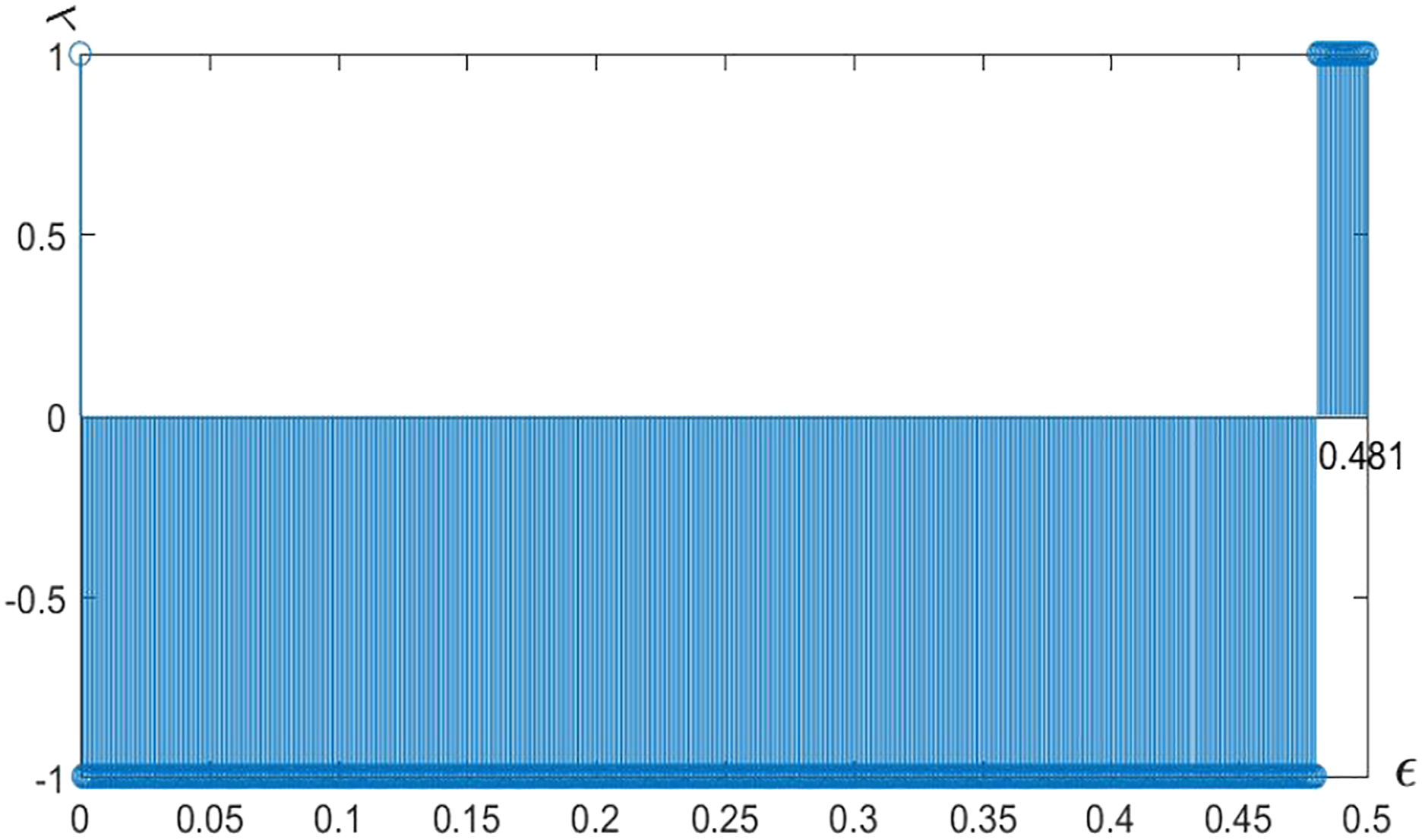
In Figure 8, when 2. Phase factor: The driving force parameter is initialized and the weak signal amplitude Different
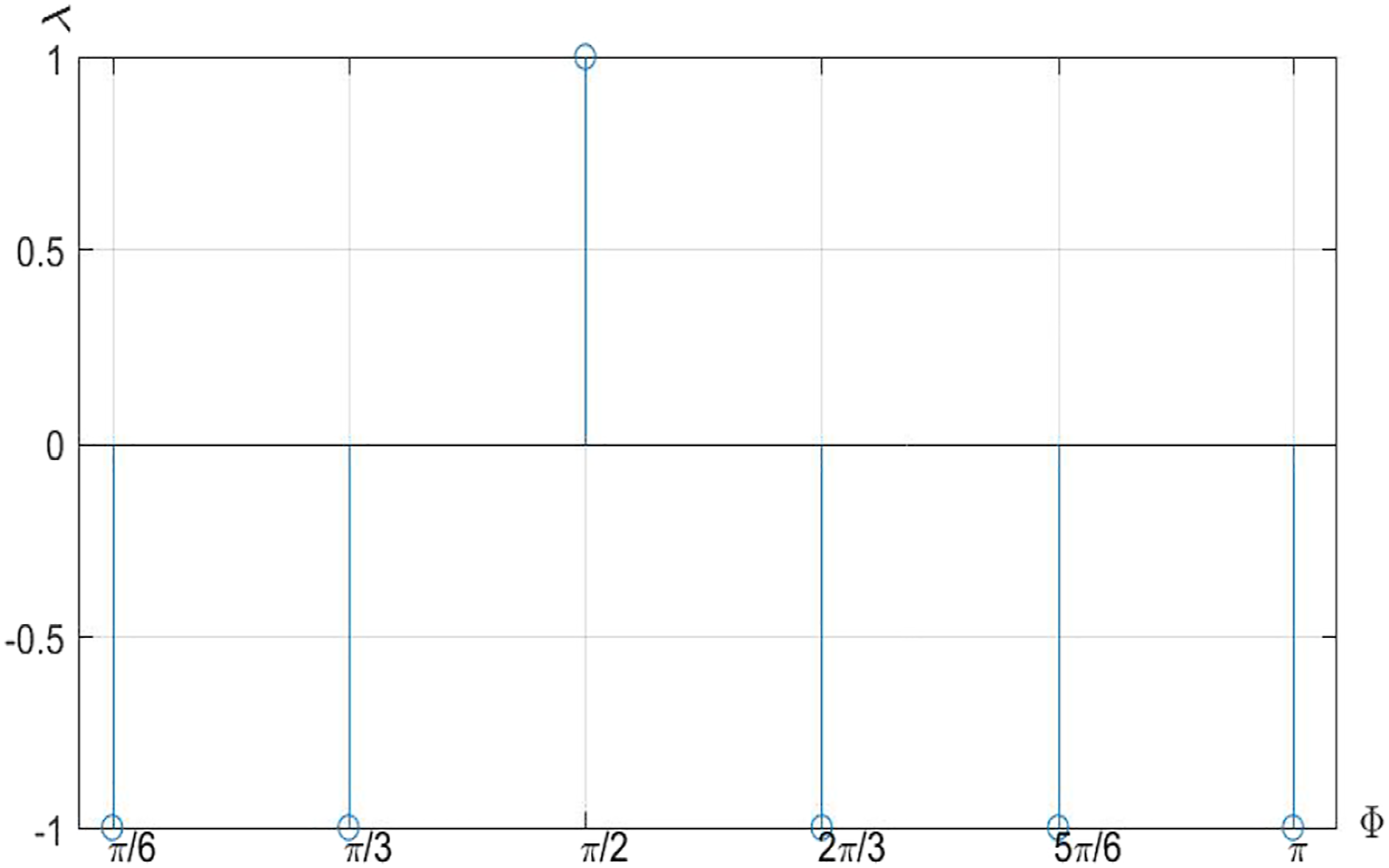
In Figure 9, the phase is in the detection dead zone only when the phase is 3. Frequency factor: Firstly, the driving force parameter is initialized and the weak signal amplitude Values of
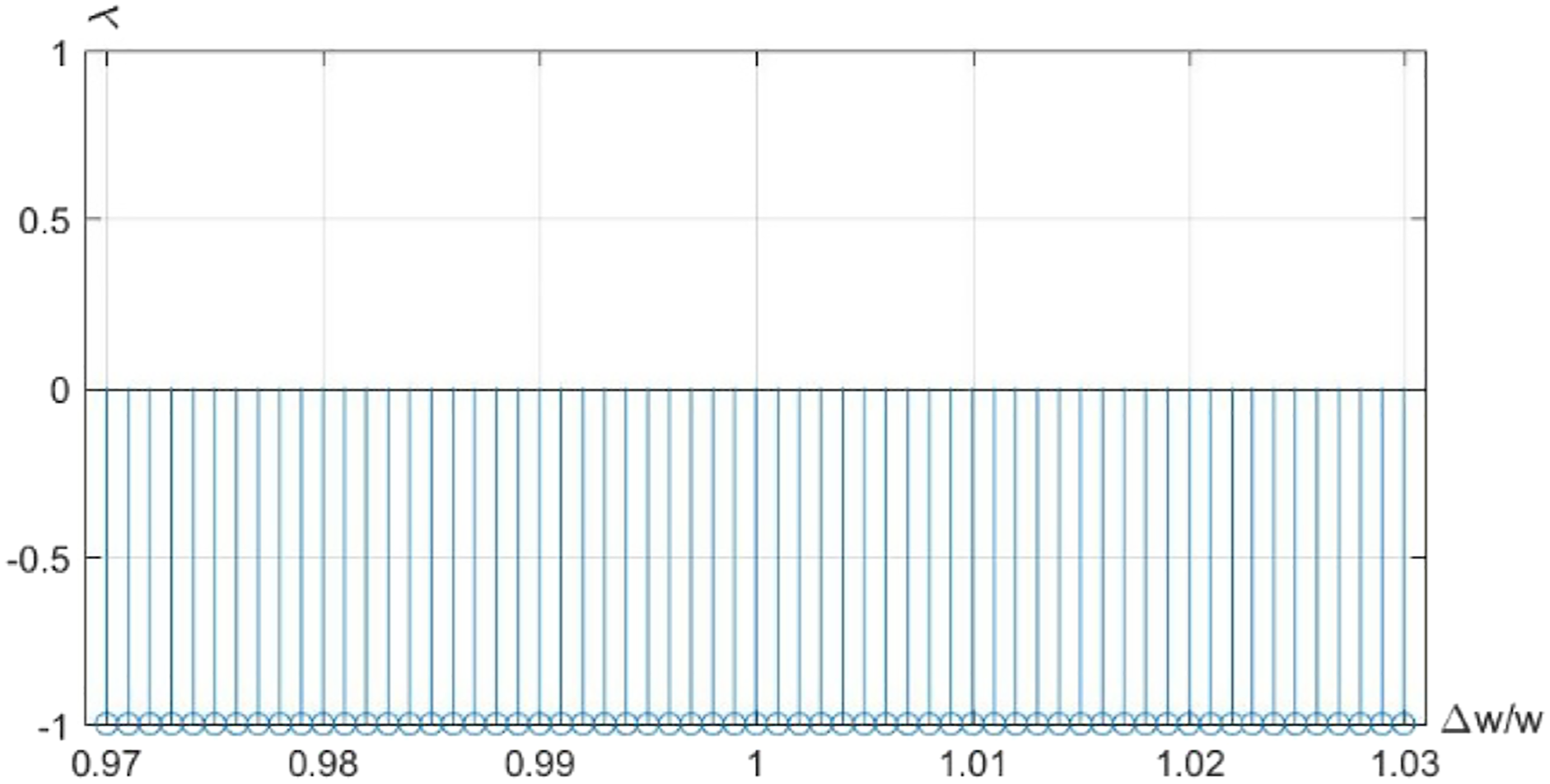
Figure 10 shows the frequency deviation between the weak signal and driving force in a certain range, that is,
According to the above experiments, the detector based on Duffing oscillator can effectively detect a wide range of weak signals. Compared with traditional methods, such as wavelet analysis, it is difficult to find the corresponding basis functions for different forms of signals, 31 or stochastic resonance that not suitable for long datasets. 32 Even the homotopy perturbation method is nonlinear, and it also has uncertain convergence. 33 The Duffing oscillator detector thus has high reliability and accuracy.
Conclusion
In view of the development of chaos theory, the classical Duffing oscillator in chaos is studied.
The basic principle of Holmes-Duffing oscillator is first studied. Based on the analysis of the original Holmes-Duffing oscillator model and in view of its shortcomings, the beam model is changed to a spring model, which makes the Holmes-Duffing equation more concise in calculation and analysis. The validity of the new model is proved by strict theoretical deductions.
Based on the modified model, the characteristics of Duffing oscillator are analyzed in detail. The effects of driving force amplitude and the initial value of frequency on the oscillator are studied, respectively, which reveals the change law of Duffing vibrator under different states.
In addition, through a new method and the Deviation Mean Square Judgment Method based on Poincare section, the quantitative judgment of the chaotic state is realized. This method has low computational complexity and high accuracy.
Finally, based on the above theory, an intelligent weak signal detector based on the Duffing oscillator is designed. The correctness and practicability of the above-mentioned theory are proved through a series of simulation experiments.
Through this work, people can comprehend the mechanisms and characteristics of the Duffing oscillator more intuitively and comprehensively. It provides a new idea for the study of Duffing oscillators and more.
Footnotes
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This work was supported by the Science Foundation in China (Grant No. 61701534).