
Abstract
An efficient method for solving vibration equations is the basis of the vibration analysis of a cracked multistage blade–disk–shaft system. However, dynamic equations are usually time varying and nonlinear, and the time required for solving is greatly increased accompanied by an increase in the model order caused by the multistage system and the nonlinearity caused by cracks. In this article, an efficient method for solving the time varying and nonlinear vibration equation is investigated. In the proposed method, the time varying terms are transformed into constant terms, while the local nonlinear matrix of the cracked blade is separated from the assembly stiffness matrix under the constraint of proper orthogonal decomposition (POD) transformation rules. Furthermore, the POD transformations of the constant terms and the linear assembled stiffness matrix can be implemented in the pretreatment steps to achieve a more efficient POD reduction operation. This research provides a method for efficiently performing the comprehensive and rapid analysis of nonlinear vibration characteristics of rotor systems.
Keywords
Introduction
Blades generally play a significant role in turbomachinery, and damage monitoring of rotating blades is becoming a popular research topic. Vibration modeling and characteristic analysis are the basis of damage monitoring. The model of a blade–disk–shaft system mainly includes the lumped-parameter model, the finite element model, and the continuous parameter model.1–5 Compared with the performance of the lumped-parameter model and the finite element model, the continuum model has higher precision, clearer analytical expression and higher computational efficiency, and has been widely used.
However, with the increase in the model order caused by a multistage system and the nonlinearity caused by cracks, the time required to solve the vibration equation is greatly increased, which affects the efficiency of vibration analysis. Therefore, the ability to rapidly solve nonlinear equations is particularly important. There are two approaches to quickly solve such equations, that is, constructing and optimizing the solution method and dimension reduction of the model.
In the research on solution methods for nonlinear equations, a large number of analytical, approximate analytical, and numerical methods have been proposed. Anjum and He 6 combined the variational iteration method with the techniques of the Laplace transform to find the approximate nonlinear frequency and approximate analytic solution of the model problem in microelectromechanical systems. Akuro and Chinwuba 7 used the continuous piecewise linearization method to solve the equations of coupled nonlinear models of a fixed-end two-mass system. Moreover, they investigated the effect of the mass ratio on the response. He et al. 8 proposed an approach to obtain the approximate periodic solutions of nonlinear oscillators. Then, they derived the frequency–amplitude relationship by adopting He’s frequency formulation. Noeiaghdam et al. 9 specifically designed the homotopy perturbation method to solve a second kind of linear Volterra integral equation and found the optimal approximation and optimal error. He and El‐Dib 10 discussed the solution and the stability conditions of the third-order Duffing equation by using the reducing rank method with the homotopy perturbation method. Biswal et al. 11 used the homotopy perturbation method to obtain the velocity profile of fluid flow for the Jeffery–Hamel problem. Lu and Zheng 12 explored the full power of the Adomian decomposition method (ADM), and they demonstrated the standard ADM and ADM with an integration factor to calculate explicit closed-form solutions of first-order scalar partial differential equations. Lichae et al. 13 adopted the asymptotic Adomian decomposition method (AADM) to solve the fractional order Riccati differential equations. Bavi et al. 14 solved the nonlinear vibrations of rotor–stator contact in a two-degree-of freedom model by employing Runge–Kutta numerical methods. They also analyzed the effect of gravity, damping, and asymmetry on the rotor response. Zhan 15 analyzed the order conditions of high-order explicit exponential Runge–Kutta methods for stiff semilinear delay differential equations. Vermeire and Hedayati Nasab 16 introduced a family of accelerated implicit explicit Runge–Kutta schemes for solving stiff system equations. Akbas 17 used the Newmark average acceleration method to solve the free vibration responses and the forced vibration responses of the axially functionally graded beam. Liu et al. 18 solved the free vibration and transient dynamic behaviors of functionally graded material on the basis of Newmark’s method.
The above methods provide efficient ways to solve nonlinear equations. Analytical and approximate analytical methods can be employed to analyze the influence of various parameters on the solution, which can provide intuitive graphical analysis of the solution. However, the solution and derivation of such methods are cumbersome; thus, this approach is difficult to apply to large-scale equations that lack simple analytical expressions. In the numerical method, the solutions are composed of numerical points. The disadvantage is that the development trend of the solution and the influence of related parameters cannot be directly analyzed, but a large number of complicated formula derivation steps can be reduced, which has advantages in solving large-scale and nonlinear vibration equations without simple analytical expressions.
With the intention of analyzing large-scale nonlinear vibration equations of a cracked bladed disk rotor system, scholars have also performed extensive research on the dimension reduction of the vibration model to quickly solve transient and steady-state vibration responses. Wang et al. 19 employed the complex free interface component mode synthesis method to reduce the order of a model. Pourkiaee and Zucca 20 employed the Craig–Bampton method and modal synthesis based on loaded interface modeshapes to present a new reduced-order model for the nonlinear vibration analysis of mistuned bladed disks with shrouds. Joannin et al. 21 introduced a novel reduced-order modeling technique combining the concepts of nonlinear complex modes with characteristic constraint modes. Sun et al. 22 proposed a novel framework in which the sophisticated geometrical structure was considered by the finite solid element method, and efficient model order reduction was applied to the model. Alsaleh et al. 23 demonstrated that a two-degree-of-freedom (DOF) model could predict flexural vibrations under rigid conditions with an error of less than 5%. They also illustrated the applicability of employing simple models to predict the dynamic response of a real rotor system. The above studies provide important methods and strategies for dimension reduction of vibration equations, and each method has its own advantages and application scope.
Another kind of dimension reduction method is proper orthogonal decomposition (POD), and its advantage is that it can reduce a system with moderate order to that of a very small order. Therefore, POD has been widely applied in the field of nonlinear research. Vergari et al. 24 developed a reduced-order model for heat transfer problems in computational fluid dynamics that relied on the POD. Yu et al. 25 reduced a 22-DOF nonlinear system of a high-pressure rotor to a 2-DOF system, preserving the oil film oscillation property by employing a modified POD method. Im et al. 26 proposed a new reduction process in which the dynamic substructures were reduced via POD. Lu et al. 27 proposed a modified nonlinear POD method to reduce the order of the multiple DOFs of a rotor system. Sidhu et al. 28 introduced a sparse proper orthogonal decomposition–Galerkin methodology for the model dimension reduction of nonlinear parabolic partial differential equation systems. Nguyen et al. 29 employed the POD technique to project the original large-scale full chemical process model onto a small system with a reduced model space. Jin et al. 30 proposed a new adaptive POD method to address the weakness of the local property of the interpolation tangent-space of the Grassmann manifold method. Eftekhar Azam et al. 31 provided effective online estimations of the possible structural damage by tracking the time evolution of stiffness parameters in the model order reduction procedure. Luo 32 presented a hybrid model method based on POD for the aerodynamic design optimization of a low-speed 4.5-stage compressor.
Compared with the order of the finite element model, the order of the continuum model of the blade–disk–shaft system discretized by the assumed modal method is very low; thus, it is more suitable to adopt the POD reduction method. However, if the POD method is directly applied to time varying and nonlinear equations, the POD transformation must be performed in each iteration process but not in the pretreatment step. Therefore, although the POD reduces the order of the equation, the POD transformation in the iterative process increases the calculation time, which results in the failure to reduce the time consumption.
Based on the analysis of the literature and the summary of the problems described above, a continuum dynamic model of a cracked multistage blade–disk–shaft system is established in Dynamic model of a multistage blade–disk–shaft system to illustrate the inevitability of introducing nonlinearities and time varying coefficients into the model. Furthermore, based on the POD method, an efficient method referred to as constant coefficients local nonlinearity POD (CC_LNLPOD) is proposed in Proposed CC_LNLPOD method to solve time varying and nonlinear equations. Then, in Comparison of the results of different solving methods, the accuracy and time consumption of the proposed method are compared with those of other methods. Finally, the conclusions are drawn in Conclusions.
Dynamic model of a multistage blade–disk–shaft system
In this section, a continuum dynamic model of a cracked multistage blade–disk–shaft system is established to illustrate the inevitability of introducing nonlinearity and time varying coefficients into vibration equations. After that, the shortcomings of conventional numerical methods in solving time varying and nonlinear equations of multistage bladed disk rotor systems are further discussed.
Modeling of a normal system
First, the absolute coordinates of the microunit of continuum components (shafts, disks, and blades) are established in a fixed coordinate system. The velocity expression is then obtained by derivation of the time variant coordinates (displacements). On this basis, the kinetic and potential energy equations of the components are obtained by integration. Then, the energy equations are discretized by the assumed modal method, while the vibration equations about generalized coordinates are established based on the Lagrange equation.
The schematic diagram of the multistage blade–disk–shaft system is shown in Figure 1, and it contains a bending and torsional shaft, three disks, and flexible blades fixed onto the outer edge of the disk with a setting angle β. oxyz denotes the global coordinate, Px
i
y
i
z
i
is the rotating coordinate attached to the ith disk with a rotational speed Ω, and z
di
is the coordinate of the ith disk in the z-axis. hd and hb represent the thicknesses of the disk and blade, respectively. Schematic diagram of the multistage bladed disk rotor system.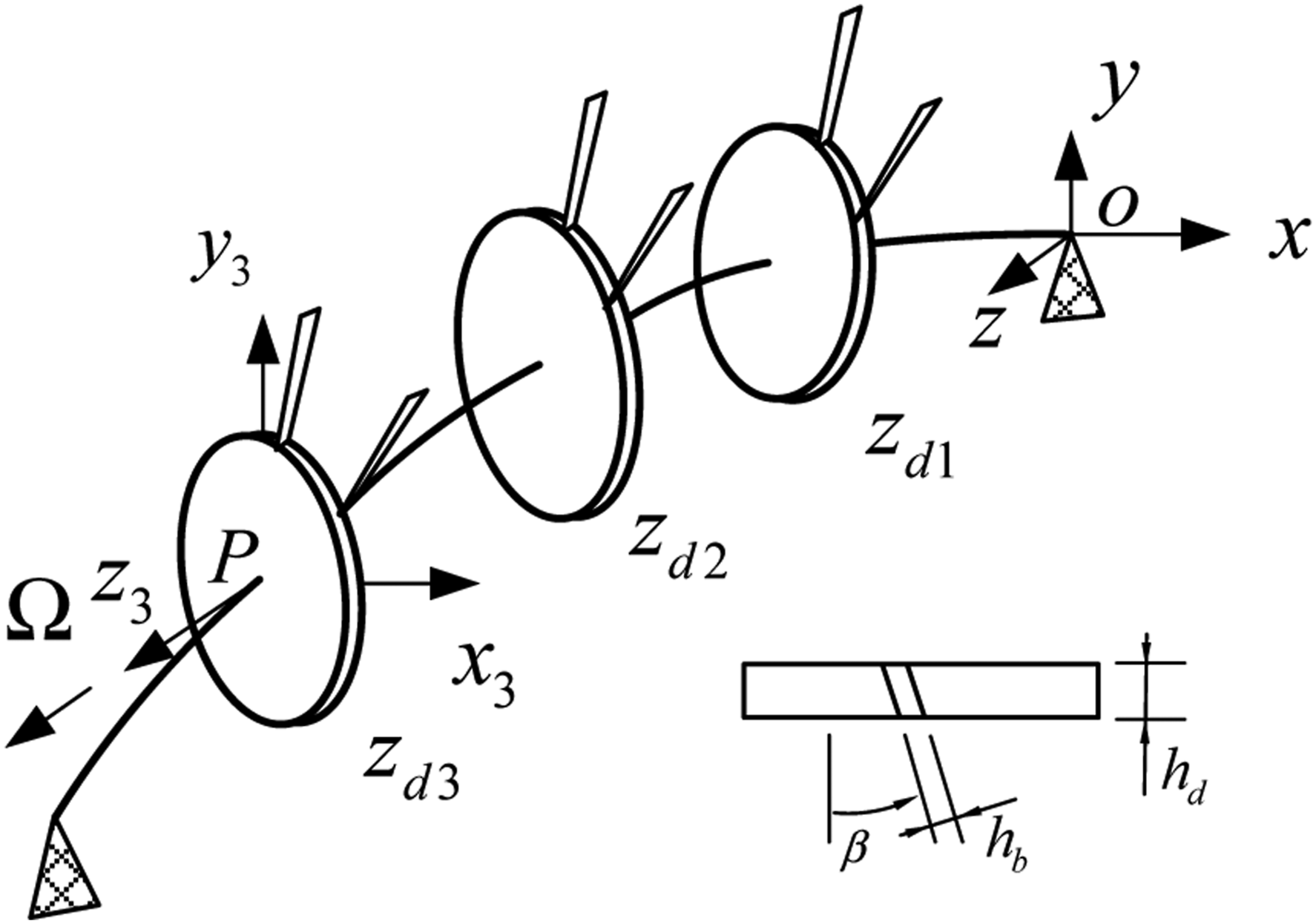
Based on the hypothesis of small deformation, the motion of the blade–disk–shaft system can be projected in three planes (oxy, ozx, and ozy) along three coordinate axes. One of the disks is taken as an example, and the motion decomposition is shown in Figures 2 and 3. The omitted view in the ozy plane is similar to that of Figure 2. The bold line represents the rigid body displacement of the component, while the dashed line represents the elastic deformation of the component. Decomposition of motion in the ozx plane. Decomposition of motion in the oxy plane.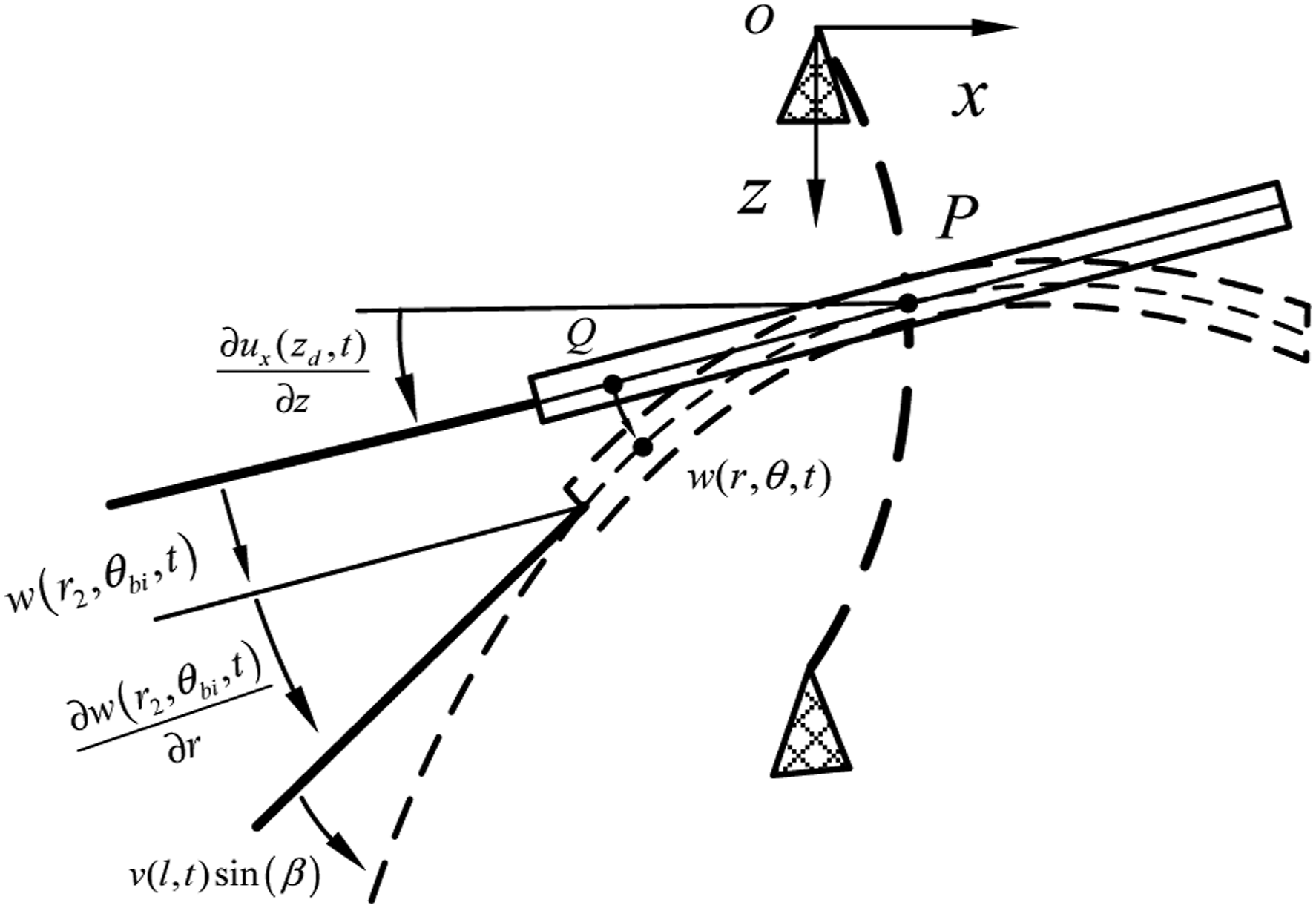
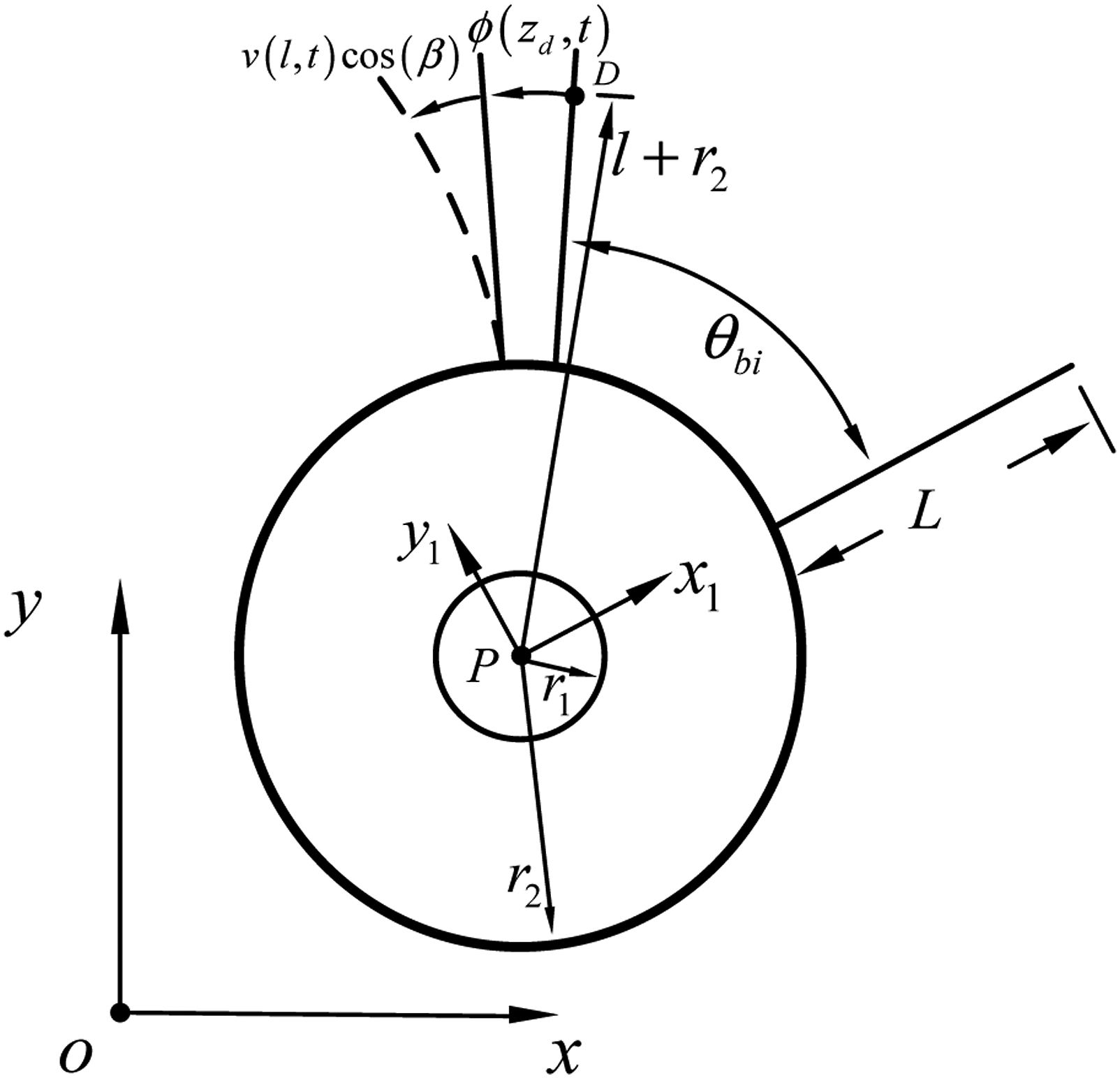
Figure 2 shows a schematic diagram of the decomposition of motion in the ozx plane. In this figure, Q is an arbitrary microunit in the disk,
Figure 3 shows a schematic diagram of the decomposition of motion in the oxy plane. In this figure, D is an arbitrary microunit in the blade, its distance from the root of the blade is l, and L is the length of the blade. The direction of the x
i
-axis is coincident with the spanwise direction of the reference blade (the first blade). r1 and r2 are the inner diameter and outer diameter of the disk, respectively.
According to the decomposition of motion and coordinate system settings described above, the coordinates of arbitrary microunits in the shaft during the rotation of the rotor and the structural elastic vibration with respect to the fixed coordinate system can be expressed as follows

The velocity expression can be obtained through the derivation operation of the time variant coordinates (displacements). Based on the consideration of the translational motion and the rotation around the z-axis, the total kinetic energy of the shaft can be acquired by integrating the kinetic energy of the microunit along the shaft

According to elasticity theory, the torsion and bending of the shaft are considered, and the total potential energy of the shaft can be given as follows
33

In this study, the disk is assumed to be a rigid body without considering its elastic deformation. Moreover, the inertia product and moment of inertia of the disks are relatively large, so the disk cannot be treated as particles. Therefore, the translational and rotational kinetic energy of the jth disk is as follows



The bending potential energy and centrifugal potential energy of the ith blade can be given as follows
34



Then, the total potential energy of the blades in the jth disk can be given as follows




In a similar way, the displacements of the blade can be expressed as follows
34

The equations above are substituted into the energy expressions, and the Lagrange equations are employed to yield the following discretized equations of motion in matrix notation



Multistage blade–disk–shaft system with a cracked blade
In the modeling of a cracked blade, the released energy associated with the crack is considered as follows33,35


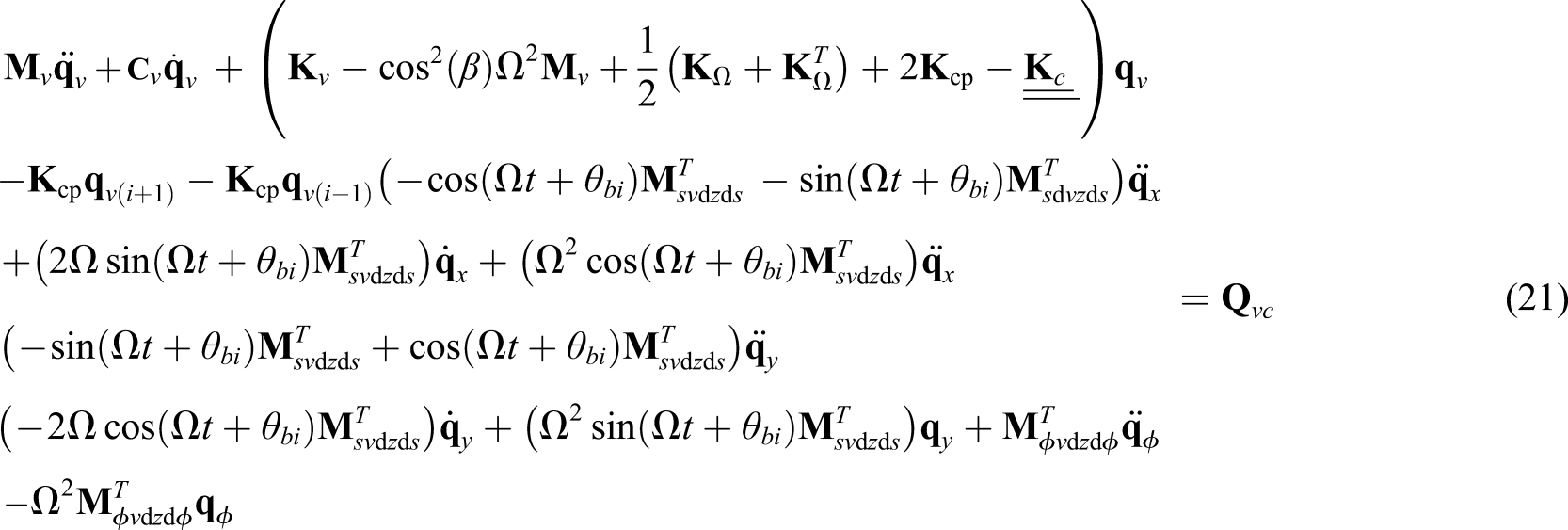


As seen in equations (21) and (37)–(40), the assembled vibration equation (equation (23)) is time varying and nonlinear.
Conventional solution for time varying and nonlinear equations
The Newmark-β direct integration method
37
is commonly used to solve the assembled vibration equation of the cracked blade–disk–shaft system with time varying coefficients and nonlinearities. The solving methodology is shown in Figure 4. Flowchart of the conventional solving method.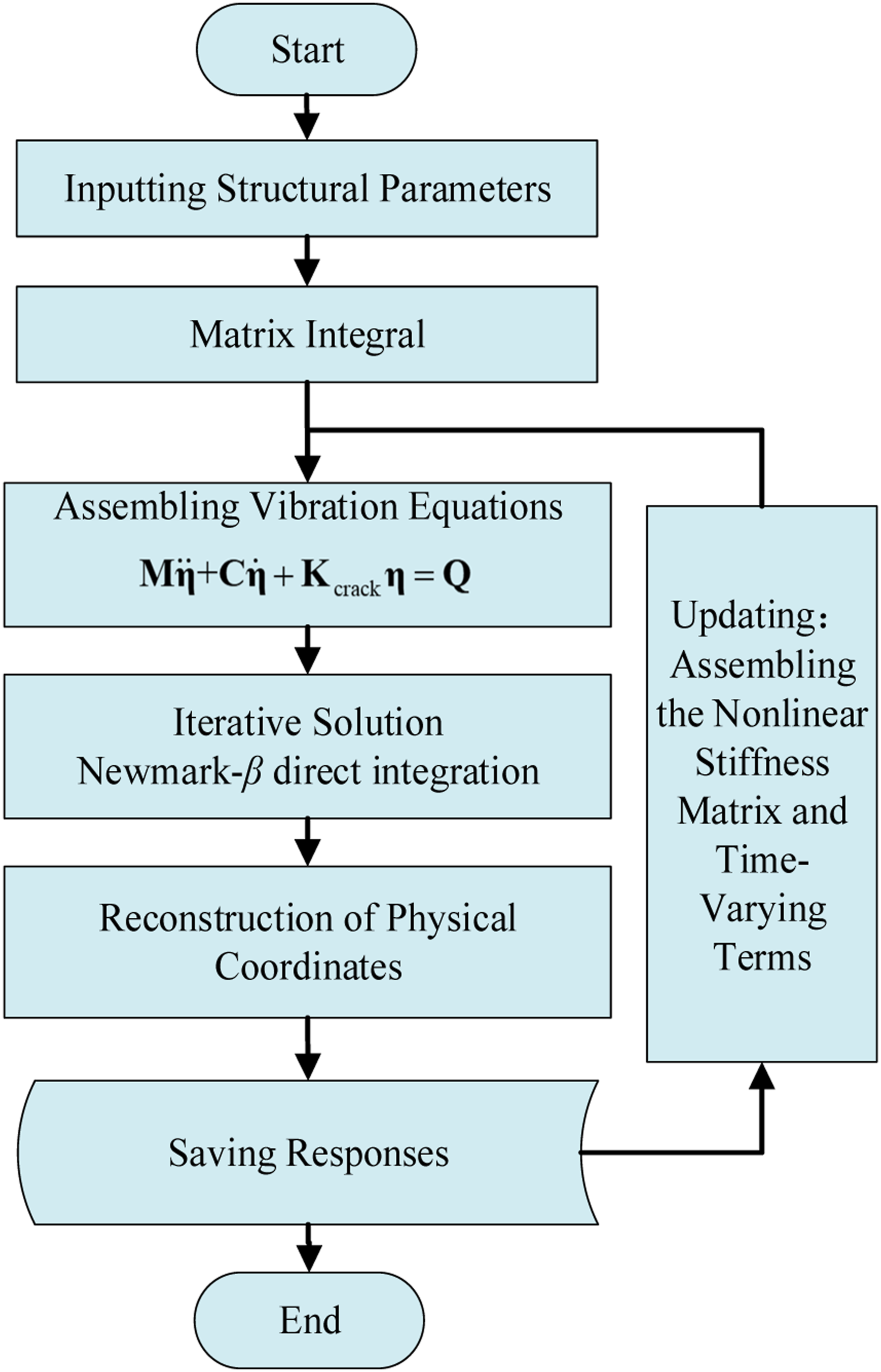
As seen in equations (37)–(40), there are many constant matrices with time varying coefficients in the assembled vibration equation, equation (23), and these constant matrices are obtained by the matrix integral of the assumed modal matrices, as shown in the “matrix integral” step.
Then, according to equations (21) and (37)–(40), the standard form of equation (23) can be assembled in the “assembling vibration equation” step.
After that, the Newmark-β direct integration method is adopted to solve the responses of the generalized coordinates at each iterative step in the “iterative solution” step.
Afterward, the responses of the physical coordinates are obtained by combining the responses of the generalized coordinates with the associated assumed modalities in the “reconstruction of physical coordinates” step.
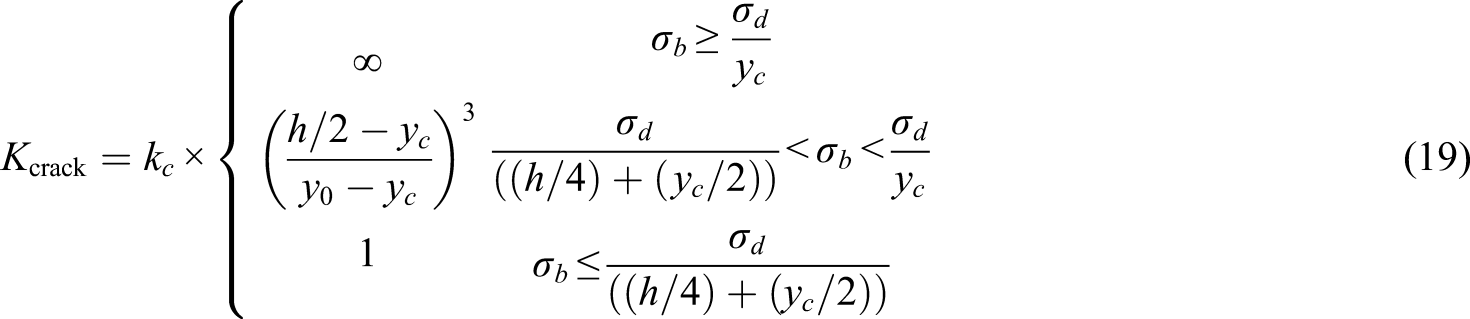
At this time, the breathing state and instantaneous stiffness of the crack can be determined and calculated according to equation (19).
Finally, the assembled stiffness matrix and time varying terms are updated in the next time step.
With the increase in the model order caused by the multistage system and the nonlinearity caused by cracks, the time required to solve the vibration equation is greatly increased. Therefore, the above solving methodology needs to be optimized.
Proposed CC_LNLPOD method
Due to the influence of time varying coefficients and nonlinearity, POD dimension reduction needs to be carried out in the iterative process. Although the dimension can ultimately be reduced, the calculation time cannot be reduced. Therefore, on the basis of the POD method, an efficient solution method is proposed to optimize the solving methodology for time varying and nonlinear equations.
In the proposed method, two key transformations are adopted for the time varying and nonlinear equations so that the POD dimension reduction transformation of the large matrix can be carried out in the pretreatment step, which greatly reduces the calculation amount of the POD dimension reduction transformation in the iterative process and achieves a more efficient POD reduction operation.
First, the time varying coefficients of matrices are transformed into constant coefficients (CC) by introducing coordinate transformation and constructing equation transformation approaches. Then, matrix segmentation and separation strategies are proposed to separate the local nonlinear stiffness matrix of the cracked blade from the assembly stiffness matrix under the constraint of POD transformation rules. Only the POD transformation of the small-sized local nonlinear stiffness matrix (LNLPOD) needs to be performed in the iteration process. Thus, the proposed method is abbreviated as CC_LNLPOD.
Nonlinear transient POD
General nonlinear systems with multiple degrees of freedom can be rewritten in the following matrix form
25

The nonlinear transient POD is described as follows.
25
Under the given initial conditions and the rotational speed, all information of the displacements in the transient process is collected into a matrix Put



Time varying terms to constant terms
In the fixed coordinate system, the coefficients of the vibration equations are periodically time varying, as shown in equations (21) and (37)–(40). Time varying coefficients introduce difficulties in performing the POD transformation in equation (27) in pretreatment steps, resulting in the failure to achieve an efficient solution. Therefore, it is necessary to transform time varying periodic coefficients (PC) into constant coefficients.
Coordinate transformation is used to realize the transformation from a time varying coefficient to a constant coefficient, and the transformation equation is constructed as follows.



Then, equations (28)–(30) are substituted into equations (37) and (38). Equation (41) can be acquired by constructing the transformation
The coordinate transformation and constructing equation transformation are introduced, and the time varying terms are transformed into constant terms, as shown in Appendix 2.
Separation of local nonlinearity
With the new generalized coordinates
However, considering the influence of the centrifugal effect and bending vibration on the crack, nonlinearity is inevitably introduced into the stiffness matrix of crack blades. In contrast, the stiffness matrix of normal blades is constant. If the POD transformation is adopted for the assembled stiffness matrix in the iterative process, it will result in unnecessary updates and increase the calculation time.
In the following strategy, the local nonlinear stiffness matrix of the cracked blade is separated from the assembly stiffness matrix under the constraint of POD transformation rules. Then, the POD transformation of the assembled stiffness matrix after separating the local nonlinear matrix can be implemented in the pretreatment step to achieve a more efficient POD reduction operation.
Segmentation of the assembled stiffness matrix
This section aims to explain the basic principles of the strategy. The number of mode truncation orders of assumed modal matrices Segmentation of the assembled stiffness matrix.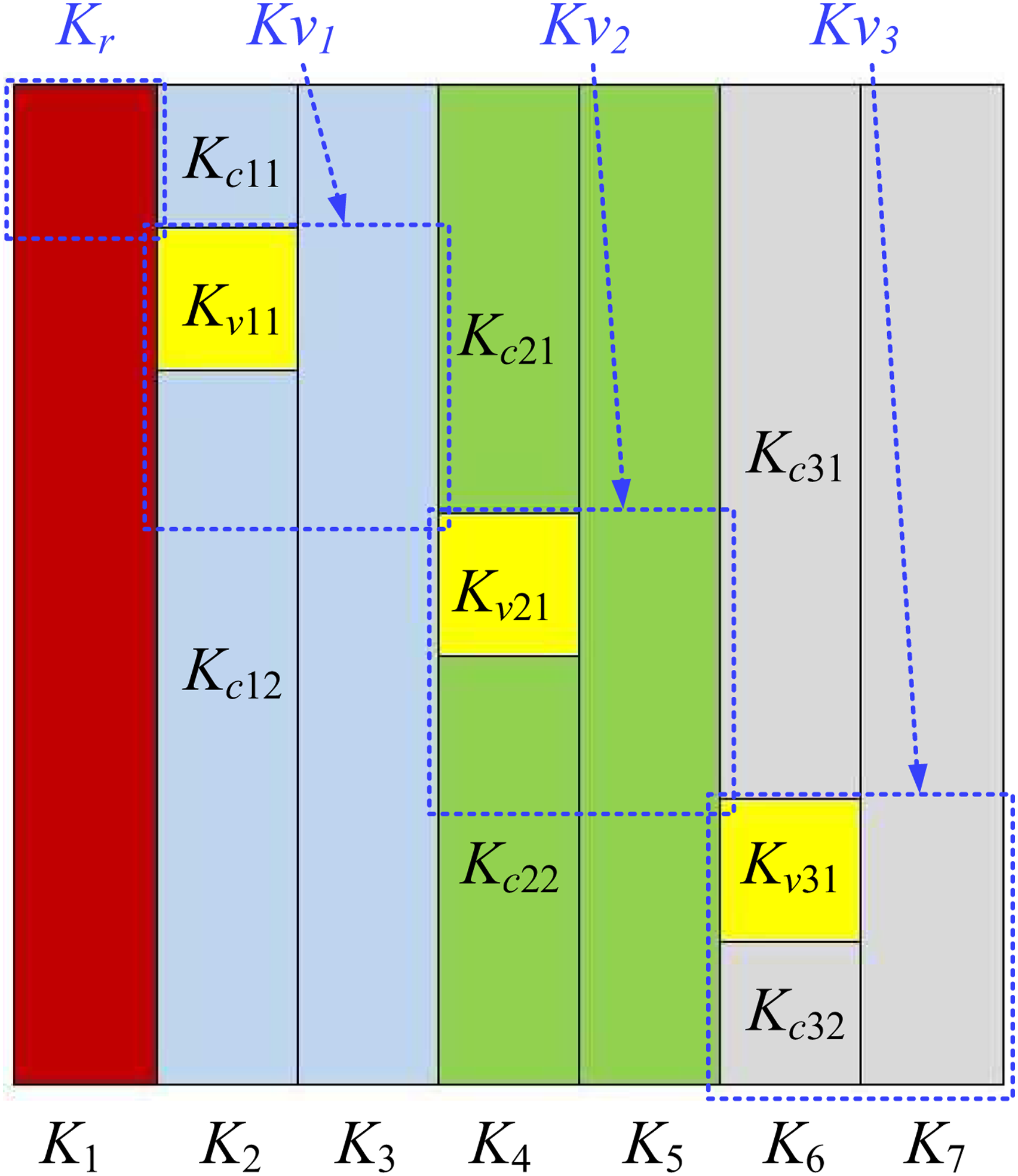
K r is associated with the shaft, corresponding to the lateral generalized coordinates in two directions and the torsional generalized coordinates, and it is a 14×14 matrix. Kv1, Kv2, and Kv3 are local assembled matrices corresponding to the blades attached to these three disks. Their orders are 15×15, 18×18, and 21×21, respectively.
To facilitate the computation, the assembled stiffness matrix is segmented into seven column matrix blocks K1–K7, as shown in Figure 5, and their column numbers are 14, 3, 12, 3, 15, 3, and 18. K1, K3, K5, and K7 are constant matrices. K2, K4, and K6 contain the nonlinear matrices Kv11, Kv21, and Kv31 of the cracked blade, respectively. Furthermore, K2 is segmented into Kc11, Kv11, and Kc12, K4 is segmented into Kc21, Kv21, and Kc22, and K6 is segmented into Kc31, Kv31, and Kc32.
Finally, the assembled stiffness matrix is segmented into 13 matrix blocks, as shown in equation (31). There are only three 3×3 nonlinear matrices, Kv11, Kv21, and Kv31, and the other matrix blocks are constant

Separation of local nonlinearity
First, the POD transform matrix

Letting

Denoting

In a similar way,

In a similar way,

Consequently, these three 3×3 nonlinear matrices, Kv11, Kv21, and Kv31, are separated from the assembled stiffness matrix under the constraint of POD transformation rules.
Flowcharts of the proposed method
The main innovation of this method is that two key operations, the coordinate transformation and nonlinearity separation, are constructed, such that the POD dimension reduction transformation of the large matrix can be carried out in the pretreatment step. This greatly reduces the calculation amount of POD dimension reduction transformation in the iterative process to realize the efficient solution of time varying and nonlinear equations.
The flowcharts of the proposed method are shown in Figure 6. Compared with Figure 4, the main differences in steps are as follows: Flowcharts of the proposed constant coefficients local nonlinearity proper orthogonal decomposition method.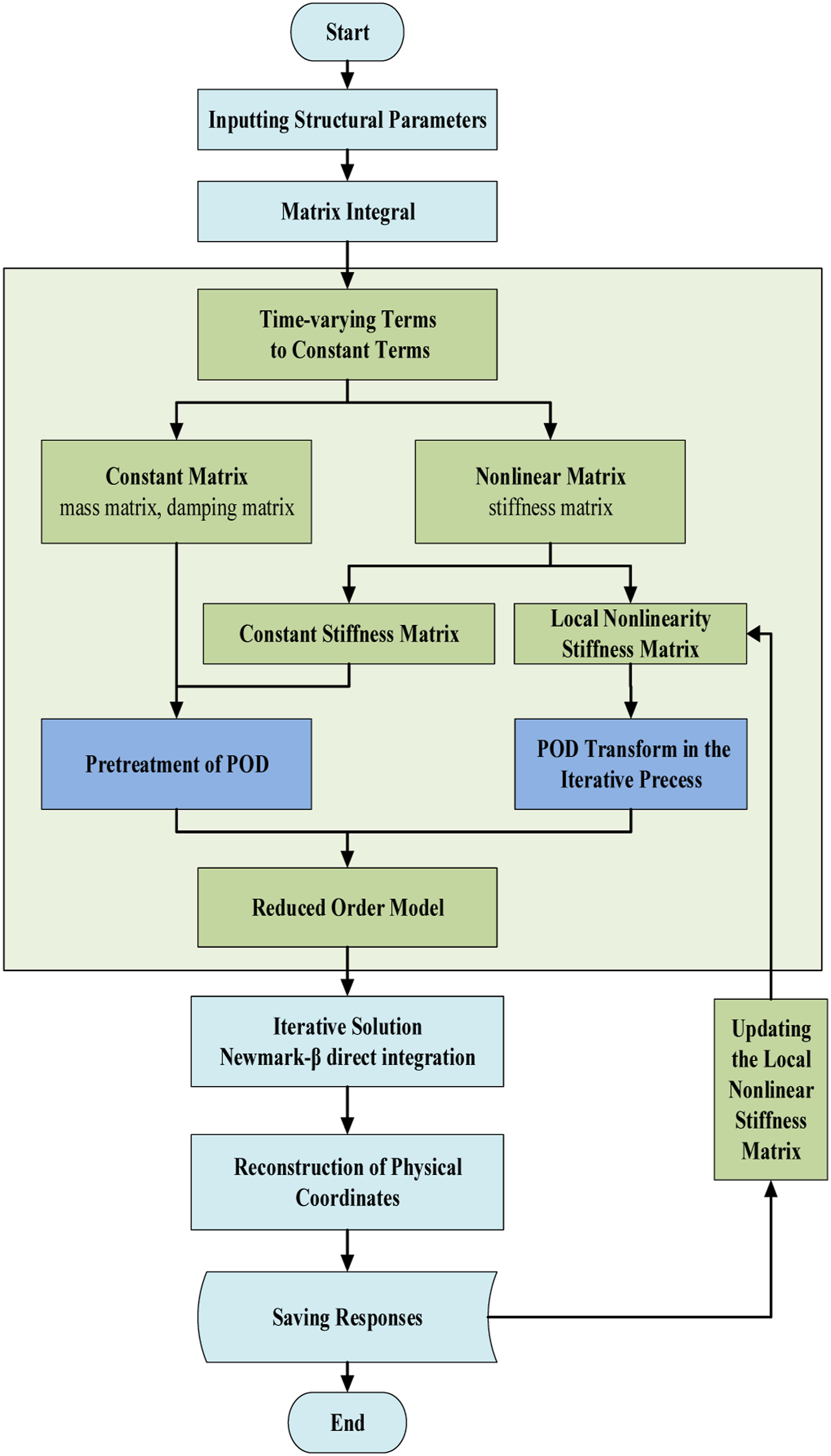
First, the time varying terms are transformed into constant terms by introducing the coordinate transformation and the constructing equation transformation. At this point, the assembled vibration equations only contain a constant mass and damping matrix and a nonlinear stiffness matrix.
Then, matrix segmentation and separation strategies are proposed to separate the local nonlinear stiffness matrix of the cracked blade from the assembly stiffness matrix under the constraint of POD transformation rules. At this point, the assembly nonlinear stiffness matrix is divided into a constant matrix and a local nonlinear matrix.
After that, the POD dimension reduction transformation of the constant mass matrix, damping matrix, and constant stiffness matrix can be implemented in the pretreatment step, which achieves a more efficient POD reduction operation. Only the small-sized local nonlinear stiffness matrix needs to be transformed in the iteration process at each time step.
Finally, the pretreatment and dynamic updated POD transformations are fused to construct the reduced-order model, which can be solved numerically by the Newmark-β method.
Comparison of the results of different solving methods
This section compares the response errors and efficiencies of five models. The original time varying and nonlinear vibration model (equations (37)–(40)) is abbreviated as PC. The POD transformed model of the PC is abbreviated as PC_POD. The constant coefficient model (equations (41)–(44)) is abbreviated as CC. The POD transformed model of the CC is abbreviated as CC_POD. The POD transformed model of the CC adopts the local nonlinear separation strategy, which is the proposed method and is abbreviated as CC_LNLPOD.
The rotation speed of the rotor system is Ω = 2900 r/min and the rotating frequency is 1× = 48.3 Hz. Aerodynamic loads are applied to blades by traveling wave excitation, and the fundamental frequencies are set to 6×, 7×, and 8× at these three stages. An eccentric load is applied to the rotating shaft.
Comparison of the PC and PC_POD
The response error comparisons of the PC_POD models (with different reduction orders) and the original model PC are shown in Figure 7. In this case, the generalized degrees of freedom of the PC is fd = 68 (the parameter M in equation (25)), and the generalized degrees of freedom of the three PC_POD models are frd = 5, frd = 15, and frd = 25, (the parameter k in equation (25)), respectively. Vibration responses of a shaft solved by PC and PC_POD models. (a) Time domain waveforms and (b) frequency spectra. PC_POD: proper orthogonal decomposition transformed model of the PC; PC: periodic coefficients.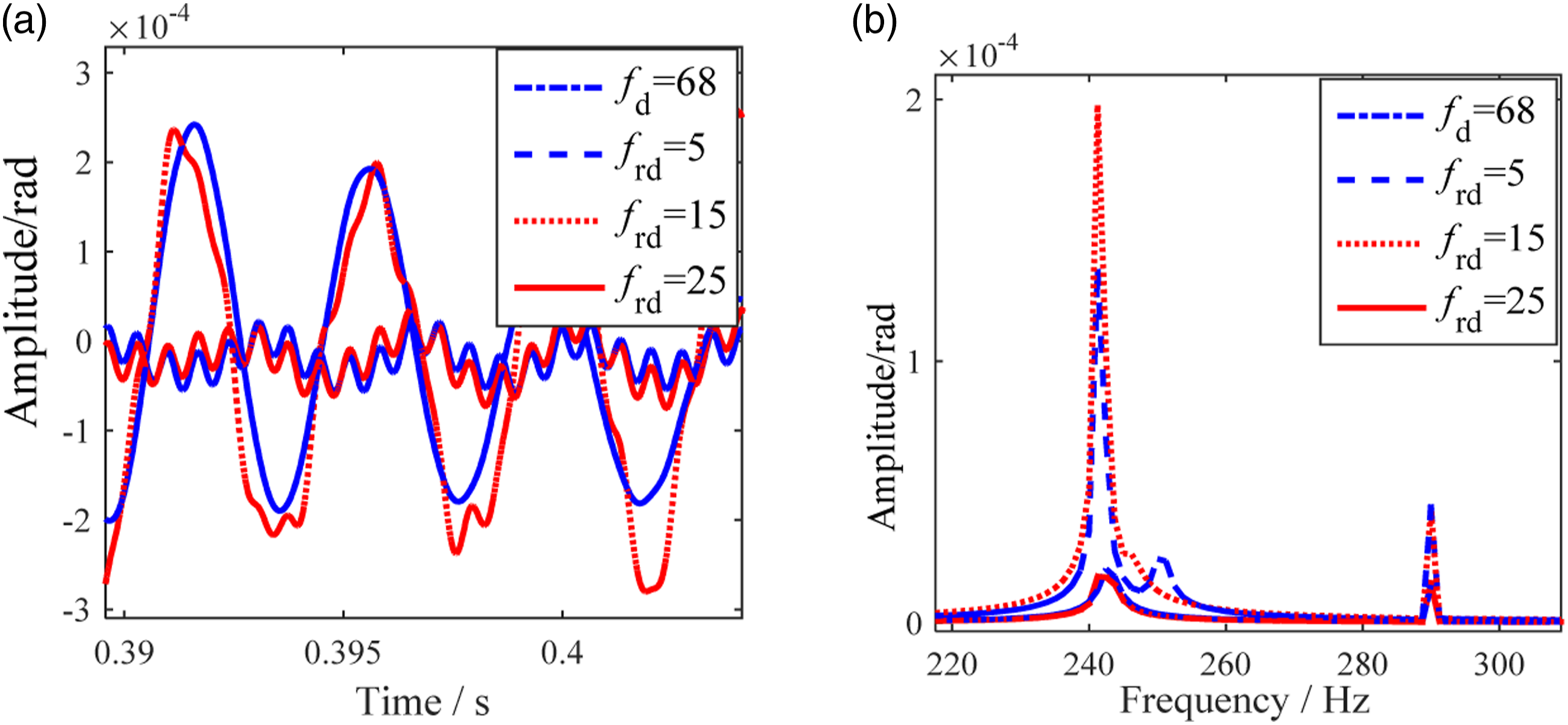
Figure 7 shows that when the generalized degree of freedom is reduced to frd = 5 and frd = 15, the response amplitudes of the reduced-order models differ greatly from that of the original model fd = 68. The frequency components and amplitudes of the spectra are also significantly different, which indicates that these two reduced-order models cannot obtain the same precision as the original model.
The time-domain waveform of the model whose order is reduced to frd = 25 is almost the same as that of the PC model fd = 68. In addition, the frequency components and amplitudes of these two models coincide well. This shows that the accuracy of the PC_POD model with DOFs reduced to frd = 25 satisfies the requirements of the quantitative and qualitative analysis of vibration responses.
Figure 8 shows the computation time of the four models mentioned above. The solved time history, that is, the duration of the vibration response, is one second. After reducing the order, the solution time of the model can be reduced. The time reductions of low-order models are significant, but the precision of the models when f
rd
= 5 and frd = 15 cannot meet the accuracy requirements. However, the accuracy of the reduced model when frd = 25 satisfies the requirements, but its time reduction is not sufficient. Time-consuming comparisons of the PC and PC_PODs. PC_POD: proper orthogonal decomposition transformed model of the PC; PC: periodic coefficients.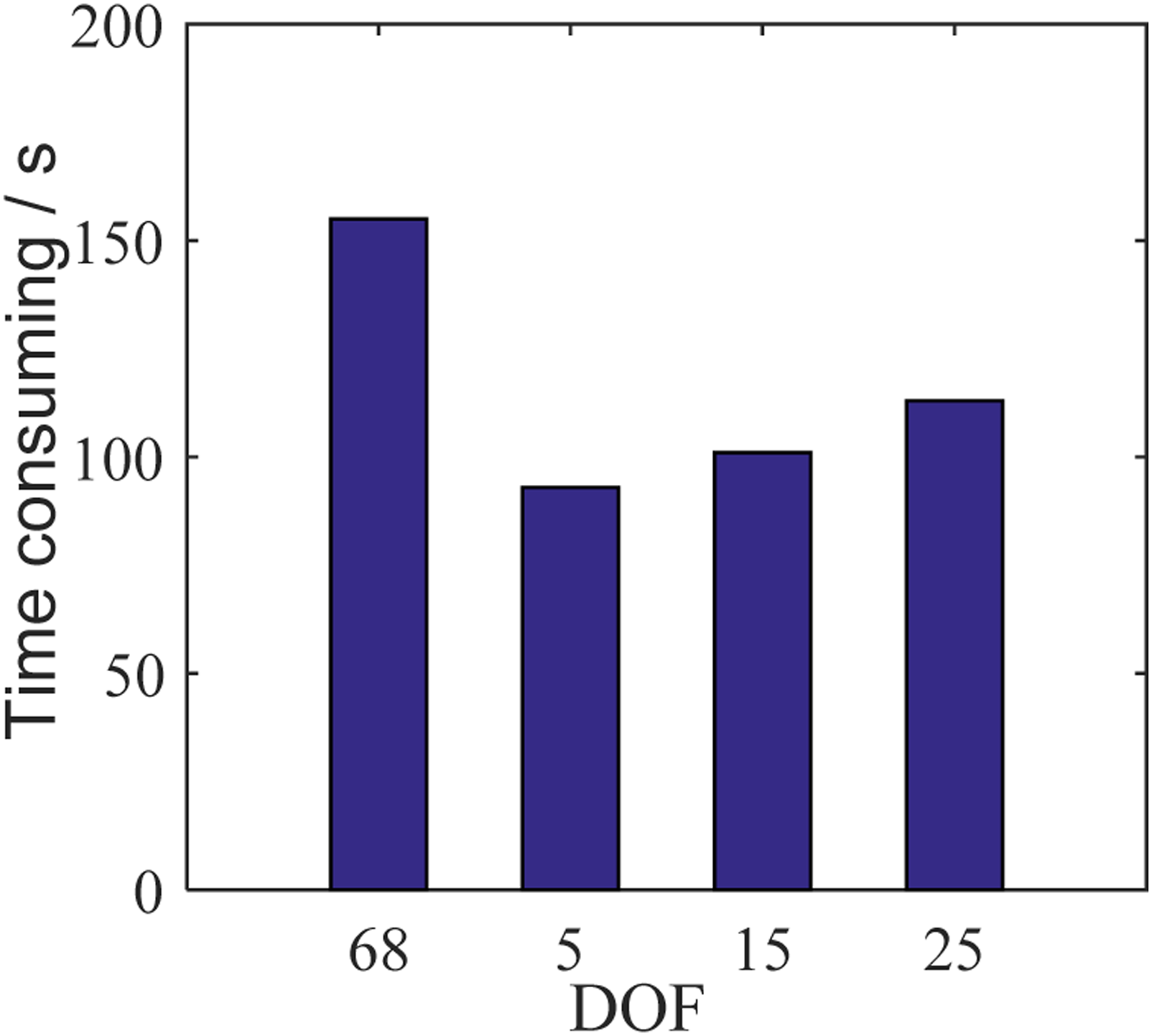
The accuracy and time-consuming comparisons show that it is not a reasonable strategy to directly apply the POD for the periodic coefficient model.
Comparison of the CC versus CC_LNLPOD
The transformation from the time varying equation (periodic coefficient) PC into the CC equation is realized by the variable substitution of the generalized coordinates, which do not involve model reduction. Therefore, the accuracies of the PC and CC are equivalent.
In the CC model, the time varying mass matrix and damping matrix are transformed into a constant matrix so that their POD transformations can be carried out in the pretreatment step, which can significantly reduce the calculation time. However, the assembly stiffness matrix is nonlinear, and its POD transformation needs to be carried out in iterations. The proposed local nonlinearity separation strategy does not change the model orders but optimizes its solution strategy. Therefore, the accuracy of CC_LNLPOD is the same as that of CC_POD.
Therefore, we only compare the accuracies of the CC_LNLPOD and CC models. The orders of the CC_LNLPOD models are reduced to frd = 15 and frd = 25, and the order of the CC model is fd = 68. The comparison results of the vibration responses are shown in Figure 9. The solution results of the reduced model CC_LNLPOD when frd = 15 are significantly different from those of the original model CC ( fd = 68), which indicates that the reduced model when frd = 15 cannot retain the response characteristics of the original model. Comparison of the vibration response of the CC and CC_LNLPODs: (a) torsional responses and (b) lateral responses. CC: constant coefficients; CC_LNLPODs: constant coefficients local nonlinearity proper orthogonal decomposition.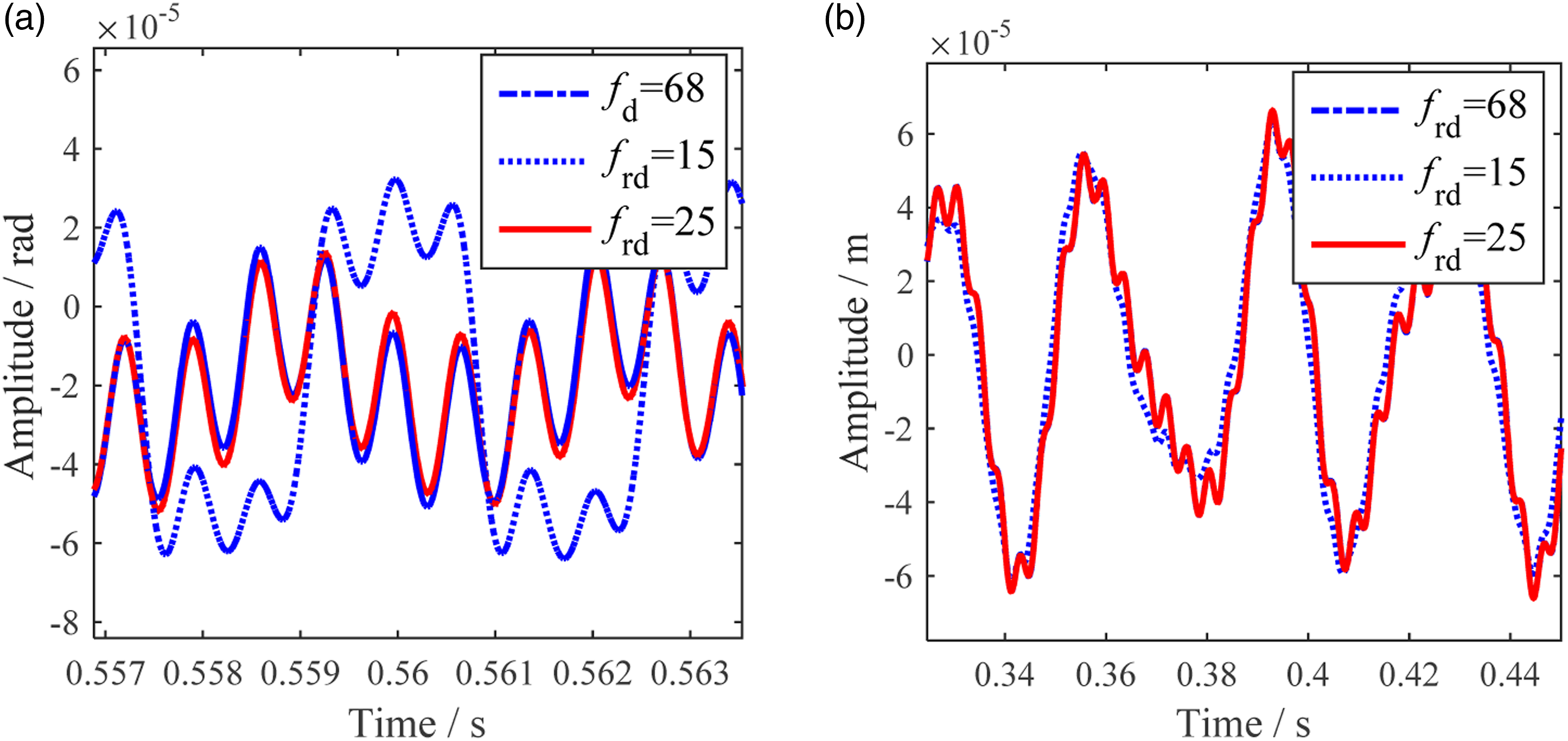
In the reduced-order model CC_LNLPOD when frd = 25, the time-domain waveform coincides well with that of the original model CC with fd = 68. This shows that the accuracy of the CC_LNLPOD model with DOFs reduced to frd = 25 satisfies the needs of quantitative and qualitative analysis of vibration responses.
Time consumption comparison
This section compares the time consumption of each model when frd = 25. Figure 10 shows the comparisons of the time consumption of the PC, CC, CC_POD, and CC_LNLPOD models when the solved time histories, that is, the durations of the vibration response are 0.5 s, 1 s, and 2 s. Figure 10 shows that constant coefficient transformation, POD transformation, and local nonlinearity separation all have significant effects on reducing the computational time. Compared with the original periodic coefficient model, the computation time of the CC, CC_POD, and CC_NLPOD models decreases significantly with time. Time consumption comparisons of the four models.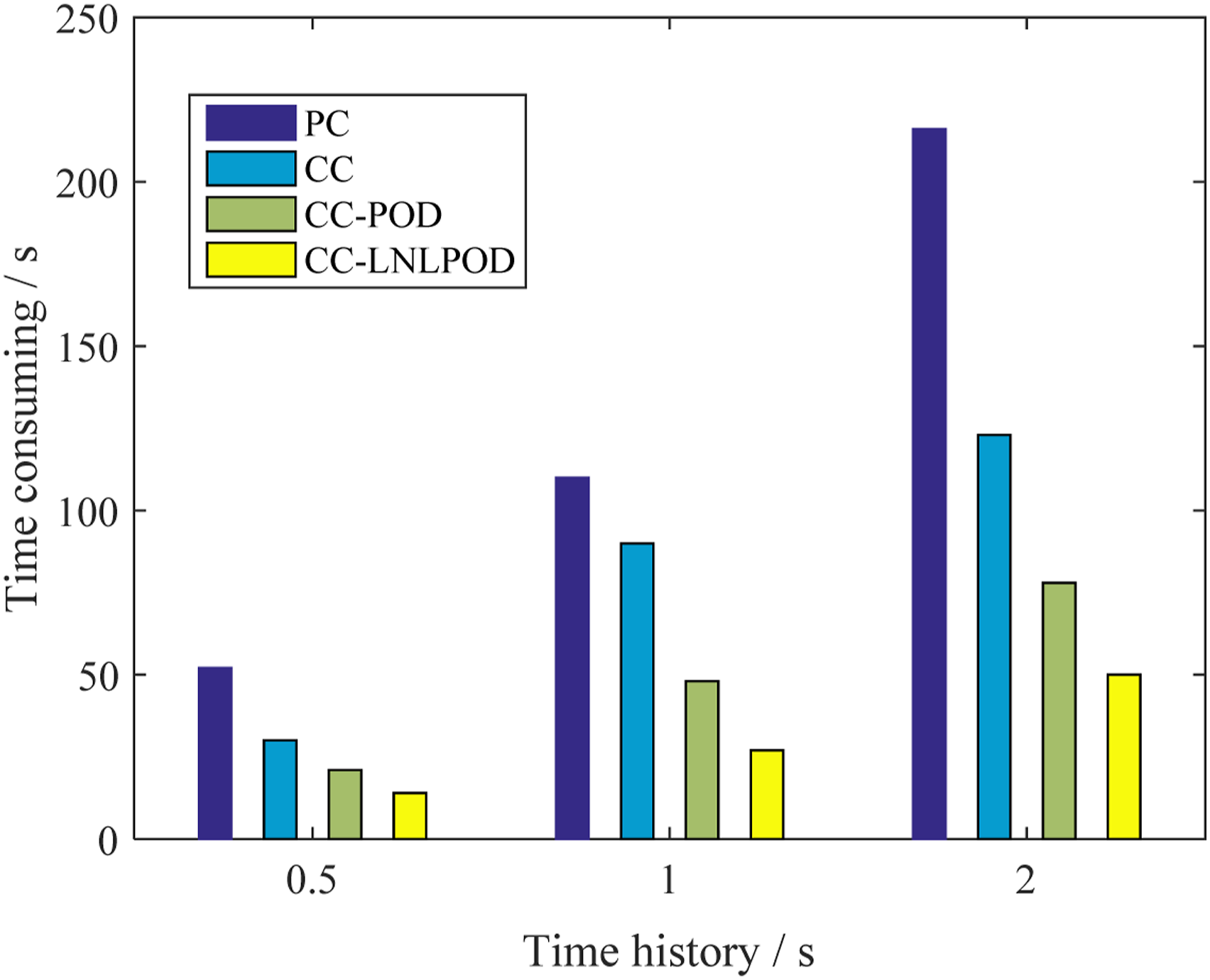
Comparison of the time consumption of the four models.
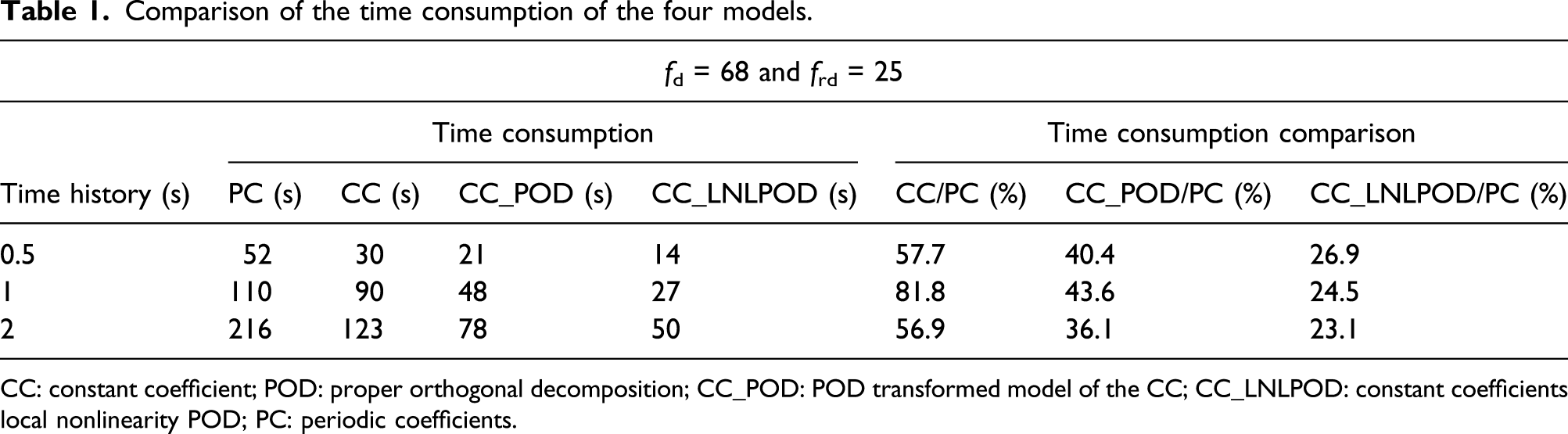
CC: constant coefficient; POD: proper orthogonal decomposition; CC_POD: POD transformed model of the CC; CC_LNLPOD: constant coefficients local nonlinearity POD; PC: periodic coefficients.
The comparison results show that the proposed CC_LNLPOD solution method significantly reduces the computational time, and its accuracy is consistent with that of the original PC model, thereby achieving an efficient solution for the equation with time varying coefficients and nonlinearities.
Conclusions
In this study, an efficient solving method is proposed for the time varying and nonlinear vibration equation of a multistage blade–disk–shaft system. The main contributions of this study are summarized as follows. Vibration equations are established to illustrate the inevitability of time varying coefficients and nonlinearities in the dynamic models that consider the influence of the centrifugal effect and bending vibration on blade cracks. By introducing the coordinate transformation and constructing equation transformation, the time varying terms are transformed into constant terms, and the assembled vibration equations only contain a constant mass matrix, constant damping matrix, and nonlinear stiffness matrix. Matrix segmentation and separation strategies are proposed to separate the local nonlinear stiffness matrix of the cracked blade under the constraint of POD transformation rules. In addition, the assembly of the nonlinear stiffness matrix is divided into a constant matrix and a local nonlinear matrix. After the transformation of the time varying terms and the separation of the local nonlinear terms, the POD dimension reduction transformation of the assembled matrix can be carried out in the pretreatment step, which greatly reduces the calculation time. The comparison results show that, on the premise of ensuring the solution accuracy, the time-consuming rate of the proposed method is approximately 1/4 of that of the conventional method.
Footnotes
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This work was supported by the National Natural Science Foundation of China (No. 51905399) and the Scientific Research Starting Foundation of Central South University (No. 202044013).
Appendix 1. Time varying vibration equations
Appendix 2. Constant coefficient vibration equations