
Abstract
Nonlinear vibration arises everywhere in engineering. So far there is no method to track the exact trajectory of a space fractional nonlinear oscillator; therefore, a sophisticated numerical method is much needed to elucidate its basic properties. For this purpose, a numerical method that combines the Fourier spectral method with the Runge–Kutta method is proposed. Its accuracy and efficiency have been demonstrated numerically. This approach has full physical understanding and numerical access; thus, it can be used to solve many types of nonlinear space fractional partial differential equations with periodic boundary conditions.
Introduction
In engineering, a fast estimation of the periodic property of a nonlinear oscillator is much needed. As an exact solution might be too complex to be used for a practical application, many analytical and numerical methods have been used in open literature, for example, the homotopy perturbation method,1-4 the barycentric interpolation collocation method,5-6 the variational iteration method,7-11 and the reproducing kernel method12-16 which are still under development and many modifications were proposed to improve the accuracy.
During the past decades, fractional calculus has been playing more and more important roles in fields of science and engineering.17,18 Many researchers have devoted great energy to study the theory and computation for fractional equations19-25 and fractal vibration systems.26-30 In the study, we consider the following space fractional nonlinear vibration equation31-34

For ∀ r > 0, let H
r
(Ω) = Wr,2(Ω) be Sobolev space with norm ‖ ⋅‖ and semi-norm |⋅|. Define
The β-order Caputo derivative of u(x, t) about x is defined as Based on (2)



Algorithms
Let
First, applying the discrete Fourier transform with respect to the spatial variable x, equation (1) can be turned into the semi-discrete scheme (5)

Noting

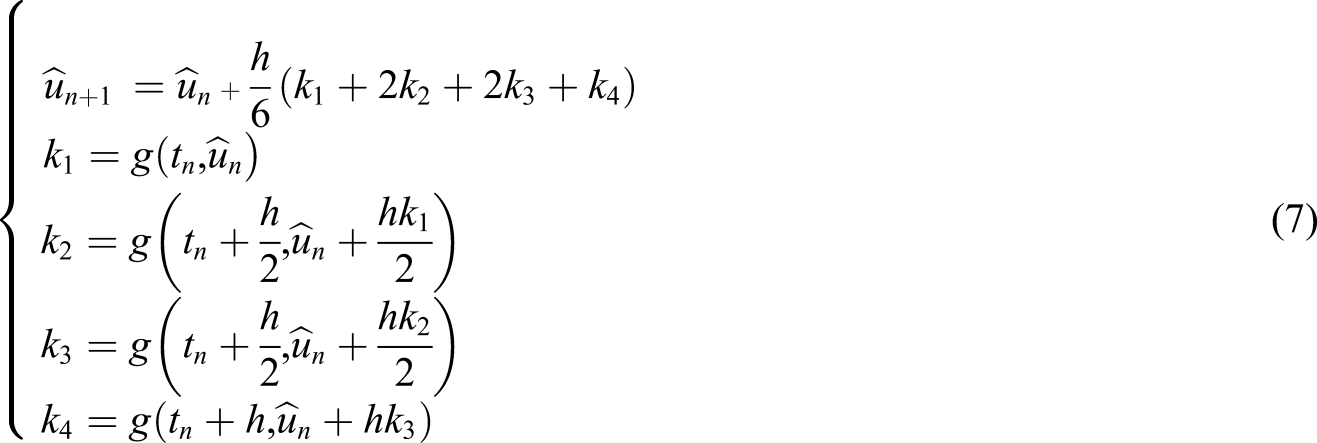
Second, we use the fourth-order Runge–Kutta method to solve the scheme (5), so we can get the solution of equation (1) by using inverse discrete Fourier transform. The fourth-order Runge–Kutta method is the following form
Algorithm is as follows:
Algorithm
Input: L; N; T, M; t = 0: T/M: T; x = L/N∗[−N/2: N/2−1]; k = 2∗pi/L∗[0: N/2−1−N/2: −1]; u = u0(x.)
Defining KDV.m file, function dut=KDV(t,ut,dummy,k,x)
u = u0(x.); ut = fft(u); u = ifft(ut)
dut = −ɛ∗ fft(u. ∗ ifft(i ∗ k. ∗ ut)) − α1 ∗ fft(u. ∗ u. ∗ ifft(i ∗ k. ∗ ut))
− α2 ∗ (i ∗ k).3 ∗ ut − α3 ∗ (i ∗ k). β ∗ ut − α4 ∗ fft(f(x., t.))
Using Runge–Kutta method,
Output: u num = ifft(utsol, [], 2)
Besides, the validation of our work is confirmed by comparing the analytical solutions and the numerical solutions. The root-mean-square error E2, the max error E
∞
, the global relative error GRE, and absolute error are used to measure the accuracy of our method

Numerical simulations
In this section, following the guidance of the discussions in Numerical simulations, we will select appropriate free parameters and present some numerical simulations for preceding cases, which implies that our current method is a satisfactory and efficient algorithm.
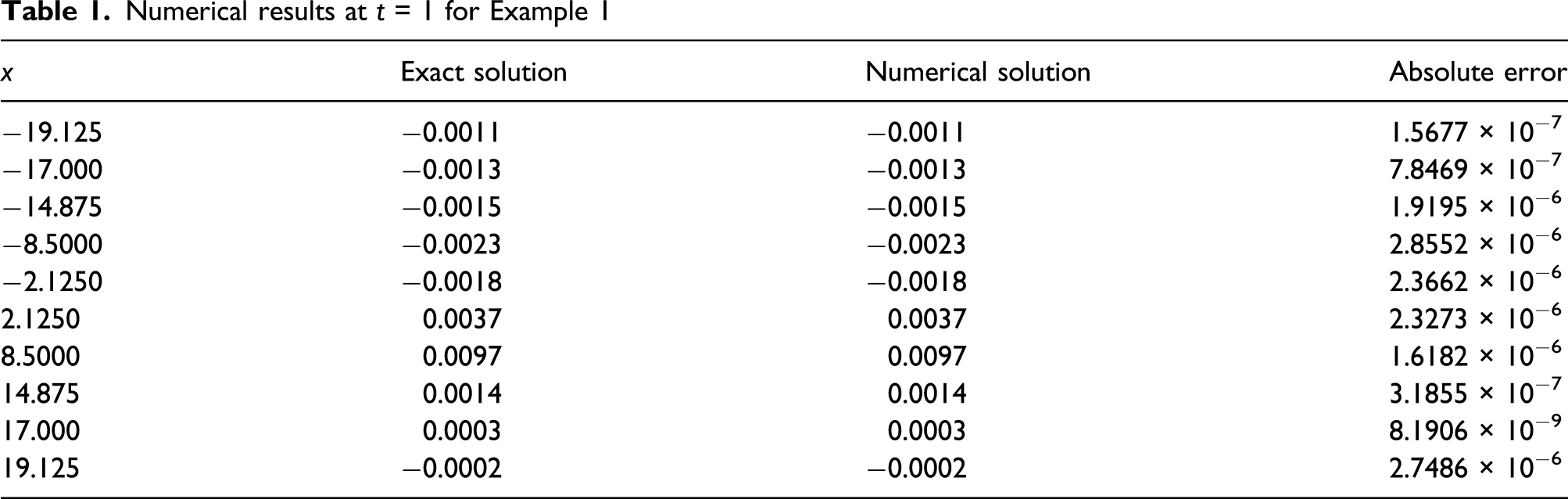
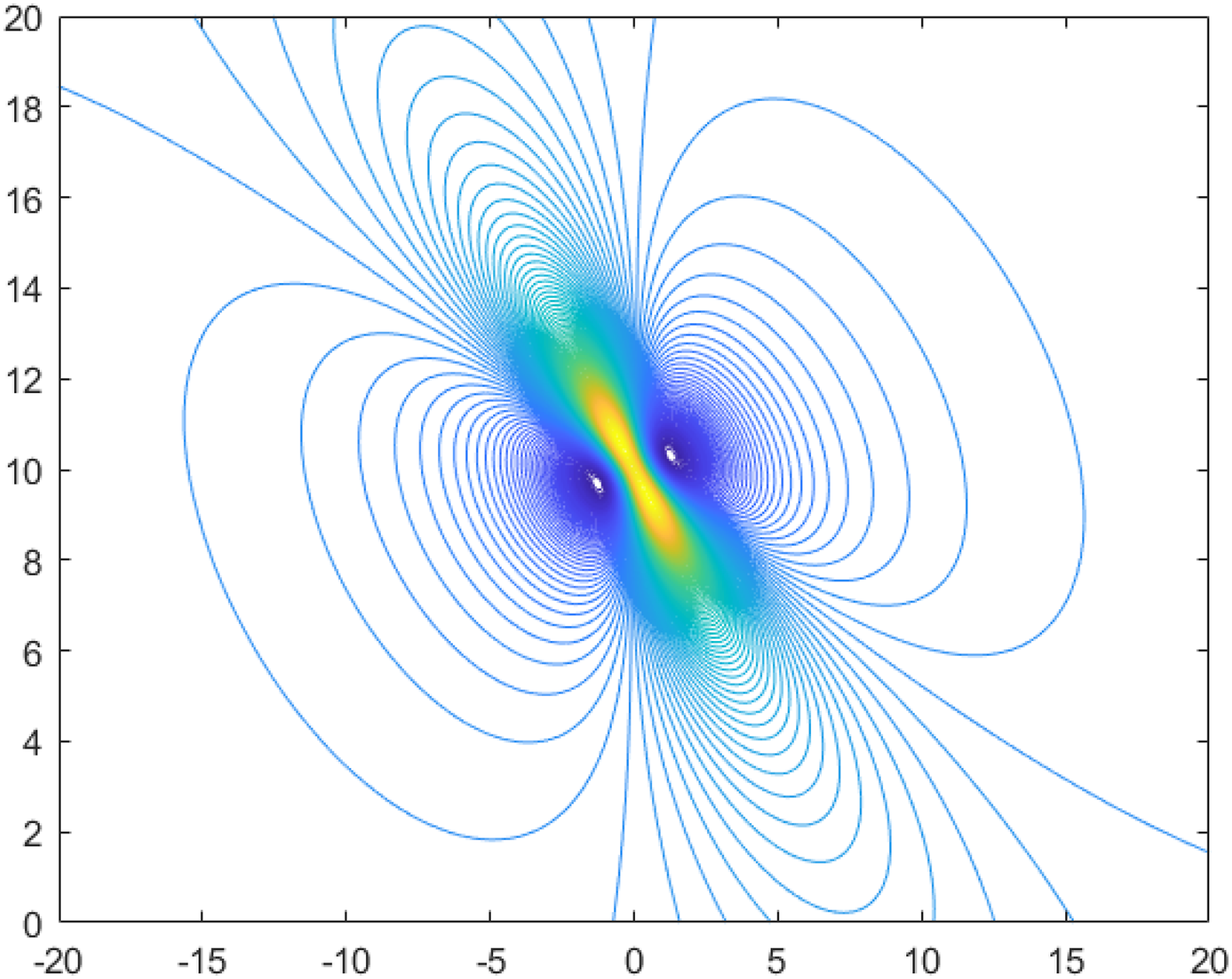
Consider the model (1) with ɛ = 1, α1 = 1, β = 0, α2 = 1, α3 = 0, and α4 = 1, and the source term f(x, t) is determined by (8) consistent with the chosen solution. The exact solution is as follows The numerical solutions are given in Table 1 and plotted in Figures 1–3. Absolute errors are plotted in Figure 4. Absolute errors at t = 3 are plotted in Figure 5. Absolute errors at x = 8.5 are plotted in Figure 6.

Numerical results at t = 1 for Example 1
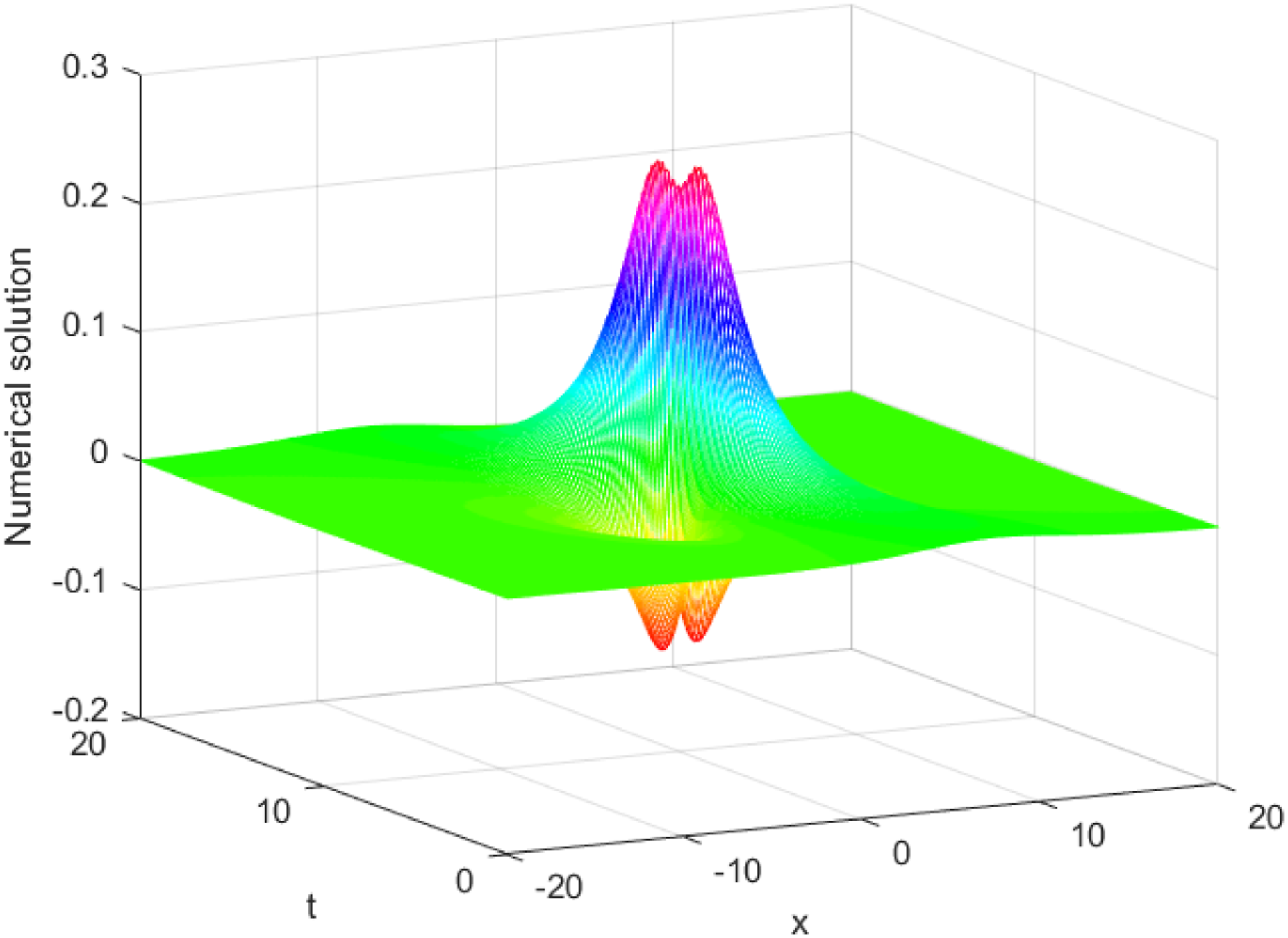
Numerical solution for Example 1.
2D-contour plot for Example 1.
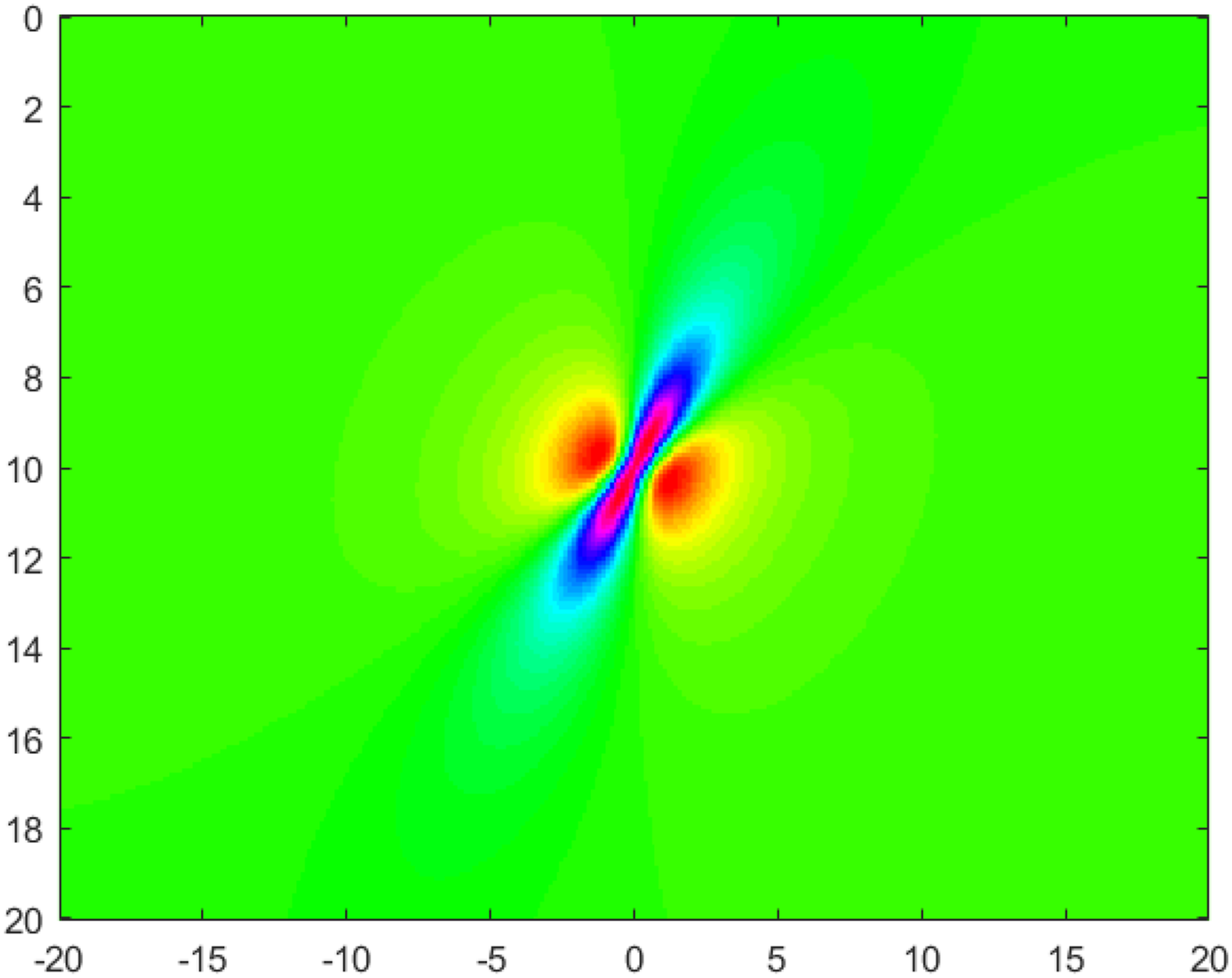
2D-density plot for Example 1.
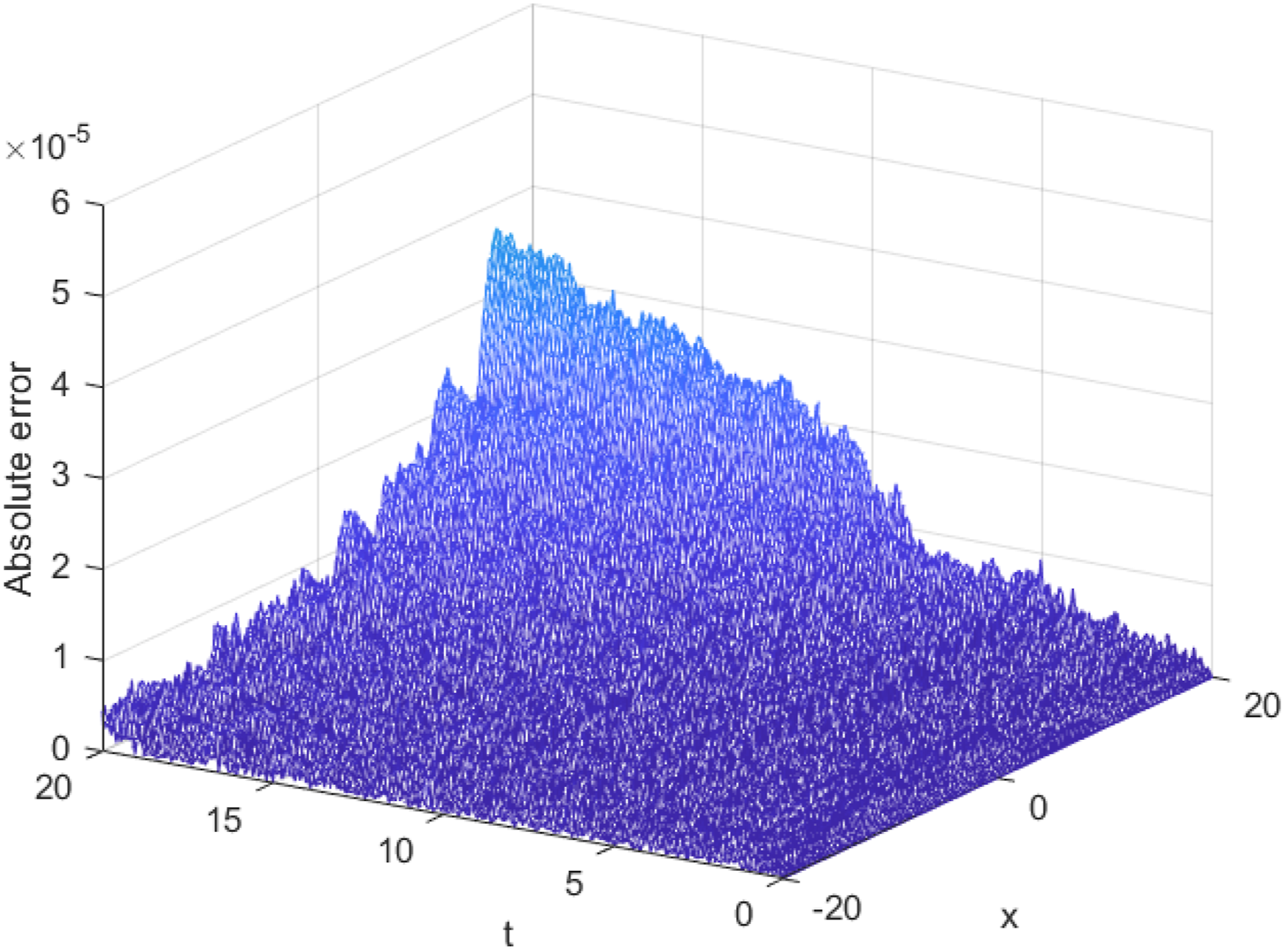
Absolute errors for Example 1.
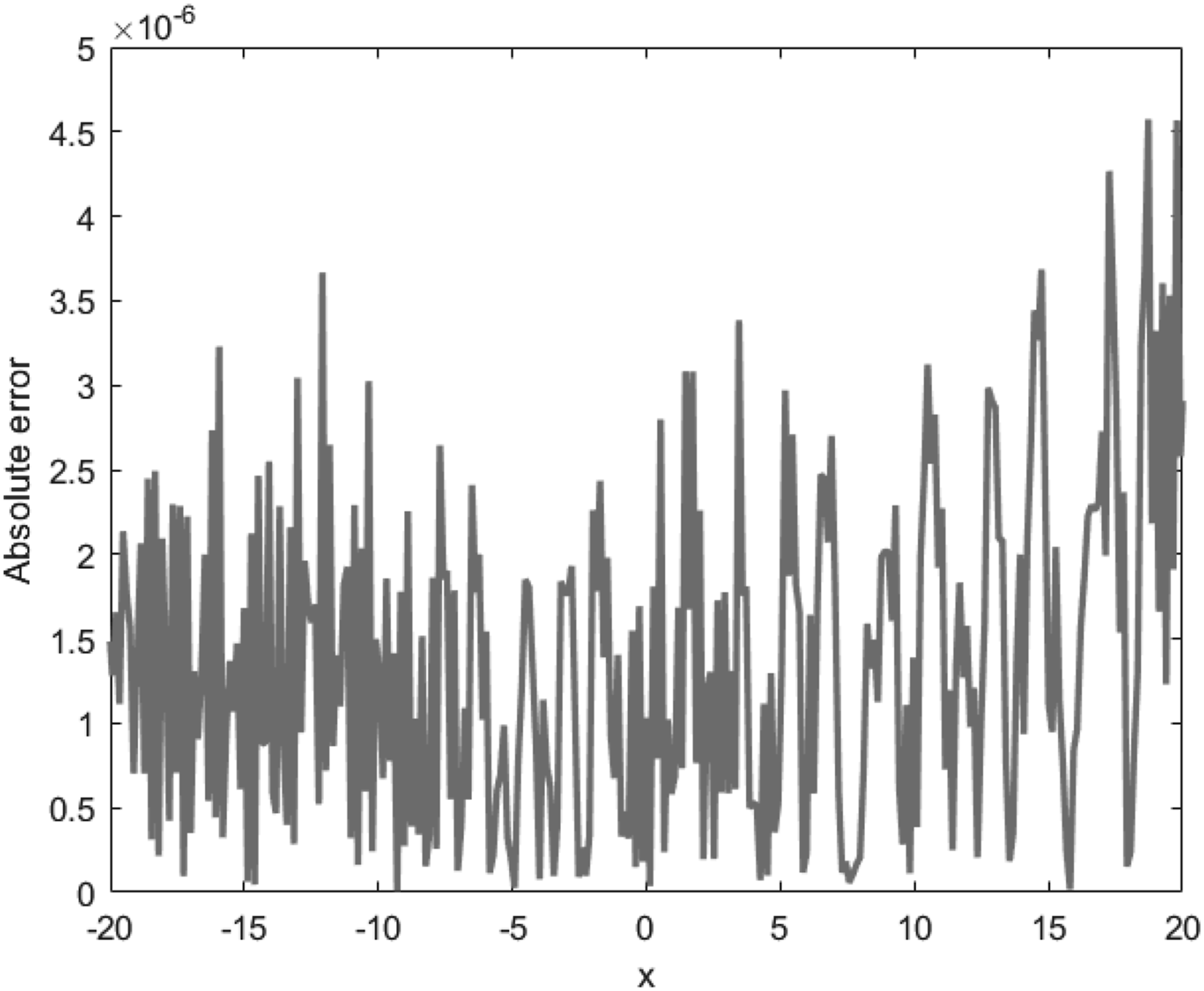
Absolute errors at t = 3 for Example 1.
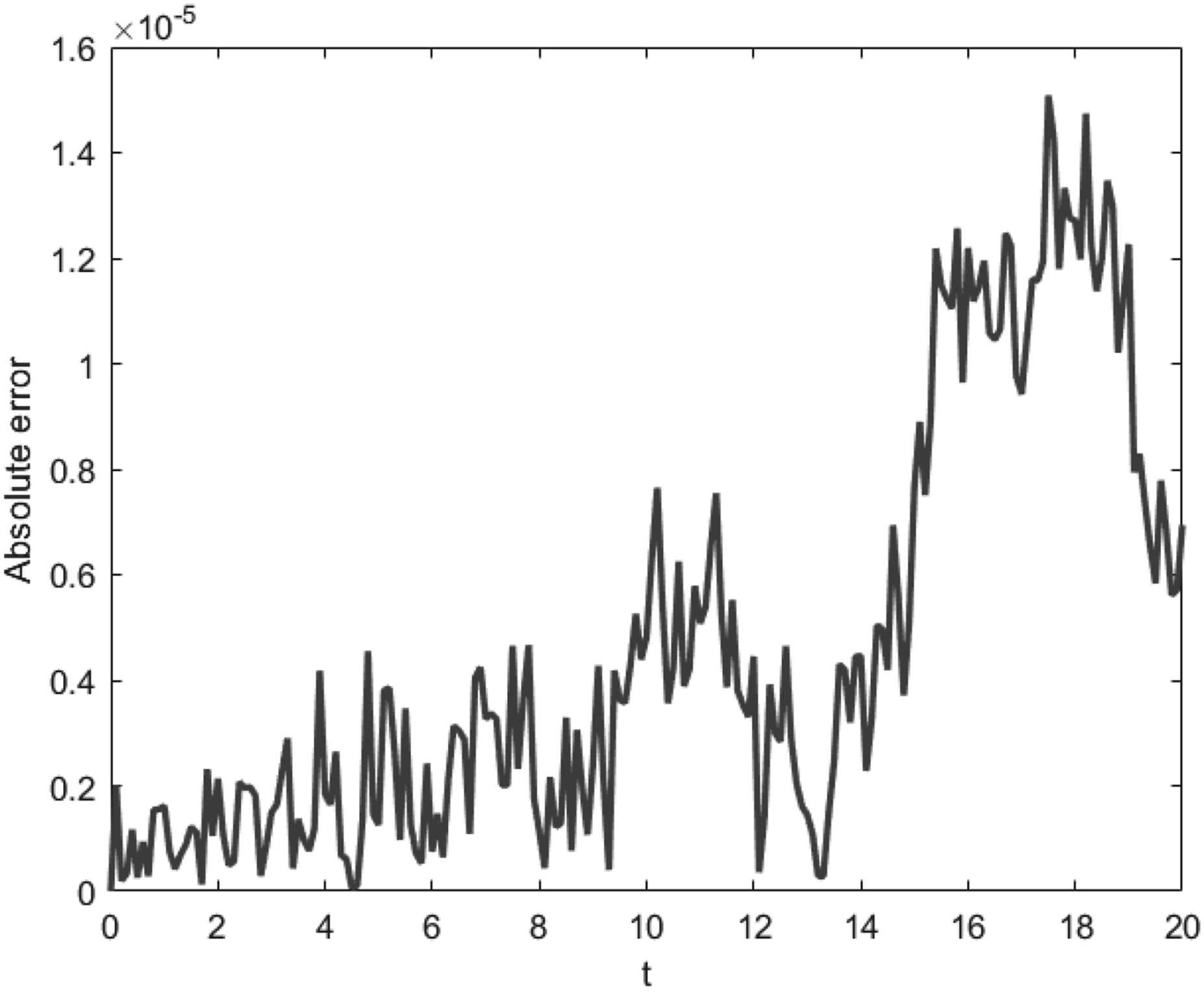
Absolute errors at x = 8.5 for Example 1.
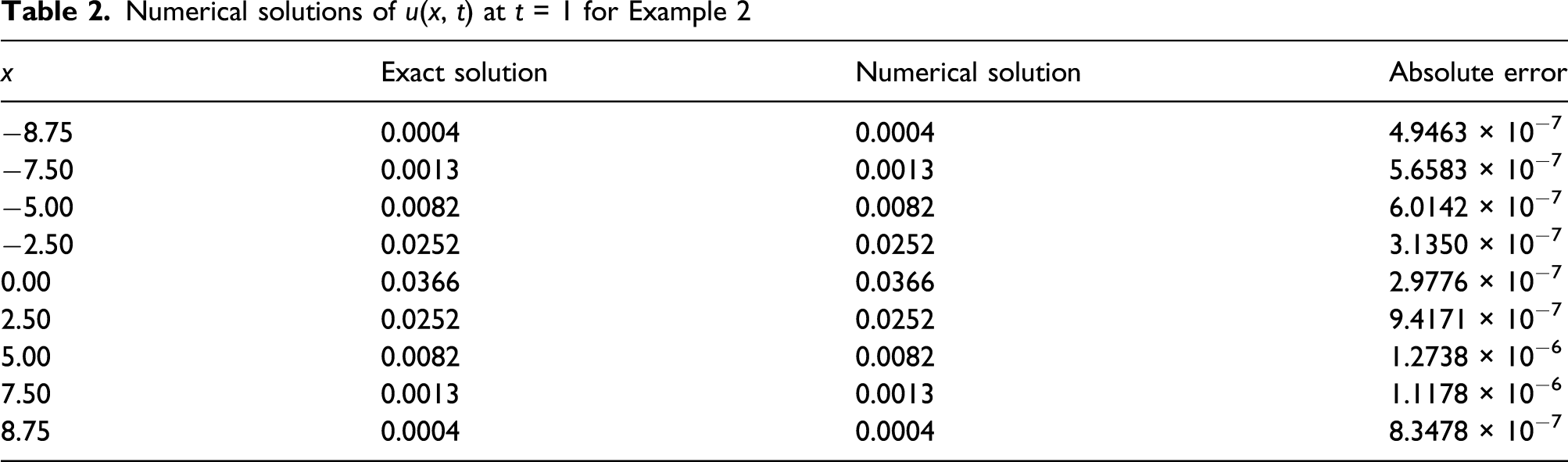
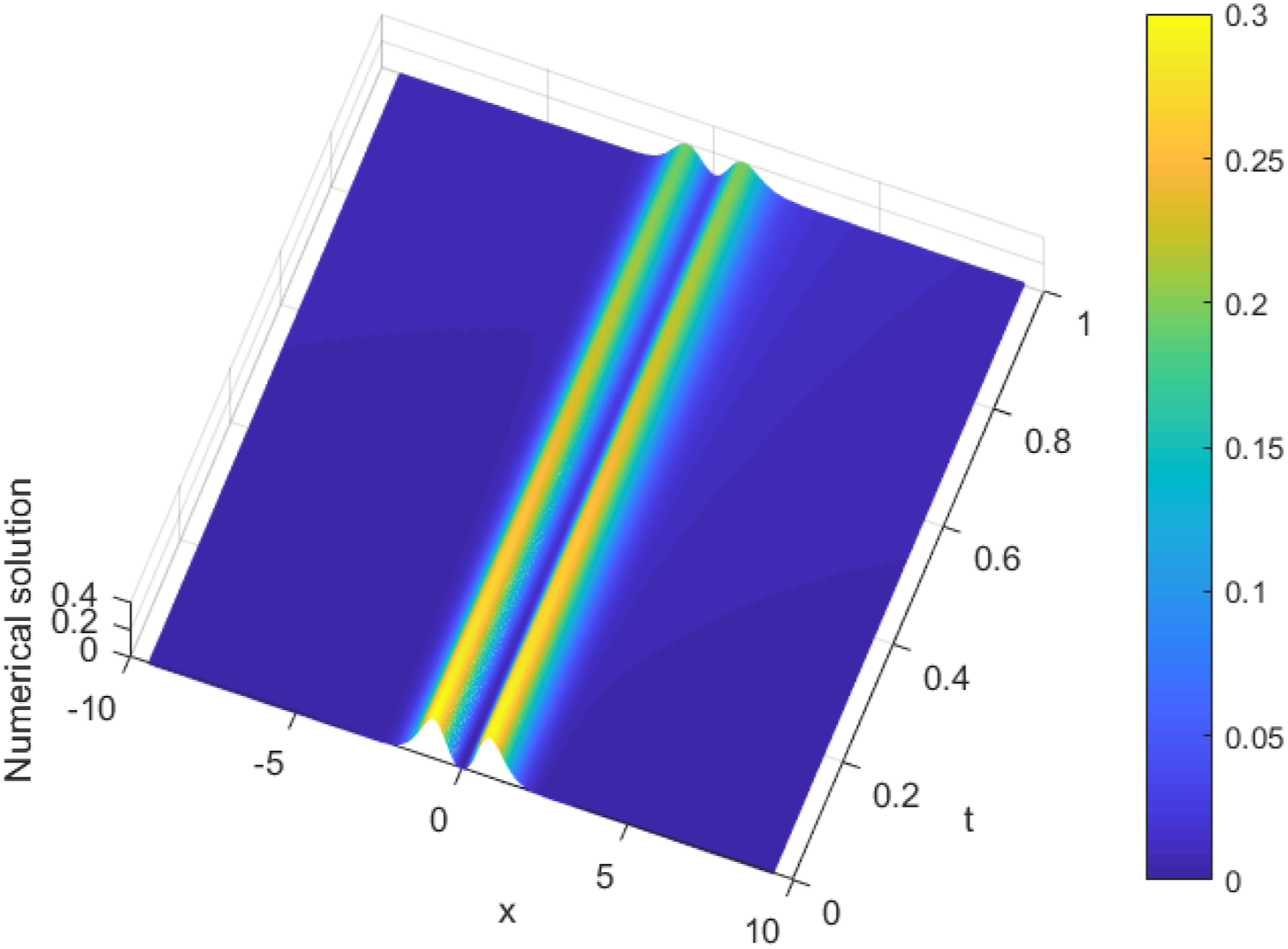
Consider the model (1) with ɛ = 12, α1 = 0, β = 1, α2 = 1, α3 = 1, and α4 = 1. Referring to the numerical experiment in Aksan’s study,35,36 the source term f(x, t) is determined by (9) consistent with the chosen solution. The exact solution is as follows The numerical solutions and analytical solutions are given in Table 2 and plotted in Figures 7 and 8. Absolute errors are plotted in Figure 9. Numerical solutions and analytical solutions at t = 7, 11 are plotted in Figure 10. Absolute errors at t = 1, 10 are plotted in Figure 11. Absolute errors at x = 20 are plotted in Figure 12.
Numerical solutions of u(x, t) at t = 1 for Example 2
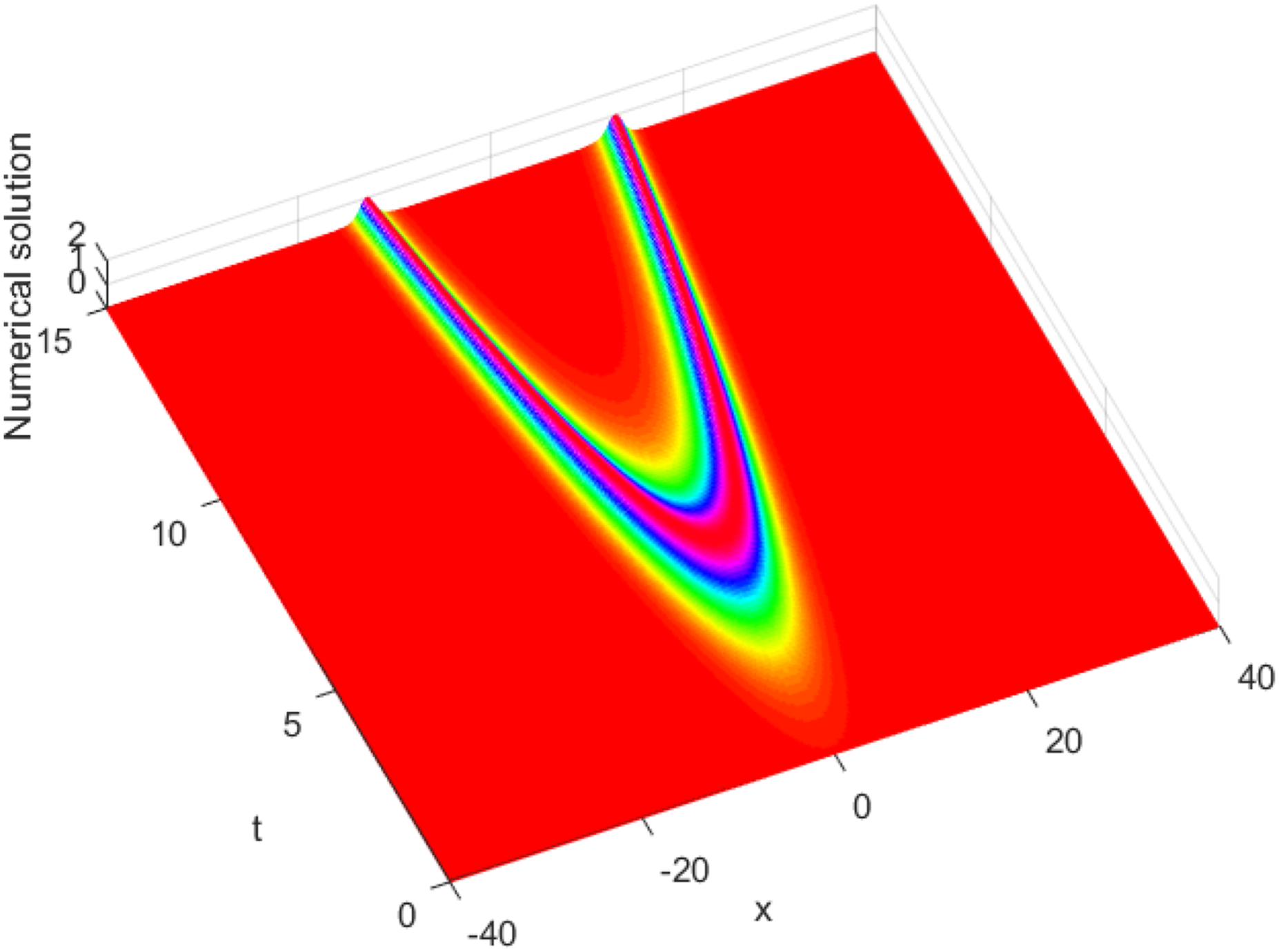
Numerical solution for Example 2.
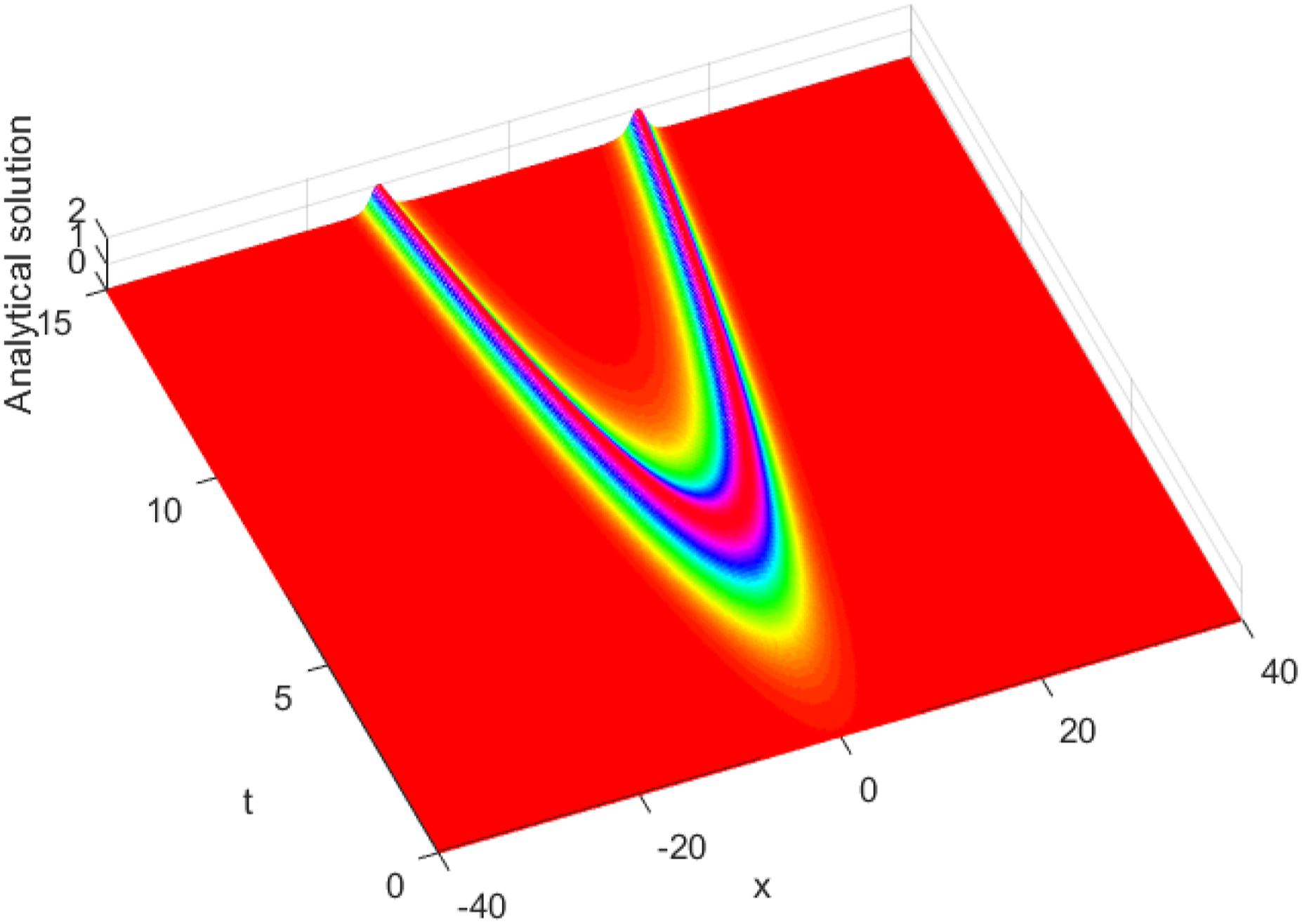
Analytical solution for Example 2.
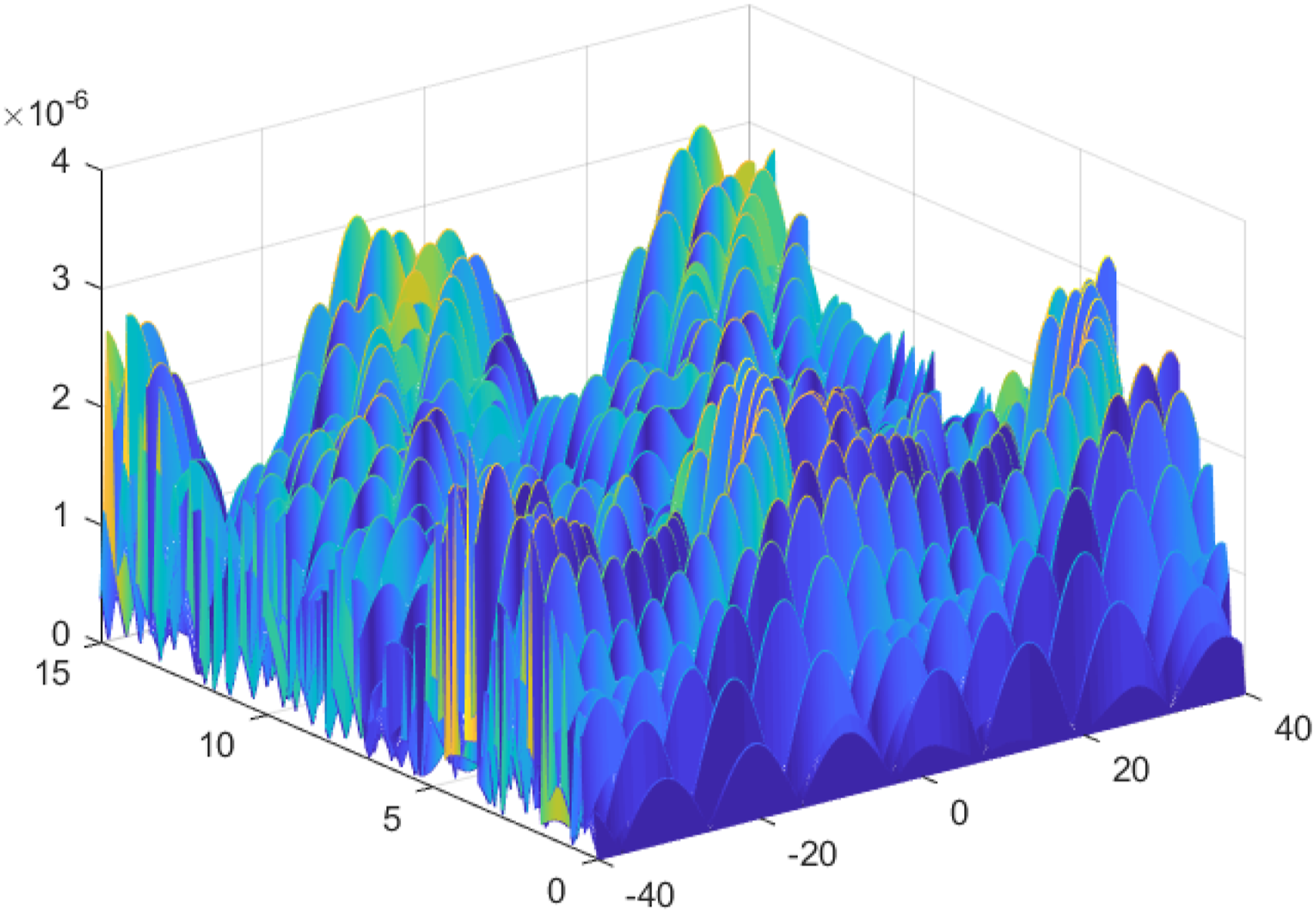
Absolute error for Example 2.
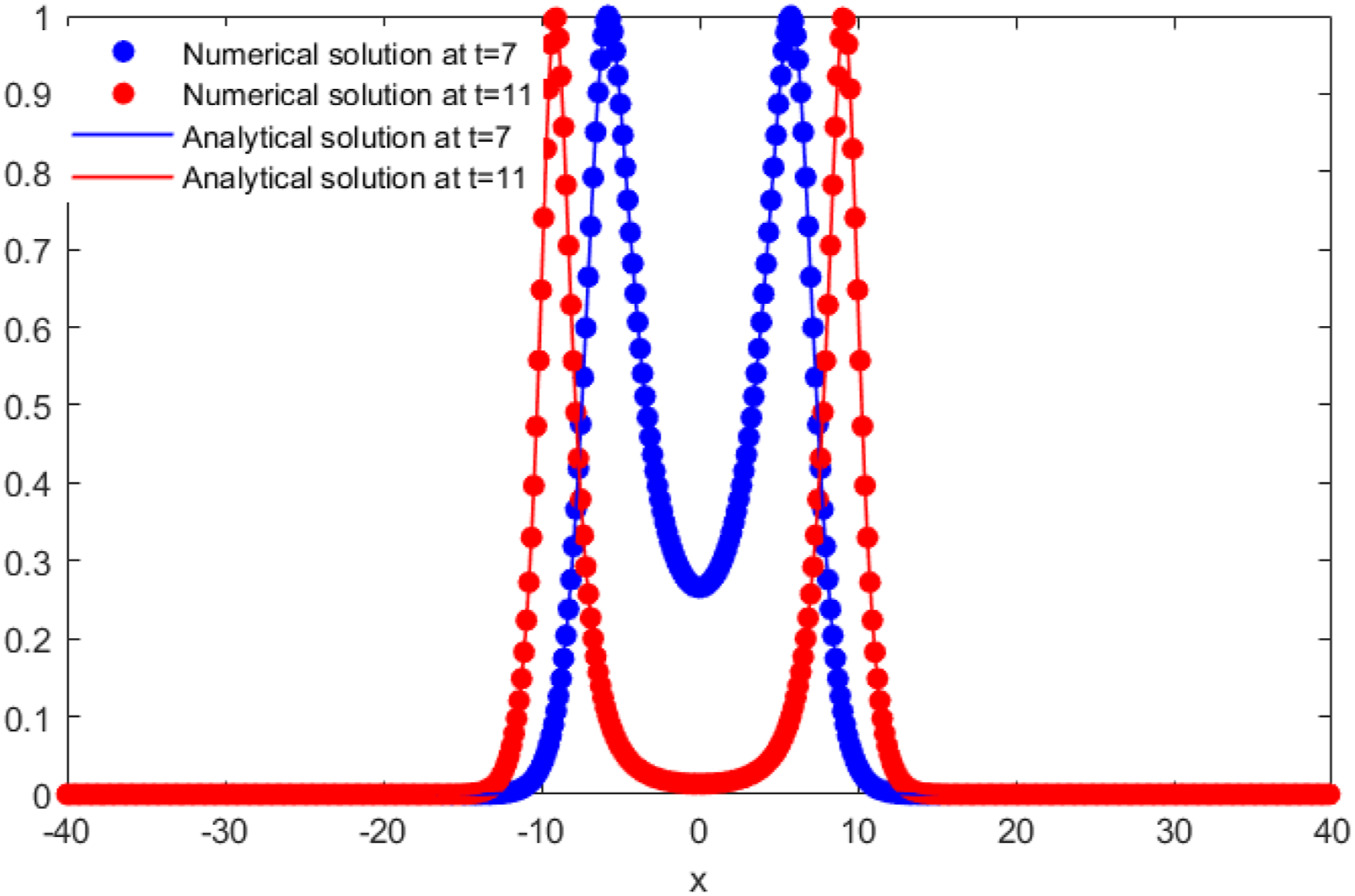
Numerical solution and analytical solution at t = 7, 11 for Example 1.
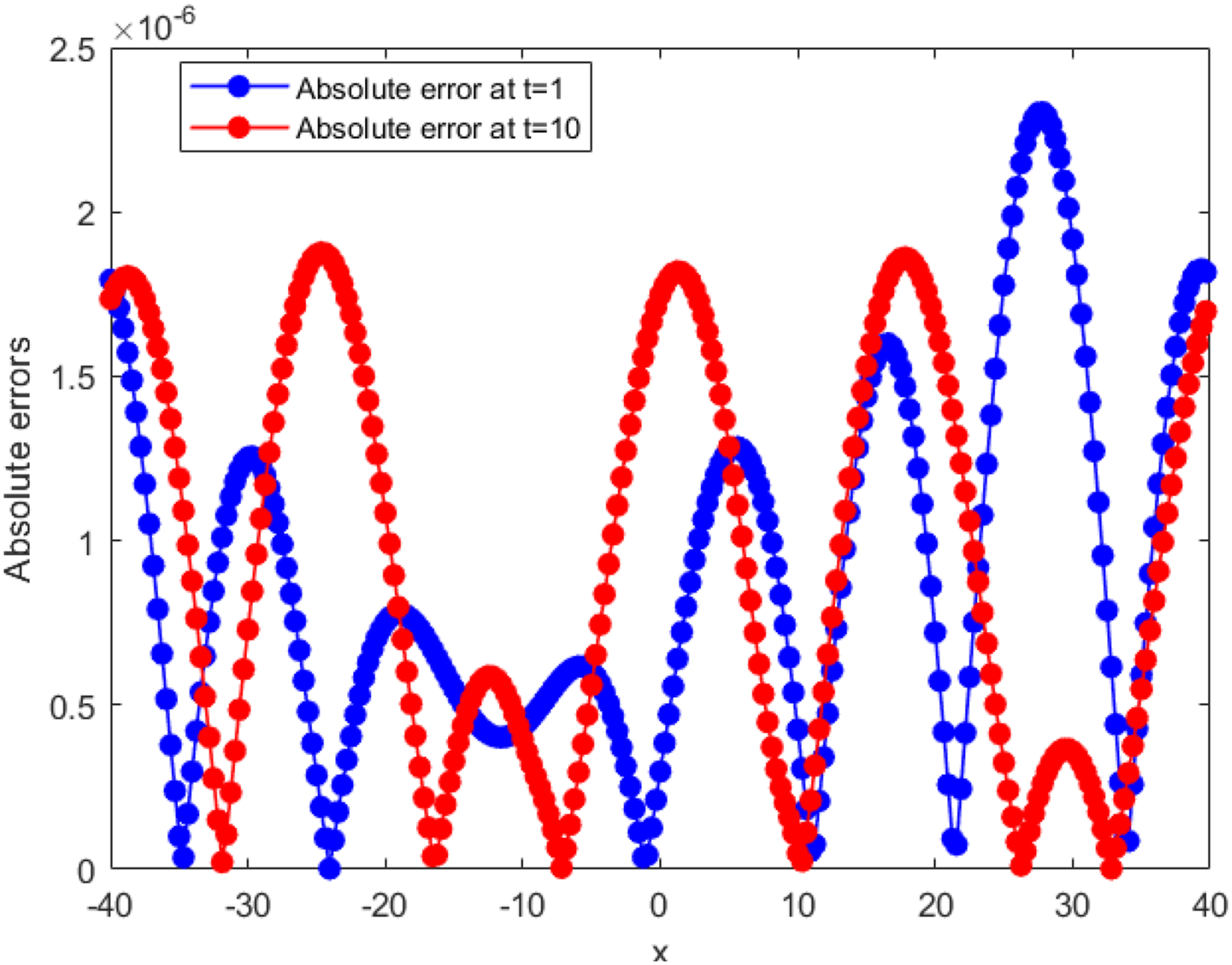
Absolute errors at t = 1, 10 for Example 2.
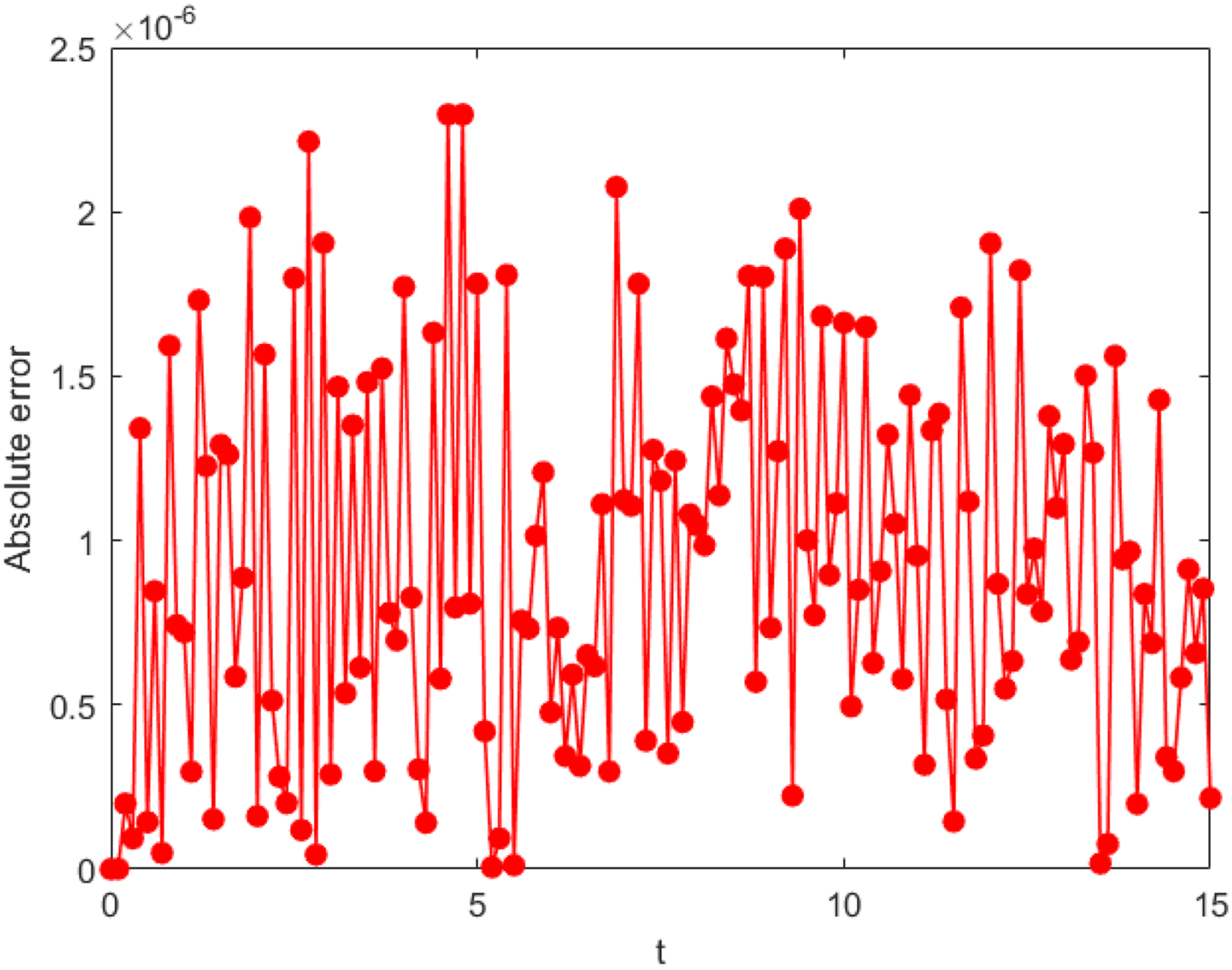
Absolute error at x = 20 for Example 2.
Consider the model (1) with ɛ = −1, α1 = 0, α2 = 0, and α4 = 0 which satisfy the initial conditions By the proposed algorithm, we obtain the numerical solutions which are given in Figures 13–16. Numerical solutions of u(x, t) at α3 = 1, β = 1/4, 5/6 are plotted in Figures 13 and 14. Numerical solutions at β = 6/5, α3 = −10, 10 are plotted in Figures 15 and 16.
Numerical solution at α3 = 1, β = 1/4 for Example 3.
Numerical solution at α3 = 1, β = 6/5 for Example 3.
Numerical solution at α3 = −10, β = 6/5 for Example 3.
Numerical solution at α3 = 10, β = 6/5 for Example 3.
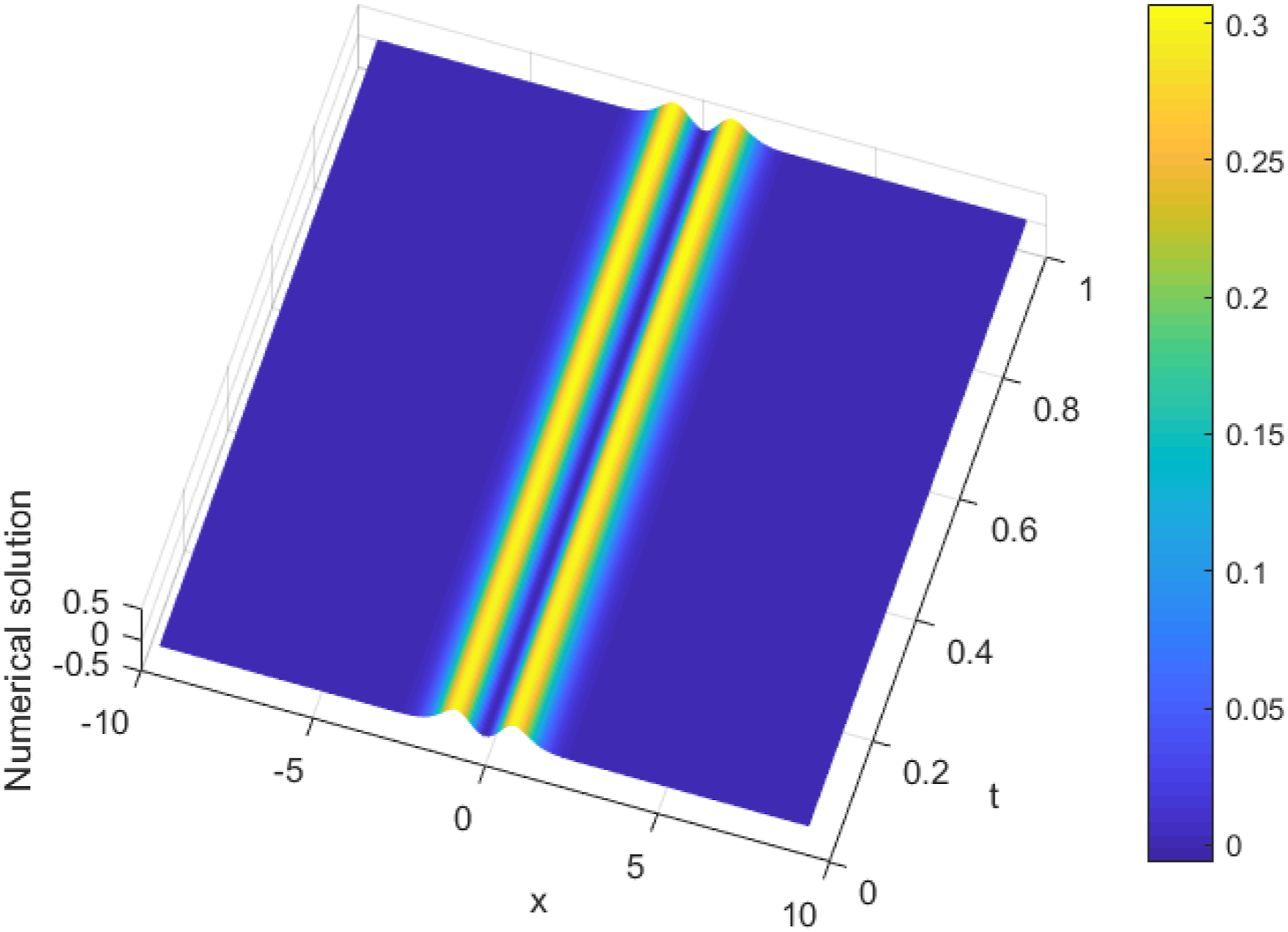
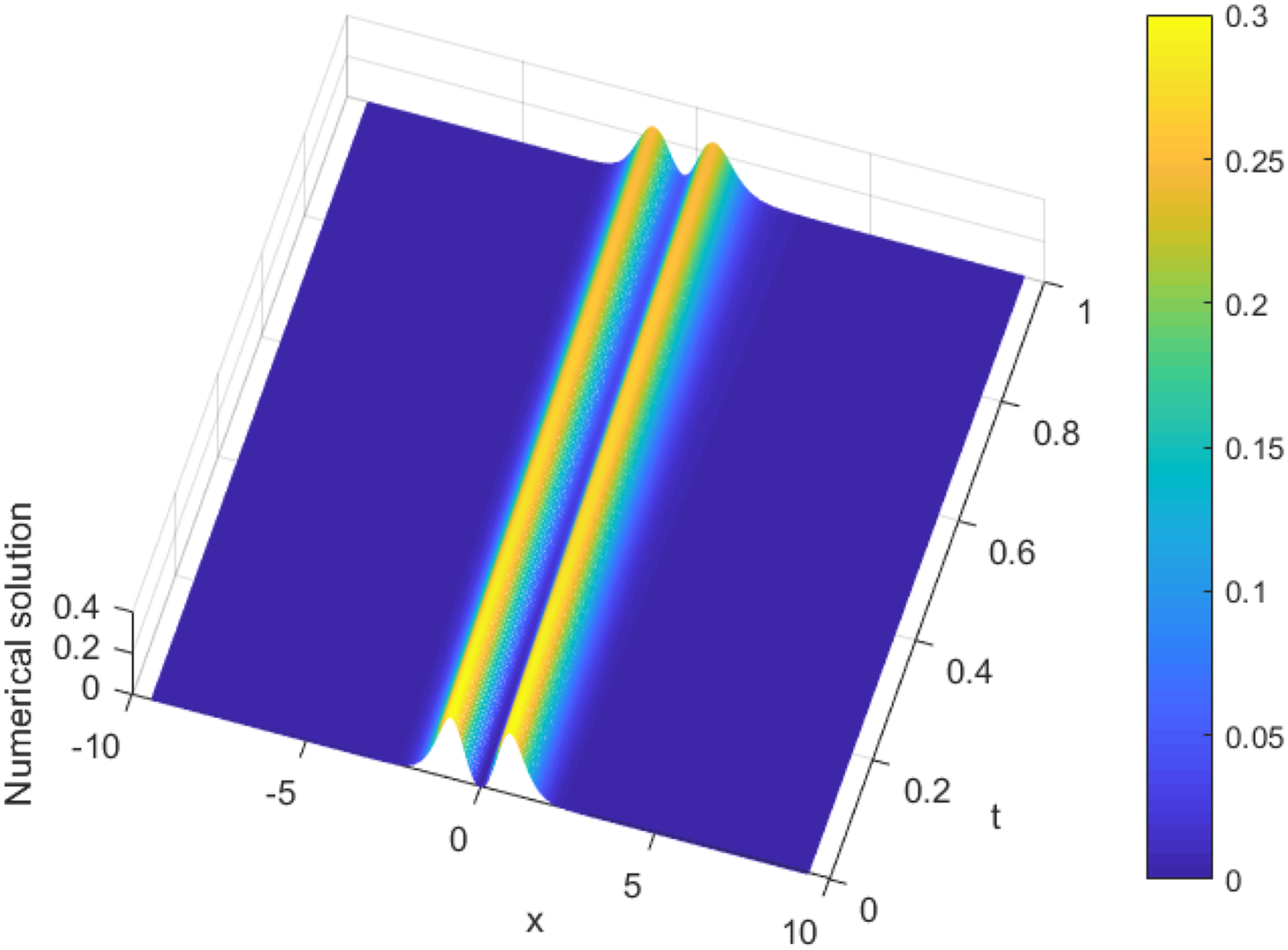
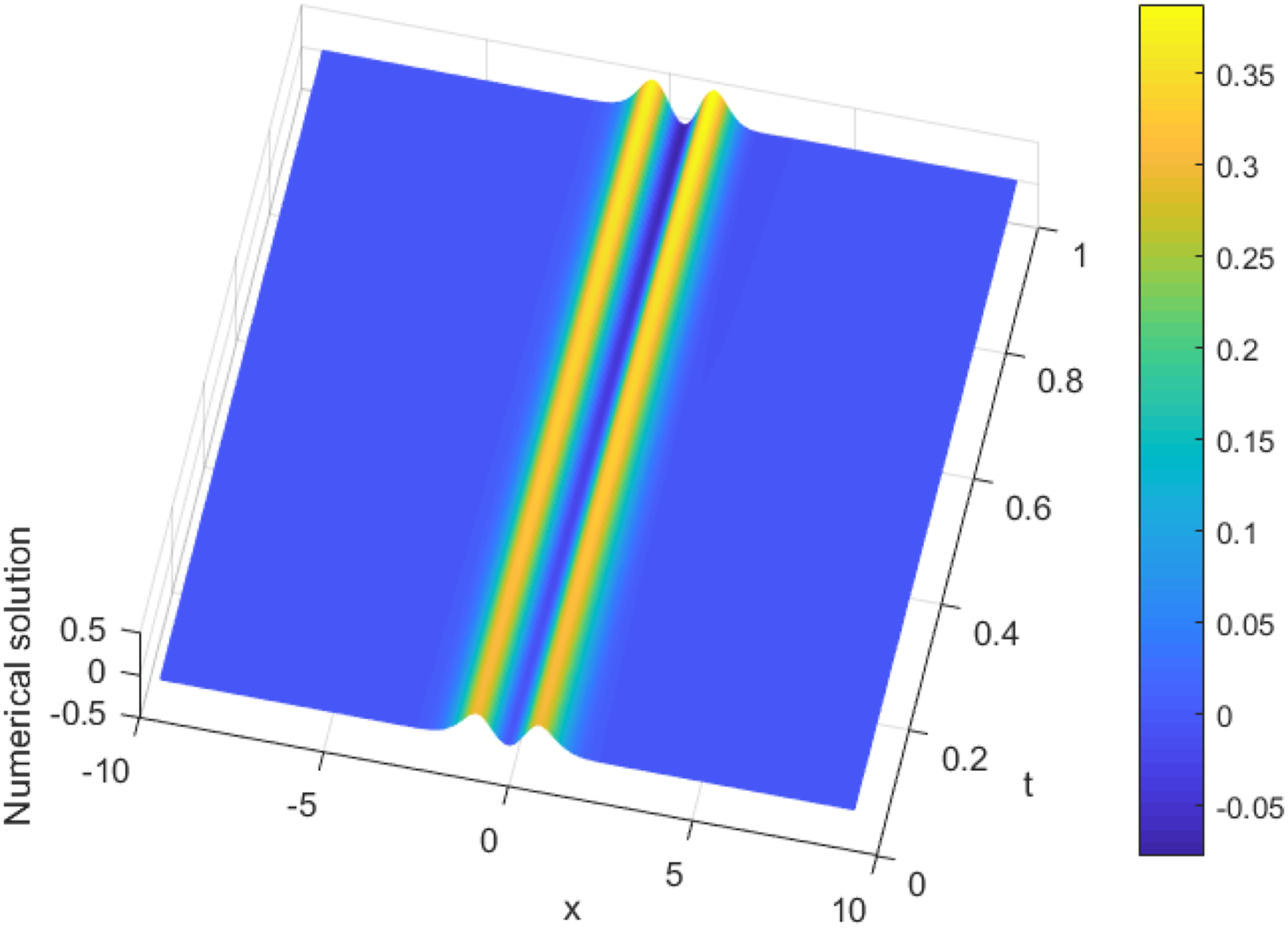
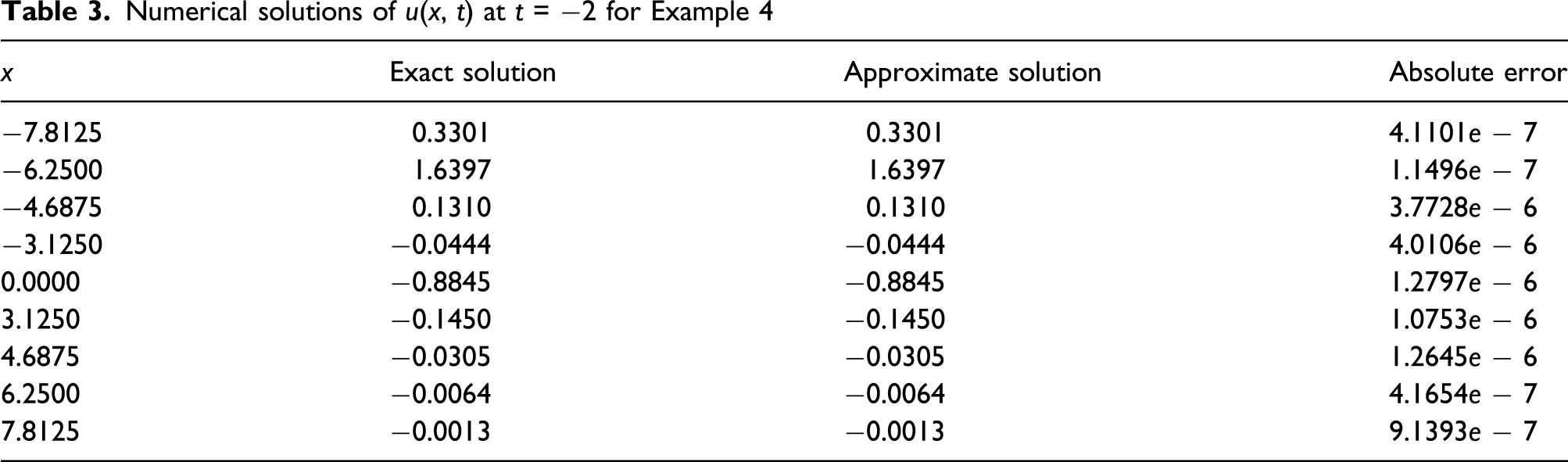
Consider the model (1) with ɛ = −6, α1 = 0.006, β = 1, α2 = 0.001, α3 = t, and α4 = 0, and the source term f(x, t) is determined by (10) consistent with the chosen solution. The exact solution is as follows Numerical solutions, analytical solutions, and absolute errors are given in Table 3 and Figures 17–20.
Numerical solutions of u(x, t) at t = −2 for Example 4
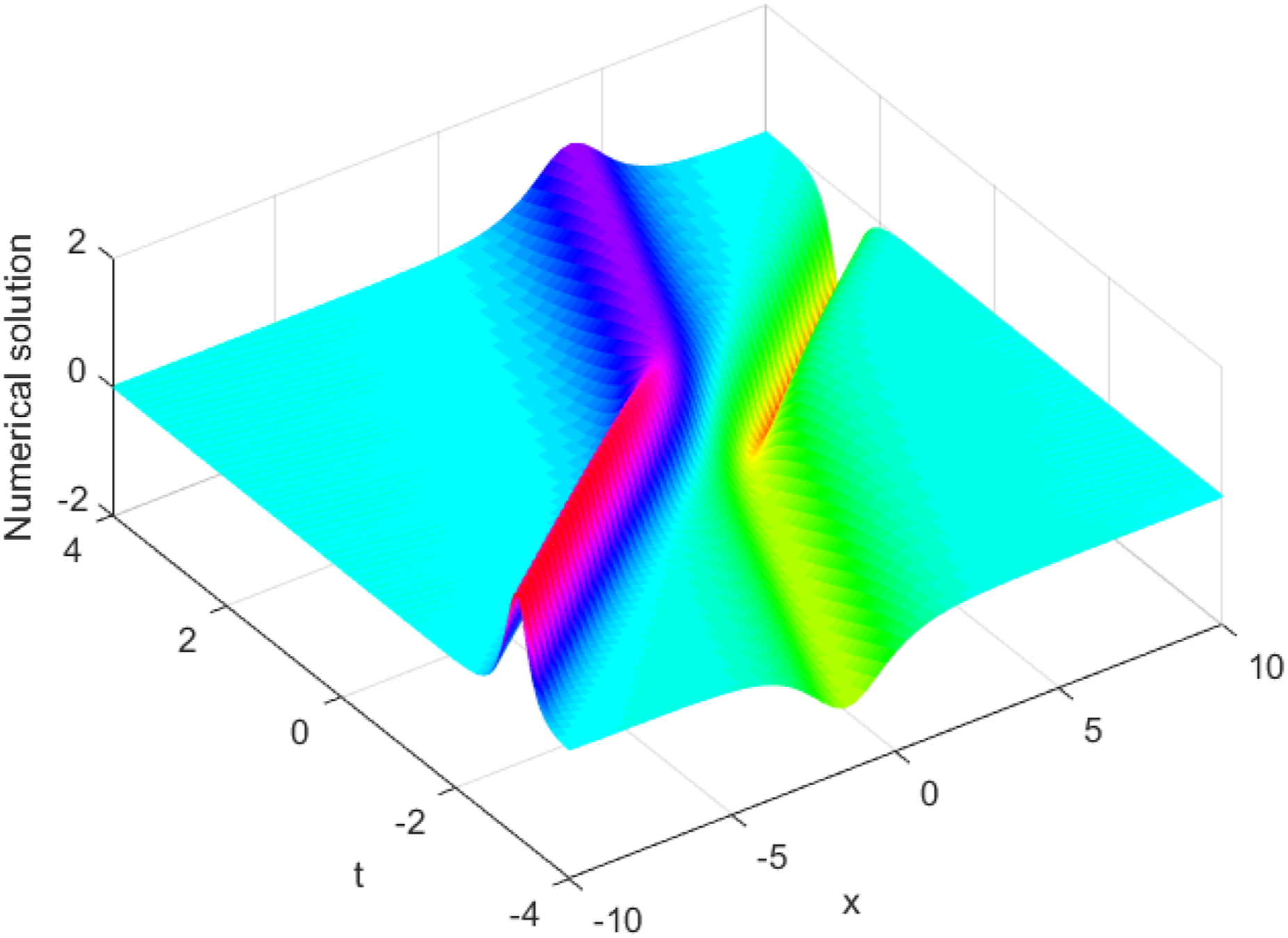
Numerical solution for Example 4.
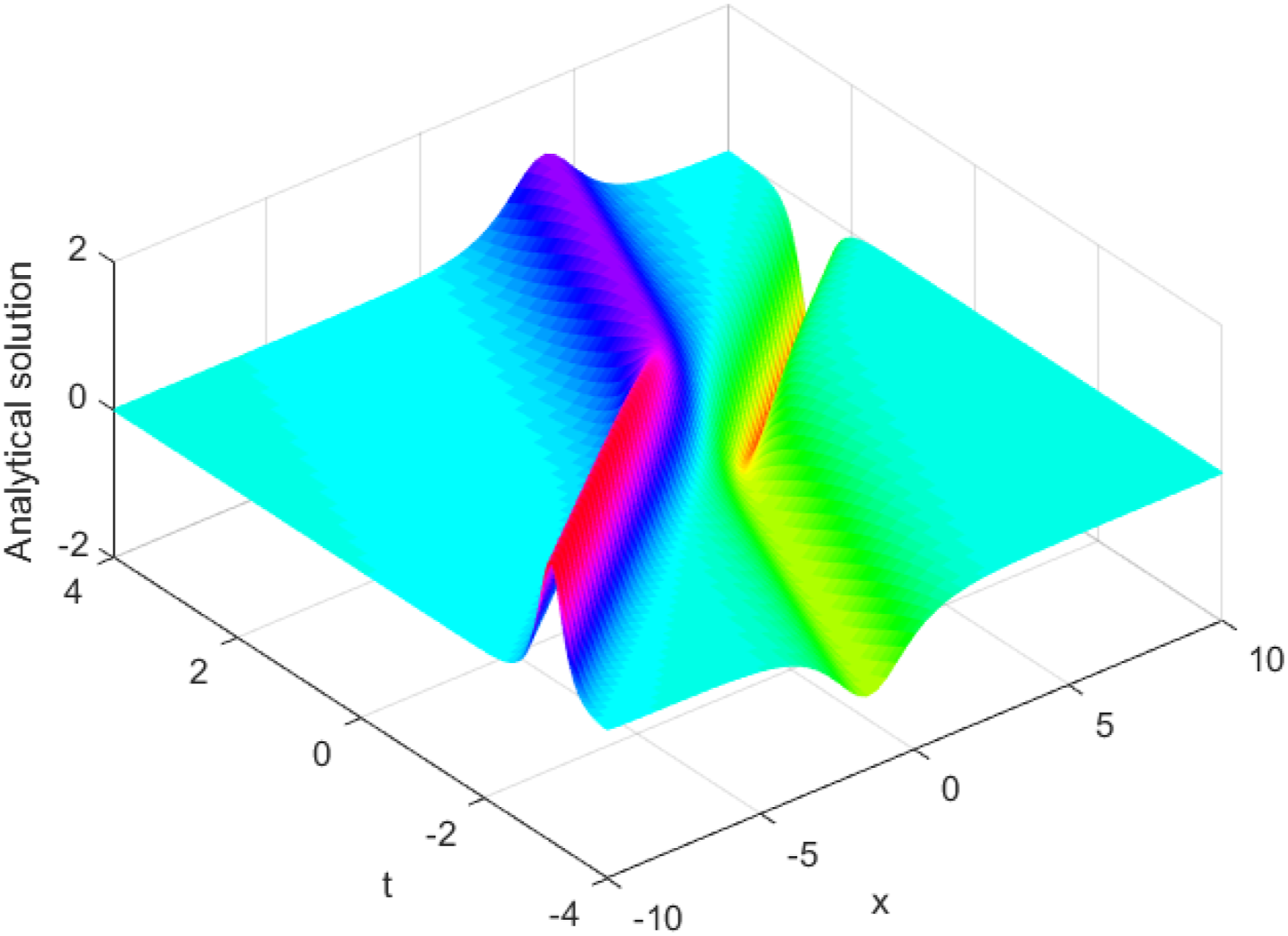
Analytical solution for Example 4.
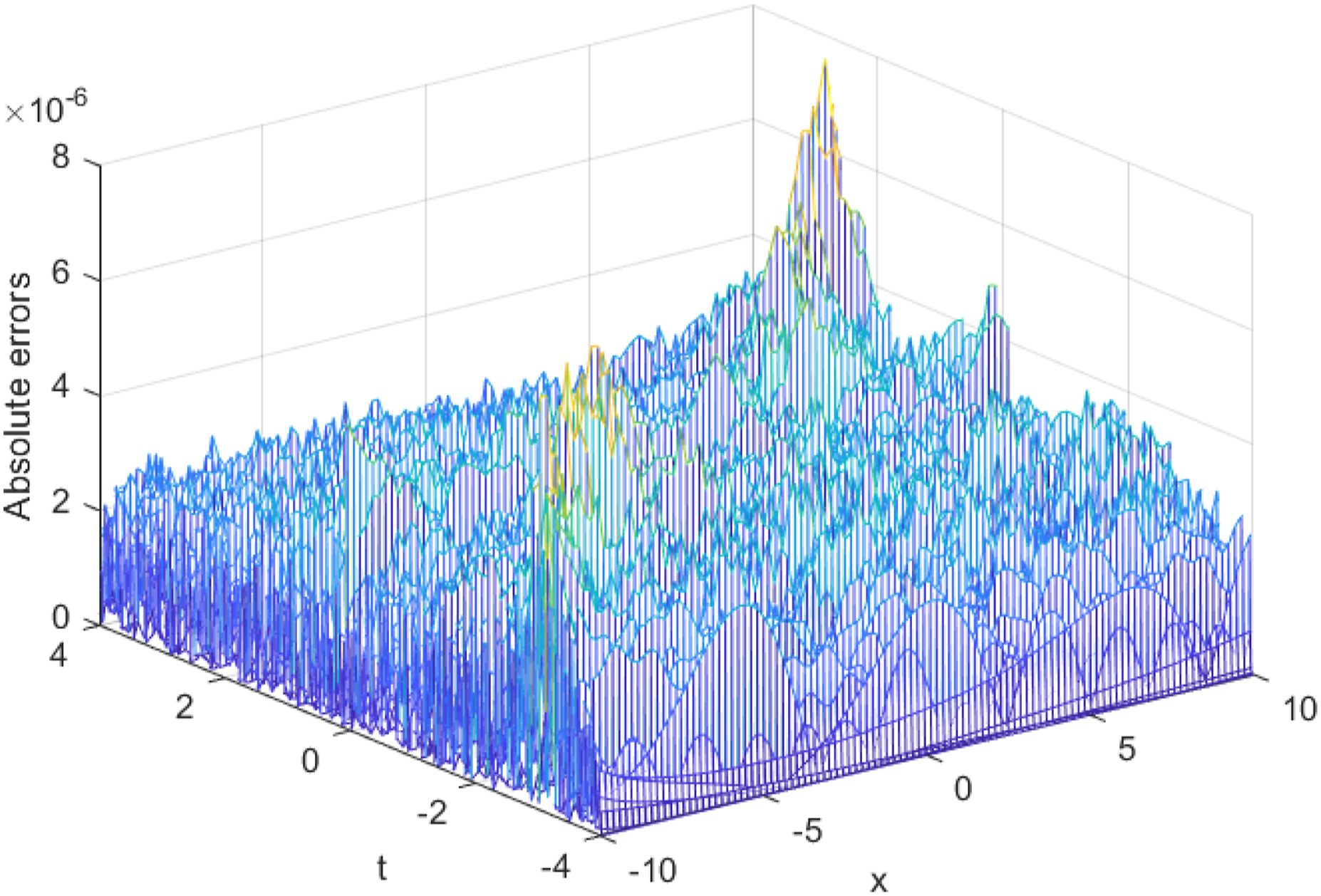
Absolute error for Example 4.
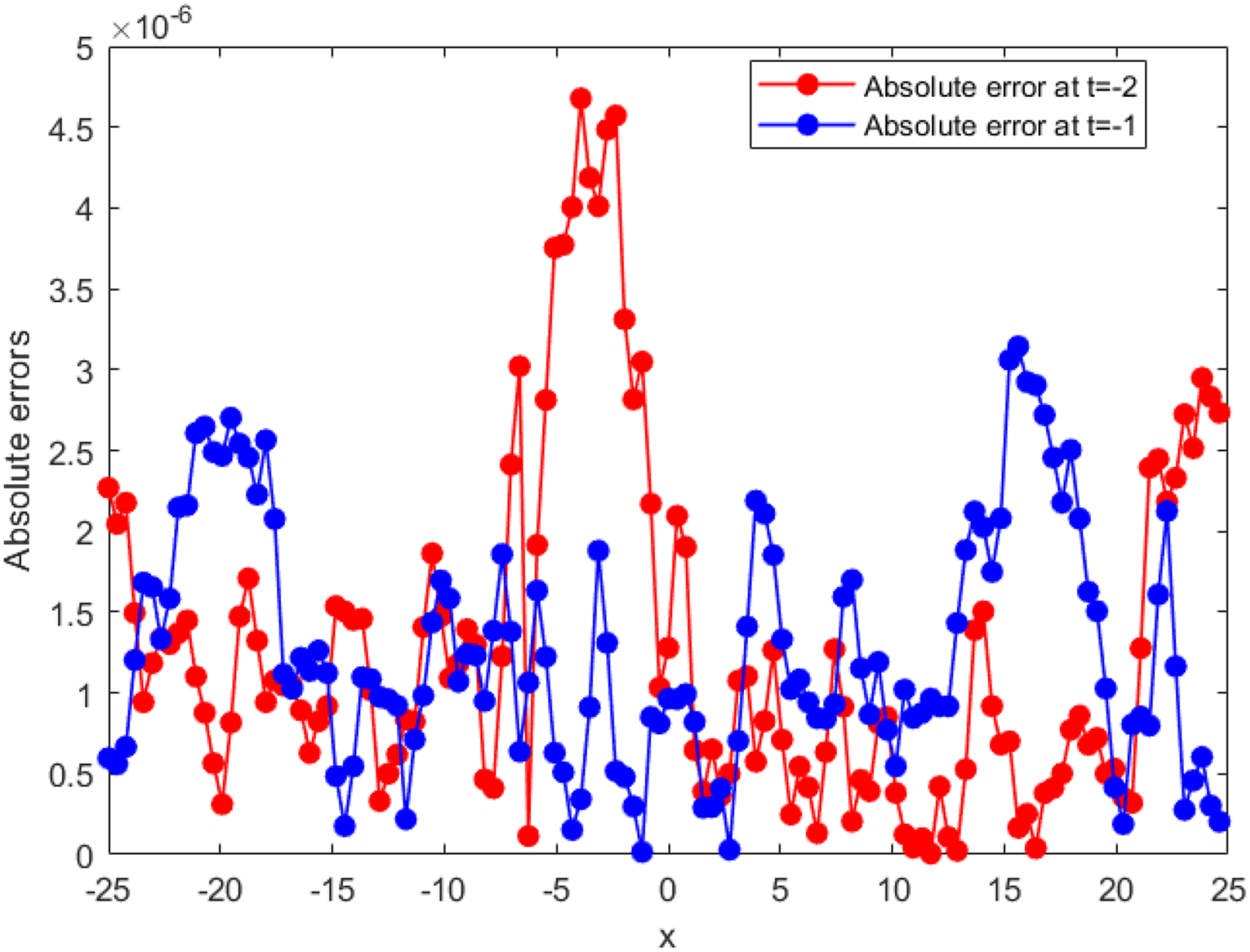
Absolute error at t = −2, −1 for Example 4.
Consider the model (1) with ɛ = 1, α1 = 0, β = 0, α2 = 4.84e − 4, and α3 = α4 = 0. The exact solution is as follows By the present method, we obtain the numerical results which are given Tables 4–6. In Tables 4 and 5, we show the numerical solutions by the present method, hybrid numerical method, Galerkin B-spline finite element method, ANS, HBI, and the exact values at the selected notes for t = 0.005, 0.01.
Comparison of numerical solution and exact solution at t = 0.005 for Example 5.

Comparison of numerical solution and exact solution at t = 0.01 for Example 5.

All kinds of errors for Example 5.

Conclusions and remarks
In the article, we propose a Fourier spectral Runge–Kutta method for a class of space fractional nonlinear vibration equation. A numerical method that combines the Fourier spectral method with the Runge–Kutta method is proposed to study a class of space fractional nonlinear vibration equation with periodic boundary condition. The accuracy and efficiency of the proposed method have been demonstrated by the numerical results. This approach has general meanings and thus can be used to solve many same types of nonlinear space fractional partial differential equations in science and engineering. Comparisons of the obtained solutions and numerical results show that this method is effective and convenient. Some new numerical results are shown by using this new approach, and the results have a good agreement with theoretical results.
Footnotes
Acknowledgements
We would like to express our deep thanks to you and the anonymous reviewer whose valuable comments and suggestions helped us improve this article greatly.
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This work is supported by Inner Mongolia Natural Science Foundation under Grant No. 2021MS01009 and 2019MS07008, Inner Mongolia Medical University Excellent Teacher Project under Grant No. NYJTXX201915.
Data availability
The data used to support the findings of this study are available from the corresponding author upon request.