
Abstract
Three models are investigated in this paper, including the generalized nonlinear Schrödinger equation with distributed coefficients, the time-dependent-coefficient nonlinear Whitham–Broer–Kaup system and the fractional nonlinear vibration governing equation of an embedded single-wall carbon nanotube. With an analytical method, the aim of this paper is to exactly solve these models. As a result, some explicit and exact solutions which include hyperbolic function solutions, trigonometric function solutions and rational solutions are obtained. To gain more insights into the obtained exact solutions, dynamical evolutions with nonlinear vibrations of the amplitudes are simulated by selecting oscillation functions, noises, coefficient functions and fractional orders. It is graphically shown in the dynamical evolutions that the nonlinear vibrations of the amplitudes are influenced not only by the coefficient functions but also by the oscillation functions, noises and fractional orders.
Keywords
Introduction
As pointed out by Christov, 1 a wave in classical continuum physics is a mechanical disturbance caused maybe by the motion of atoms and molecules or the vibration of a lattice structure. From a mathematical point of view, we can understand a wave as a specific type of solution of an appropriate partial differential equation (PDE) modeling a general problem arising in practical applications. It is the hyperbolic property of a given PDE that leads to the possibility of wave solutions. Generally, we associate the solitary solution with such a solution which not only represents a wave of permanent form but also is localized so that it decays or approaches a constant at infinity. If the solution is a periodic function, then we call it periodic solution which reflects the regularity of the system.
It is well known that nonlinear phenomena are everywhere in the real world, and nonlinear PDEs are often used to describe these nonlinear phenomena. Usually, people restore the dynamical evolutions of exact solutions of nonlinear PDEs to gain more insights into the essence behind the nonlinear phenomena for further applications. In the past several decades, many effective methods for exactly solving nonlinear PDEs have been presented.2–13 Among them, the exp-function method 7 proposed by He and Wu is an effective mathematical tool for constructing wave solutions, solitary solutions and periodic solutions. Recently, the analytical investigation of nonlinear vibrations has received considerable attention.14–17 However, exact analytical solutions of nonlinear vibration equations are hard to find out in most cases. The present paper is motivated by the desire to show the analytical method 8 can be used for some special types of nonlinear vibration equations. For this purpose, we shall consider three models in this paper, they are the generalized nonlinear Schrödinger equation with distributed coefficients,9,18 the time-dependent-coefficient nonlinear Whitham–Broer–Kaup system19,20 and the fractional nonlinear vibration governing equation which can be thought of as a generalized form in the fractal space of the model for an embedded single-wall carbon nanotube. 16 Since carbon nanotube is discontinuous and to be more exactly the classical continuum mechanics becomes invalid, then the fractal calculus becomes optional (see those in literature21–25 for examples). It is because that the fractal calculus is extremely effective to deal with phenomena in hierarchical or porous media. 23
The first model to consider is the nonlinear generalized Schrödinger equation with gain in the form used in nonlinear fiber optics9,18

The second model to consider is the time-dependent-coefficient nonlinear Whitham–Broer–Kaup system19,20


For a single-wall carbon nanotube of length


The rest of the paper is organized as follows. In the next section, we construct explicit and exact solutions of equations (1) to (4) by an analytical method. In the subsequent section, we simulate the dynamical evolutions with nonlinear vibrations of some obtained solutions. The final section concludes this paper.
Exact solutions
In this section, the analytical method 8 combined with variable-coefficient functions is first employed to construct exact analytical solutions of equations (1) to (3) and then be generalized for solving equation (4) with fractal derivative.
Let us begin with the nonlinear generalized Schrödinger equation (1). Firstly, we make the transformation



Secondly, we suppose that


Here and thereafter the prime denotes the derivative with respect to the independent variable.
Substituting equation (8) along with equation (9) into equations (6) and (7) and collecting all terms with the same order of




Finally, from equations (5) and (10) we obtain exact solutions of equation (1)

In what follows, from equation (14) we derive some special solutions of equation (1). Considering a special case of equation (13), we set






Under the constraint

Finally, from equations (14) to (21), we obtain five pairs of exact solutions of equation (1)


We next consider the time-dependent-coefficient nonlinear Whitham–Broer–Kaup system in equations (2) and (3). We suppose that


Substituting equations (25) and (26) along with equation (9) into equations (2) and (3) and collecting all terms with the same order of






We, therefore, obtain exact solutions of equations (2) and (3)

If we suppose that


It is easy to see that equations (31), (35) and (36) have solutions



We finally consider the fractional nonlinear vibration governing equation (4). By the similar way as above, we suppose that


Substituting equation (39) along with equation (40) into equation (4) and collecting all terms with the same order of

With the help of equations (39), (41) and (42), we obtain the following exact solutions of equation (4)



Nonlinear vibrations
In this section, we further investigate the dynamical evolutions with nonlinear vibrations of some solutions obtained above.
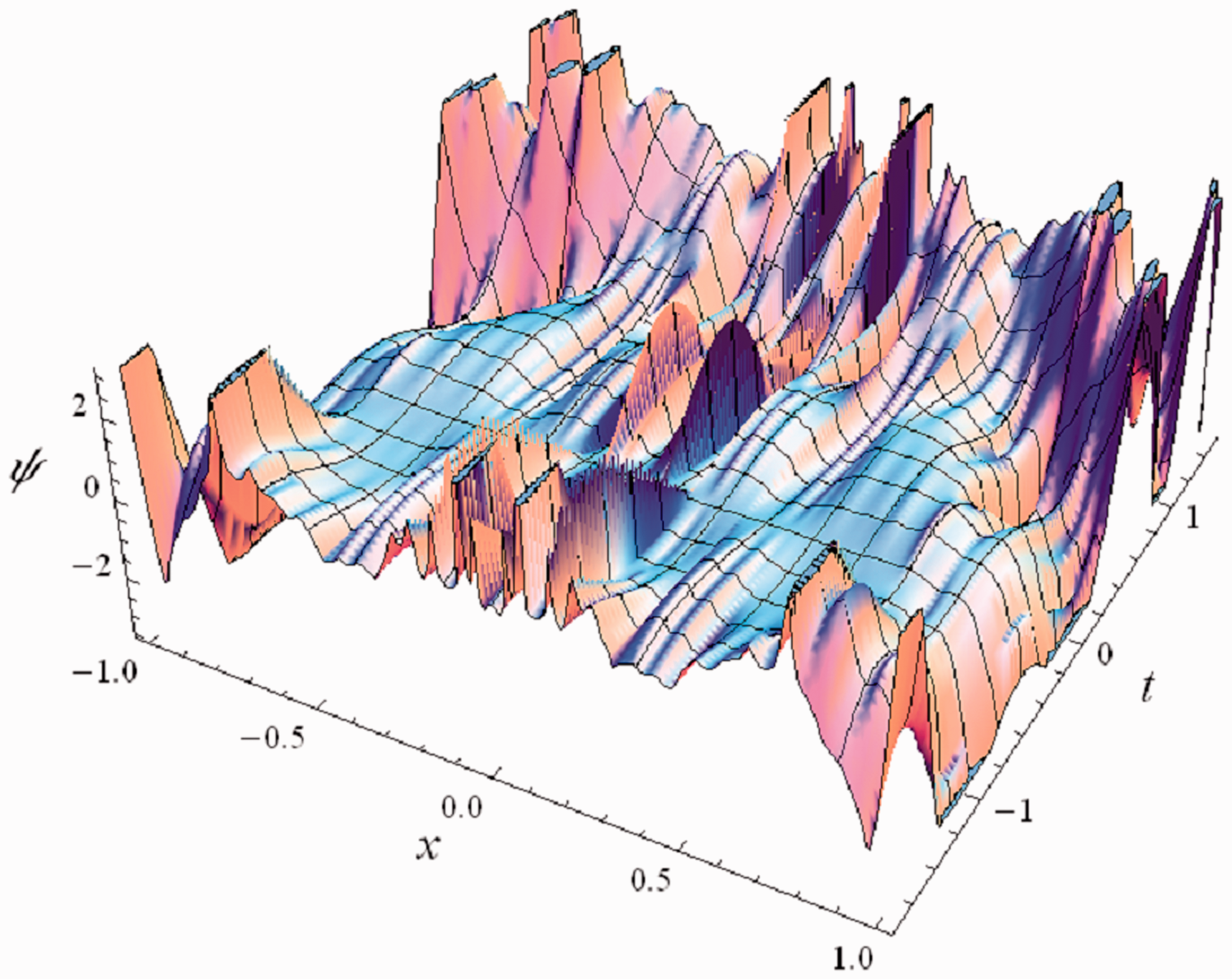
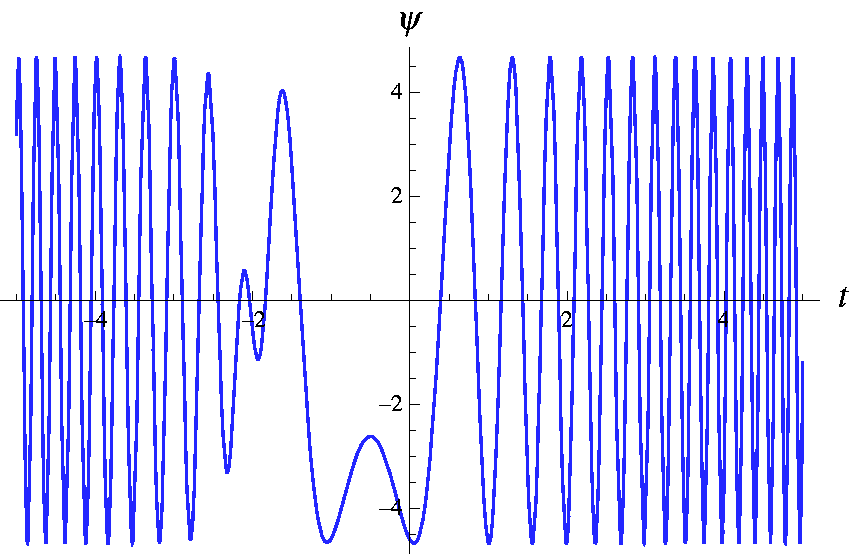
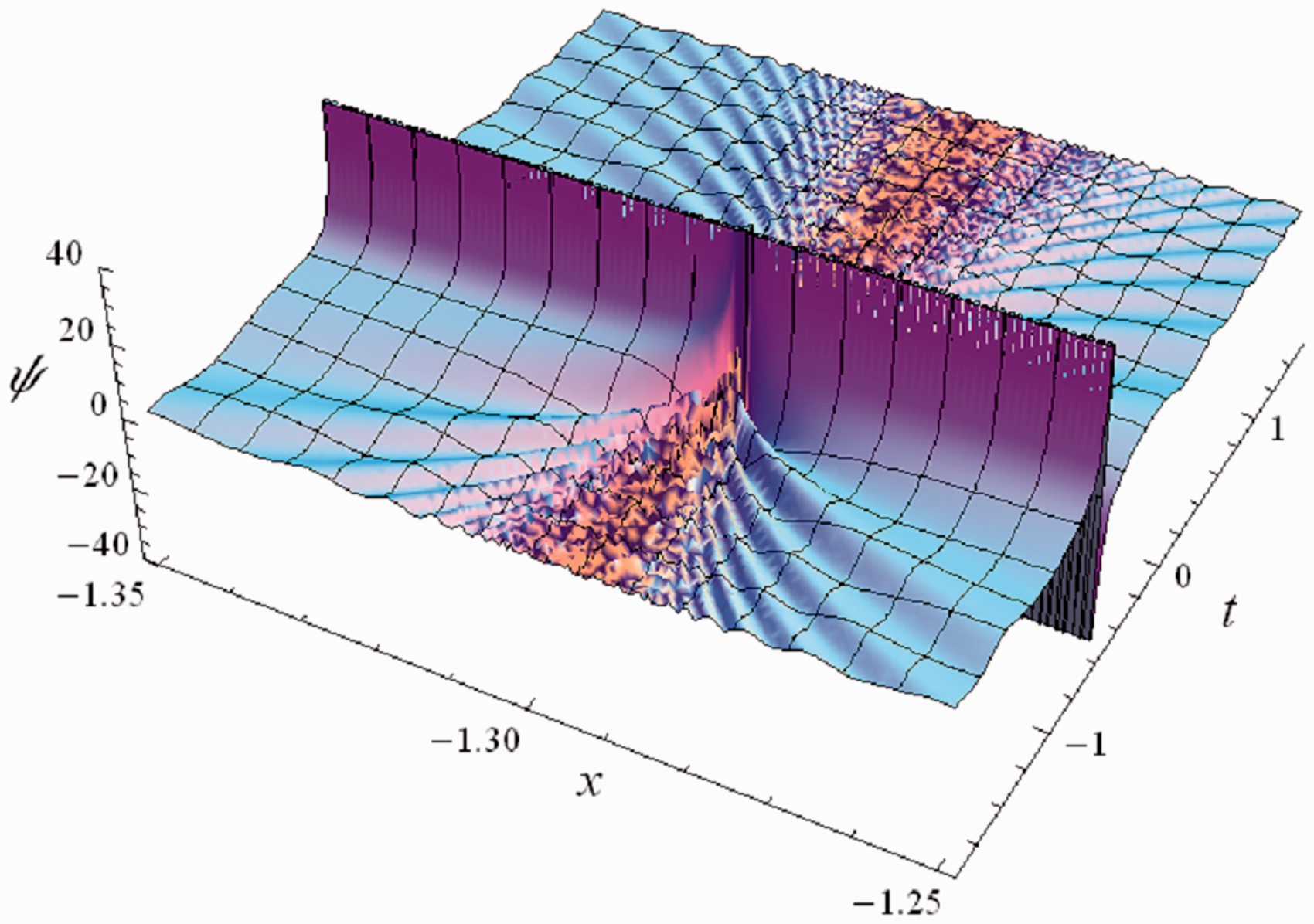
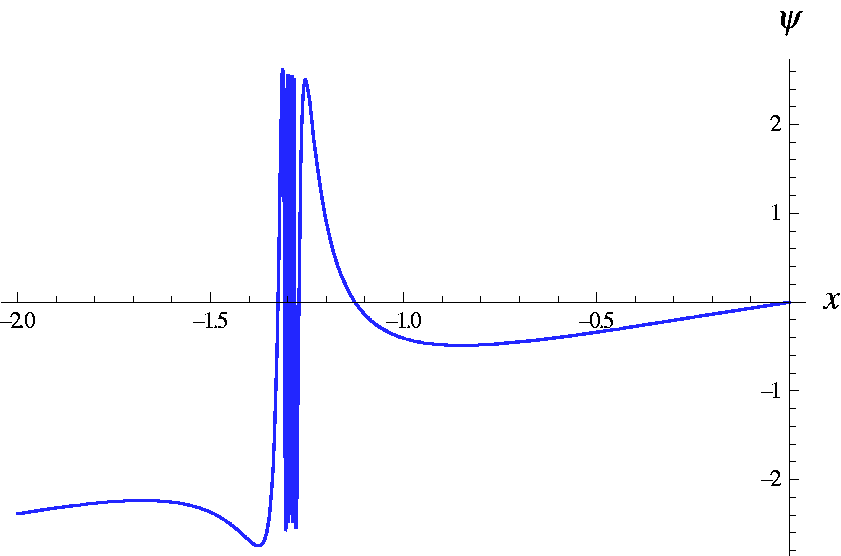
In Figures 1 to 3, we simulate the real part of solution (22) with “+” branch by selecting the hyperbolic tanh function

Spatial structure of the real part of solution (22) determined by hyperbolic tanh function and oscillation functions.
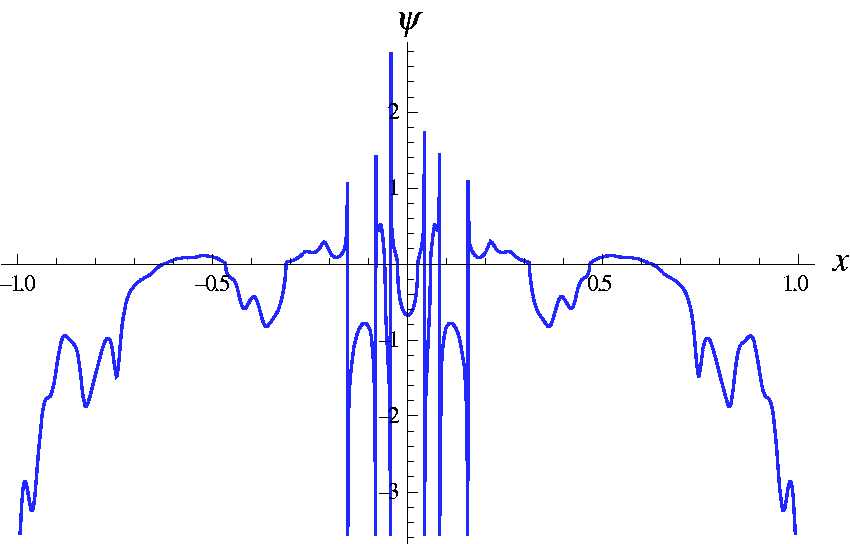
Profile of the real part of solution (22) with nonlinear vibrations exited by hyperbolic tanh function and oscillation functions of at
Nonlinear vibrations excited by hyperbolic tanh function and oscillation functions of the real part of solution (22) at
We can see from Figures 1 to 3 that the amplitude of solution (22) has a great many nonlinear vibrations in the dynamical evolutions. This is due to the selected hyperbolic tanh function and oscillation functions.
If we select the same parameters and hyperbolic tanh function as in Figures 1 to 3, the different functions


Spatial structure of the real part of solution (22) determined by hyperbolic tanh function and noise effects.
Profile of the real part of solution (22) with nonlinear vibrations exited by hyperbolic tanh function and noise effects of at
Nonlinear vibrations excited by hyperbolic tanh function and noise effects of the real part of solution (22) at
In Figures 7 to 9, we simulate the real part of solution (22) with “+” branch by selecting the rational function
Spatial structure of the real part of solution (22) determined by rational function and oscillation functions.
Profile of the real part of solution (22) with nonlinear vibrations exited by rational function and oscillation functions of at
Nonlinear vibrations excited by rational function and oscillation functions of the real part of solution (22) at
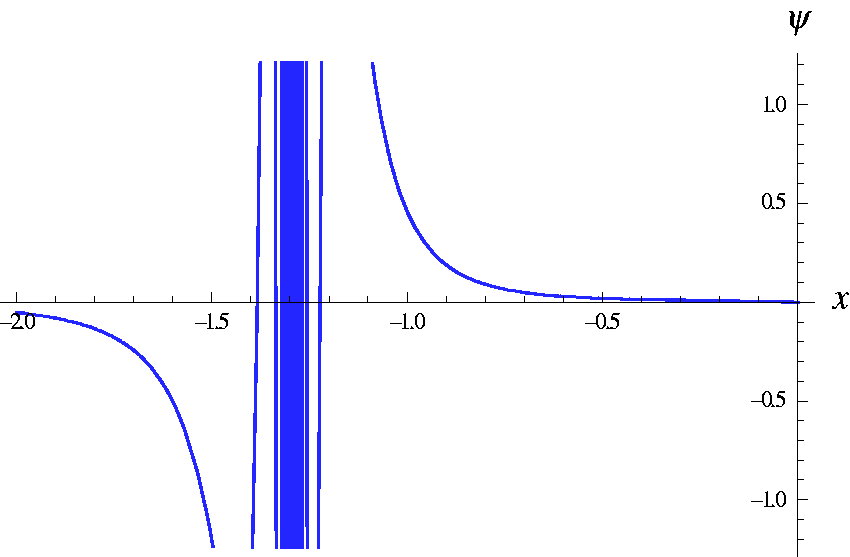
Selecting the rational function
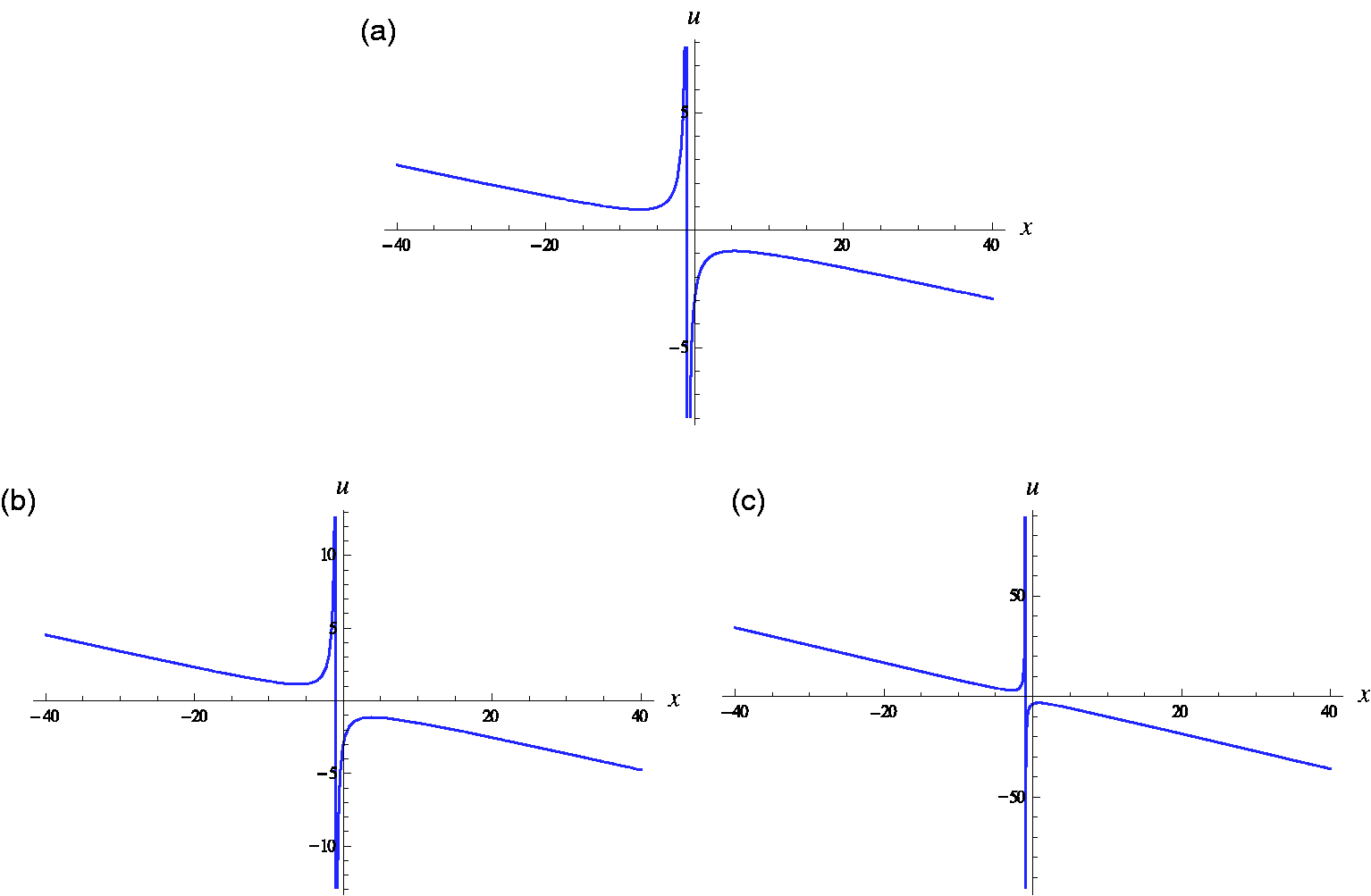
Profiles of solution (33) with nonlinear vibrations exited by rational function at three different times. (a)
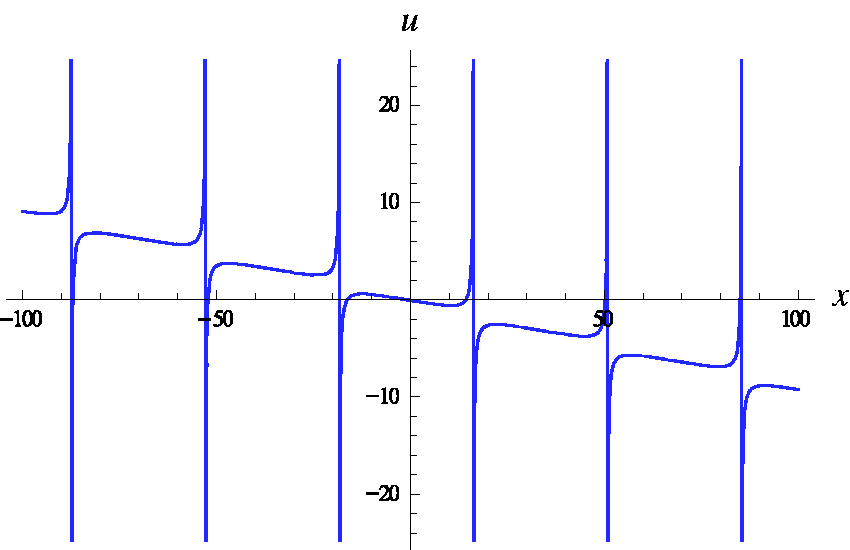
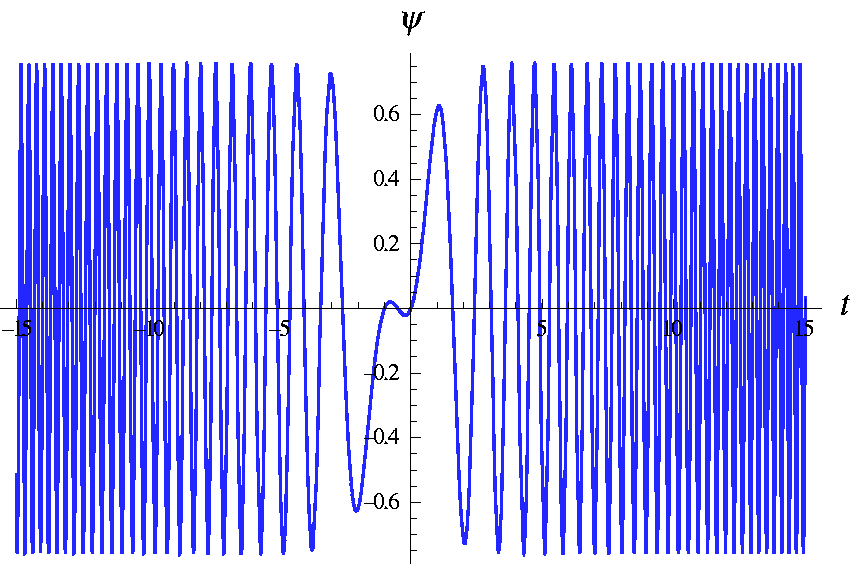
Profile of solution (33) with nonlinear vibrations exited by trigonometric tan function at
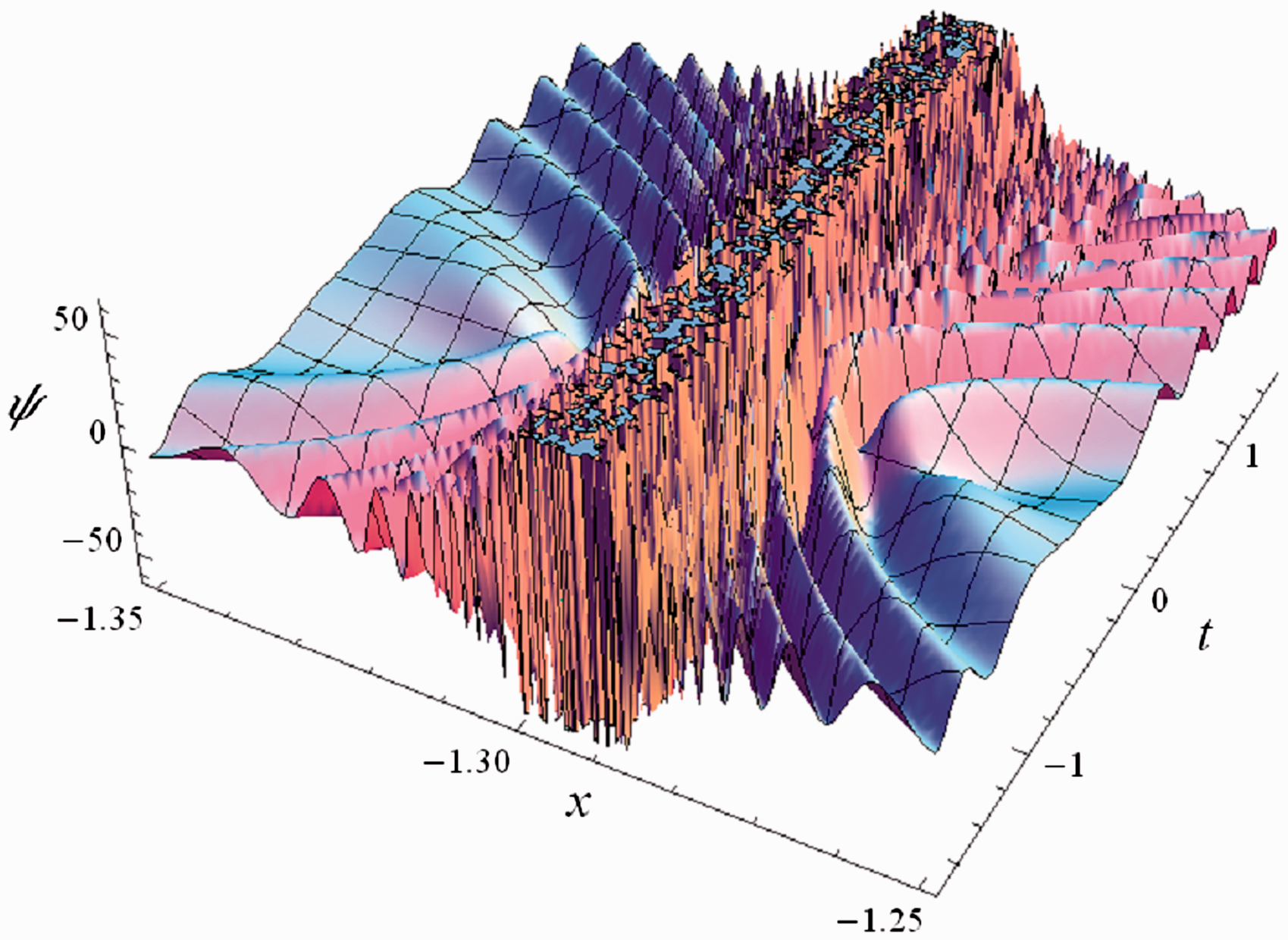
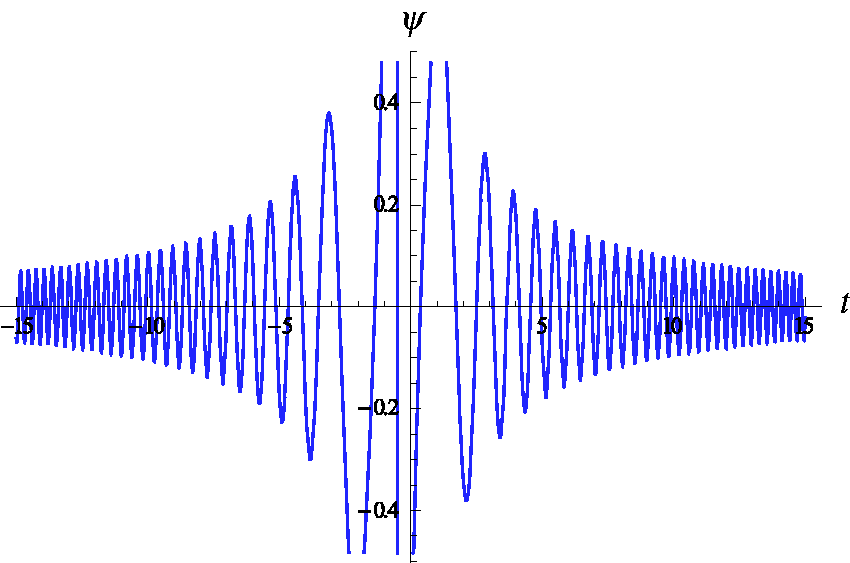
For the hyperbolic function solution (44), we select
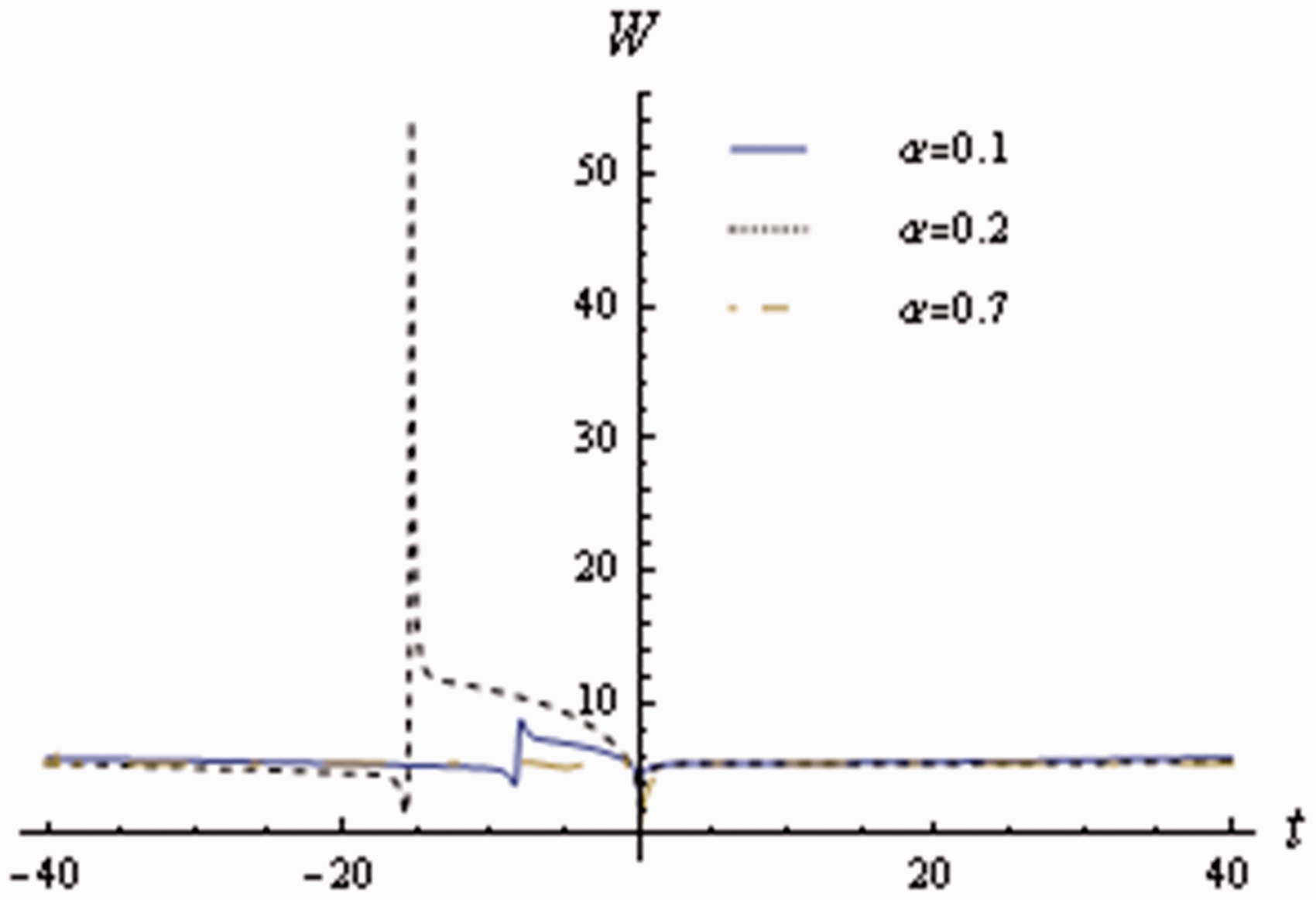
Nonlinear vibrations excited by hyperbolic tanh function of the modulus of solution (44) with different fractional orders.
Conclusion
In summary, with an analytical method we have solved the generalized nonlinear Schrödinger equation with distributed coefficients, the time-dependent-coefficient nonlinear Whitham–Broer–Kaup system and the fractional nonlinear vibration governing equation of an embedded single-wall nanotube and gained some insights into the obtained exact solutions and their nonlinear vibrations happen in process of dynamical evolutions. To the best of our knowledge, the obtained exact solutions (14), (33) to (35) have not been reported in the literatures. It should be noted that when


It is shown from the simulations that the nonlinear vibrations of the amplitudes of the obtained exact solutions in the dynamical evolutions are influenced not only by the coefficient functions as pointed out in Zhang and Hong 28 but also by the oscillation functions, noises and fractional orders. Since the rational ansätz of the exp-function method 7 contain hyperbolic function solutions and trigonometric function solutions, it is possible for us to use the method 7 to construct these solutions obtained in this paper except for the rational solutions. Comparatively speaking, the computation of the exp-function method 7 will become complicated when we construct multiple types of solutions in a uniform way. The higher the requirement of the uniformity is, the more complex will the calculation become. How to extend the existing analytical methods to some other nonlinear vibration equations, especially those differential equations with fractal derivatives, is worthy of study.
Footnotes
Acknowledgements
The authors would like to express their sincerest thanks to Guest Editor Professor Ji-Huan He and the anonymous referees for the valuable suggestions and comments. The third author Sheng Zhang is grateful to Professor Ji-Huan He for his helpful discussions during the 2018 Symposium on Fractal Geometry and Fractional Calculus and their Applications to Thermal Science hold in Soochow University.
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This work was supported by the Natural Science Foundation of China (11547005), the Natural Science Foundation of Liaoning Province of China (20170540007), the Natural Science Foundation of Education Department of Liaoning Province of China (LZ2017002) and Innovative Talents Support Program in Colleges and Universities of Liaoning Province (LR2016021).