
Abstract
Robot-assisted bonnet polishing system (RABPS) is widely used in the polishing of optical components due to its low cost, high efficiency and rapid polishing. However, due to the insufficient stiffness of the robot, it is easy to produce vibration in the machining process, which not only causes the size of the polishing contact area to deviate from the ideal value, but also affects the removal amount of workpiece. First, this paper analyzes the influence of robot system stiffness on the actual polishing area size and polishing removal. Next, based on the analysis of the technical characteristics of multiple groups of polishing posture corresponding to the same point of robot bonnet polishing, the optimization method of robot static stiffness performance is proposed. Finally, the correctness and efficiency of the optimization method are validated by simulation and experiment. The working stiffness of the robot increases by 26.8% and the roughness of the polished surface is improved by 42.9% after posture optimization.
Introduction
The bonnet polishing technology is an emerging polishing technology proposed in 2000. 1 Its principle is to use a hemispherical flexible bonnet with a certain inflation pressure as a polishing tool, which can not only achieve good consistency between the polishing tool and the surface of workpiece, but also control the polishing efficiency and the surface quality of workpiece material by adjusting the technical parameters such as bonnet specification, internal inflation pressure and polishing tool compression. 2 At present, there are many researches on bonnet polishing technology based on CNC machine tools.3–6 However, CNC machine tools have the disadvantages of high cost and low flexibility for industrial applications. Industrial robots can better meet the requirements of low cost and simple control of the bonnet polishing technology.7–9
The bonnet polishing system based on industrial robot has been widely studied. Ji et al. 10 established a robotic polishing system based on bonnet polishing technology, and analyzed the position and posture control problems of bonnet polishing tool. The experimental results show that the polishing efficiency can be improved by accurately controlling the trajectory and posture of the polishing tool through the robot polishing system. Zhong et al. 11 studied the robot assisted bonnet polishing technology for aspheric optical components, and established a control model of the robot assisted bonnet polishing system. Experiments demonstrate that the combination of industrial and bonnet polishing technology can achieve efficient and high-precision manufacturing of aspheric optical components. Huang et al. 12 proposed a robot-assisted bonnet polishing method for SiC optical elements, and studied the bonnet polishing characteristics and the mechanical structure of polishing tool. Experiments show that this method can effectively realize the polishing of SiC optical elements, with high removal function accuracy and strong stability. Huang et al. 13 used the robot-assisted bonnet polishing method to process SiC optical components, and proposed a pseudo-random polishing path based on the traveling salesman problem (TSP) to suppress the spatial intermediate frequency error. It was verified that the robot-assisted bonnet polishing method and the improved TSP polishing path can effectively realize the polishing of SiC optical elements through rough polishing and fine polishing.
It can be seen from the above literature that the combination of robot as carrier and bonnet polishing technology can effectively improve the processing efficiency of optical components and reduce the cost. However, Slavkovic et al. 14 explained that compared with CNC machine tools, the stiffness of the robot is seriously insufficient, resulting in vibration during the machining process, which affects the machining accuracy and surface quality. Therefore, improving the working stiffness of the robot is of great significance to expand the application field of industrial robot and reduce the actual processing cost. 15
In order to solve the common problem of robot stiffness insufficient, researchers have carried out research. Studies have shown that the stiffness of the robot is directly related to the robot posture, and the robot stiffness of the robot can be improved by optimizing the robot posture. 16 Zargarbashi et al. 17 proposed a robot performance index to evaluate the effectiveness of actuator torque and joint velocity in generating a specified robot posture during processing. Based on this index, the posture of the six-rotary robot when performing the five-axis machining task is optimized. Bu 18 took the automatic drilling system of industrial robots as the research object, proposed a characterization model of directional stiffness guided by the drilling task, and explored the relationship between drilling quality and robot machining posture, and then proposed a robot posture comprehensive optimization method based on stiffness and kinematic performance. Chen 19 aimed at the optimal robot stiffness performance, combined with the posture constraints of the robot drilling and riveting system, established the posture optimization mathematical model based on the stiffness performance of the robot, and proved through a specific example that the stiffness performance of the robot can be improved by optimizing the robot posture.
The above literature introduces that when industrial robots are applied in various processing systems, the working stiffness of the robot can be improved by adjusting the posture. However, the research on the posture optimization method of robot assisted bonnet polishing system is relatively scarce. Therefore, in order to improve the working stiffness of the robot and ensure the machining accuracy, this paper studies the influence of robot stiffness on the polishing effect during bonnet polishing. Subsequently, the stiffness optimization method is proposed in combination with the characteristics of RABPS.
Firstly, in Section 2, the effect of the terminal deformation caused by the stiffness of RABPS on the polishing effect is analyzed. Then, in Section 3, the posture of the robot is optimized according to the characteristics of the precession angle in bonnet polishing, and then the static stiffness of the robot is optimized, and the stiffness index before and after the optimization are compared. Subsequently, in Section 4, the static stiffness optimization method is verified by experiments and the experimental results are analyzed. At last, the conclusion is drawn in Section 5.
Analysis of the influence of static stiffness of RABPS on polishing effect
In order to illustrate the necessity of optimizing the stiffness of the robot, it is necessary to first analyze the effect of RABPS on the polishing effect. According to Hooke’s law, the terminal deformation

where
It is easy to know from equation (1) that the linear displacement deformation caused by the force on the end of the robot will affect the position error
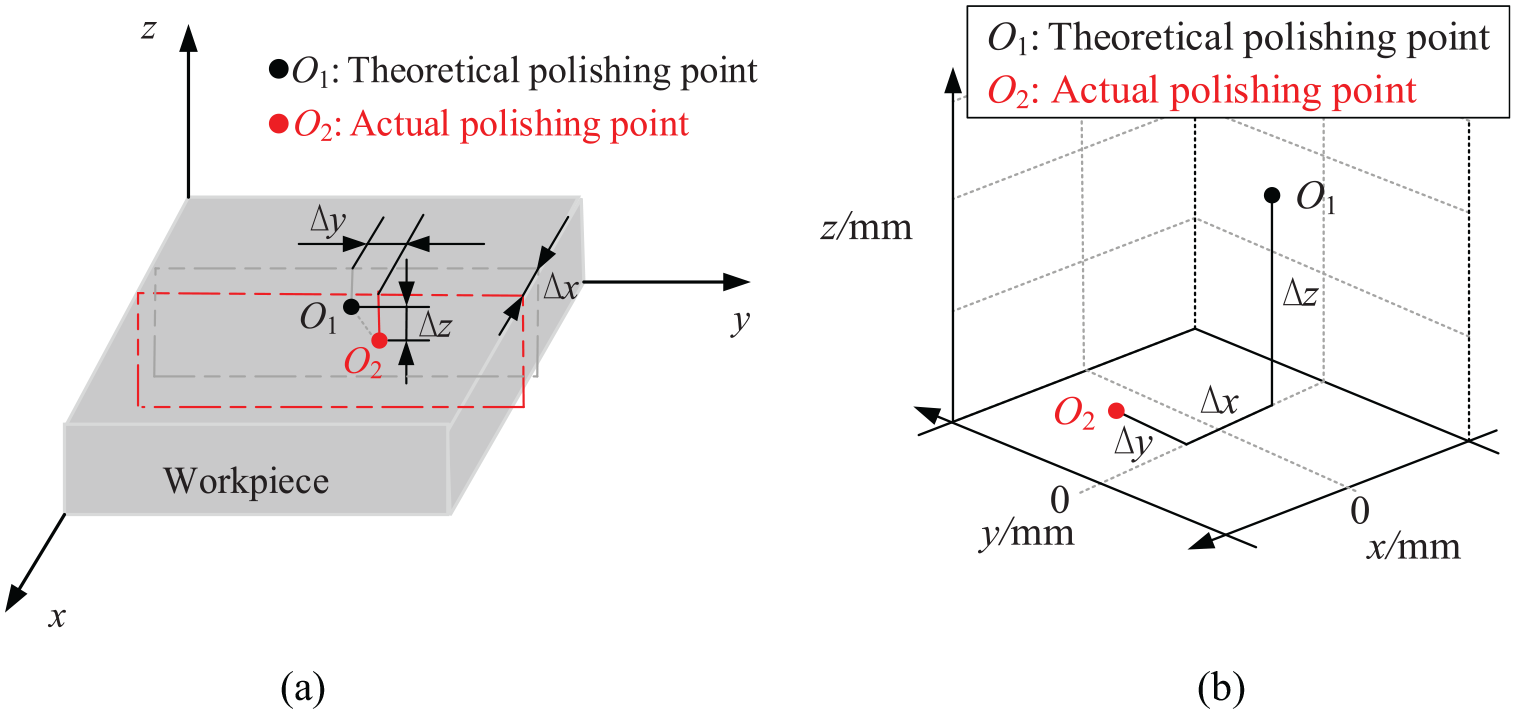
Position error of bonnet polishing point: (a) workpiece and (b) three-dimensional space.
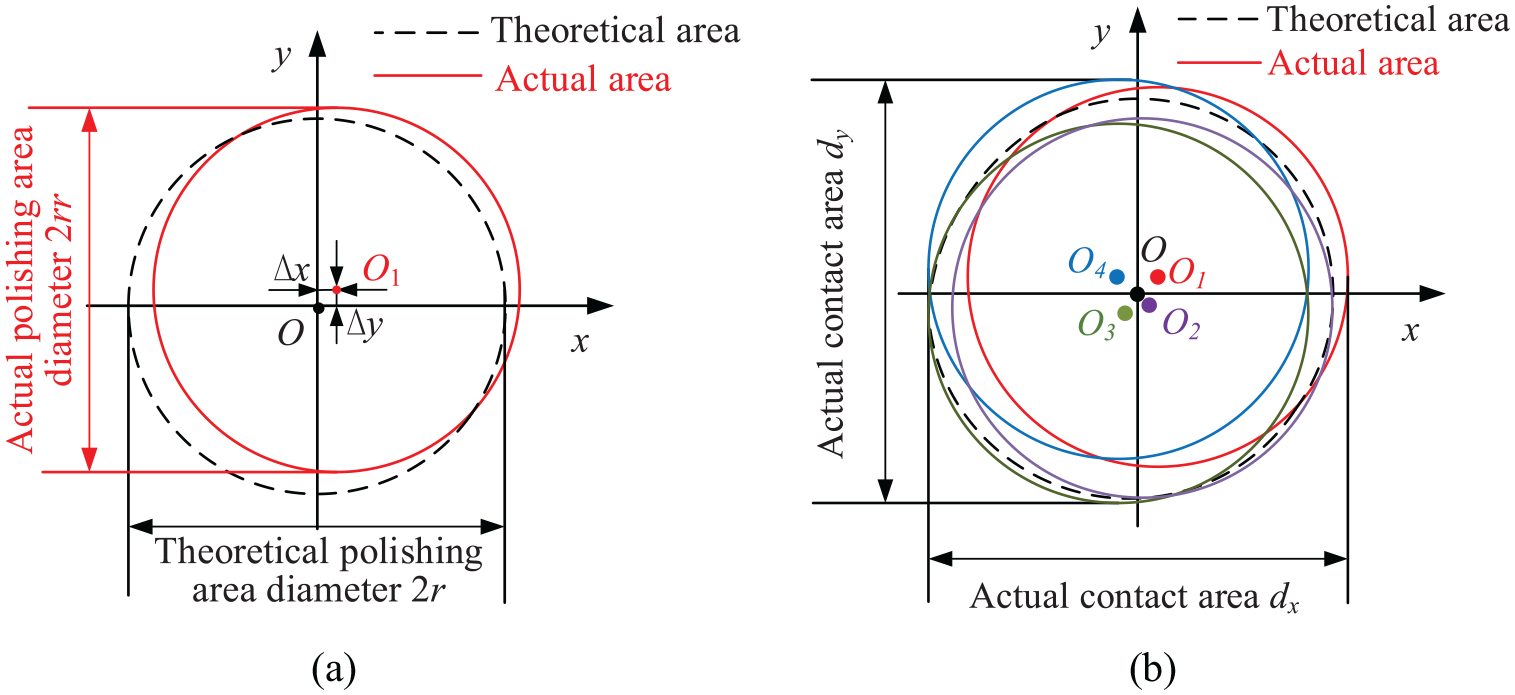
Influence of robot end deformation on polishing area: (a) single step polishing and (b) four step discrete polishing.
Furthermore, the normal position error

where R is the bonnet radius, h is the bonnet compression.
However, when the linear displacement deformation generated at the end of the robot is considered, the contact zone radius shown in Figure 3 becomes:

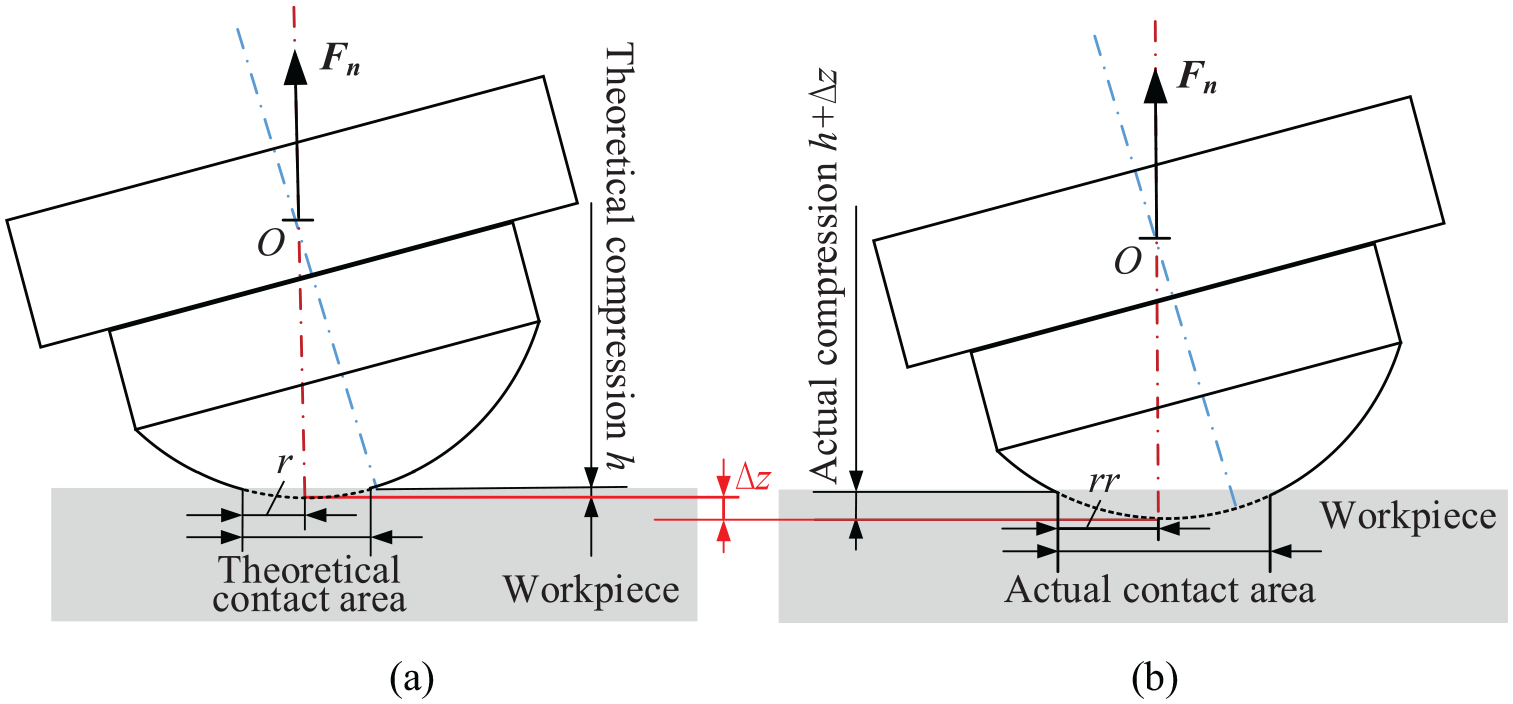
Change of the bonnet polishing spot of robot: (a) theoretical polishing contact area size and (b) actual polishing contact area size.
When four-step discrete polishing is applied to the robot shown in Figure 2(b), it is assumed that the theoretical polishing spot radius of the multi-step robot in a certain posture is rrm (m = 1,2,3,4), the size of the actual contact area in Figure 2(b) can be obtained through equation (3).

It can be seen from equations (3) and (4) that when the robot has a large deformation under four discrete working postures, there will be a large gap between dx and dy in equation (4), the contact area of bonnet polishing in Figure 2(b) will no longer show a regular circle.
When the four-step discrete postures of the robot shown in Table 1 is substituted into equations (1)–(4), the actual polishing contact point position and contact area can be obtained, which is as shown in Figure 4.
Robot postures of four-step tilted polishing.

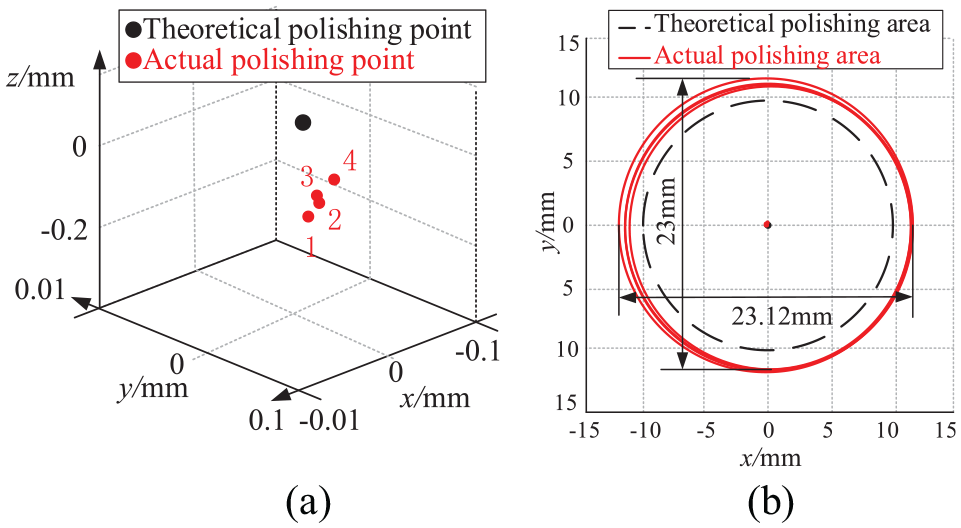
Influence of robot stiffness on four-step tilted polishing: (a) spatial error of polishing contact point and (b) polishing contact area size.
It can be seen from Figure 4 that due to the deformation of the robot terminal caused by the stiffness of RABPS, the position of the polishing contact point will not only be changed, but also the actual contact area radius under each discrete single step is about 17% larger than the ideal value, The maximum size difference of polishing contact area along x-axis and y-axis under the comprehensive action of four-steps discrete polishing is about 0.5%, which has a certain degree of error with the ideal value.
However, the stiffness of RABPS will not only affect the shape and size of the contact area, but also affect the polishing removal amount, which is mainly reflected by affecting the velocity and pressure distribution in the polishing area. According to Preston’s law,20,21 the maximum removal amount of bonnet polishing within the polishing time t is expressed as:

where k is the constant of Preston law, Pmax is the maximum pressure in the polishing contact area, vm is the velocity corresponding to the maximum pressure in the polishing contact area.
According to Pan et al., 22 the velocity vm in equation (5) can be expressed as the following:

where
When equations (5) and (6) are combined, and the deformation of the end of RABPS

Based on the above analysis, it can be seen that the stiffness of RABPS will not only affect the shape and size of the polishing contact area, but also affect the actual polishing removal effect. Therefore, it is of great significance to optimize the stiffness of RABPS to improve the positioning accuracy of robot polishing and the removal effect of polishing.
Static stiffness optimization of robot airbag polishing system
According to previous studies, 23 the static stiffness of RABPS is largely dependent on posture, which makes it an effective way to optimize the working stiffness of RABPS by optimizing the robot postures.
Optimization method for static stiffness of RABPS
For planar optical elements, the normal lines of all polishing points are consistently vertical and upward during bonnet polishing. According to the technical principle of bonnet polishing, there is always a precession angle
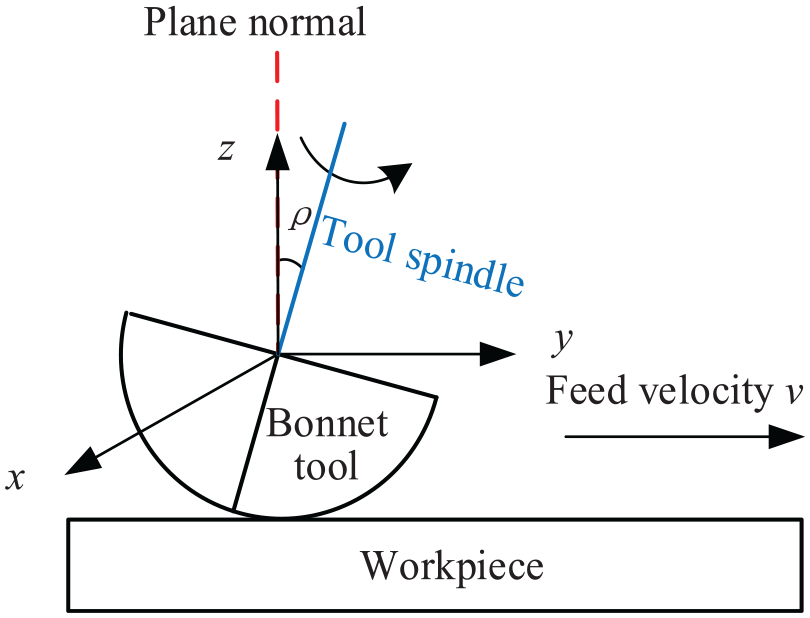
Continuous precession polishing of planar optical elements with bonnet.
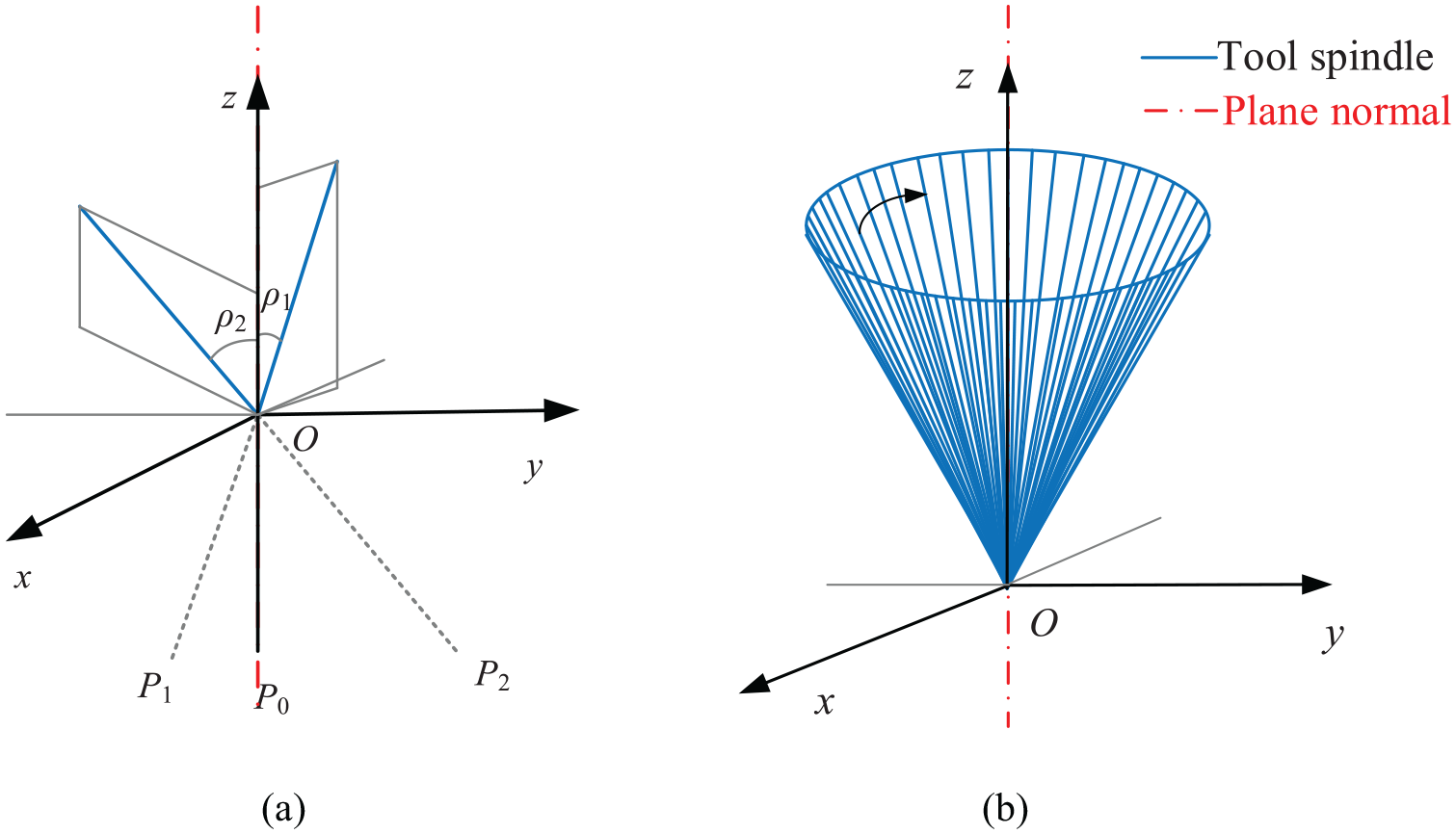
The spatial relationship between the principal axis of bonnet and the plane normal: (a) precession polishing with bonnet and (b) fixed point polishing with bonnet.
In Figure 6(b), the countless tool spindle surrounding the plane normal correspond to countless robot postures, and each posture can meet the current positioning requirements. Therefore, when bonnet polishing is performed on the same polishing point, there will be countless robot postures, and there must be an optimal posture among all feasible postures, which makes the static working stiffness performance of RABPS optimal.
In order to explore the posture with the best static performance among the many postures when polishing a target point, it is necessary to first describe the posture of the current polishing point. The posture diagram of the robot in the fixed-point polishing state is shown in Figure 7. The current polishing point is composed of a position vector
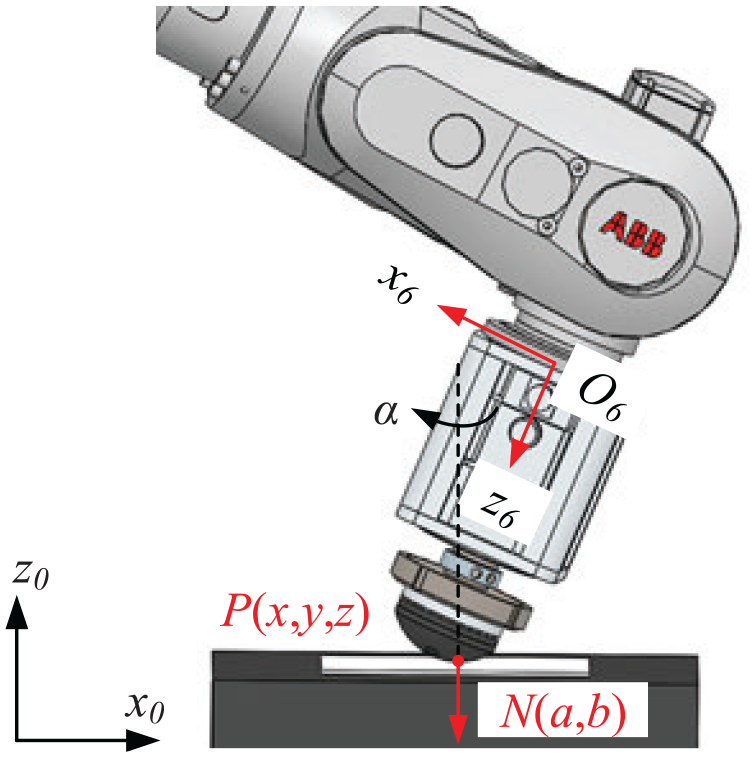
Physical model of fixed-point bonnet polishing.
In order to distinguish the postures of these robots, the angle
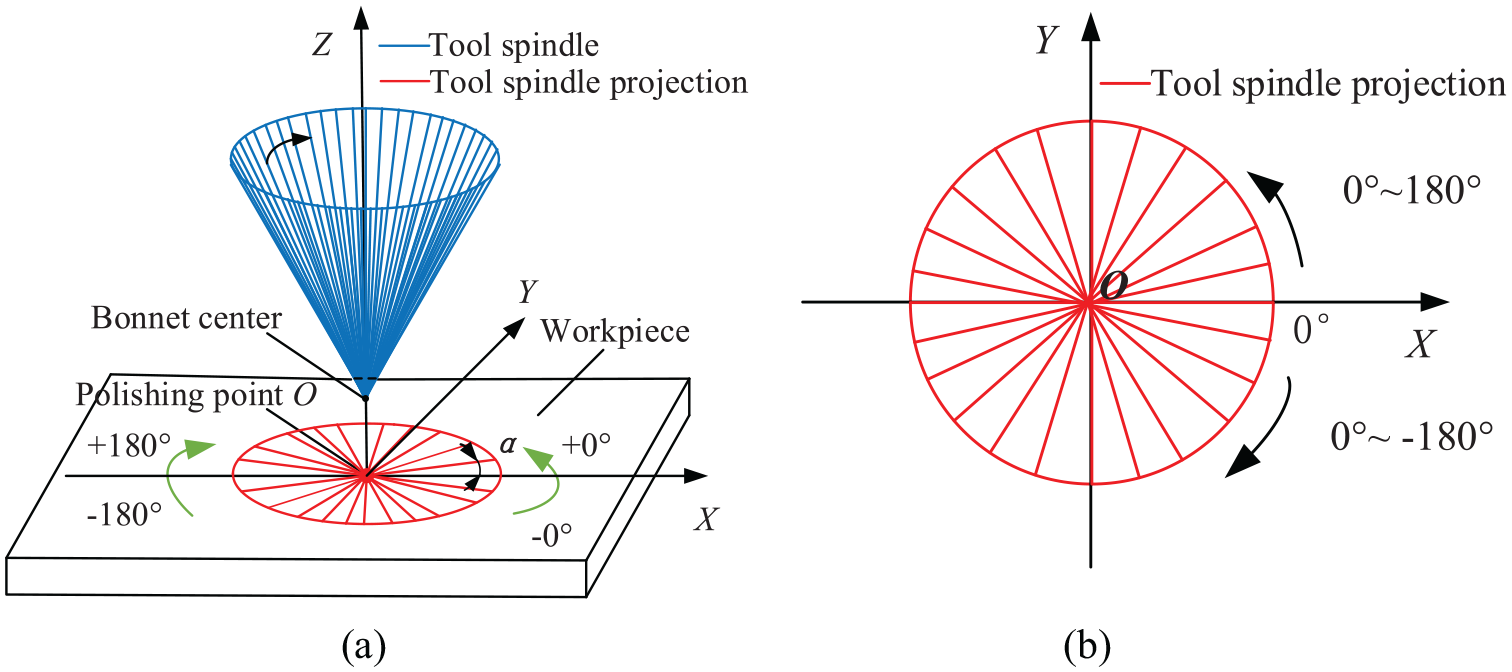
Schematic figure of robot posture adjustment: (a) schematic figure of robot posture angle and (b) plane view of workpiece.
Taking the original posture of the robot as the starting point and changing the posture position angle α, there will be countless robot postures, and one of them must make the robot’s working stiffness optimal. In our previous research, 23 the robot’s normal stiffness coefficient kz was selected as the index to evaluate the robot’s working stiffness. Therefore, in this paper, the maximum of kz is taken as the optimization objective, the posture position angle α is taken as the optimization variable, and the position and direction requirements of polishing points and the range of robot joint angles are taken as constraints, the static performance optimization model of the robot can be established as shown in equation (8), and the solution is carried out according to the process in Figure 9.

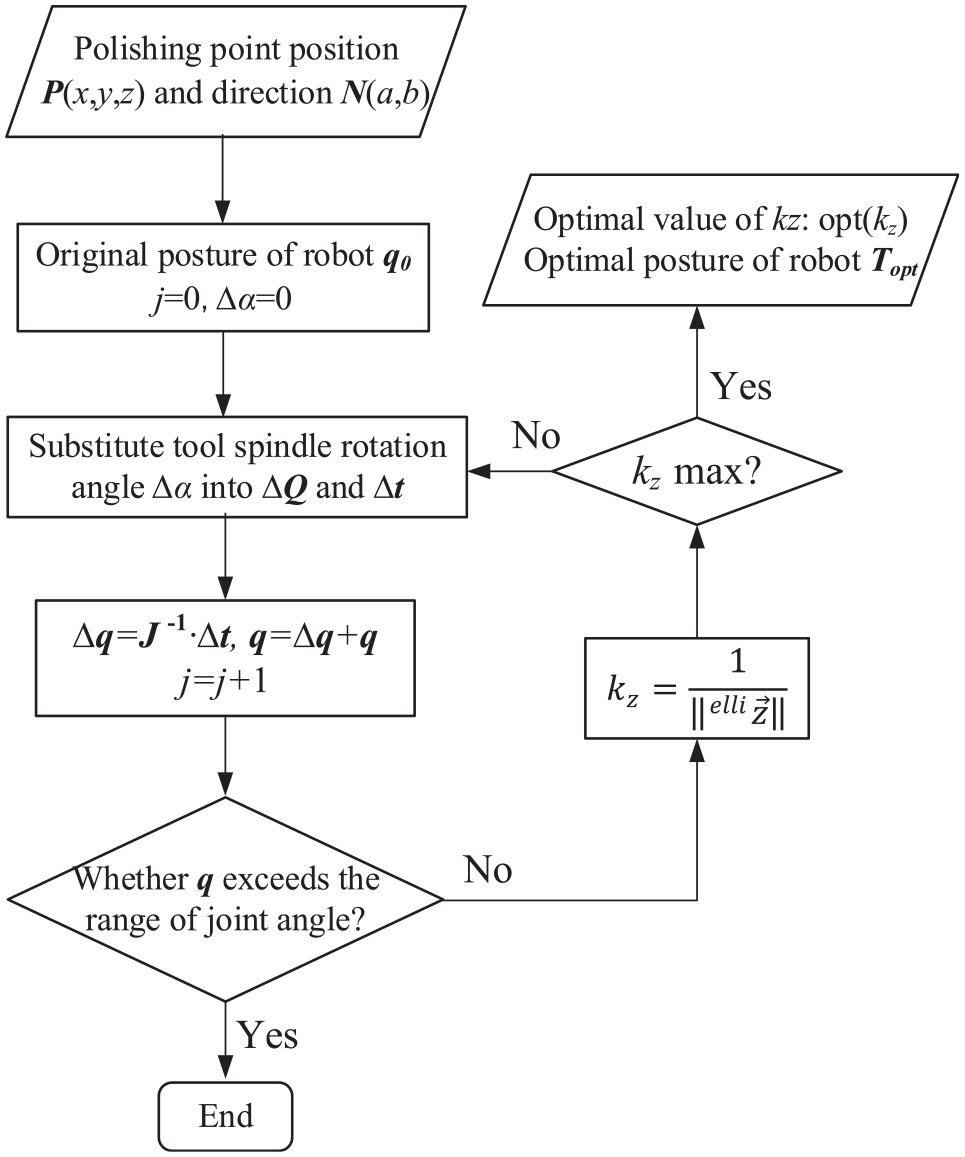
Process of robot posture optimization.
where
In Figure 9, the variation of rotation matrix

where
where

where

where

where

Therefore the static stiffness optimization model of RABPS has been established. The optimization method needs to be verified by simulation and experiment further.
Optimization results of static stiffness of RABPS
Through the above optimization model, the posture with the best static working stiffness of RABPS can be obtained according to the posture information of polishing points.
Taking the original posture as an example, the variation curve of the robot’s working stiffness with posture position angle is drawn according to the optimization method, which is as shown in Figure 10.
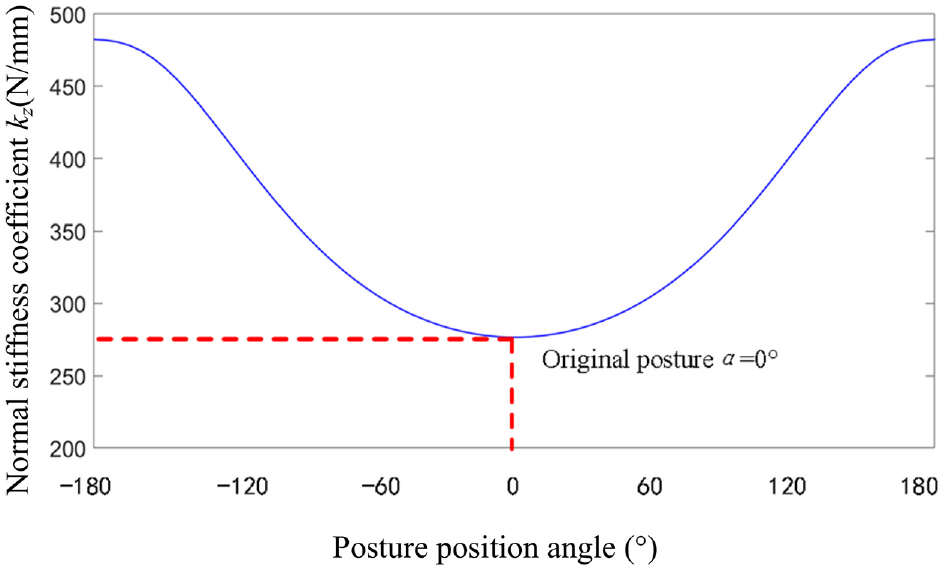
Working stiffness curve of the robot.
It can be seen from Figure 10 that the normal stiffness coefficient of the robot kz is the smallest in the work stiffness change curve when it is in the original posture (posture position angle
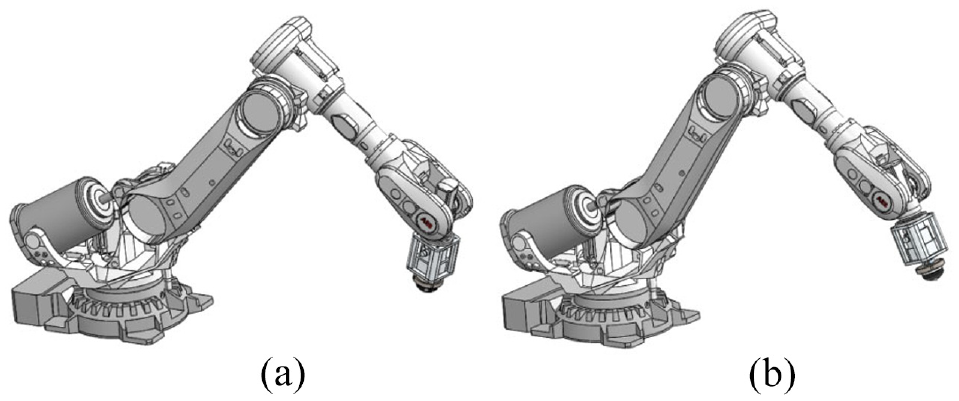
Robot posture optimization result: (a) original posture and (b) optimized posture.
When optimizing the static working stiffness performance of continuous precession polishing shown in Figure 5, it is necessary to plan the polishing path according to the surface information of the workpiece to obtain the discrete polishing point information, and then the posture of each discrete point can be optimized.
Select discrete polishing points on a grating path on the workpiece (Figure 12(a)) and on a straight path (Figure 12(b)) as the optimization object, the robot posture that corresponding to these discrete polishing points is optimized by using the method proposed in Section 3.1, and the corresponding changing curve of robot working stiffness can be obtained, which is as shown in Figure 13.
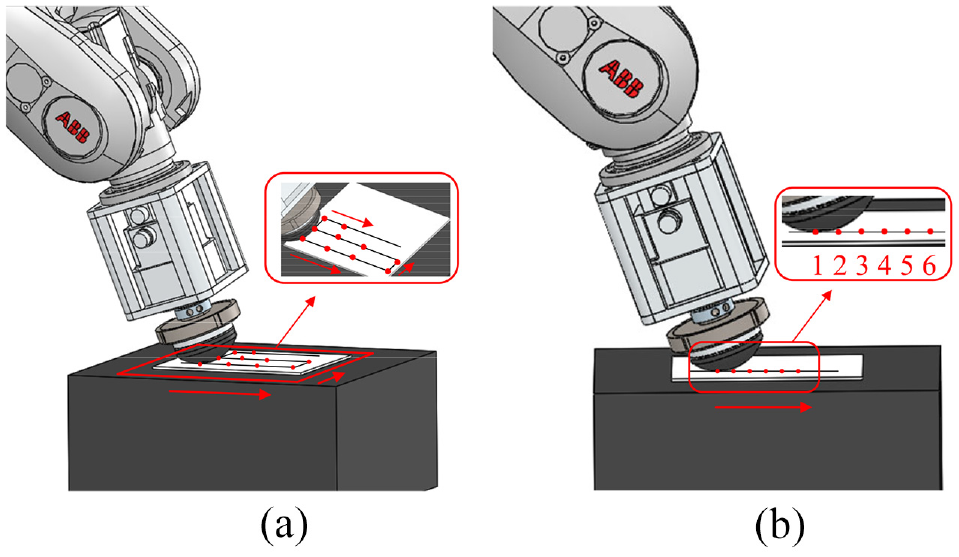
Polishing points of robot along different paths:(a) grating path and (b) straight path.
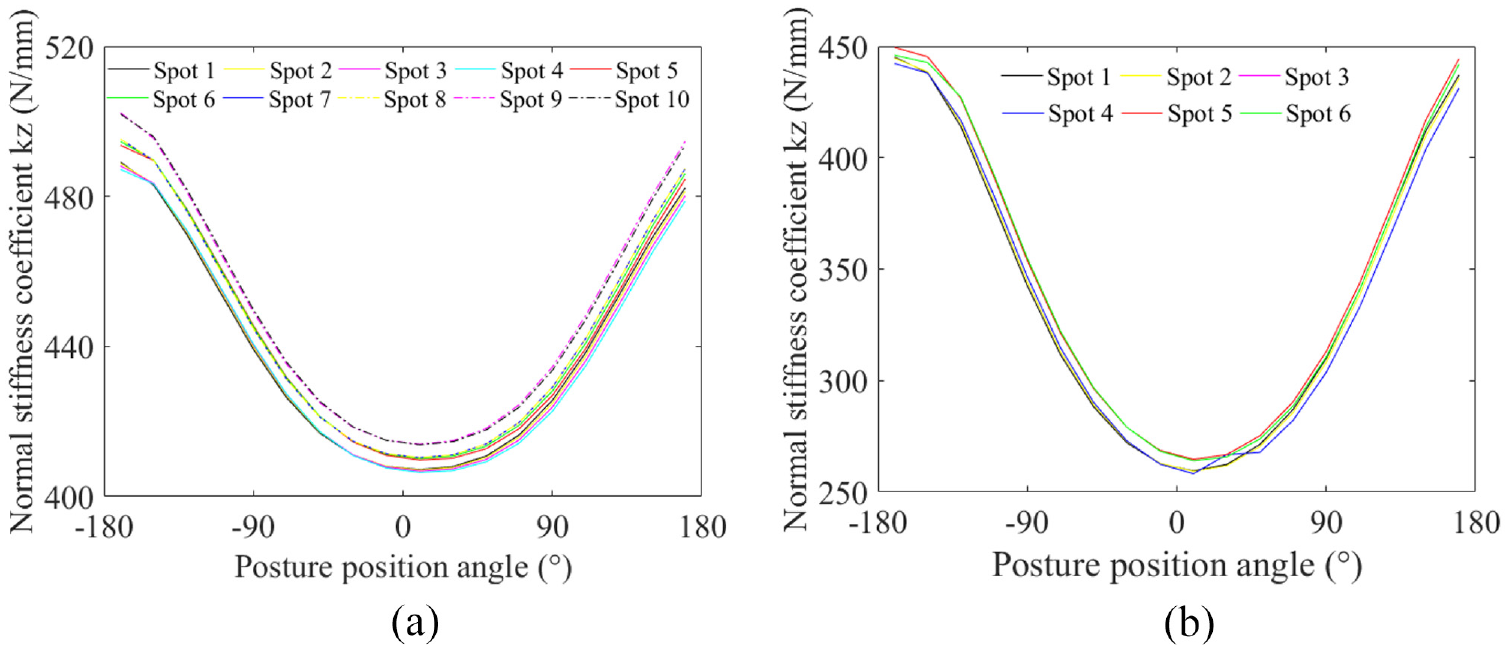
Working stiffness curve of robot polishing points along different paths: (a) grating path and (b) straight path.
Since the direction vector of the polishing point on the workpiece is in the vertical direction for planar optical elements, the normal stiffness coefficient corresponding to the polishing point on the path of Figure 13(a) and (b) shows the same change trend. According to the optimization method in Section 3.1, the optimal robot posture of 6 polishing points in Figure 12(b) straight path can be obtained. The results are shown in Table 2.
Robot posture optimization results.
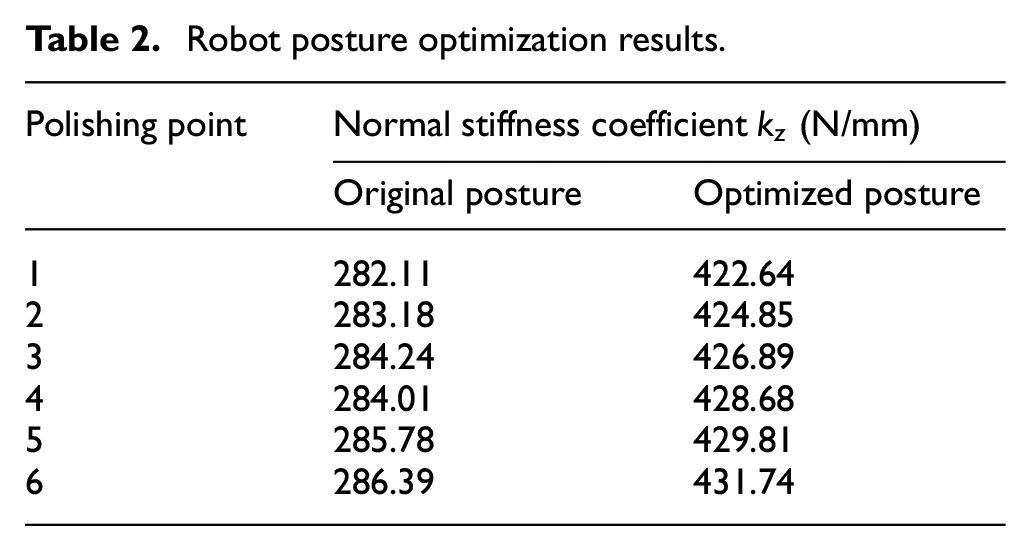
From the data in Table 2, it can be seen that the working stiffness of the robot corresponding to the 6 polishing points has been improved after the posture optimization, and the average increase range has reached 50%.
The radius of polishing contact area before and after robot posture optimization can be obtained by substituting the robot postures before and after optimization into equations (2) and (3), which is shown in Figure 14(a). Meanwhile, the maximum theoretical removal amount before and after posture optimization can be obtained by substituting the robot joint angle into equation (7), as shown in Figure 14(b). The process parameters involved are selected according to the literature, 26 and the specific values are shown in Table 3.
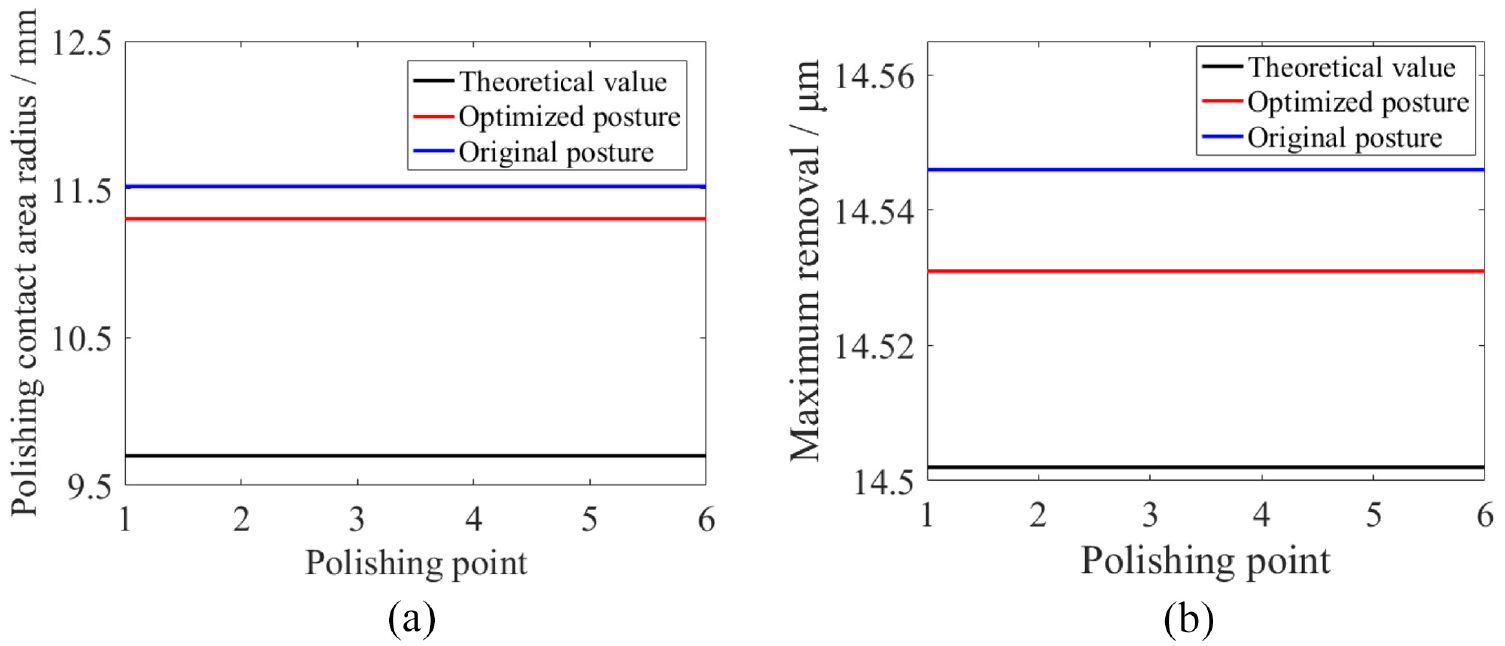
Effect of robot posture optimization: (a) radius of polishing spot and (b) maximum removal.
Parameter selection of bonnet polishing.

It can be seen from Figure 14 that the size of polishing contact area and maximum removal amount of the robot under the optimized posture are closer to the theoretical value than those under the original posture, indicating that the posture optimization method proposed in this paper has effectively improved the working stiffness of RABPS. Moreover, the error between the contact area size and the removal amount under the optimized posture and the theoretical value is reduced. It can be seen that the robot’s posture optimization also has a certain effect on improving the removal effect.
Experiment and discussion
In order to verify the correctness of the posture optimization method of the robot assisted bonnet polishing process based on the work stiffness evaluation in this paper, the static pressure force measurement test and uniform plane polishing experiment of the robot assisted bonnet polishing were carried out respectively in this section.
Static pressure force measurement test
Since the working stiffness of the robot cannot be measured directly in the actual bonnet polishing, the normal force acting on the tool during bonnet polishing is used to reflect the working stiffness. According to our previous research, 23 the experiment can be carried out in the following steps.
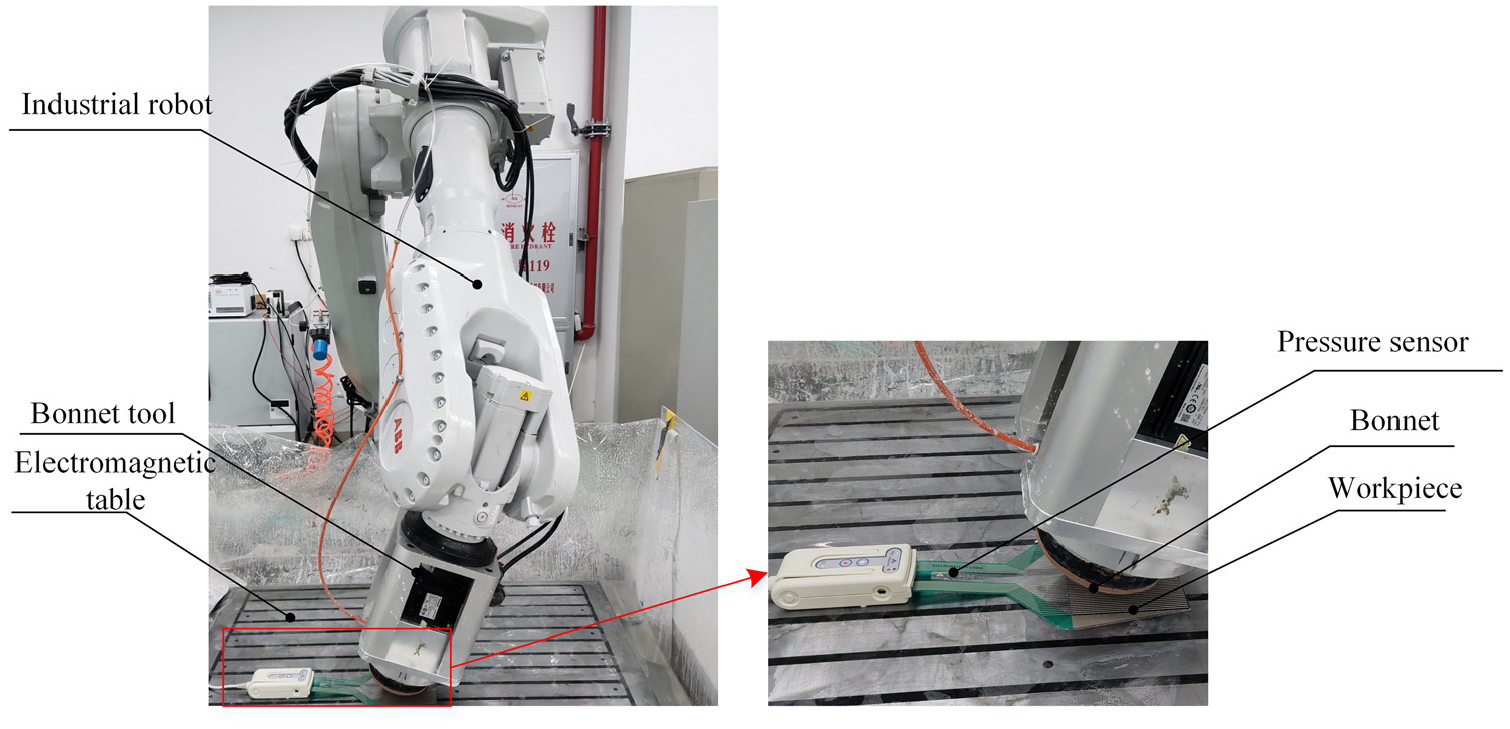
The static pressure sensor (model I-Scan, made by Tekscan) as shown in Figure 15 is used to collect polishing spots. Since the theoretical polishing spot radius is only related to the bonnet radius and compression, when the polishing spot kept constant, the terminal deformation of the robot also kept constant. It is easy to show from equation (1) that the greater the measured normal force, the better the stiffness performance of the robot. Consequently, the working stiffness of the robot can be characterized by the measured normal force. The experimental equipment is shown in Figure 16.
The thin film pressure sensor was used to keep the polishing contact area at 265 mm2 in the experiment. Other experimental parameters are shown in Table 4.
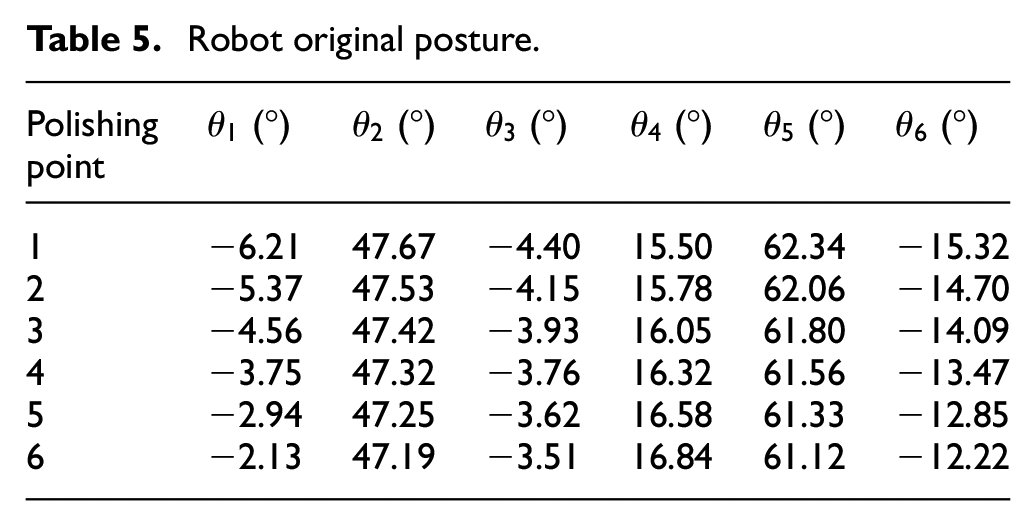
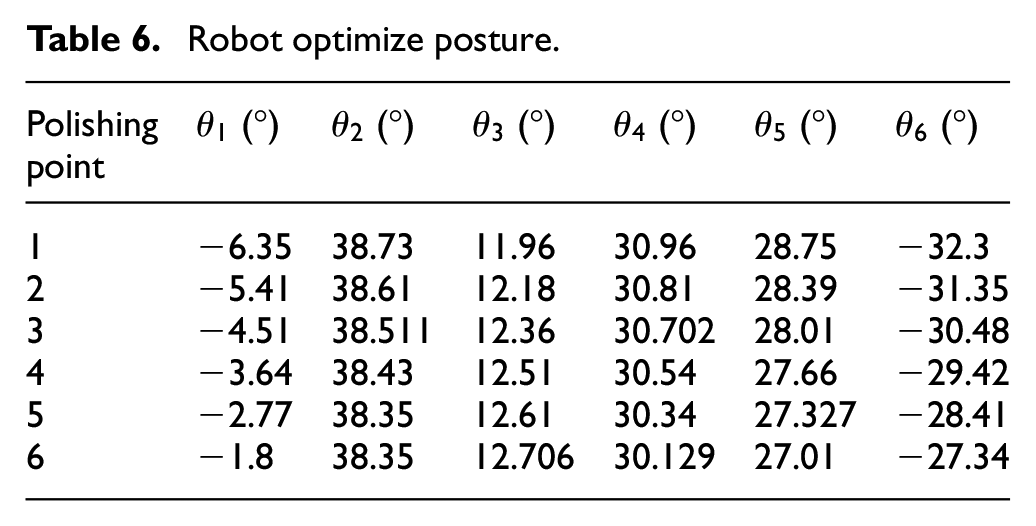
Static pressure force measurement experiments are carried out on the 6 polishing points of the straight path shown in Figure 12(b), in which the posture adopted by the robot is the original posture and the optimized posture. The specific joint angle values are shown in Tables 5 and 6 respectively. In the experiment, the pressure force value displayed by the static pressure sensor is used as the basis for comparing the working stiffness in different postures. The measured normal force value is shown in Table 7.
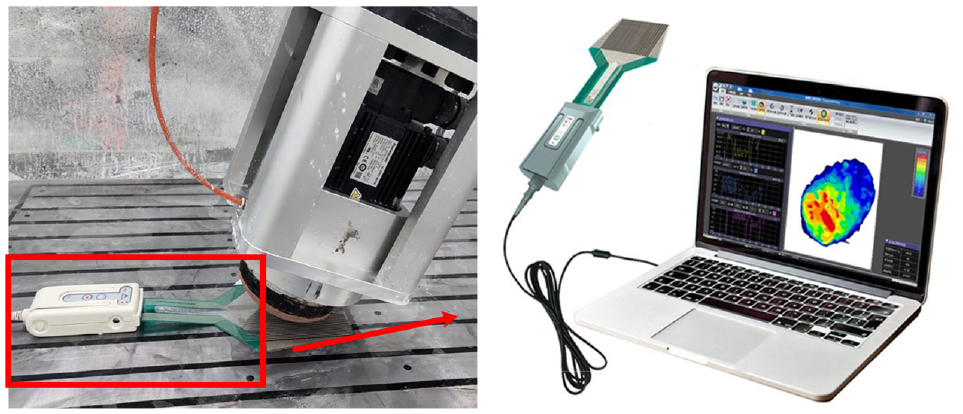
The collection principle of the polishing spot.
The collection principle of the normal force.
Parameters of the experiment.

Robot original posture.
Robot optimize posture.
Force measurement results of posture optimization experiment.
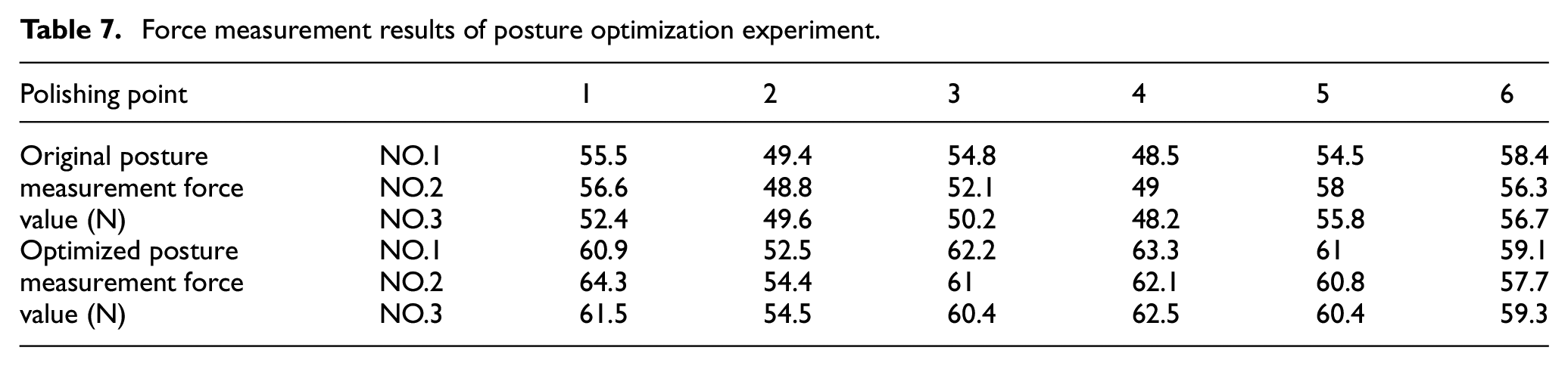
It can be seen from the data in Table 7, for the robot posture of the same path and the same polishing point, the measured force value after the optimization is improved compared with that under the original, that is, the working stiffness of the robot after posture optimization is improved. The measured force values of the three experiments under the two groups of postures in the Table 7 were averaged and compared, as shown in Figure 17.
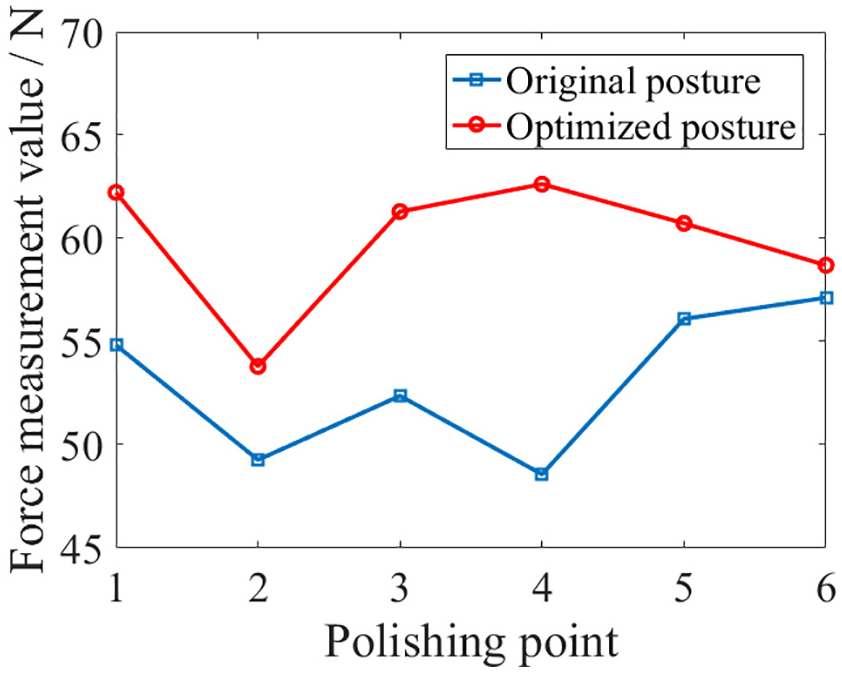
Comparison of the mean values of the force measurement results of the two groups.
It can be seen from the results in Figure 17 that the static pressure force measurement values of the robot in the optimized posture under the same path are greater than the original posture, in which the normal force of the optimized posture of the 6 polishing points is increased by 13.1% on average compared with the original posture, and the best optimization effect reaches 26.8%. Which indicating that the working stiffness of RABPS is improved after optimization.
Plane uniform polishing experiment
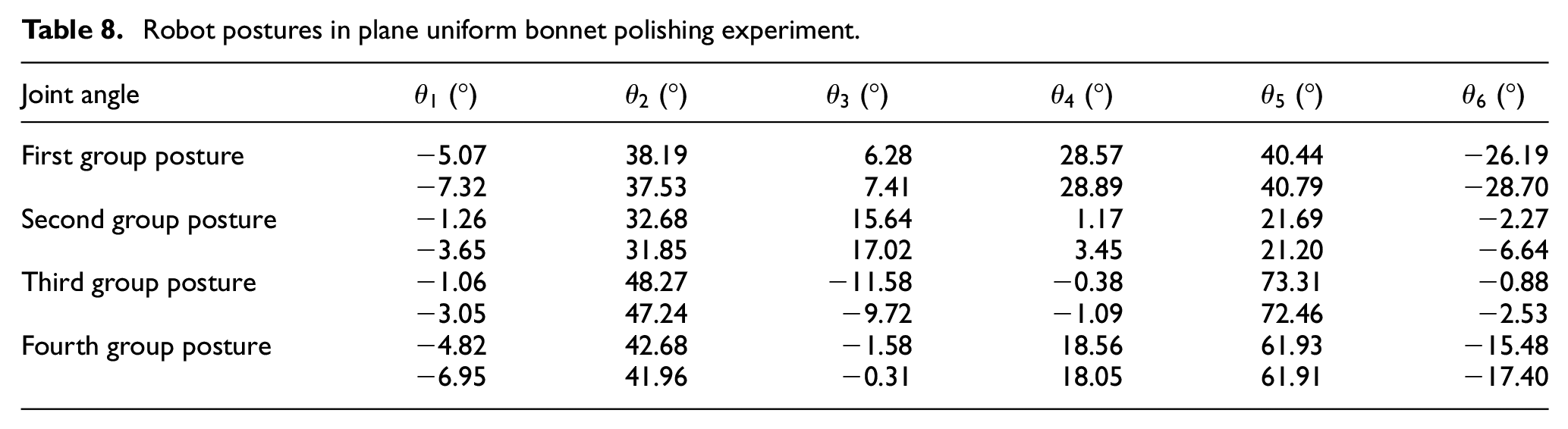
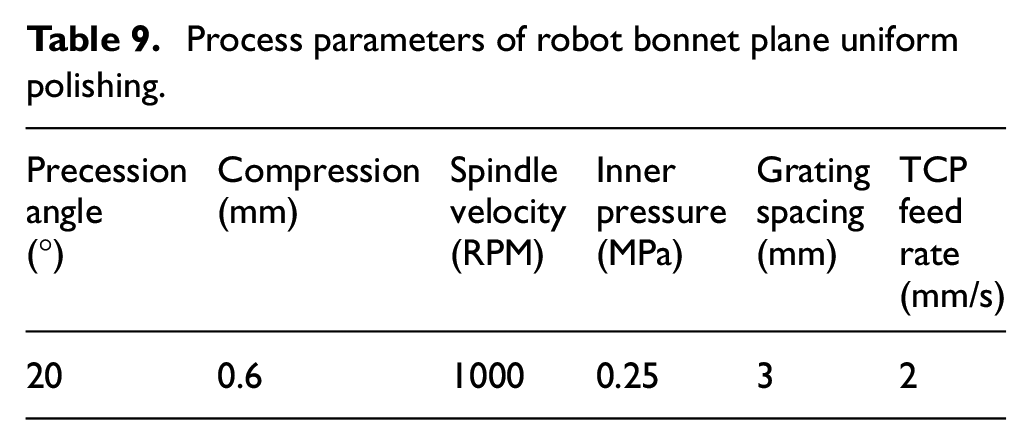
In order to further illustrate the feasibility of the optimization method, the plane uniform polishing experiment is carried out. Four areas of 75 mm × 25 mm are polished on 100 mm × 100 mm BK7 glass surface with four working postures by RABPS. The four areas correspond to four groups of different robot working stiffness respectively. The grating path is adopted for polishing. Table 8 shows the robot joint angles corresponding to the first and last polishing points in the grating paths of the four areas, and other experimental parameters are shown in Table 9.
Robot postures in plane uniform bonnet polishing experiment.
Process parameters of robot bonnet plane uniform polishing.
It is obvious that the four areas on the glass are clearly polished, as shown in Figure 18. The contours at the same position in the center of four polishing areas are extracted, and the surface morphology is measured using a Taylor-Hopson contourgraph, as shown in Figure 19. The surface roughness Ra at the center of the four polishing areas and the average working stiffness value under the corresponding robot posture are shown in Table 10.
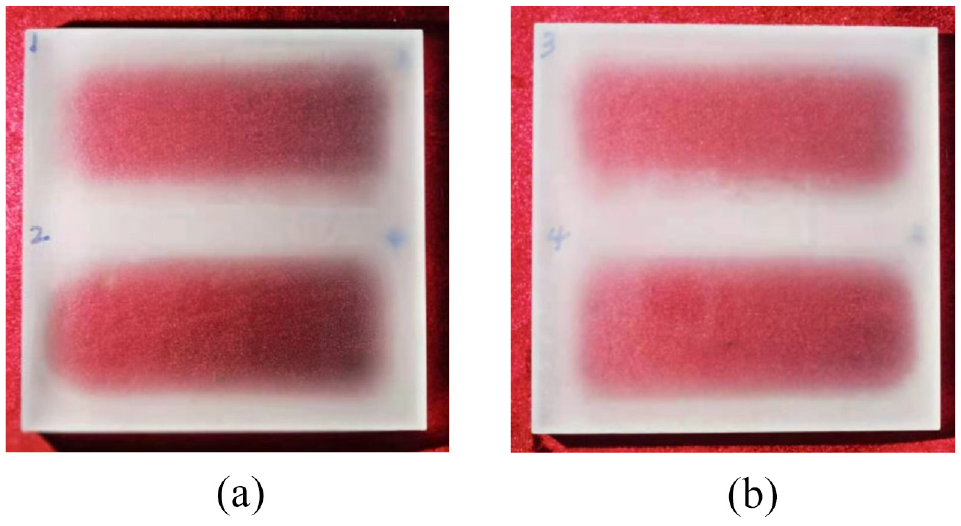
Robot bonnet polishing area: (a) the first and the second group of posture and (b) the third and the fourth group of posture.
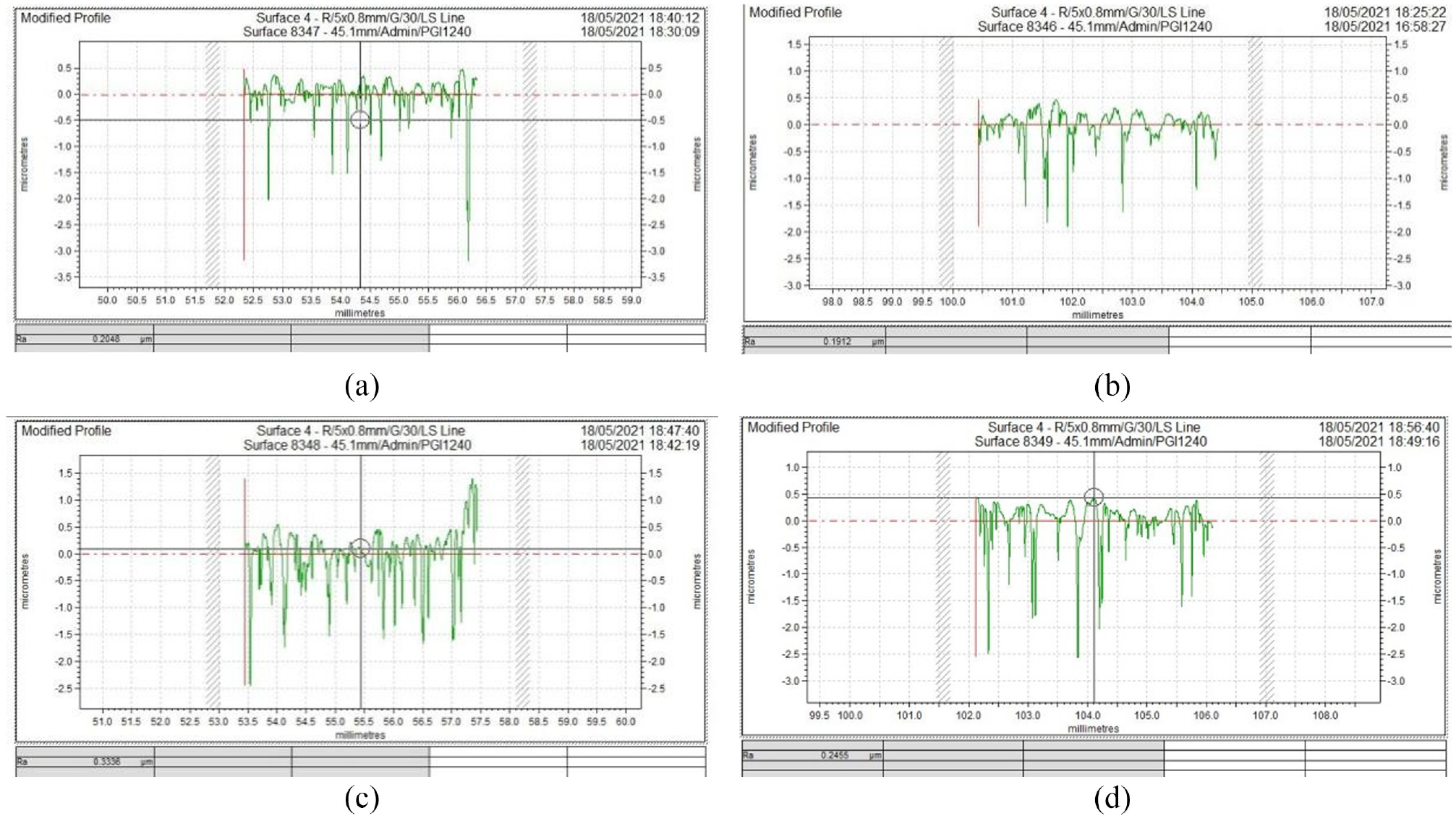
Surface roughness of robot bonnet polishing area: (a) the first group of robot posture, (b) the second group of robot posture, (c) the third group of robot posture, and (d) the fourth group of robot posture.
Comparison of robot working stiffness and workpiece roughness.

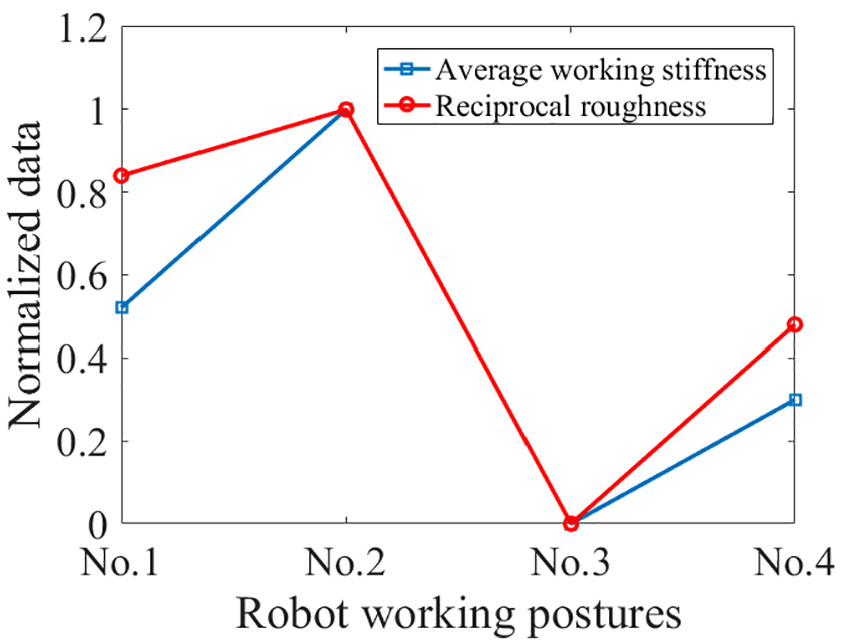
In order to compare the working stiffness of RABPS and the roughness of the workpiece intuitively, the data in Table 10 is normalized, and the change trend diagram is drawn as shown in Figure 20. For the convenience of comparison, the value of Ra is taken as the reciprocal.
Comparison of robot working stiffness and roughness of polished surface.
It can be seen from Figure 20 that the surface roughness of the workpiece shows the same change trend as the working stiffness of the robot. The better the static performance of the robot, the lower the roughness of the polished surface. Compared with the worst static performance (the third group) in Table 10, the roughness of polished surface is improved by about 42.9% after static performance optimization.
According to the experimental results, the stiffness optimization method in this paper can not only effectively improve the static stiffness performance of RABPS, but also improve the polishing effect of the workpiece surface in the plane uniform polishing, which has a good optimization effect. However, in the stiffness analysis of the robot, this paper only considers the force and linear displacement deformation that mainly affect the system, and ignores the effect of torque and the rotation deformation of the robot. In order to achieve a more comprehensive and accurate stiffness evaluation, the effect of torque and the rotation deformation of the robot can not be ignored, which needs further research.
Conclusions
Based on the influence of insufficient working stiffness on the polishing process during robot bonnet polishing, a posture optimization method is proposed in this paper. The main conclusions are as follows:
The terminal deformation caused by insufficient stiffness of the robot will not only affect the shape and size of the polishing contact area, but also affect the actual polishing removal amount.
Based on the evaluation of working stiffness, this paper proposes a robot static stiffness performance optimization method, and uses a polishing point on a straight path as an example to optimize the static performance of RABPS. The results show that the stiffness of the robot after posture optimization will increase, and the average increase rate reaches 50%. Moreover, the robot posture optimization also has a certain effect on improving the removal effect.
The original posture and optimized posture of RABPS were subjected to static pressure force measurement test and plane uniform polishing experiment respectively. The correctness of the static performance optimization method of RABPS proposed in this paper is validated according to the experimental results.
The stiffness optimization method based on working stiffness evaluation proposed in this paper can effectively improve the static stiffness performance of RABPS and improve the polishing effect, which makes up for the lack of stiffness of industrial robots in actual machining, expands the application scope of robots and reduces the cost.
However, this paper ignores the influence of torque and robot rotation deformation on robot stiffness, which needs further research. In addition, the processing components targeted in this paper are planar components. In the future, the posture optimization method in this paper will be extended to the processing of aspheric components to achieve comprehensive stiffness optimization of the whole surface of aspheric components.
Footnotes
Acknowledgements
The authors would like to thank the Beijing University of Technology and Xiamen University for financial support of this research.
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This work was financially supported by the National Natural Science Foundation of China (Grant No. 52075462, 51705011), and the Science and technology project of Shenzhen (Grant No. JCYJ20180306172924636).