
Abstract
Background:
Energy-storage and return feet incorporate various design features including split toes. As a potential improvement, an energy-storage and return foot with a dedicated ankle joint was recently introduced allowing for easily accessible inversion/eversion movement. However, the adaptability of energy-storage and return feet to uneven ground and the effects on biomechanical and clinical parameters have not been investigated in detail.
Objectives:
To investigate the design-related ability of prosthetic feet to adapt to cross slopes and derive a theoretical model.
Study design:
Mechanical testing and characterization.
Methods:
Mechanical adaptation to cross slopes was investigated for six prosthetic feet measured by a motion capture system. A theoretical model linking the measured data with adaptations is proposed.
Results:
The type and degree of adaptation depends on the foot design, for example, stiffness, split toe or continuous carbon forefoot, and additional ankle joint. The model used shows high correlations with the measured data for all feet.
Conclusions:
The ability of prosthetic feet to adapt to uneven ground is design-dependent. The split-toe feet adapted better to cross slopes than those with continuous carbon forefeet. Joints enhance this further by allowing for additional inversion and eversion. The influence on biomechanical and clinical parameters should be assessed in future studies.
Clinical relevance
Knowing foot-specific ability to adapt to uneven ground may help in selecting an appropriate prosthetic foot for persons with a lower limb amputation. Faster and more comprehensive adaptations to uneven ground may lower the need for compensations and therefore increase user safety.
Keywords
Background
Over the last few decades, prosthetic foot design has undergone noticeable changes. While solid-ankle cushioned heel (SACH) feet dominated the care of persons with lower limb amputation for some decades, energy-storage and return (ESR) feet are now more common. The most advanced prosthetic feet today are microprocessor controlled and support gait with active power.
Several researchers have investigated whether ESR feet are more beneficial than SACH feet in level walking.1–7 More challenging situations like slope ambulation and standing on slopes have been studied for a variety of prosthetic feet and analyzed with respect to their design properties.8–14 It was found that persons with a lower limb amputation may benefit from a larger range of motion (dorsi-plantar flexion),1,2,8,9,12 active ankle control,7–10 better energy storage and return,3,5–7,12,14 and active power support.7,11,13 Furthermore, some studies investigated gait on cross slopes as one aspect of uneven terrain,15–19 where of two additionally examined adaptations of prosthetic feet.18,19
In contrast to instrumented gait analyses, which are subject- and setup-dependent, mechanical testing of prosthetic feet provides more objective and reproducible results for categorizing feet according to their mechanical properties.20,21 Stiffness and ESR characteristics, including hysteresis effects, are important properties that have been tested for different dorsi/plantar-flexed positions to simulate prosthetic foot behavior in normal gait.22–25 It has also been shown that mechanical functions of prosthetic feet can be altered by footwear.22,26 Another important parameter, which can be emulated using mechanical testing, is the roll-over shape and therefore the course of the center of pressure (COP) beneath the foot during loading.27,28
Multiaxial range of motion describes the ability of prosthetic feet to adapt in the sagittal and frontal planes. A setup of mechanical tests to evaluate this ability was described by the American Orthotic and Prosthetic Association. 29 However, only a few researchers have investigated how the tilt of the ground or, similarly, inversion/eversion of the foot influences the behavior of prosthetic feet.23,26
A feature of some ESR feet are split toes, where the carbon blade of the forefoot is separated into lateral and medial parts (“toes”) that allow for vertical movement against each other. It has been assumed that this feature increases the inversion and eversion capability of a prosthetic foot, thus providing better multiaxial flexibility.30–33 Such behavior is designed to mimic the human foot, 30 thereby potentially granting increased safety while walking on uneven ground. 33 Although statements such as these found in patent applications30–33 seem logical, studies that systematically investigate whether split-toe feet facilitate walking on uneven terrain by an improved medio-lateral flexibility have yet to be undertaken. Knowing a feet’s flexibility will help correlate its mechanical characteristics with gait analyses or perceptions of persons walking on uneven ground.
The aim of this study was to analyze the adaptation of prosthetic feet to cross slopes and to derive a geometric model that describes these adaptations. For this purpose, feet with a continuous carbon forefoot, split toe, and split toe with a novel ankle joint for inversion/eversion designs were considered.
Method
Prosthetic feet
Six different prosthetic ESR feet were used to investigate foot-specific adaptations to cross slopes (Table 1 and Figure 1(b)). One foot (Axtion, Ottobock, Duderstadt, Germany) had a continuous carbon forefoot. All other feet featured split toes. Two feet of the same type (Triton LP, Ottobock, Duderstadt, Germany) and size but of different stiffness categories were used to investigate possible stiffness dependencies. Furthermore, two ESR feet of the same size and similar user-weight category, but with different designs (Pro-Flex® LP, Össur, Reykjavík, Iceland, and Pacifica® LP, Freedom Innovations, Irvine, USA), were investigated. In addition, an ESR prototype with a mechanical ankle joint (ESRJ) enabling ±10° of inversion/eversion with a deflection-dependent rotatory resistance was included. The joint aims to mimic functions of the human subtalar joint. The ESRJ foot uses the same carbon blade as the Triton LP foot.
Characteristics of the ESR feet.
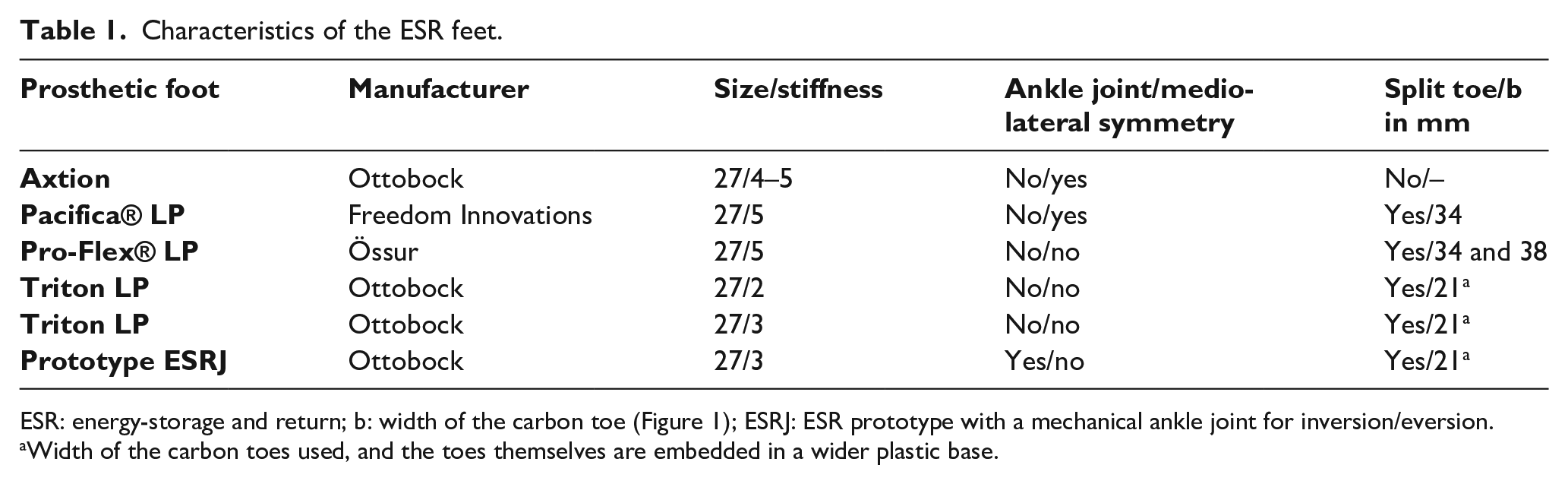
ESR: energy-storage and return; b: width of the carbon toe (Figure 1); ESRJ: ESR prototype with a mechanical ankle joint for inversion/eversion.
Width of the carbon toes used, and the toes themselves are embedded in a wider plastic base.
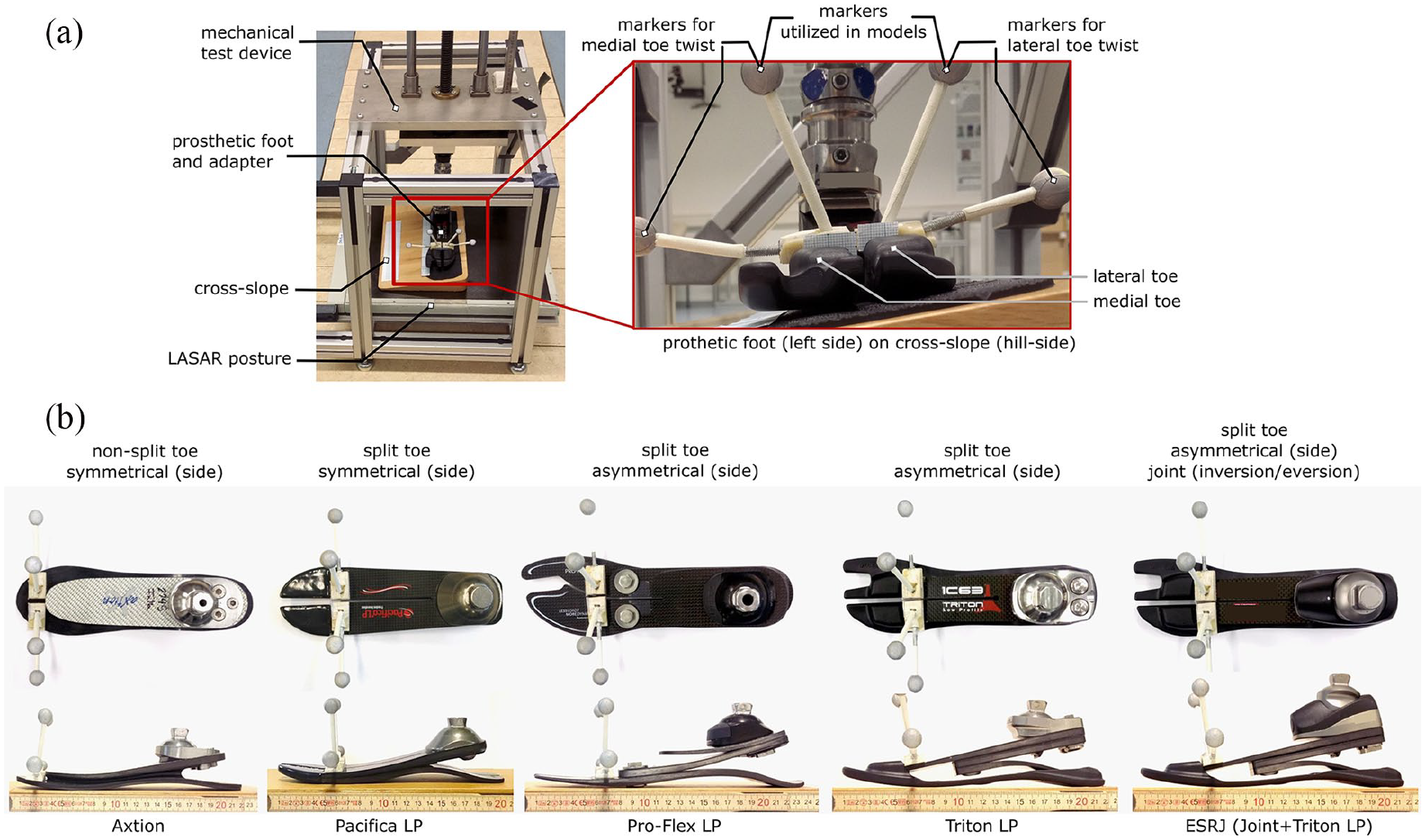
Mechanical test device and ESR feet used in the study. (a) The mechanical device was used to vertically apply an adjustable force to the feet, which were pressed against a wooden cross slope. The L.A.S.A.R Posture measured the applied force and the sagittal COP position. Those values were used to align the feet similarly (dorsi-plantar flexion). Four markers were applied to calculate the situation-dependent adaptation of the feet (b) with differing designs.
Experimental setup
The test device consisted of a self-locking crank for lowering and lifting the prosthetic foot within a solid metal frame. The feet were rigidly connected with a tube adapter to the device. A L.A.S.A.R Posture (Ottobock, Duderstadt, Germany) 34 was placed at the bottom of the frame to measure the applied vertical force and to estimate the sagittal COP position, which was used to align the feet similarly. To achieve this, the plantar flexed position of the foot was changed accordingly via the adjustment screws of the tube adapter (Table 2). With this start position (no load), the heel was lifted.
Measured COP position—distance from the heel after alignment of the feet.

COP: center of pressure; ESRJ: ESR prototype with a mechanical ankle joint for inversion/eversion.
Wooden blocks of 0° and 9.3° inclination were used to simulate level and cross-slope conditions (Figure 1). The blocks were dimensioned to investigate adaptation effects and represent an incline range often used in gait experiments.9,13,18,19 The cross slope and the surface of the L.A.S.A.R Posture were not rigidly coupled to the frame. This allowed for minor corrections, which effectively prevented constraining the degrees of freedom in the measurement setup.
Each foot was tested on level ground (0°) and on a cross slope (9.3°) for eversion (hill-side condition) and inversion (valley-side condition). Loads of 0, 10, 25, 37.5, 50, 62.5, 75, 87.5, and 100 kg were applied vertically through the tube adapter. With hill-side condition, the lateral side of an asymmetric ESR was oriented toward the hill-side resulting in an eversion. Conversely, for valley-side conditions, the medial side was oriented toward the hill-side resulting in an inversion. Tests were carried out without shoes or foot shells.
A pair of antenna markers was attached on top of each split toe to estimate adaptations of the foot to the slope (Figure 1). Kinematic data of these markers were measured with a motion capture system (12 cameras, Vicon Motion Systems, Oxford, UK). The vertical shift between the toe blades hmin was estimated with scale paper in order to directly estimate the shift (Figures 1(a) and 2(b)). The use of antenna markers was motivated by a future aim to measure adaptations of the foot in persons gait under real conditions (wearing foot shell and shoe).
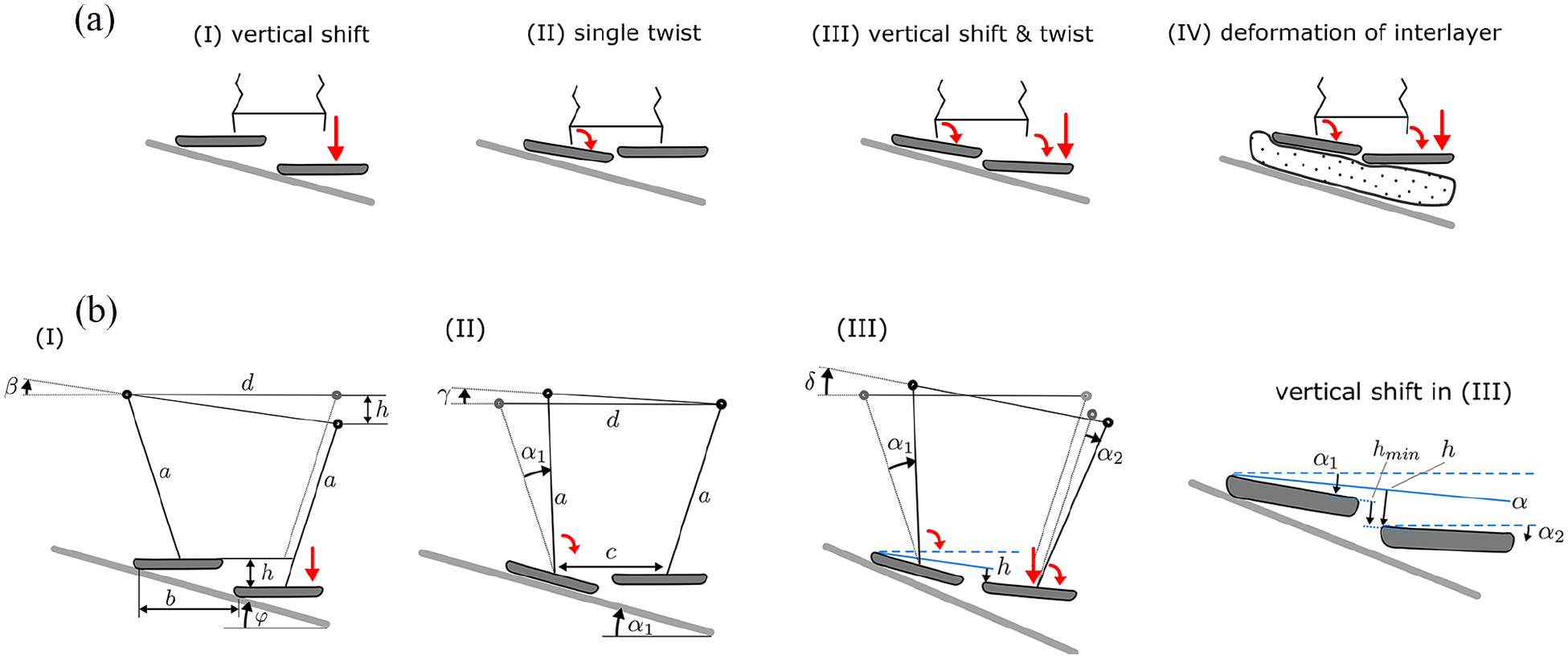
Different model approaches for the adaptation of split-toe energy-storage and return (ESR) feet to cross slopes. (a) from simple (I) to more complex (IV). (b) Illustration of geometrical constraints between measured angles (β, γ and δ —corresponding to the used model (I), (II), and (III), respectively) and adaptations to cross slopes. A full adaptation to the tilted ground is exemplified for model I and II but not for the mixed adaptation in (III). The vertical shift between the toes: hmin—minimum assumed shift, h—effective vertical shift. For model (III), the effective vertical shift h that considers the mean twist of lateral and medial toe (α, equation (5)) is used.
Three angles in the frontal plane were calculated for each condition from the recorded kinematic data: the lateral toe twist (equal α1 of model (III) for eversion, Figure 2), the medial toe twist (equal α2 of model (III) for eversion, Figure 2), and the overall adaptation (inversion/eversion) of the feet (equals δ of model (III), Figure 2). The values for level condition were used as reference and subtracted from those of cross-slope conditions. Furthermore, hmin, α1, and α2 were used to estimate the effective vertical shift h between split toes (Figure 2).
Models of adaptation
The carbon blade of the prosthetic feet deforms while walking or standing on cross slopes. From a mechanical point of view, different types of adaptations are conceivable for split-toe feet: a vertical shift of the split toes (Figure 2(I)), a twist of the blades (mechanically, a torsion, Figure 2(II)), and mixed states (Figure 2(III)). Furthermore, in everyday conditions, the carbon blade will deform the foot shell and shoe (Figure 2(IV)). For a prosthetic foot with a continuous forefoot (without split toes), a model similar to Figure 2 (II) is assumed. For the split-toe feet model (III) and equation (6) was used. See Table 3 for parameter description.
Parameters and variables of the models.
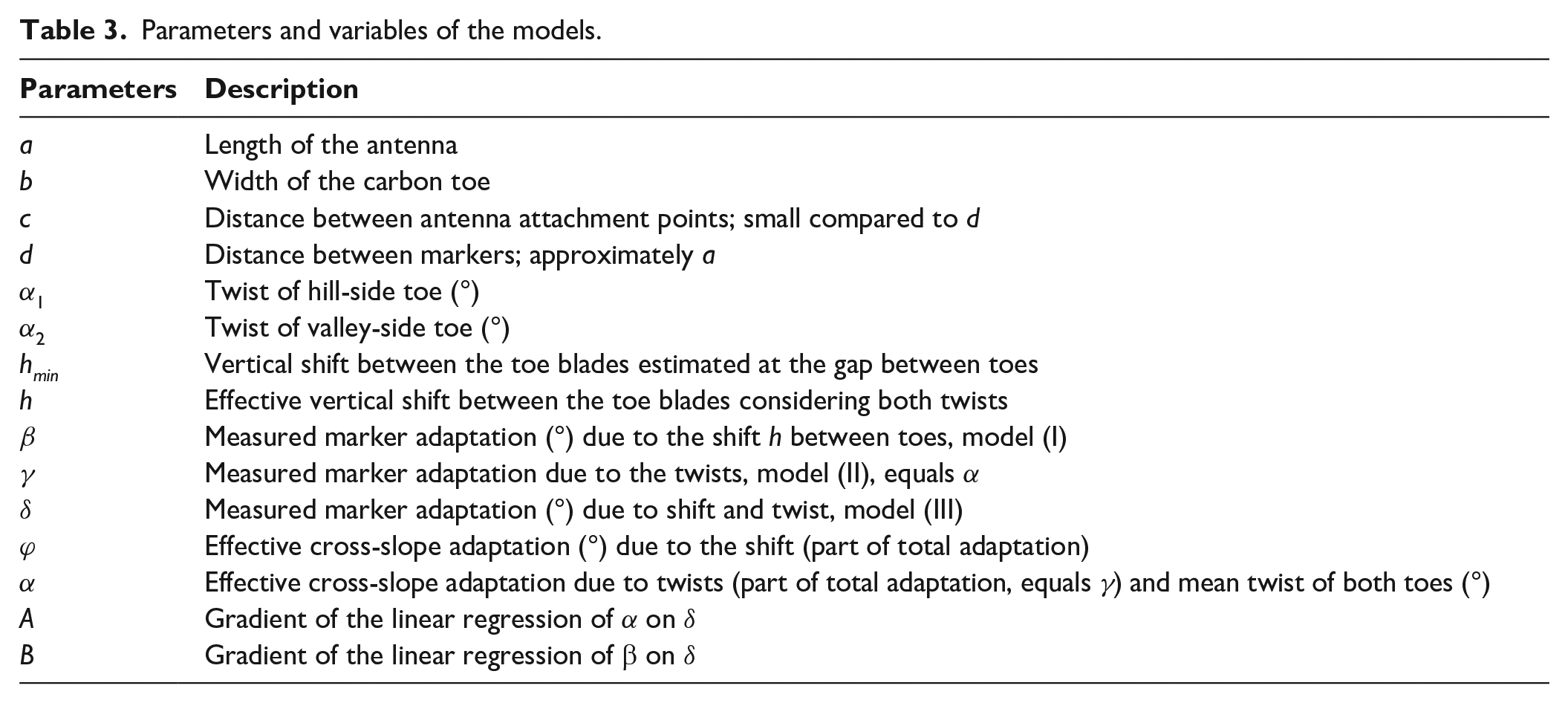
The models shown in Figure 2(b) utilize only two markers, one on each toe, to estimate the adaptations. A function is needed to transfer the measured angles β, γ, δ (for model (I), (II), and (III)) into an adaptation to the tilted ground in order to itemize the adaptations.
Simplified, it was assumed that the length a of the antennas is the same for both sides, that d is approximately a, that c is small compared to d, and that the markers are arranged horizontally in level conditions.
In the actual experiment, the angles (α1, α2, δ), the shift hmin, and the width of the toes b were measured. The distance d between the markers was assumed to be constant and set to 70 mm.
Vertical shift of toes—model (I)
Assuming only a vertical shift h of the toes (model (I), Figure 2), the measured angle is

which equals an effective cross-slope adaptation of

Likewise, a full adaptation to a given cross slope with a tilt of

Carbon fiber twist—model (II)
If assuming a twist of a single toe without a vertical shift (model (II) Figure 2) and an isosceles triangle between the antennas (c small in comparison to a), then

The same applies to the valley-side (similar to model (II) but not shown separately) so that the entire adaptation due to both twists is

which equals the mean rotation α and therefore the effective cross-slope adaptation due to twists.
Combined model—model (III)
An approximation for δ in model (III) is to sum equations (3) and (5)

Consider that γ and β are not independent variables but both functions of applied force and situation-dependent parameters (tilt angle, foot design, and alignment) and are non-linear (Figure 3).
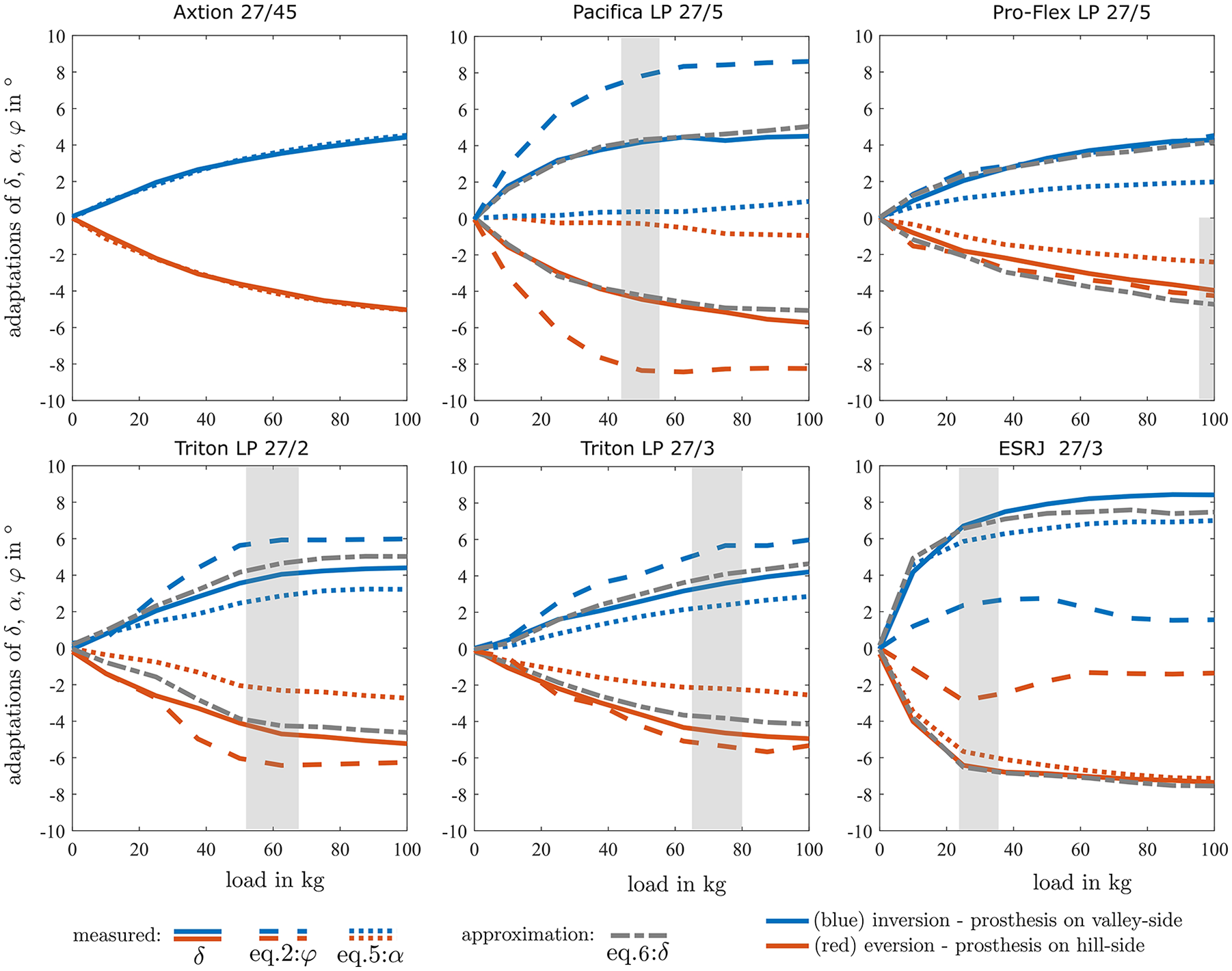
Measured and estimated adaptations to cross slopes for the investigated energy-storage and return (ESR) feet. The colored-solid lines show the measured angles δ , the colored-dashed lines the effective adaptation ϕ due to the shift, the colored dotted lines the mean rotation α of both toes. The dash-dotted lines give the approximated adaptation δ (gray) which are identical with δ (colored) in an ideal case. For asymmetric feet: positive adaptations for an inversion (valley-side conditions) and negative adaptations for an eversion (hill-side conditions).
Linear regression
Equation (6) is a linear model and justifies a linear regression analysis to obtain parameters to predict γ and β by measuring only δ. The gradients of the linear regression (A = γ/δ, B = β/δ) were calculated for each foot and both parameters. Following equation (6) with α + β = δ = A δ + B δ the sum of A and B should ideally be 1. Furthermore, the coefficients of determination (R2shift, R2 twist ) were calculated from the linear regression of ϕ and α (effective adaptations) on δ to evaluate the correlation.
Results
Adaptation to cross slopes
Distinct adaptations to cross slopes were found for the investigated feet (Figure 3). For the continuous carbon forefoot (Axtion), an adaptation in the form of a twist was seen. The foot adapted to approximately 50% of the cross-slope inclination at 100 kg loading. The twist α was almost equal to the angle δ. Due to the model used, α equals δ.
All investigated split-toe feet showed a mixture of twist and shift (Figures 3 and 4). The Pacifica® LP demonstrated proportionally the largest shift and the lowest twist (100 kg: 5.0 mm shift, 1.0° twist) and the ESRJ demonstrated proportionally the largest twist and the lowest shift (100 kg: 0.6 mm shift, 7.1° twist). Pronounced twists and shifts were observed for both Triton LPs (27/3 and 100 kg: 2.1 mm shift, 2.7° twist; 27/2 and 100 kg: 2.3 mm shift, 3.0° twist) and the Pro-Flex® LP (100 kg: 2.8 mm shift, 2.2° twist). For more details, see supplemental material.
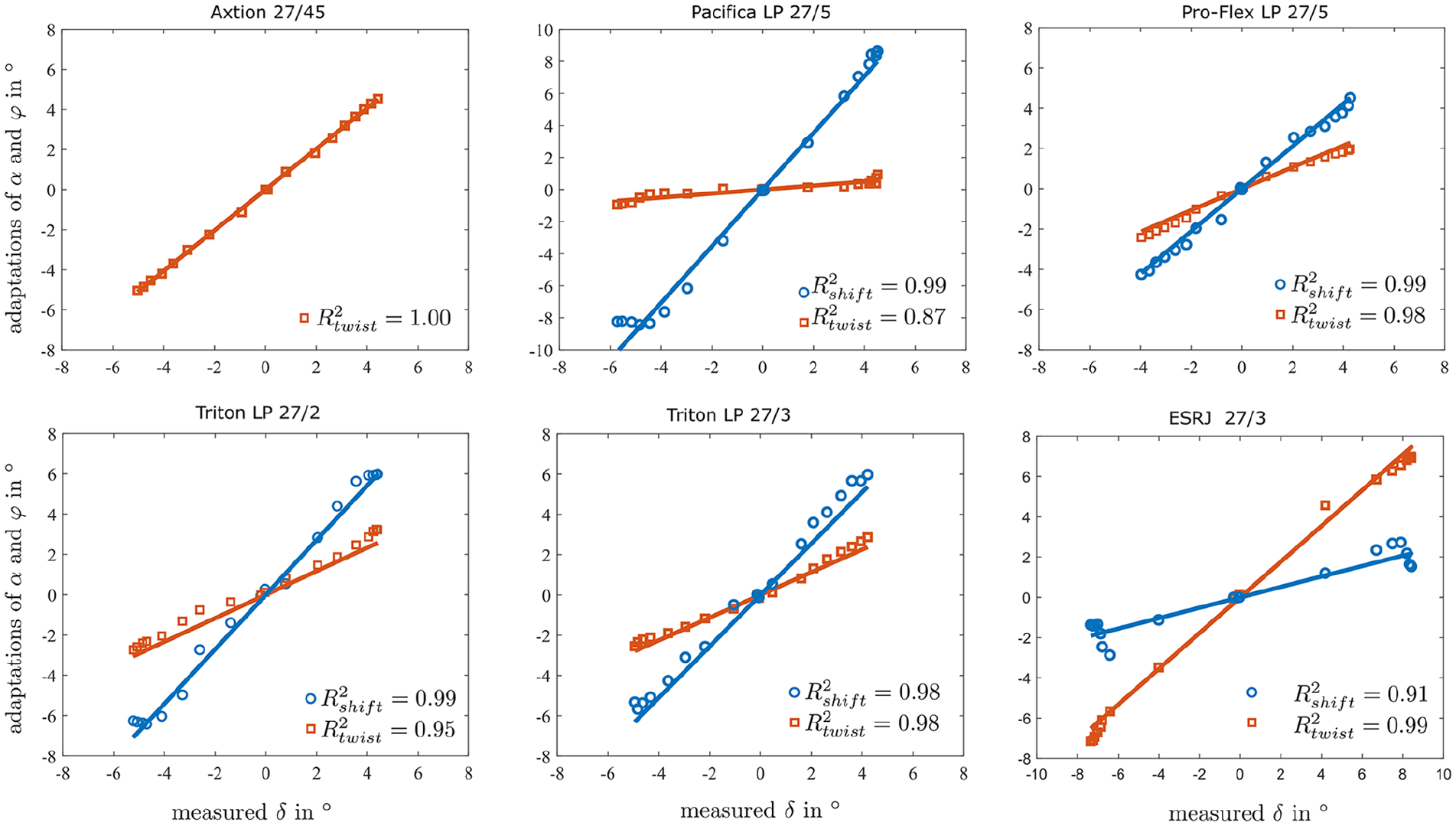
Linear regression of α and ϕ on δ. The ordinate shows the effective adaptation due to the shift (ϕ-circles) and twist (α-squares) while the abscissa shows the corresponding value of δ. The coefficients of determination R2 are given too. For asymmetric feet: positive δ for an inversion (valley-side conditions) and negative δ for an eversion (hill-side conditions).
Once both toes came in contact with the tilted ground at a corresponding load stage, it was interpreted as a full adaptation. Such a full adaptation was found for all split-toe feet but occurred at different loading stages for each foot (gray areas in Figure 3)—first for the ESRJ at about 25 kg and last for Pro-Flex® LP at about 100 kg. With further increased load beyond this point, the shift stayed almost constant (Pacifica® LP and Triton LP) or decreased (ESRJ), while α continued to gain.
The Triton LP with stiffness category 2 showed a more pronounced adaptation than the Triton LP with stiffness category 3 for the same load. Furthermore, small differences in adaptation depending on the side were found for asymmetric foot designs (Figure 3).
The prediction of δ with model (III) matched the measured values with minor deviations (Figure 3). For the split-toe feet, an average difference of 0.4° for 50 kg and 0.6° for 100 kg with a maximum difference of 1.1° (ESRJ valley-side/inversion, 80–100 kg) was found.
Correlation between adaptations
The determined effective adaptations α and ϕ show strong linear correlations with δ for all feet (Figure 4). The lowest coefficients of determination were found for the twist of the Pacifica® LP (R2 = 0.87) and the shift of the ESRJ (R2 = 0.91). Note, the lowest coefficients were found for minor adaptations, while major adaptations showed higher coefficients (R2 ⩾ 0.95).
The gradient of the linear regression of α and β on δ range from [A = 0.89, B = 0.07] for the ESRJ to [A = 0.12, B = 0.86] for the Pacifica® LP reflecting that the investigated feet adapt differently. The sum of A and B (ideally 1) delivered values ranging from 0.92 to 1.07. See supplemental material for additional information.
Discussion
Conducting mechanical tests on cross slopes revealed how ESR feet adapt to tilted ground. In general, two different adaptation types for feet with split toes were found: a twist of the toes and a vertical shift of the toes. The latter is only possible due to the split-toe design element that is a major design difference to continuous carbon blade ESR feet. It was argued in several patents30–33 that such a feature will enhance adaptability on uneven ground but, to the best of the authors’ knowledge, this has never been studied in detail. Here, it is shown for the first time that the split-toe feature in commercially available prosthetic feet enables an improved adaptability compared to similarly stiff feet with a continuous carbon forefoot.
The magnitude of adaptation depends on the design of the prosthetic foot. This includes the thickness and width of the carbon toes, mechanical properties of the fiber composite, side asymmetry, or additional ankle joint for inversion/eversion. If compressed with the same load, the softer foot showed larger adaptations to the cross slope than the stiffer foot (Triton LP). A similar toe width does not necessarily lead to similar adaptations (compare Pacifica® LP to Pro-Flex® LP, Figure 3). Therefore, internal fiber orientation, laminate geometry, and type of resin seem to play a crucial role. For the asymmetrical feet (Triton LP and Pro-Flex® LP) only minor differences in adaptation were observed between lateral and medial sides. Reasons for these minor deviations are probably that the feet have an asymmetrical shape in the toe region but a similar width of the carbon toes and a symmetrical shape in the midfoot region.
The earliest full adaptation to the cross slopes was achieved with the ESRJ foot, featuring a mechanical ankle joint combined with a split toe. With this specific design, both toes made contact with the tilted ground at a load of approximately 25 kg. For this foot, the ankle joint for inversion and eversion contributed to the majority of the adaptation (about 90%). In contrast, the ESR foot with the same carbon structure achieved full adaptation at about 70 kg (with approximately 30% twist and 70% shift).
Two types of adaptations were observed for split-toe feet that are present at the same time but differ in relation between feet. In the used approach, “full adaptation” was achieved if both toes came in contact with the tilted ground. It is obvious that an adaptation beyond this point can only be achieved by further twisting of the toes. This study did not investigate which type (or ratio) of adaptation might be superior or if an increased adaptability is accompanied by disadvantages. Furthermore, a foot shell (ideally optimized to its carbon base) and shoes 26 can have significant influence on the overall performance of prosthetic feet but were not considered in this study. However, it can be argued that an ESR foot, featuring high degrees of both adaptations, has an advanced ability to adapt to different ground conditions. For standing or walking on cross-slopes biomechanical parameters like COP and ground reaction forces are likely to be influenced by the adaptability of the prosthetic foot. Consequently, clinically relevant parameters like knee adduction moment or medio-lateral stability might be influenced.18,35 Once the adaptability of the carbon base is known, it can be compared and correlated with gait analyses of persons using the same feet in order to determine which type of adaptation is more beneficial and to what degree (stability vs flexibility, appropriate K-level, etc.).
In 2010, the American Orthotic and Prosthetic Association published recommendations for mechanical tests to categorize prosthetic feet. 29 One part of the test for multiaxial capabilities includes investigation of medio-lateral adaptability. For this test, the prosthetic foot is fixed in a cage, particularly clamping the toe region, and therefore most likely restricts the vertical shift of split toes against each other. Consequently, such a test setup would underestimate the medio-lateral adaptability of split-toe feet. Nonetheless, it is desirable to categorize prosthetic feet across manufacturers with a metric that includes its stiffness category and medio-lateral adaptability to help prosthetists selecting an appropriate foot. For the medio-lateral adaptability, a variable revealing the point of full adaptation or the sum of the effective adaptations (twist and shift) could be used.
Another main goal of this study was to develop an appropriate model to describe the adaptation of prosthetic ESR feet to cross slopes. It was shown that a marker set with two antenna markers can be used as a method to estimate the amount of adaptation by utilizing a motion capture system typically installed in gait laboratories. A linear approach motivated by a theoretical derivation was used to describe this relationship (Figure 4). It was found that the linear approach describes the observed adaptation in detail (high correlations). As mentioned above, the effects of foot shell and shoe have not been investigated. If these effects do not significantly alter the derived foot-specific coefficients, they might be used in gait analyses in order to characterize the adaptability of prosthetic ESR feet in different situations and to link it to biomechanical gait parameters. In such experiments the carbon base would be covered by a foot shell and shoe, which requires an indirect measurement method like the use of antenna markers. However, a future study based on the presented method that investigates different conditions (feet, shell, and shoe) and the influences on the adaptation and the foot-specific coefficients seems appropriate to generalize the findings. At the same time, different dorsi/plantar-flexed positions could be investigated to simulate an entire stance phase. Here, the relationship between the measured angle (δ) and foot adaptation (shift and twist) was estimated while the foot was flat on the ground (full load). Technically, it limits validity of the model to a corresponding period of the gait cycle.
Conclusion
The ability of prosthetic feet to adapt to cross slopes is design-dependent. Feet that feature a split-toe design adapt better to cross slopes than continuous carbon forefoot feet tested. An ankle joint allowing for additional inversion and eversion further enhances adaptability. Furthermore, a theoretical model was successfully derived that described the feet-dependent adaptations. The influence of foot adaptability on biomechanical and clinical parameters of walking and standing on uneven ground should be investigated in future. These findings may help prosthetists and clinical decision makers in the prescription process for selecting an appropriate prosthetic foot to persons with a lower limb amputation.
Supplemental Material
10.1177_0309364620917838_Supplemental_material – Supplemental material for Characterizing adaptations of prosthetic feet in the frontal plane
Supplemental material, 10.1177_0309364620917838_Supplemental_material for Characterizing adaptations of prosthetic feet in the frontal plane by Michael Ernst, Björn Altenburg and Thomas Schmalz in Prosthetics and Orthotics International
Footnotes
Acknowledgements
We would like to thank Dr. Andreas Kannenberg, Brooke Hancock, and Christian Edelkraut for proofreading and helpful notes.
Author contributions
Conceived and designed the experiment: all. Performed experiments and analyzed data: ME. Derivation of models and equations: ME. Wrote and edited the manuscript: ME, BA. All authors read and approved the final manuscript.
Declaration of conflicting interests
The author(s) declared the following potential conflicts of interest with respect to the research, authorship, and/or publication of this article: All authors are full-time employees of Ottobock SE & Co. KGaA. The feet investigated in the study are from different prosthetic manufacturers (Ottobock, Össur, Freedom Innovations). The investigated ESRJ prototype is now commercially available (Triton Side Flex 1C68, Ottobock).
Funding
The author(s) received no financial support for the research, authorship, and/or publication of this article.
Supplemental material
Supplemental material for this article is available online.
References
Supplementary Material
Please find the following supplemental material available below.
For Open Access articles published under a Creative Commons License, all supplemental material carries the same license as the article it is associated with.
For non-Open Access articles published, all supplemental material carries a non-exclusive license, and permission requests for re-use of supplemental material or any part of supplemental material shall be sent directly to the copyright owner as specified in the copyright notice associated with the article.