
Abstract
Background:
In 1970, Mori hypothesised the existence of an ‘uncanny valley’, whereby stimuli falling short of being fully human are found to be creepy or eerie.
Objectives:
To investigate how eerie people find different prosthetic hands and whether perceptions of eeriness can be accounted for by categorical ambiguity.
Study design:
Students participated in computerised experiments during which photographic images of hands were presented.
Methods:
We compared photographs of prosthetic hands pre-selected as more (H+) or less human-like (H–), as well as mechanical and real hands. Participants rated the hands for eeriness and human-likeness, as well as performing a speeded classification (human/non-human) and location judgment (control) task.
Results:
The H– prosthetic hands were rated as more eerie than the H+ prosthetic, mechanical and real hands, and this was unaffected by hand orientation. Participants were significantly slower to categorise the H+ prosthetic hands compared to the H– prosthetic and real hands, which was not due to generally slower responses to the H+ prosthetic hands (control task).
Conclusion:
People find prosthetic hands to be eerie, most consistently for less human-like prosthetic hands. This effect is not driven by ambiguity about whether to categorise the prosthetic hand as human or artificial.
Clinical relevance
More obviously artificial, less-realistic, prosthetic hands consistently generate a sense of eeriness, while more realistic prosthetic hands avoid the uncanny valley, at least on initial viewing. Thus, greater realism in prosthetic design may not always incur a cost, although the role of movement and cutaneous input requires further investigation.
Background
In 1970, the roboticist Mori 1 hypothesised that as artificial stimuli become more human-like, our affinity towards them increases, but for levels of human-likeness just below that of a real human, there is a sudden decline in affinity. This effect is often accompanied by feelings of eeriness, repulsion or unsettlement. This was termed the ‘uncanny valley’, to describe the associated negative affect and analogise the shape of its graphical representation. In his original account, Mori positioned prosthetic hands within the uncanny valley. While users may prefer their prosthesis to be as human-like as possible in order to blend in, 2 Mori’s account suggests that a higher level of human-likeness brings the risk that observers experience a sense of eeriness upon discovering that the limb is a prosthesis. 3 Therefore, it is of relevance to users and designers of prosthetic limbs to understand the cause and characteristics of the uncanny valley in relation to prostheses.
Although Mori conceived of the uncanny valley more than 40 years ago, empirical investigations have only been carried out more recently, with the majority exploring the uncanny valley for faces. 4 The first empirical demonstration that participants rate prosthetic hands as more eerie than mechanical and real hands was reported in 2013. 5 Moreover, when only prosthetic hands were analysed, those rated as less human-like were rated as more eerie. Since the sample of hands used was opportunistic, the first aim of this work was to more systematically explore responses to prosthetic hands selected for higher and lower human-likeness, using a new stimulus set matched for hand posture. Our second aim was to examine the effect of viewing orientation by presenting the hands from a first-person (egocentric) or a third-person (allocentric) perspective. The area of the brain involved in visually perceiving body parts (extrastriate body area) responds differentially to body parts presented from the first- versus third-person perspective.6,7 Therefore, we hypothesised that participants might rate hands as more eerie when viewed from the first-person perspective.
Various accounts of the uncanny valley have been proposed, 8 and two possible explanations are particularly relevant to prosthetic hands. The mismatch hypothesis suggests that features or cues that are inconsistent produce a negative response. 9 Indeed, Mori hypothesised that a prosthetic hand would evoke eeriness when touched, since its temperature and hardness would contrast with the visual appearance of a human-like hand. The categorical ambiguity hypothesis suggests that the difficulty in categorising the stimulus as either human or non-human produces negative affect. 8 This is supported by evidence using photographic images morphed as blends between human and the artificial showing that people dislike faces that they are slower to categorise. 10 Therefore, the third aim of this study was to investigate whether the eeriness evoked by prosthetic hands is linked to categorical ambiguity. If this is the case, we would expect participants to be slowest to categorise the hands (human vs artificial) that they rate as most eerie. Since reaction times can also be slowed down by negative affect itself,11,12 we used a control task which involved judging the location of the hand to investigate the general influence of viewing the hands on speeded responses. We hypothesised that responses would be slower for the hands rated as most eerie.
Methods
Participants
All participants were right-handed student volunteers. A total of 40 participants (32 female; mean age 20.9 years, standard deviation (SD) = 1.28) were recruited for Experiment 1 and 50 (45 female; mean age 19.6, SD = 2.16) for Experiment 2. The study had University of Manchester Research Ethics Committee approval. Participants gave written consent having read a participant information sheet and were compensated with course credit. A total of 10 additional right-handed participants (8 female; mean age 20.5, SD = 1.84) were used for stimulus characterisation (see below).
Materials
In total, 12 photographic images were used (Figure 1(a)) with three exemplars in each category: real human, mechanical, prosthetic realistic (H+) and prosthetic unrealistic (H–). These were selected from 21 images using human-likeness ratings from naïve participants (using a 9-point scale, see Procedure). The selected human (range 8.6–8.9) and mechanical (1.1–1.4) hands were the exemplars with the highest and lowest human-likeness ratings, and the ratings were used to separate the H+ (5.4–5.9) and H– (3.6–3.9) categories. Each image had a resolution of approximately 650 × 500 pixels and depicted the back of the hand, cropped at the wrist, presented on a black background (Figure 1(a)). In Experiment 1, stimuli were presented from a first-person (wrist downwards) or a third-person (wrist upwards) perspective by vertically flipping the image and as a left or right hand by horizontally flipping the image. Presentation of stimuli and recording responses were conducted using E-Prime software. Stimuli were viewed on a 17-in computer screen with a viewing distance of approximately 60 cm (Experiment 1) and 30 cm (Experiment 2).
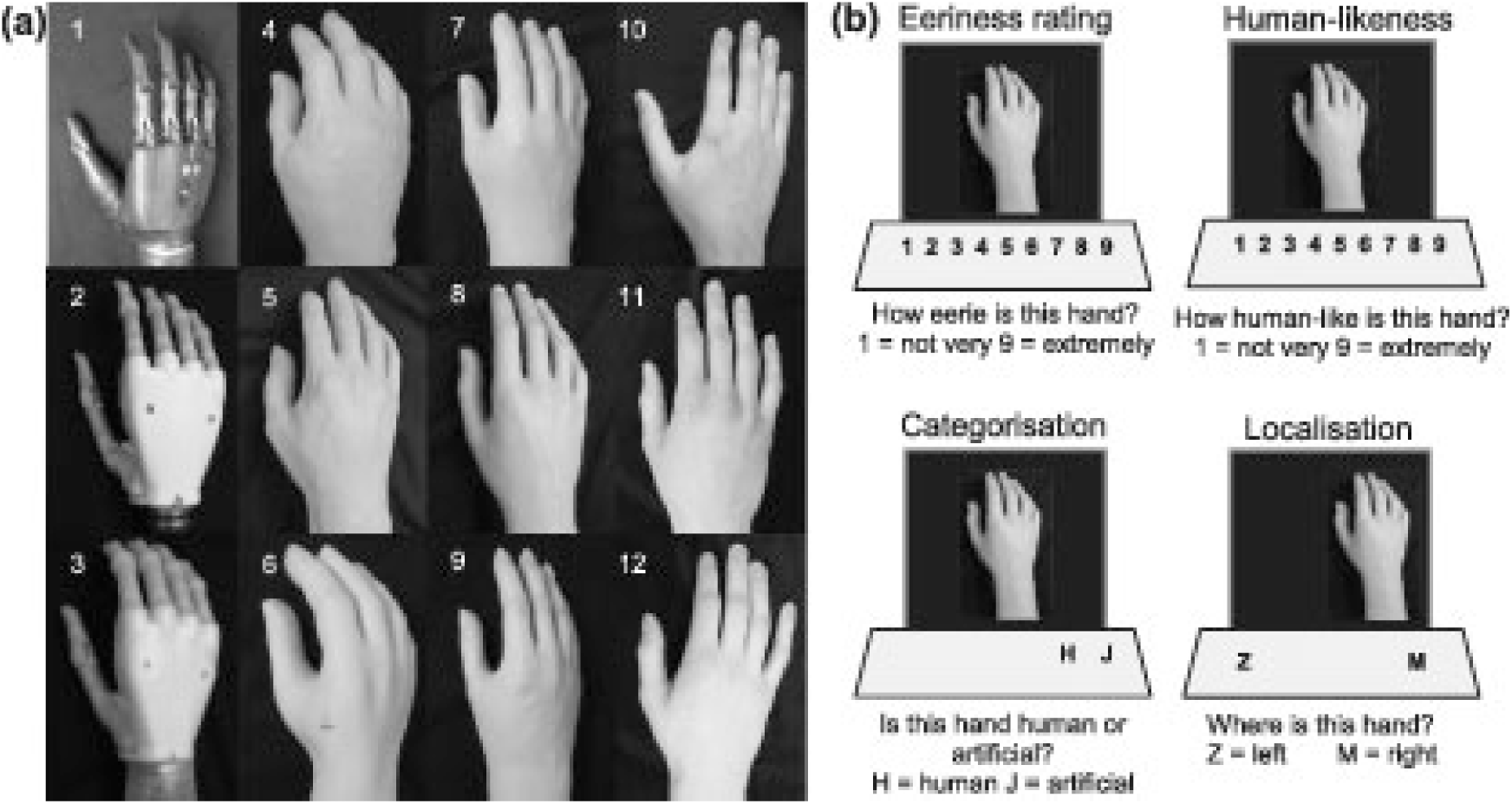
The hand stimuli used in the study: (a) three exemplars of mechanical hands (1–3), less human-like (H–) prosthetic hands (4–6), more human-like (H+) prosthetic hands (7–9) and real hands (10–12) and (b) the four different tasks used in the study.
Procedure
For the stimulus characterisation, participants viewed a series of photographic images of real and prosthetic hands. The hand stimuli were presented as right hands and from a first-person perspective. A definition of human-likeness (‘having human form or attributes’) was given to participants. Participants rated the stimuli for human-likeness on a 9-point scale (Figure 1(b)). Each image was presented individually on a computer screen, where it remained until participants had rated the image. The next image was then presented. Each image was preceded by a fixation slide, which comprised a small cross in the centre of the screen, visible for 2000 ms. To avoid order effects, the images were randomly ordered.
In Experiment 1, participants judged the eeriness of the presented hands (Figure 1(b)), which was defined as ‘mysterious, strange, or unexpected as to send a chill up the spine’. Each image was preceded by a cross presented in the centre of the screen for 2000 ms, and a reminder of the question was presented alongside every image. The image remained onscreen until the participant provided their rating on a 9-point scale, after which the next trial commenced. Each of the 12 hand exemplars was presented as a left and right hand (horizontally flipped) and from a first-person and third-person perspective (vertically flipped). All 48 trial types were presented once in a random order before being presented for a second time in a random order (96 trials in total). Participants were instructed to rate each image individually and to avoid rating them in comparison to those previously viewed.
In Experiment 2, participants carried out four tasks (see Figure 1(b) for overview of tasks). They first rated the eeriness of the 12 hands as before (except that the fixation cross was replaced by a 1000 ms blank screen), viewing each exemplar twice as a right hand from a first-person perspective (24 trials). They then carried out the categorisation and localisation tasks; half of the participants completed the categorisation task first and half completed the tasks in the opposite order. In the categorisation task, they were asked to categorise each hand as either human or artificial, as quickly and accurately as possible by pressing ‘H’ for human or ‘J’ for artificial with their right hand. Each hand exemplar was categorised 12 times (144 trials), with the order randomised. Following the participant’s response, the screen turned blank for 1000 ms before the next trial. In the localisation task, each hand exemplar was presented six times to the left of the screen, and six times to the right of the screen (144 trials). Participants were asked to indicate the spatial location of each hand image as quickly and accurately as possible, by pressing ‘Z’ or ‘M’ with their left and right hand, respectively. To ensure that participants attended to the stimuli, 13 participants were given an additional task. They were instructed to respond by pressing the spacebar if they saw a small purple square (16 × 16 pixels) in the centre of the hand image. The square was presented in 12 additional trials. Finally, as a manipulation check, participants carried out a human-likeness rating task, viewing each of the 12 hand exemplars twice (24 trials).
Analysis
In Experiment 1, the ratings of eeriness for left and right images were averaged prior to analysis. In Experiment 2, reaction times were removed if they were extremely low (<150 ms) or high (>2000 ms for categorisation, 3.4% removed; >1000 ms or incorrect response for localisation, 2.1% removed following the removal of one participant with a very high error rate, 46.5%); incorrect responses were included in the averages for the categorisation task. For the localisation task, responses were averaged across left and right locations. Repeated measures analyses of variance (ANOVAs) were used with Greenhouse Geisser corrections, which were followed up using repeated contrasts.
Results
Experiment 1
A Hand Type (mechanical, prosthetic H–, prosthetic H+, Real) × Orientation (first-person, third-person) repeated measures ANOVA was used to explore eeriness ratings (see Figure 2(a)). There was a significant main effect of Hand Type (F(1.7, 65) = 86.02, p < .001, partial η2 = .688). Prosthetic H– hands were rated as significantly more eerie than both mechanical (F(1, 39) = 20.9, p < .001, partial η2 = .349) and prosthetic H+ hands (F(1, 39) = 118.8, p < .0005, partial η2 = .753). Prosthetic H+ hands were, in turn, rated as significantly more eerie than real hands (F(1, 39) = 214.0, p < .001, partial η2 = .846). Note that eeriness generally reduced with increased human-likeness, with the exception of the mechanical hands which had intermediate ratings of eeriness, but were lowest in human-likeness. Neither the main effect of Orientation (F(1, 39) = .85, p = .361, partial η2 = .021) nor the interaction between Hand Type and Orientation (F(2.8, 108) = .51, p = .674, partial η2 = .013) were significant.
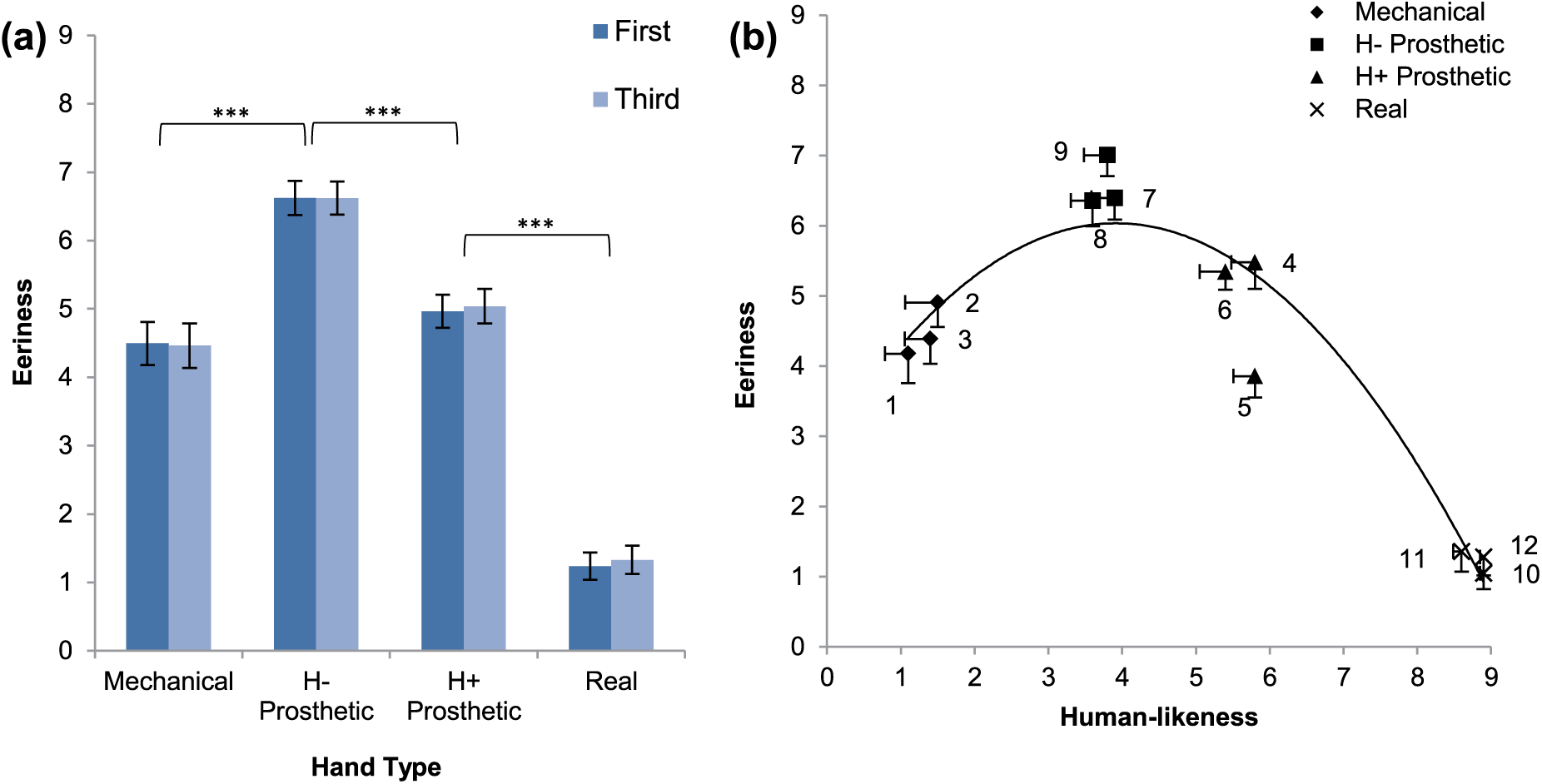
(a) Mean (±SEM) eeriness ratings for each type of hand presented from the first- and third-person perspective and (b) mean eeriness (–SEM) ratings plotted against mean human-likeness ratings for individual hand exemplars; the numbers refer to the images in Figure 1.
The relationship between eeriness and human-likeness was further explored across the different hand exemplars in the right egocentric orientation (Figure 2(b)). Although there was a significant negative linear correlation between ratings of eeriness from Experiment 1 and human-likeness from the stimulus characterisation phase (r2(12) = .47, p = .015), the relationship was better captured by a significant quadratic relationship (r2 = .92, p < .001).
Experiment 2
Hand type significantly affected eeriness ratings (F(2.0, 99) = 86.18, p < .001, partial η2 = .64; Figure 3(a)). Prosthetic H– hands were rated as more eerie than prosthetic H+ hands, F(1, 49) = 145.82, p < .001, partial η2 = .74) which in turn were rated more highly than human hands (F(1, 49) = 136.21, p < .001, partial η2 = .75). Mechanical hands received lower eeriness ratings than prosthetic H– hands, and this difference was borderline significant (F(1, 49) = 3.97, p = .052, partial η2 = .08).
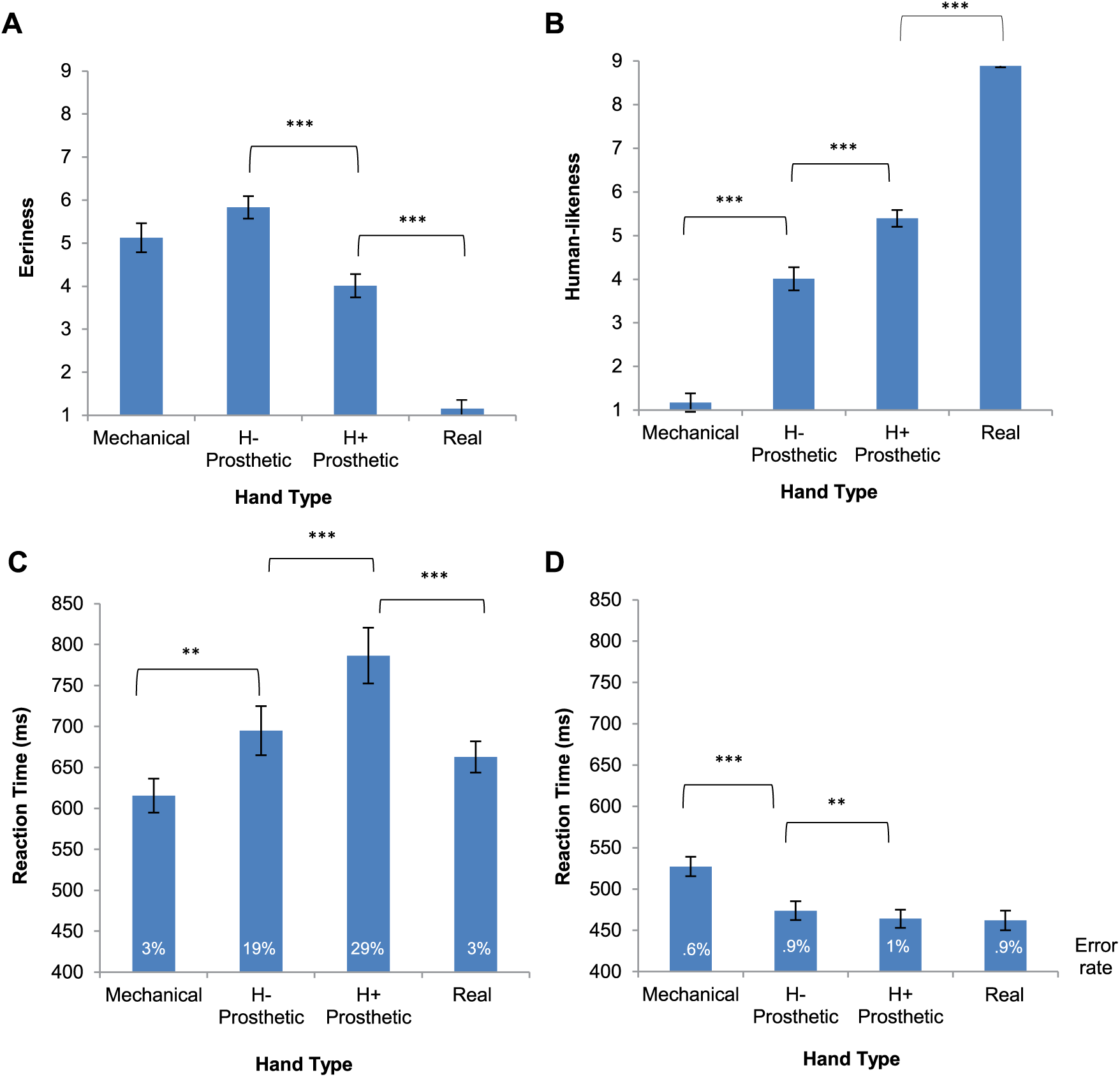
Descriptive statistics for the results of the four tasks across each hand type: (a) mean eeriness rating, (b) mean human-likeness rating, (c) mean reaction time (ms) to categorise hands as human or artificial and (d) mean reaction time (ms) to categorise by spatial location. Mean error rates are presented in (c) and (d). Note that ** denotes significant at p < .01; *** significant at p < .001.
Hand type significantly affected human-likeness ratings (F(2.0, 98) = 369.49, p < .001, partial η2 = .88; Figure 3(b)). Significant differences were found between all hand types in ascending order: prosthetic H– hands were rated as significantly more human-like than mechanical (F(1, 49) = 85.42, p < .001, partial η2 = .64), prosthetic H+ hands were rated as significantly more human-like than prosthetic H– (F(1, 49) = 86.89, p < .001, partial η2 = .64) and human hands were rated as significantly more human-like than prosthetic H+ (F(1, 49) = 331.69, p < .001, partial η2 = .87).
Hand type significantly affected categorisation reaction times (F(1.9, 94.6) = 23.96, p < .001, η2 = .33; Figure 3(c)). Categorisation of prosthetic H– hands was slower than for mechanical hands (F(1, 49) = 11.11, p = .002, partial η2 = .19), but significantly faster than for prosthetic H+ hands (F(1, 49) = 33.94, p < .001, partial η2 = .41), while categorisation of human hands was significantly faster than prosthetic H+ hands (F(1, 49) = 31.56, p < .001, partial η2 = .39). Error rates were not analysed statistically, but the error rate was highest for the prosthetic H+ hands (Figure 3(c)).
Hand type significantly affected localisation reaction times (F(2.6, 122.7) = 102.25, p < .001, partial η2 = .68; Figure 3(d)). Reaction time for prosthetic H– hands was significantly decreased relative to mechanical (F(1, 48) = 122.08, p < .001, partial η2 = .72) and significantly higher than for prosthetic H+ hands (F(1, 48) = 7.73, p = .008, partial η2 = .14). The difference in reaction time between H+ prosthetic and human hands was not statistically significant (F(1, 48) = 0.32, p = .573, partial η2 = .01). Error rate was very similar across hand types. Participants performed the additional task (responding to the purple square) with a good level of accuracy (89.1%) showing that they were attending to the images.
The relationship between categorisation times and eeriness ratings was further explored for individual hand exemplars and showed a curvilinear relationship, when the real hands were excluded (Figure 4(a)). H– prosthetic hands were rated as most eerie, while falling in the midrange of the reaction time data. As seen in the analyses above, participants were slowest to categorise the H+ prosthetic hands. Mechanical hand types were found to generate the fastest responses overall and generated intermediate levels of eeriness. Note that aside from the positioning of the real hands, Figure 4(a) is very similar to the relationship between eeriness and human-likeness ratings obtained in Experiment 1 (Figure 2(b)). Therefore, we examined the relationship between human-likeness ratings and categorisation response times (RT) (Figure 4(b)). The artificial hands exhibited a linear relationship ascending from mechanical to realistic prosthetic (r(7) = .92, p = .001); participants were slower to categorise the artificial hands that they rated as more human-like.
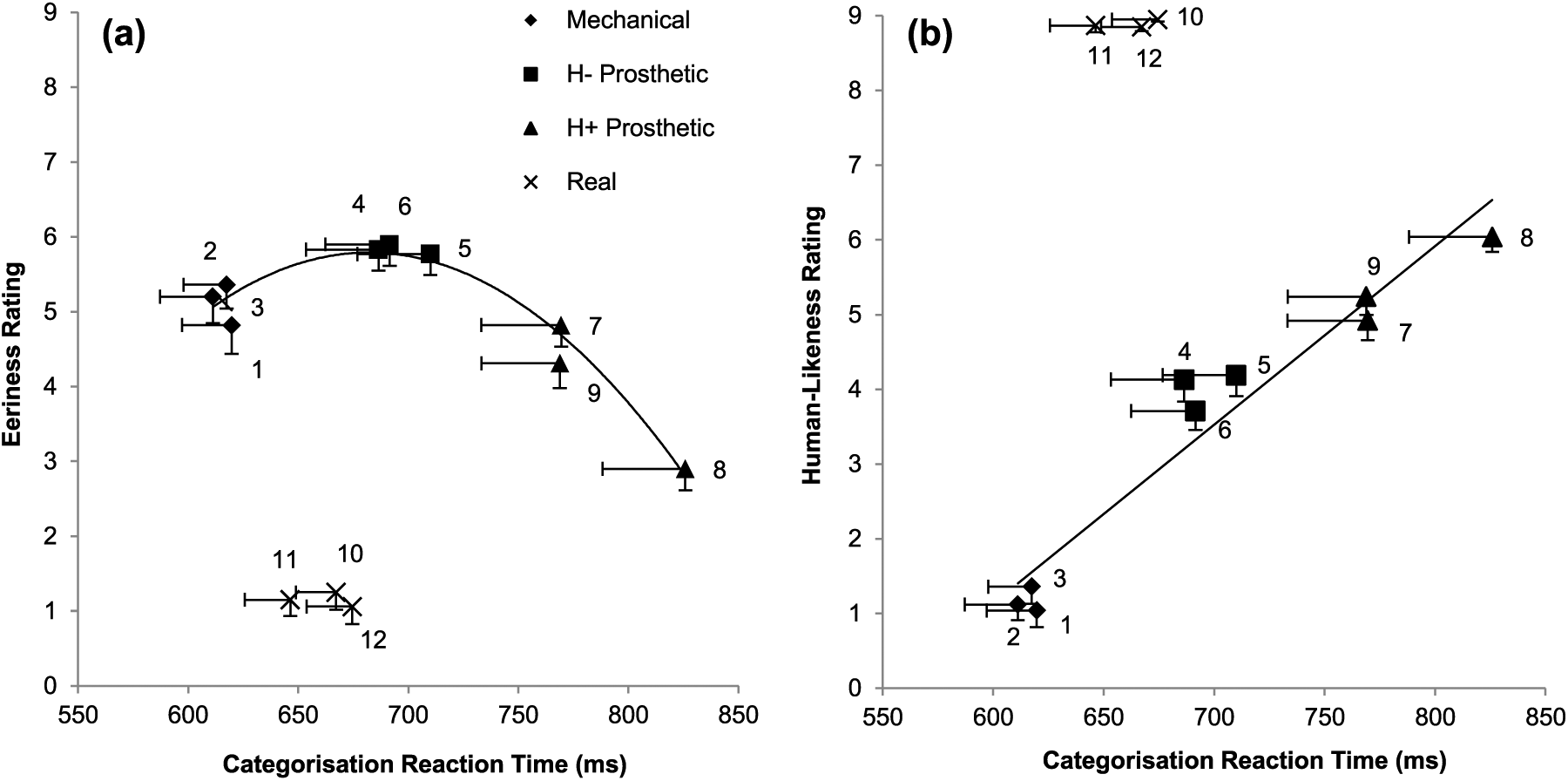
Mean (–SEM) eeriness ratings plotted against mean (–SEM) reaction time to categorise each individual hand image as human or artificial (ms) across the three artificial hand types and real human hands: (a) with the exception of the real hands, categorisation time shows a curvilinear relationship with eeriness ratings and (b) a linear relationship with human-likeness; the more human-like artificial hands are slower to categorise as human or artificial. The numbers refer to the images in Figure 1.
Discussion
Across two experiments, static images of less human-like prosthetic hands were consistently rated as eerie relative to more human-like prosthetic, real human and mechanical hands. This replicates previous findings, 5 with hand stimuli pre-selected for their level of human-likeness. We also extend this work by first demonstrating that ratings of eeriness (Experiment 1) were not influenced by orientation (first-person vs third-person), fitting with findings that higher level processing may be unaffected by perspective. 14 Second, we showed that eeriness could not be accounted for by categorical ambiguity (Experiment 2). Participants were slowest to categorise the H+ prosthetic hands as artificial versus human, and people were slower to categorise the more human-like hand exemplars. That people are slower to categorise more human-like artificial hands is unsurprising, but what is interesting is that this pattern contrasts with the ratings of eeriness. That is, the H+ prosthetic hands were slowest to categorise, but rated less eerie than the H– hands; indeed, hand 8 produced the slowest categorisation time, but the lowest eeriness rating. This indicates that categorical ambiguity cannot be driving the uncanny phenomenon for prosthetic hands. The categorisation hypothesis has received only limited support in the wider literature, and previous findings may have been driven by a dislike of image artefacts produced by morphing. 15 The current findings provide further evidence against this hypothesis, using a different type of stimulus, without the potentially complicating effects of facial expressions. Nevertheless, categorisation could still play a role, in that the H– hands which were rated as more eerie were more easily categorised as artificial. 15
The control (localisation) task (Experiment 2) indicated that speeded responses were slightly slower for the H– than the H+ prosthetic hands in general, which is likely to be due to a general slowing of responses to negative stimuli. This fits with a study which found that reaction times were slower for fish stimuli rated as more eerie. 12 An unexpected finding was that responses were significantly slower for the mechanical hands compared to all other stimuli. It is likely that this was generated by the additional task (finding the purple square) designed to ensure that participants attended to the detail of the image, as well as its location. Given the fine detail and coloured patches on the mechanical hands, this task may have disproportionately slowed responses for this category of hand.
The current findings show that prosthetic hands do evoke eeriness in the observer, which is generally consistent with the notion of the uncanny valley. However, rather than focussing on the valley, the evidence for which is scarce and problematic to obtain,15,16 it may be more appropriate to consider the underpinnings of the ‘uncanny phenomenon’ (feelings of uncanniness) 16 for prosthetic hands. A strong contender is the aforementioned perceptual mismatch hypothesis, which would suggest that key features such as unnatural skin colour or the absence of veins or fingernails may have driven the high eeriness ratings for the H– hands. Indeed, recent evidence showed that inconsistency in realism, rather than categorical ambiguity, produced uncanny responses to animal and human faces. 17 The dehumanisation hypothesis should also be explored; this posits that the uncanny phenomenon arises when an artificial entity which has previously been anthropomorphised is dehumanised. 16
Mori 1 originally suggested that prosthesis designers should avoid aiming for realism and opt for appealing materials such as wood. The fact that our more realistic prosthetic hands appeared less eerie than the less-realistic hands argues against this. 3 Nevertheless, future research should address limitations of the current work by exploring the role of movement and cutaneous input elicited by moving three-dimensional hands; indeed, Mori 1 hypothesised that movement would accentuate the uncanny valley 18 and that the feel of a prosthetic hand could be surprising and unsettling. 1 It is also possible that orientation could affect perceptions of eeriness if the hands were presented closer to the participant and/or as if the hand could be attached to the participant’s own body (peripersonal space). 18 Furthermore, the hand stimuli in this study were not matched for luminance, contrast and colour; colour in particular merits further investigation since it contributes to eeriness in artificial faces. 8 Finally, familiarity 19 with prosthetic hands and individual differences should be investigated; in this study, it is likely that some participants mistook the more human-like prosthetic hands for real hands.
Conclusion
Viewing static prosthetic hands that are less human-like generates a feeling of eeriness for the observer. This uncanny phenomenon was not related to difficulty in categorising the hands as human versus non-human and was not modulated by the orientation of the viewed hand. It is likely that inconsistent features in the less human-like hands played a role in generating the phenomenon.
Footnotes
Author contribution
SO and OC designed, carried out and wrote up the empirical work as part fulfillment of their undergraduate degrees, under the supervision of EP, who also drafted the manuscript. PK and EG contributed to the design, interpretation and write-up of the work.
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship and/or publication of this article.
Funding
The author(s) received no financial support for the research, authorship and/or publication of this article.