
Abstract
Background:
The need for information regarding running-specific prosthetic properties has previously been voiced. Such information is necessary to assist in athletes’ prostheses selection.
Objectives:
This study aimed to describe the characteristics of two commercially available running-specific prostheses.
Study design:
The running-specific prostheses were tested (in an experimental setup) without the external interference of athlete performance variations.
Methods:
Four stiffness categories of each running-specific prosthetic model (Xtend™ and Xtreme™) were tested at seven alignment setups and three drop masses (28, 38 and 48 kg). Results for peak ground reaction force (GRFpeak), contact time (tc), flight time (tf), reactive strength index (RSI) and maximal compression (ΔL) were determined during controlled dropping of running-specific prostheses onto a force platform with different masses attached to the experimental setup.
Results:
No statistically significant differences were found between the different setups of the running-specific prostheses. Statistically significant differences were found between the two models for all outcome variables (GRFpeak, Xtend > Xtreme; tc, Xtreme > Xtend; tf, Xtreme > Xtend; RSI, Xtend > Xtreme; ΔL, Xtreme > Xtend; p < 0.05).
Conclusion:
These findings suggest that the Xtreme stores more elastic energy than the Xtend, leading to a greater performance response. The specific responsive features of blades could guide sprint athletes in their choice of running-specific prostheses.
Clinical relevance
Insights into the running-specific prosthesis (RSP) properties and an understanding of its responsive characteristics have implications for athletes’ prosthetic choice. Physiologically and metabolically, a short sprint event (i.e. 100 m) places different demands on the athlete than a long sprint event (i.e. 400 m), and the RSP should match these performance demands.
Keywords
Background
Since 1992 the running-specific prosthesis (RSP) has been the prosthesis of choice in sprint athletes with lower limb amputations; 1 however, very little literature is available on the responsive features of the RSPs. The nature of this carbon fibre prosthetic foot is one of energy storage and return. Thus, it mimics the function of the lost limb it replaces, although there is still debate on how much function it replaces and in what manner. 2
In order to optimise an athlete’s performance and running comfort, it is essential to understand the physical and mechanical differences among RSPs. These characteristics have been investigated in walking prostheses, 3 but not in RSPs. The prescription and selection of RSPs by athletes are thus primarily based on their subjective perception of comfort and very little on scientific facts.
Various prosthetic legs are available for athletes with amputations. These RSPs essentially differ in terms of shape and stiffness. It has been found that variations in the stiffness of the prosthesis can be achieved by changing the composition of the carbon fibre without changing the shape. 2 This allows for athletes in different weight classes using the same prosthetic shape but different stiffnesses, in other words a heavier athlete will use a stiffer RSP. In sprinting, these differences could impact the performance indicators such as the ground reaction force (GRF) and stride frequency of an athlete. GRF is considered one of the major performance predictors in sprinting. 4 Stiffness and GRF are also known to be related and thus by changing the stiffness of an athlete’s RSP the performance of the athlete could potentially be affected. 5
To date most of the research with RSPs has been physiological in nature and focused on the athlete, with very little information available on the characteristics of the RSPs in isolation. It has been proposed that static loading could be used to test the stiffness characteristics of RSPs. 2 The test was found to be highly repeatable with the coefficient of variation ranging between 0.1% and 1.7%. However, with regards to the dynamic characteristics and more specifically characteristics pertaining to sprint performance, 6 no literature is available on the differences that may exist between two prostheses manufactured for different sprint distances. The 100- and 400-m sprints are physiologically and metabolically very different from one another, 7 and it is expected that the prostheses would be manufactured to address the key performance indicators of these two race distances.
The two prostheses used in this study have been specifically designed for different sprint distances. The Cheetah® Xtreme (Össur, Iceland) was designed for shorter sprints (100–200 m), whereas the Cheetah® Xtend (Össur, Iceland) was designed for longer distance sprints (⩾400 m). Therefore, it could be speculated that the Xtreme prosthesis would deliver greater GRFs as the peak running speeds in shorter sprints are greater than in longer sprints.
Research into the dynamic elastic response of RSPs has found that different stiffnesses of RSPs display different natural frequencies. 8 Also, by matching the frequency of muscle contribution to the natural frequency of the RSP, a trampoline effect is created with which the energy in the system is increased. 9 It has been hypothesised that this may assist bilateral amputees; 9 however, it may be more difficult for unilateral amputees to match the frequency of the RSP to the running frequency due to the asymmetry between the affected and unaffected legs.
Athletes with amputations will be better served if scientists have an understanding of the mechanical characteristics of RSPs. The aim of this study was therefore to assess how variations in stiffness and contact alignment of two types of RSPs influence the GRFs, contact time and flight time during drop testing.
Methods
Two different models, Cheetah Xtend (Össur) and Cheetah Xtreme (Össur), both commercially available RSPs, were tested (Figure 1). Four different stiffness categories of each of models were used (Table 1). The GRFs were measured when dropping these RSPs from a height of 30 cm onto a force platform, while two-dimensional video analyses, recording at 120 frames per second, were utilised to determine the vertical compression of the RSP. The RSPs were attached to a prosthetic socket made specifically for this testing setup. The socket–RSP attachment allows for variations in the plantarflexion angle, as well as the attachment height of the RSP on the socket. The RSP–socket complex was then attached to a rig and kept in an upright position while dropped onto a force platform. The RSPs were dropped with three different masses attached: 28, 38 and 48 kg. Selection of the 28-kg mass was based on the fact that the prosthetic socket mass was 8 kg, and the Olympic bar used with the rig had a mass of 20 kg. The maximal mass dropped was determined by the peak ground reaction force measured in an elite bilateral transtibial amputee sprinter (2653 N) during maximal speed running. 10 The peak ground reaction force in the 48-kg condition was similar or higher to that measured in this athlete. For each of these masses, seven alignment setups were used per RSP (baseline with two height and five angle variations). Each drop was repeated three times, adding up to a total of 63 drops per RSP.
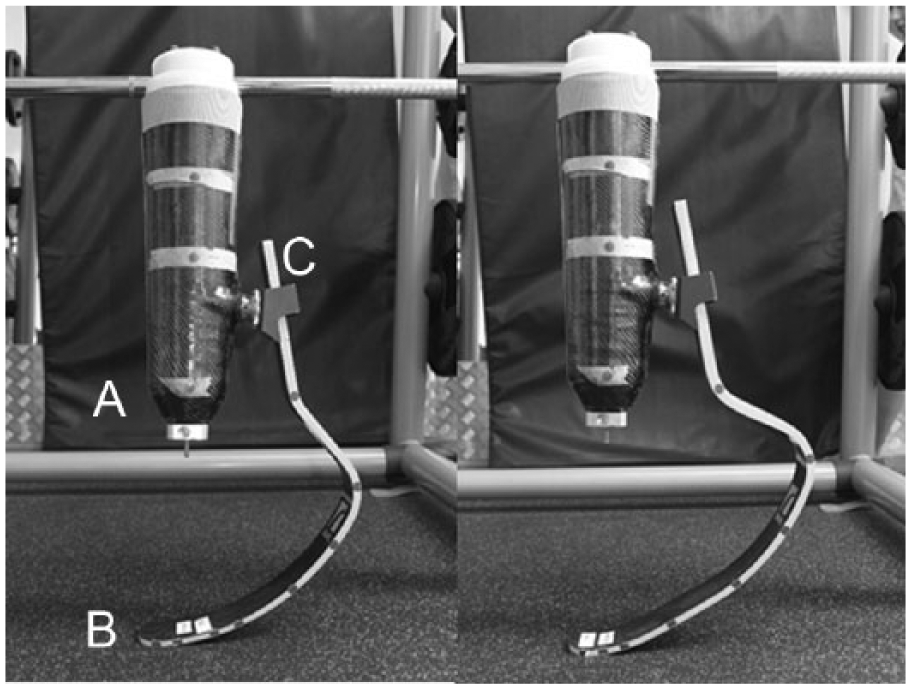
Figure showing the Cheetah Xtend (Össur) (left) and Cheetah Xtreme (Össur) (right). A indicates the marker on the socket from which the vertical compression is measured. B indicates the marker on the toe of the RSP to which the vertical compression is measured. C indicates the attachment of the RSP to the socket allowing for changes in prosthesis height and plantarflexion angle.
Stiffness categories used in this study and the patient weight scale for which each RSP is prescribed.
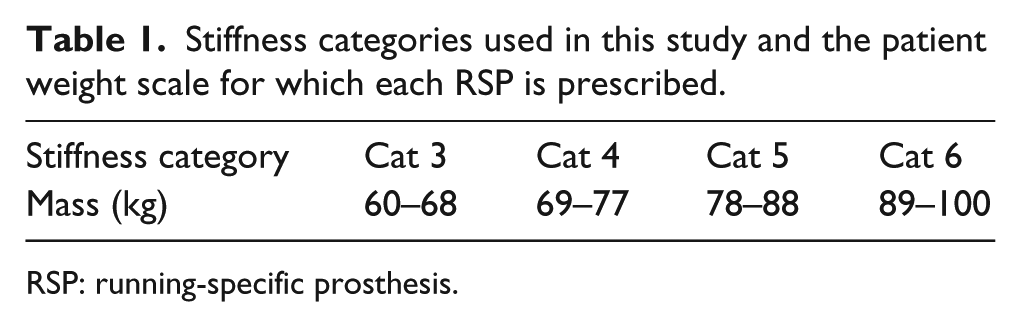
RSP: running-specific prosthesis.
RSP setup variations
Height
The length of the RSP was adapted by sliding the RSP up and down the attachment on the socket. The maximum height of the shorter RSP (Xtend) was used as the baseline (H0) height setup. The distance from the tip of the toe to the bottom of the socket in this baseline setup was replicated in the Xtreme (7 cm longer than Xtend), so that the baseline heights were similar for the two models. From here the RSP height was adjusted to three and 6 cm below the baseline (H3 and H6, respectively). All height testing was done at a 7° plantarflexion angle.
Plantarflexion angle
According to the manufacturer’s guidelines, the RSP should preferably be set at a 7° flexion angle in the sagittal plane as a starting point, with adjustments being made from this position to suit the athlete. Thus, a 7° flexion angle (A7) was used as the baseline set-up and the angle was increased and decreased by one and 2° for variation (A5, A6, A8 and A9). All these tests were completed at the baseline (H0) height.
Measurements
Force was measured with a force platform at a frequency of 2000 Hz (Route Industrial Automation, South Africa). The peak ground reaction force (GRFpeak) was calculated for the first drop of each trial. The contact time (tc) of the first drop, as well as the flight time (tf) after the initial hop were determined with a threshold force for the initiation of contact time being 40 N. Finally, the reactive strength index (RSI) 11 was determined by dividing tf by tc.
Two-dimensional video analyses in Kinovea 0.8.15 were completed to determine the maximal vertical compression (ΔL) of the RSP during the drops. Vertical compression was measured from the tip of the RSP to a fixed marker on the prosthetic socket. Video footage was captured with a Casio EX-FH 100 (Japan) high-speed camera at 120 frames per second.
The intraclass correlation for agreement between the three trials of each setup was calculated for the outcome variables in each setup (GRFpeak = 1.00; tc = 0.99; tf = 0.84; RSI = 0.90; ΔL = 0.95). Absolute and relative technical error of measurement (TEM) were calculated for the outcome variables (TEMabsolute: GRFpeak = 21.12 N; tc = 0.002 s; tf = 0.005 s; RSI = 0.03; ΔL = 0.37 cm; TEMrelative: GRFpeak = 0.90%; tc = 0.89%; tf = 1.37%; RSI = 1.83%; ΔL = 3.66%).
Statistics
The mean values of the three trials for each setup were used in further analysis. Analysis of variance (ANOVA) for repeated measures was used to test for differences between the two RSP models, the different categories of RSP and the alignment setups. The Fischer’s least significant difference test was used as post-hoc analysis. Statistical analysis was done using Statistica 12 (StatsSoft, USA). The significance level was set at p = 0.05.
Results
Trends between models and categories within the outcome variables were similar for all masses dropped; thus for simplicity only the 38-kg results will be discussed in detail.
Influence of different categories
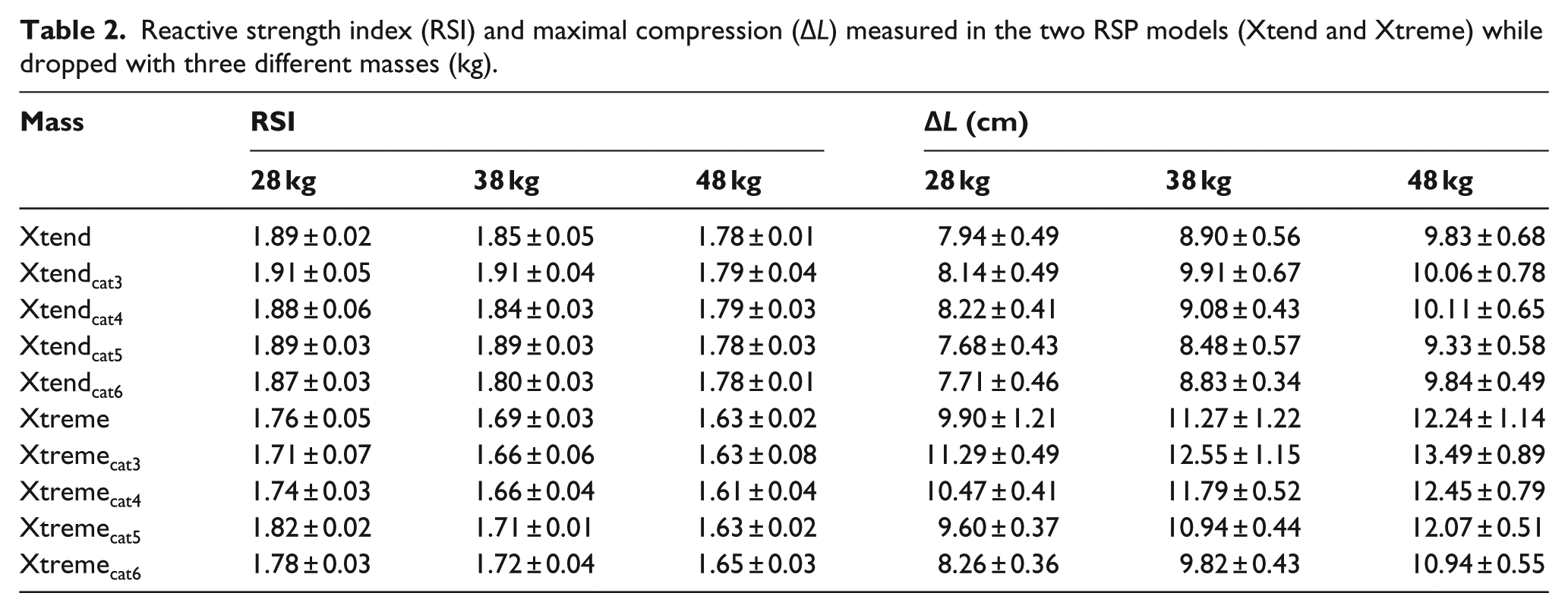
Statistically significant differences were found between the different categories in both models for tc (Xtendcat3 > Xtendcat4–6; Xtendcat4 > Xtendcat6; Xtremecat3 > Xtremecat4 > Xtremecat5 > Xtremecat6) (p < 0.05). Statistically significant differences were found among the categories in both models for all outcome variables at 38 kg. It was found that GRFpeak increased, tc decreased, tf decreased, and ΔL decreased with an increase in the stiffness category, whereas the RSI decreased in the Xtend and increased in the Xtreme with an increase in the stiffness category. There were no interaction effects between the model and category RSP, and the mass dropped, for GRFpeak (Figure 2), tf (Figure 4), RSI (Table 2) and ΔL (Table 2) (p > 0.05).
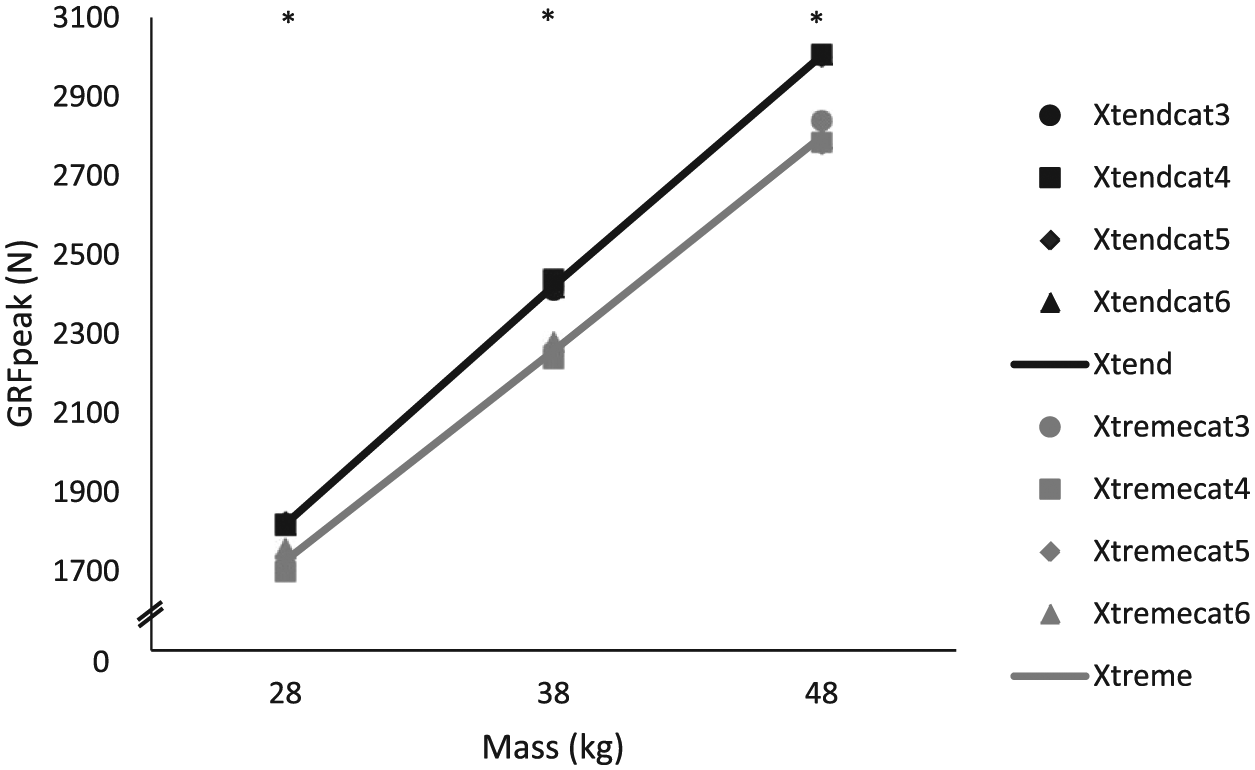
Mean ± SD and ground reaction force peak (GRFpeak) (N) of the RSP models (Xtend and Xtreme), as well as the categories of each model, using three different masses (kg).
Reactive strength index (RSI) and maximal compression (ΔL) measured in the two RSP models (Xtend and Xtreme) while dropped with three different masses (kg).
Influence of RSP setup
The analysis of the interaction between the model and set-up of the RSP, and the mass dropped with the RSP revealed no statistically significant differences between the different setups for any of the outcome variables in either model (p > 0.05).
Model differences
There was a statistically significant interaction effect for GRFpeak between the two RSP models and the different drop weights, (Xtend > Xtreme) (Figure 2). Similarly, a significant difference was found between Xtend and Xtreme with regards to the ΔL (Table 2) and tc (Figure 3) (p < 0.05). No statistically significant differences were observed for tf (Figure 4) and RSI (Table 2) between the Xtend and Xtreme (p > 0.05).
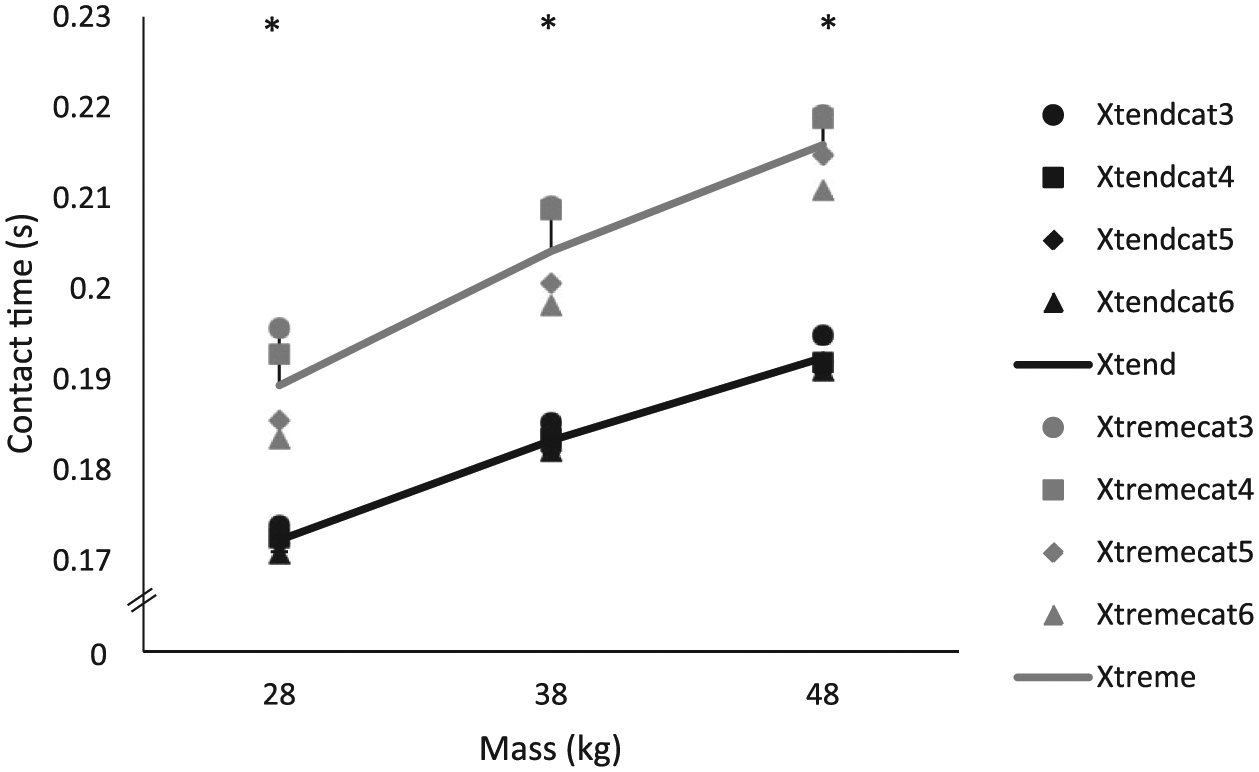
Mean ± SD and ground contact time (s) measured in the two RSP models (Xtend and Xtreme), as well as the categories of each model, using three different masses (kg).
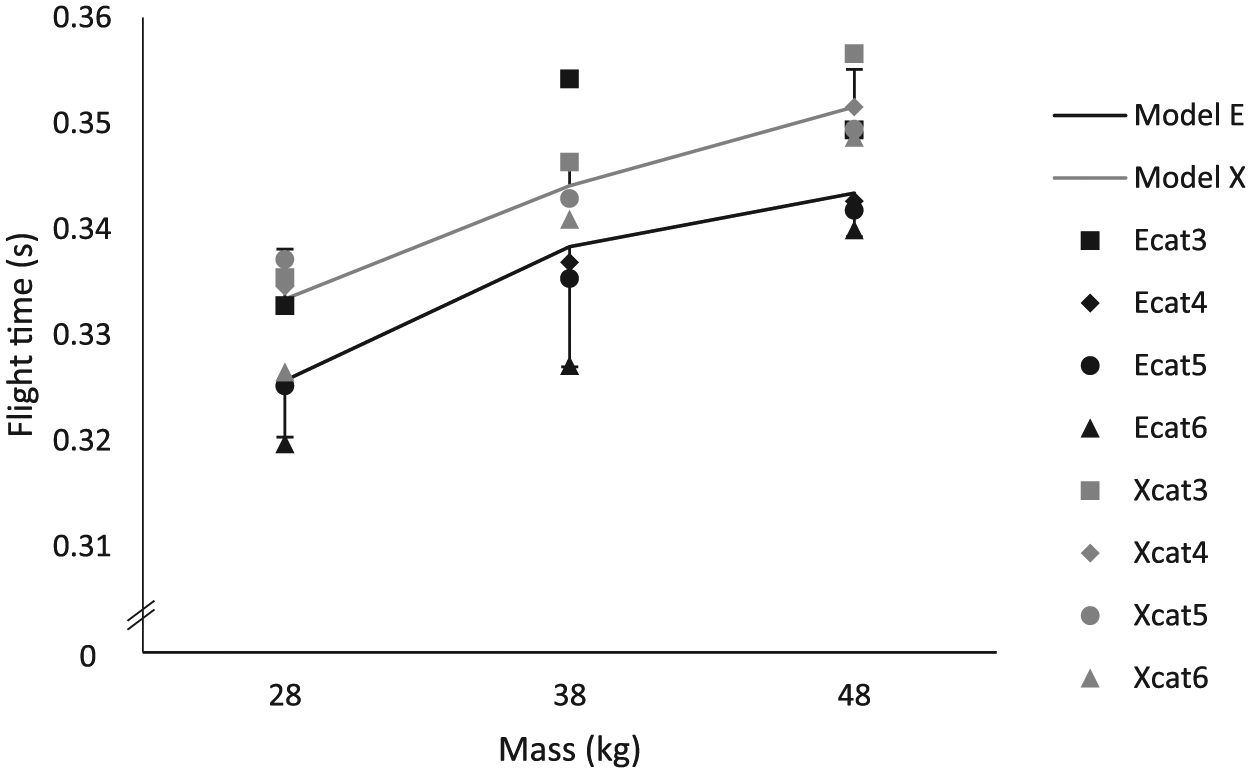
Mean ± SD and flight time (s) measured in the two RSP models (Xtend and Xtreme), as well as the categories for each model, using three different masses (kg).
Discussion
This study set out to determine the differences between two models of RSP commonly used in sprint running. This was motivated by the scarcity of objective information with regards to the properties of the RSPs without the variance caused by each individual athlete. It has previously been suggested that there is a need for mechanical testing of prostheses as a means to objectively analyse the differences between prosthetic feet 12 and though this was directed at walking prostheses, the same holds true for running prostheses. The results of this study indicated that there is a significant difference in the peak ground reaction force (GRFpeak), contact time (tc), and compression (ΔL) between the two tested models. To the authors’ knowledge, no study has previously been published where these characteristics of RSPs were measured and compared.
The variables measured in this study are frequently found in biomechanical studies on sprint running. In these studies, it has been found that GRF increases with running speed. 13 The relationship between the maximal vertical compression of a leg and the peak ground reaction force is the stiffness of this leg. 14 It therefore defines how much a leg withstands deformation and is related to contact time, flight time and stride length. 15 This ultimately influences the rate of force development which has been found to be an important performance predictor in sprint running.13,16 Guided by this knowledge it was decided to determine the GRF with the different RSPs as this would indicate the force transfer differences, as well as the compression, which in conjunction with the GRFpeak would indicate the stiffness of the RSPs. Finally, the contact time and flight time were used to determine the RSI, which is used in able-bodied athletes as a performance predictor. 11
In order to simulate different body masses of athletes, three different masses were attached to the experimental setup. No statistically significant interaction effect was found between the model of RSP, the mass dropped and the setup of the RSP. This finding suggests that the attachment angle and height does not affect the way in which the prostheses react to the applied load. Therefore, the RSP setup is only dependent on the athlete’s personal preference and comfort, since the properties of the RSP are not influenced by setup changes. However, this does not mean that different setups may not affect the performance of the athlete, as varying results have been found on the kinematics and kinetics during walking 17 with changes in the centre of mass. Furthermore, the athlete’s ability to adapt to changes in the RSP setup may influence their performance outcomes. However, the results of this study do not allow for predictions on the possible influence that different setups will have on an athlete’s running performance.
Significant differences in the different categories were found for the different variables with the 38-kg drops. The RSP stiffness categories are specified by the manufacturers as a means of accounting for variations in athletes’ body mass. Therefore, the greater the body mass of the athlete, the greater the stiffness of the RSP in order to prevent excessive compression leading to prolonged contact times while running. This is evident in the data, as both tc and ΔL decreased with an increase in the stiffness category. The compression of the RSP acts similar to a spring and decreases the impact by allowing for compression of the RSP. Thus, less compression leads to shorter contact time.
The GRFpeak results showed that the stiffer the RSP the greater the force transfer to the ground. In this case, the stiffer the RSP, the greater the GRFpeak. However, the storage of elastic potential energy in the softer RSPs did not result in greater jump heights (tf) in the softer prosthesis compared to the stiffer prosthesis. This indicates that the elastic energy stored compensates for the decreased GRFpeak. In literature comparing amputee sprinters with able-bodied sprinters, the major limiting factor in amputee performance is stated to be the inability to produce high GRF; 18 however, these results may question whether the elastic component of the RSP will not compensate for the decreased GRF.
The Xtend also had a significantly shorter ground contact time in comparison with the Xtreme. Shorter contact time has been found to have a moderate correlation to higher running speed; 13 however, in biological limbs, there is a minimum contact time reached in order to optimise the force production by the muscles during ground contact. 16 Thus, it was expected that the Xtreme would display the shorter ground contact time, as the elastic response of an athlete is an important factor in the maximal speed phase of the sprint 11 and it was therefore expected that the shorter distance RSP would mimic this. The prolonged contact time in the Xtreme might be brought about by the greater compression (ΔL) found in comparison with the Xtend, thus the RSP compresses to a greater extent and therefore lengthens the contact time.
The experimental setup in this study was similar to that of drop jumps in athletes. Therefore, the flight time is seen as a performance variable by indirectly indicating the jump height. Given the difference in the GRFpeak between the models, it was expected that the Xtend would display longer flight times than the Xtreme. However, there was no statistically significant difference in flight time between the models. It was concluded that the greater compression in the Xtreme stores more elastic energy during the braking phase of the impact. During the propulsion phase of ground contact, this elastic energy is then released, leading to the extended flight time as measured in this RSP. In previous research, it was found that the spring efficiency of energy storage and return in walking prosthetic feet (Seattle foot: 52%, Flex foot: 84%) was greater than that of rigid walking prosthetic feet (solid ankle cushion heel (SACH): 31%). 19 Thus, similar to these walking prosthetic feet, there may be a difference in the spring efficiency of these two RSP models. It was observed that the stiffness of the prostheses is dependent on the posterior curvature of the RSP, where the greater the curvature, the less stiff the RSP will be. 20 In this study, the Xtreme had a more pronounced posterior curvature which could be the cause of the dissimilar characteristics of the prostheses.
In this study, the RSP was dropped vertically, meaning that the contact point and take-off point are the same due to the nature of the drop. However, this is not similar during running where the athlete rolls over the RSP during the contact phase of running and could potentially lead to discrepancies in the results found. In this study, however, the aim was to compare two RSP models in order to gain more insight into the responsive nature of these blades. Future work should be aimed at testing the RSPs under these rollover conditions.
The prostheses used in this study were chosen for their specificity to sprint running. The Xtreme is specifically designed for short sprints, such as the 100 and 200 m, whereas the Xtend is designed for longer sprints (⩾400 m). Running speed is greatly influenced by the GRFs produced by the athlete. 13 In research on athletes with lower limb amputations, it has been established that these athletes produce lower GRFs in comparison with able-bodied athletes,21,22 as well as lower GRFs in their sound limb in the case of unilateral amputees.18,22–24 The results of this study suggest that the model of prosthesis (Xtend or Xtreme) has a significant effect on the vertical GRF when bouncing the prosthesis. In this case, the use of the longer distance prosthesis Xtend resulted in greater vertical GRFs in comparison with the shorter distance prosthesis Xtreme. This finding is in contrast to what would intuitively be expected, namely, the prostheses for a short sprint would produce greater vertical GRFs than prostheses for a long sprint. However, it has previously been found that the GRF is lower in more compliant walking prosthetic feet in comparison with the traditional rigid prosthetic feet. 25 Although this testing was completed with walking prostheses, it can be assumed that the same principle of material properties applies to RSPs.
The question then is why an athlete would decide to use these prostheses for the distances that they are specifically designed for. Perhaps, the answer relates to the different phases of each race. The 100-m sprint can be divided into three main phases, namely, the acceleration phase (0 to ~60 m), the speed maintenance/maximal velocity phase (60–80 m) and the deceleration phase (80–100 m). 26 Thus, the largest proportion (60%) of the 100 m sprint is spent in the acceleration phase. 26 Although a 400-m race has the same three main phases, the acceleration phase lasts about 25% of the race (0 to ~100 m). 27 A significantly larger proportion of a 400-m sprint is spent in the speed maintenance phase (50%), 27 compared to the 20% in the 100 m (20%). 26 This may therefore explain why the Xtend is prescribed for longer distance sprints and the Xtreme for shorter distances. The positive relationship between contact time and economy 28 would indicate that the Xtend could be better suited for the 400-m sprint, whereas the need for prolonged impulse generation for acceleration and therefore extended contact times could potentially indicate the suitability of the Xtreme for the 100-m sprint.
Due to safety reasons, the mass dropped with each of the prostheses was limited to a maximum of 48 kg. However, the mass dropped from a height of 30 cm caused the GRF to be similar to that of an elite bilateral transtibial amputee sprinter. 10 Furthermore, due to the rig design, the angle of force application could not be changed in order to more accurately mimic an athlete’s running gait. Future research should aim at determining the influence of force application angles on the compressive nature of the RSPs as well as the performance-related variables (contact time and flight time).
Conclusion
It was concluded from the results that there were differences between the two tested RSP models; however, variations in the setup of the RSP had minimal influence on the performance of the prosthesis. Therefore, from a practical point of view, setting up the RSP to the athlete’s comfort will not influence the performance of the prosthesis. The findings indicate that the two models of prosthesis used in this study do significantly differ from each other, and that more research is needed to further the knowledge of the different RSPs available in order to assist athletes and coaches in determining the optimal RSP for the athletes’ demands.
Footnotes
Author contribution
All authors contributed equally in the preparation of this manuscript.
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship and/or publication of this article: This study was supported by the South African Agency for Science and Technology Advancement (10.13039/501100006312).