
Abstract
Background:
We aimed to determine if a shock absorbing pylon (SAP) influenced the ground reaction force characteristics and the shock absorbing mechanisms compared to a rigid pylon (Rigid) during the loading phase in running.
Objectives:
To determine if the SAP influences the mechanisms of loading compared to the Rigid condition.
Study Design:
A convenience sample of transtibial amputees participated in a laboratory-based study. The prosthetic set-up was randomly altered fd\sdsd.
Methods:
Five recreationally active male transtibial amputees age: 18–50 years; mean mass: 86.7 ± 17.5 kg; height: 1.77 ± 0.07 m) volunteered from a population-based sample. They completed a within-participant-designed study assessing a SAP and a Rigid condition during running. Kinematic and kinetic data were collected during two sessions following a one-week customization period.
Results:
Loading rate, peak vertical and horizontal ground reaction forces and the time to each measure along with knee and hip angular displacement, absorbing powers and work done between the SAP and Rigid conditions were not systematically affected by the prosthetic condition.
Conclusions:
The effect of the SAP was minimal and inconsistent in the loading phase, with only some amputees presenting higher and others with lower values for the tested variables.
Clinical relevance
The inclusion of a prosthetic shock absorber in the form of a SAP did not systematically alter the kinetic characteristics or shock absorbing mechanisms of the residual joints. It appears that the prescription of a SAP is not justified for these recreationally active amputees.
Background
Participation in exercise has been shown to have physiological, psychological and mechanical benefits.1,2 Running is a fundamental exercise which enhances many aspects associated with health. During the running gait cycle, initial loading of the limb occurs in the early part of the support phase as a result of the foot’s collision with the ground at footstrike. Throughout this loading, the body’s momentum is altered and the impact forces are cushioned through eccentrically controlled joint flexion. 3 The absorption of the impact forces is achieved by increasing the time interval over which the body’s momentum is altered which should result in the reduction of the magnitudes of the peak forces. Overuse injuries have been associated with the repetitive impact forces experienced when running. Footwear and shock-absorbing foot orthoses have been shown to alter the loading forces.4,5 The magnitude, direction and rate of the repetitive loading has also been shown to be related to the aetiology and progression of certain pathological conditions, particularly joint degeneration and lower back pain. 6 For transtibial amputees, the skin discomfort and possible pain at the residual limb-socket interface as a result of the high impact forces of short duration associated with running, can result in a reticence to participate in exercise.7,8
The touchdown velocity, the landing properties of the foot-ground interface along with the initial footstrike angles of the knee and ankle can alter the magnitude of the impact peak within the first 50 ms of ground contact. 9 Landing with a plantarflexed ankle and knee flexion is seen as a mechanism to reduce the impact peaks and increase the time to peak force. 10 Transtibial amputees have a compromised capacity to attenuate these impact forces experienced during running due to the mechanical limitations of the prosthetic ankle and the altered knee mechanisms. In particular, prosthetic limb has been shown to be in an exaggerated upright position to ensure stability at the more extended knee.11,12
Shock absorbing pylons (SAP) have been developed to aid in the absorption of impact forces and may enhance the potential for exercise participation. Theoretically, these devices dampen the amplitude of the force through a spring-mass damping system. Deformation of the spring over a limited distance attenuates the force by prolonging the impact. Research on walking has indicated that these devices have little effect on the biomechanics of self-selected walking gait13,14 and no effect on the daily activity levels (evidenced by step count) or the activity duration over seven days for transtibial amputees. 15 However, it may be possible that the SAP device is more effective in dynamic movements where the shock absorbency and weight transference is greater than in walking.
There is limited research examining the efficacy of the SAP during dynamic movements such as running. The function of the SAP is to replace the shock-absorbing mechanisms of the foot and ankle and to facilitate in the attenuation of repetitive, impact forces during the loading phase. As a consequence it is anticipated that the residual limb proximal to the SAP would have different shock attenuation characteristics and neuromuscular control mechanisms particularly during the eccentric soft tissue control of the loading phase during running.
Therefore, the aim of the study was to assess the effectiveness of the SAP device on the loading characteristics of transtibial amputees during running gait. Specifically, the initial loading rate along with the magnitude of, and duration to, the vertical and braking ground reaction force (GRF) peaks over the loading phase were examined, together with the joint angles, negative powers and work done at the knee and hip.
Methods
Five physically active male unilateral transtibial amputees participated in the study (age: 18–50 years; mean mass: 86.7 ± 17.5 kg; height: 1.77 ± 0.07 m). They were at least one year post-operative and free from secondary musculoskeletal injuries, illness or limitations. They were independent walkers and able to run at least 1 km. Prior to data collection, all participants underwent a familiarization session and gave written informed consent that had been approved by the University of Roehampton Ethics Committee.
The data were collected in two sessions, one week apart under two different conditions. The condition that altered between the two sessions was the absorbency of the prosthetic pylon. The prosthetic prescription consisted of the participant’s patellar-bearing socket, Elite VT feet and a SAP or Rigid pylon (Blatchford Telescopic Torsion Pro Pylon, Endolite, UK) with their own athletic footwear. Each prosthetic prescription was fit and aligned by a qualified prosthestist. The SAP was modified by the prosthetists (not involved in the data collection or analysis) to be suitable for the amputee’s mass and activity level according to the manufacturer’s recommendation. The pylon was covered to conceal the condition from both the participant and the researcher. Following a seven-day accommodation period to the prosthetic components, during which the participant was advised to wear the prosthesis during waking hours and to engage in activities as usual, running data were collected using a Kistler force platform (model 9581C, sampling at 1080 Hz) synchronized with a nine-camera infrared motion analysis system (ViconTM, Oxford UK, model 612, sampling at 120 Hz). Thirty-four reflective markers were placed at predefined anatomical landmarks to create a full body model 16 in accordance with the Vicon system (ViconTM, Oxford, PluginGait). The tibial marker was always placed below the location of the active or dummy of the pylon.
Following the participant’s 10-minute warm-up routine they performed five successful running trials down a 20m runway at a controlled horizontal velocity of 4 m·s−1. This was monitored using two infrared beam sensors placed at a 1-m interval before and after the force platform. Participants completed the run at their own self-selected cadence and a successful trial required an untargeted, complete foot contact with the force platform within ± 5 % of the required running speed. After data collection, the pylon was changed to the alternative condition and the participant was given a week to adjust to their altered pylon after which the data collection was repeated. All prosthetic components were held constant throughout the study except for the prosthetic pylon.
Data Analysis
Sagittal plane kinematic data trajectories were filtered using Woltring’s quintic spline routine 17 with a predicted mean square error of 15 mm2. The mean and standard deviation of five running trials in each condition was calculated for each participant.
The variables of interest were determined at initial contact, over the initial loading period and over the loading phase. Initial contact (IC, time = 0.00 s), was defined as the instant when the vertical GRF rose above 10 N. The loading phase was defined from IC to the point when the centre of mass reached its minimum vertical displacement. The initial loading rate was defined as the rate of change of vertical force in the first 50 ms of ground contact. Joint powers were calculated using standard inverse dynamics 18 and work done at the joint was determined from the integral of the joint power. Although there are limitations with the inverse dynamics approach with prosthetic limbs, Dumas et al. 19 found that the approach had only a small effect on the calculated moments and forces.
A single-subject within group analysis, where each participant acted as their own control, was conducted. A difference between the two conditions was defined as the mean values for both conditions being more than 1 standard deviation (SD) outside each other. This definition was chosen to account for the inherent variability evident in each condition when running.
Results
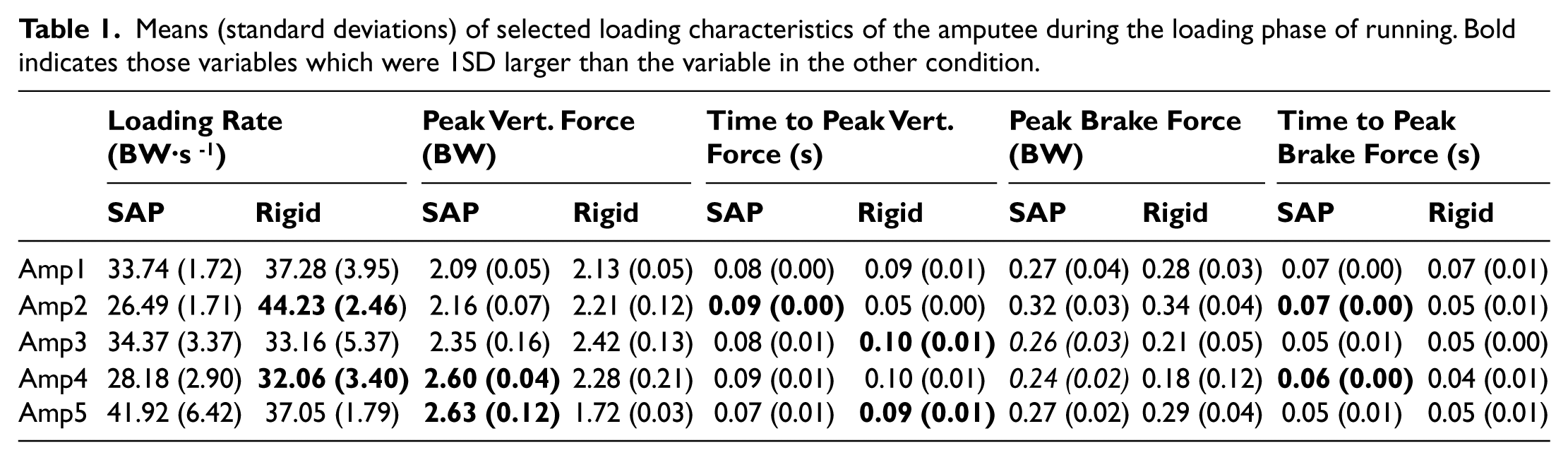
All the amputees contacted the floor with the heel and the step length prior to prosthetic side contact with the force platform did not change between conditions. There was no clear difference in the initial loading rate or the magnitude of the peak force between the two conditions, though it was higher for two amputees in the rigid condition (Table 1). There is some evidence to support the role of the SAP in this initial phase, while the SAP is engaging. The average deformation of the SAP was 11 mm, though it ranged from 5 mm for Amputee (Amp) 3 to 13 mm for Amp 1 and Amp 4. This large range of compression indicates variability in the settings for the prostheses and may have influenced the results. The peak compression was reached halfway through the loading phase for Amp 1, 2, 4 and was less than this for Amp 3 (22%) and 5 (36%). To assess if the SAP affected the entire loading phase, the peak force in this phase was assessed. Here, two amputees experienced a higher peak force in the SAP (Table 1). This peak force was experienced after the SAP has compressed. Further, the time to peak force was not different between the two conditions, though for some amputees it took longer to reach the peak force in the SAP condition. As running also loads in the horizontal braking direction this variable was also assessed. Again, there was no clear difference in the magnitude of the peak force in braking, though this was inclined to occur a little later for the SAP condition compared to the Rigid condition for two amputees.
Means (standard deviations) of selected loading characteristics of the amputee during the loading phase of running. Bold indicates those variables which were 1SD larger than the variable in the other condition.
Examining the joint motion (Figure 1) reveals no difference at the knee or hip at initial contact or in the knee range of motion between the two conditions. At the hip there was a slight trend to an increased range of motion in the SAP, with Amp 3 illustrating a greater range of motion in this condition.
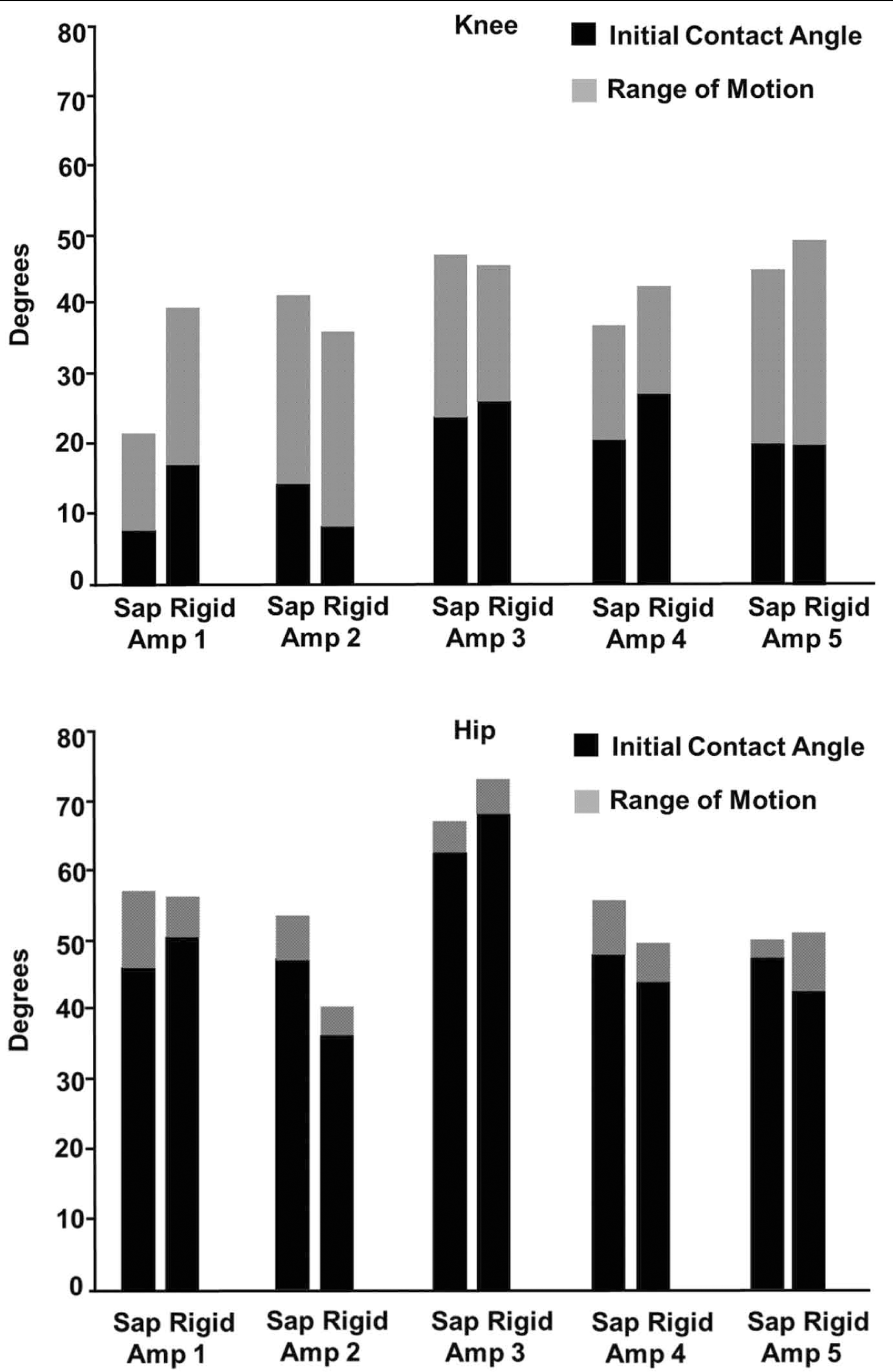
Mean knee and hip joint angles at initial contact and the range of motion of the amputee (Amp) during the loading phase of running. The group mean (standard deviation) for each measure displayed to the right of the amputees.
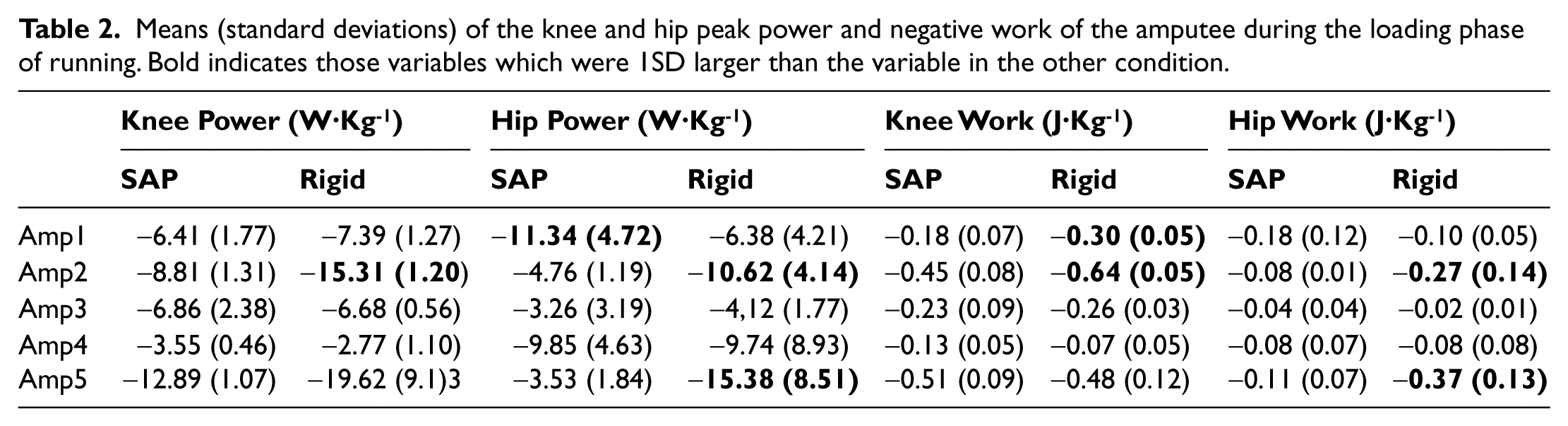
Peak eccentric power represents the maximum eccentric contraction by the joint extensors to control the lowering of the centre of mass in the loading phase of running while the work done represents the absorption over the loading phase. The peak eccentric power showed no difference at the knee and hip except for Amp 2 who had a higher peak power in the rigid condition. For the negative work done by the joints to control the lowering of the centre of mass in the loading phase, again there was no difference. Greater work was done at the knee than the hip (Table 2).
Means (standard deviations) of the knee and hip peak power and negative work of the amputee during the loading phase of running. Bold indicates those variables which were 1SD larger than the variable in the other condition.
Discussion
The purpose of the study was to examine the role of the SAP in altering the loading mechanics when running. The proposed role of these pylons was to attenuate the forces which the body experiences during dynamic movements in the absence of the anatomical ankle. The effectiveness of the pylon can be determined by analyzing the GRF experienced by the body and the nature of the natural shock absorbing mechanisms of the stance limb running gait, particularly during the loading phase.
The results suggest that the SAP had a marginal effect on the initial loading rate and the GRF characteristics over the whole of the loading phase compared to the Rigid condition (Table 1) since there was no consistent change in the biomechanical measures between the two conditions. The peak vertical and braking GRF were similar to values previously reported for both able-bodied 20 and amputee runners. 21 The time to peak force was similar for both conditions. Since one of the theoretical functions of the SAP is to reduce the peak force by increasing the time, the SAP was not consistently effective in this role for these participants running at a horizontal velocity of 4.0 m·s−1. Given the nature of the loading and the extent and timing of the compression of the spring in the SAP, it suggests that the properties of the spring are not effective at these loading rates.
Previous research has shown that the ankle and knee absorb power in the first half of stance. The ankle power absorption has been shown to range from 1.07 to 7.77 W·kg−1 for running speeds between 3.35 and 5.02 m·s−1, indicating the joint’s role during absorption in the loading phase, although the knee is the predominant energy absorber. 20 Since the SAP aimed to replace the role of the ankle, it was anticipated that the SAP would alter the knee mechanics. The knee flexion excursion was smaller (Figure 1) than previously reported for able-bodied running which is consistent with previous literature on amputee running. 21 Transtibial amputees are inclined to maintain a more extended knee to ensure stability given the reduced strength of the knee muscles to control the loading at the joint. 21 Reduced impact magnitudes and durations onto the prosthetic limb during walking, running and sprinting11,12,22 may also be indicative of a protective strategy due to residual limb pain or the limb’s unsuitability for load-bearing. 23 Derrick 10 suggests that runners run with an extended knee at initial ground contact but that this angle becomes more flexed in certain conditions to decrease injury potential to reduce the impact severity. The SAP did not alter the initial contact angle or the magnitude of the knee flexion in the loading phase and this, together with the GRF characteristics, suggests that the SAP does not influence the initial loading consistently. This contradicts the findings in controlled speed walking where the participants using the SAP increased their knee flexion. 13
The knee eccentric power was reduced for only one amputee and the work done (Table 2) was reduced for two amputees when wearing the SAP. The peak eccentric power at the knee was larger compared to previous research in amputee sprinting, 11 but smaller compared to able-bodied running at similar speeds.20,24 Previous research on amputee running and sprinting has not reported the work done at the joints in absorbing the load and our research indicates that less work was done at the knee compared to able-bodied runners at similar speeds, 20 highlighting the compromised function of the knee in running.
As the amputee is missing a key shock-absorber at the ankle and as the function of the knee is compromised, the role of the hip in loading was also determined to assess if it assumed a compensatory role. In able-bodied running, the hip is flexed at initial contact and displays a net power absorption pattern in the loading phase which controls the hip flexion. The hip then extends to enable propulsion for both able-bodied runners 6 and amputees. 21
No amputees changed the hip angle at touchdown and some hip range of motion was evident in both conditions, indicating that hip flexion is a consistent feature for both conditions and this was not changed by the condition. The hip eccentric power did not show a clear pattern to indicate that the role of the SAP had a consistent effect on the absorbing mechanism developed by this joint. The peak power absorbed at the joint was reduced compared to previous research in amputee sprinting. 11 For two amputees, the negative work done at the hip was reduced in the SAP (Table 2). There was generally a higher proportion of work done at the knee than at the hip, indicating the importance of the knee over the hip in shock absorbing in running, which is consistent with able-bodied running 20 and sprinting. 25
The results of this study suggest that the introduction of a mechanical absorbing mechanism had little consistent effect on the force attenuation mechanisms for the transtibial amputees when running at this speed. There was only one amputee (Amp 2) for whom the SAP seemed to affect the most, by reducing the initial loading rate, increasing the time to peak force and reducing the power and work done at the knee and hip. For no amputee, the results were better in the Rigid condition. The findings from our study are very similar to those reported in the literature for specialized running prostheses, and these results together are quite different from able-bodied running mechanisms. This suggests that any prosthesis is insufficient to compensate for the loss of the ankle joints anatomical structure. Further research is required to develop the prosthetic-participant mechanisms to maximize the capacity to run within the inherent pathomechanics.
A relatively small number of participants were assessed in this study for a single running gait velocity. Although this is the first research to assess the use of different prosthetic conditions in running, further research is required which examines the loading mechanisms in response to a wider range of running speeds and over a longer use period. It is possible that long-term use may result in alterations to the loading mechanism which are not evident with only a short period of accommodation to the altered condition.
Conclusion
The data presented reflect the mechanisms used to load the limb in stance phase of running. The suggested role of a shock absorbing pylon is to enhance the load bearing capacity of the prosthetic side and to attenuate the shock experienced through that limb. The initial loading rate, the peak force and the time to peak force in the vertical and horizontal directions were not consistently altered by the SAP suggesting that the pylon is not effective in attenuating the load in running. The results indicate that the SAP had limited effect on the mechanics of loading the limb for the amputees when running at a horizontal speed of 4.0 m·s−1.
Therefore, it is unlikely that the SAP will contribute substantially to reducing the likelihood of amputees experiencing both the shock-related injuries that are common in runners and residual limb discomfort. Further work is needed to determine the effectiveness of the SAP and whether its prescription useful for recreationally active amputees.
Footnotes
Funding
This research received no specific grant from any funding agency in the public, commercial, or not-for-profit sectors.
Conflict of interest
Chas A Blatchford and Sons supplied the componentry for the research. They had no involvement in the analysis or presentation of the data.