
Abstract
Background: The addition of a passive wrist to a single degree of freedom prosthesis has an effect on its functionality. The amount of impact is undetermined.
Objectives: To measure the grasping function of a commercial single degree of freedom hands with and without two forms of passive wrist flexor.
Study Design: Form-board and timed tasks.
Method: Repeated measures with a single subject using a validated assessment tool. The test measured the function of one conventional, single axis, powered hand controlled by the same myocontroller format. It was used in conjunction with a passive three position wrist flexor, a wrist with compliance in the flex/extend and radial/ulnar deviation and compared with a hand without these axes.
Results: The overall functional score of the hand alone was 80 out of 100. The use of a wrist flexion unit resulted in a higher score (83) and the compliant wrist achieved a score of 79. The addition of a wrist allowed improved performance in Power, Lateral and Tips grips for both wrist designs, in addition the Extension grip was improved with the compliant wrist.
Conclusion: Wrist flexion had a positive impact on the functional score. It enabled some tasks to be performed quicker and with less difficulty.
The majority of prosthetic hands have pro/supination yet there is little evidence about what impact this, or any other motion at the wrist, has on the overall functional capabilities of a prosthetic hand (i.e. grip). A commercial myoelectric prosthetic hand when used with and without two different wrist designs can potentially improve grip performance.
Introduction
This study was part of a programme to investigate the function of prosthetic arm systems. 1 It aims to assist in the decision-making process of the clinicians when prescribing one of the newer, more advanced prosthetic hand systems, by providing objective information concerning the functional capabilities of the components and systems. The earlier part of the study concerned single degree of freedom myoelectric hands and their controllers; this current study uses a similar type of hand with different unpowered wrist joints.
Previously, any wrist function for a prosthesis was limited, and tended to be passive pro/supination. 2 While this axis is usually one of the natural forearm, it is generally included as the role of a prosthetic wrist. No rationale has been put forward by manufacturers as to why this axis was chosen over flexion/extension or radial/ulnar deviation. It is probable that it was for pragmatic reasons, being the simplest and most robust to build and use. Wearers can mostly overcome the lack of any wrist motion through greater use of the shoulder and trunk, 3 but the increases in range and force needed have been associated with overuse injuries. 4 As a result it is important to determine if additional degrees of freedom at the wrist might change or reduce the compensatory motions, increase the functionality of the hand/wrist, or make the prosthesis easier to use.3,5,6 This study focuses on one aspect and measures the impact on function of unpowered wrist flexion. The function of prosthetic hands was measured using the Southampton Hand Assessment Procedure (SHAP). 7
Background to SHAP
SHAP was designed to assess the function of the hand and uses a form-board and self-timed tasks. The test was designed to be practical, supplying the tester with a numerical score that allows comparison between subjects, over time and between levels of recovery. 8 It has been shown to have repeatability on normal subjects and some conditions of the hand and used for prosthetic hand assessment.1,8-12
The tasks were divided into two sections: abstract objects, to encourage the use of the six standard grips: Tips, Lateral, Tripod, Spherical, Power and Extension, and 12 simulated activities of daily living (ADLs). 13 Each of the grips is given a score based on the difference in time to execute compared to times recorded by a normal group (score of 100), the lower the score the poorer the performance. The overall score is derived from the individual grip scores with a weighting given to each grasp depending on their relative use in daily activities. 14 A healthy hand score is greater than 97. Reduction in score is proportional to lower levels of function.
The smallest real difference (SRD)15,16 gives a measure of the smallest statistically significant difference. Any change greater than the SRD implies 95% confidence that there is a real change. For SHAP the SRD was 2.0 (calculated from the overall score of the normative group). This does not assume that the scores are distinct clinically, but this assertion is supported by the observation that scores for normal subjects differ by less than three on repeated measures. 8
Prosthetic hand tests
The basic form of the powered prosthetic hand, as fitted clinically for the past 50 years, has been the single degree of freedom hand set in a single grip, generally precision grip.2,17 Recent developments have enabled the hands to be made shorter, allowing their use with persons with a loss across the carpels. The additional space allows for three or five position flexion units to be placed at the proximal end of the hand, while not increasing its length over the earlier designs, for more information see the manufacturer’s literature.18,19 This advance permits persons to use a hand and wrist combination without any other change to their socket. Experimentally, this allows for direct comparisons to be made between a hand alone and hand and wrist in combination. This is achieved, simply by operating the hand with or without the wrist flexion. This creates a simple experimental design, keeping all other factors the same. The second factor in the experimental design was to keep the subject the same.
In this experiment, two hands and wrists produced by Motion Control Inc 1 were tested. The flexion wrist is operated by the user releasing a catch on the dorsal surface of the wrist and placing the hand in one of three positions (extended, neutral or flexed). By using this feature the hand can be orientated in a position much closer to that used by the unimpaired. The hypothesis was that this arrangement would create a more functional prosthesis.
A second wrist design produced by Motion Control that also fits within the envelope of the hand is known as the Multi-Flex wrist. This is a complaint structure that allows the hand to move in directions analogous to flexion/extension and radial/ulnar deviation. Motion is resisted by springs and the flexion/extension can be locked giving only sprung radial/ulnar deviation, this feature was not used here. This design allows for more flexible interaction with the objects being picked up, the hand partly adjusts to the orientation required for a stable grip. It was hypothesised that with a less stringent requirement for the approach orientation of the hand, grasping an object securely would be easier.
Method
Subject
This study measured the function of the device alone while attempting to remove the influence of the operator. Hence a single user was chosen and repeated measures were made over time. The relative scores emphasise the differences between devices.
The subject was the author who has irregularly used myoelectric control over the past 25 years. He has operated many hands using a custom socket over his intact forearm. Preparation included general activities with the hand. SHAP is designed to test the function of the subject and hand. By the use of a single subject, inter-subject variations could be reduced substantially. The use of the experimenter also allowed many more repetitions of the test to be performed than would be practical or ethical with a cohort of users. Since it was performed by the experimenter on the experimenter no ethical approval was required.
Equipment
The subject was fitted with a splint over the left forearm, extending from the fingers to the olecranon, positioned over the dorsal surface of the arm and displaced approximately 15 cm distally from it. 1 Otto Bock myoelectrodes were held over flexor and extensors, in a conventional manner. The splint was manufactured by the prosthetics team at the Institute of Biomedical Engineering, using conventional materials and techniques. The hand was used with a standard quick disconnect wrist unit, and the socket retained the batteries. The hand-eye relationship was similar to that of a routine fitting and did not impede the subject’s motion.
The left hand was chosen as it was the subject’s non-dominant hand. This was considered appropriate, as the majority of prosthesis users with a single loss use their prosthesis in a non-dominant manner, irrespective of any natural dominance. SHAP requires the hand under test to be the leading (dominant) hand. Thus a genuine user performing SHAP with their prosthesis would be employing their non-dominant hand in a dominant fashion. By using the left (non-dominant) hand the situation was repeated.
Protocol
The subject was seated at a table, with relaxed shoulders and arms resting on the table, elbows at 90 degrees. The form-board with timer was placed directly in front of the subject, approximately 10 cm from the edge of the table. Each task started with the hand under test pressing the timer. The subject performed the action and then turned off the timer with the same hand. If an error in execution occurred which was considered unrepresentative, the test was repeated, otherwise the first time was recorded.
The test was performed twice a day for 11 successive working days. The first day was used for the adjustment of electromyogram (EMG) amplifier gains and the familiarisation with hand and control scheme. The next 10 days were divided into two equal epochs. The programme is summarised in Figure 1. These trials were conducted at a different time to the hand assessment trials. 1

The programme of tests performed using the wrist. The flex-wrist was compared with the prosthesis without flexion by using the same hand without the flexion being employed. The order of flexion use or not use was reversed every day. The figure also shows which statistical test was used with which run.
Hands tested
Two Motion Control, MC Hands were used with different wrists and the same control format (proportional voluntary opening – extensors, voluntary closing – flexors). The two wrists used were: three position Flexion Wrist and compliant wrist (Multi-Flex), both from Motion Control.
The hand with the flexion wrist was operated either using the wrist, or leaving the wrist in neutral and employing the hand and other body motions to perform the task. Flexion wrist trials: on the first day, the hand was used without flexion (‘no wrist’ condition) and the second day the wrist axis was employed (‘wrist’ condition). On successive days the order was reversed. Thus order effects were removed. A second, similar hand with the Multi-Flex wrist was tested separately, with two tests per day for six successive days, the final five days (10 tests) were then used to compare with the wrist and no wrist conditions. From this the impact of the design of the hand could be separated from the design of the wrist and only the wrist’s impact on the function could be observed.
Data analysis
Two comparisons were made using unpaired Student’s t-tests:
The use of wrist flexion with no flexion (no wrist condition with wrist condition);
The use of a compliant wrist compared to a fixed wrist (no wrist condition with Mulit-Flex condition).
The overall scores for each condition, in addition to each of the grip types, were calculated.
Results
In the complimentary study of hand designs, 1 it was shown that there was no significance in the order a test is made on any one day so both runs on any one day could be considered together. Similarly, that learning effects on the use of any hand had ceased. The results of comparing the wrists are shown Figure 2. A comparison between the three wrist types is possible as the hand mechanism is the same on each occasion, so only the wrist has an influence on the scores. The graph shows the mean of the 10 runs. For the flexion wrist the score was significantly higher for the Power, Lateral and Tips grips. For the Multi-Flex wrist the score was higher in the Lateral, Tips and Extension grips, but less functional with the Power grip.
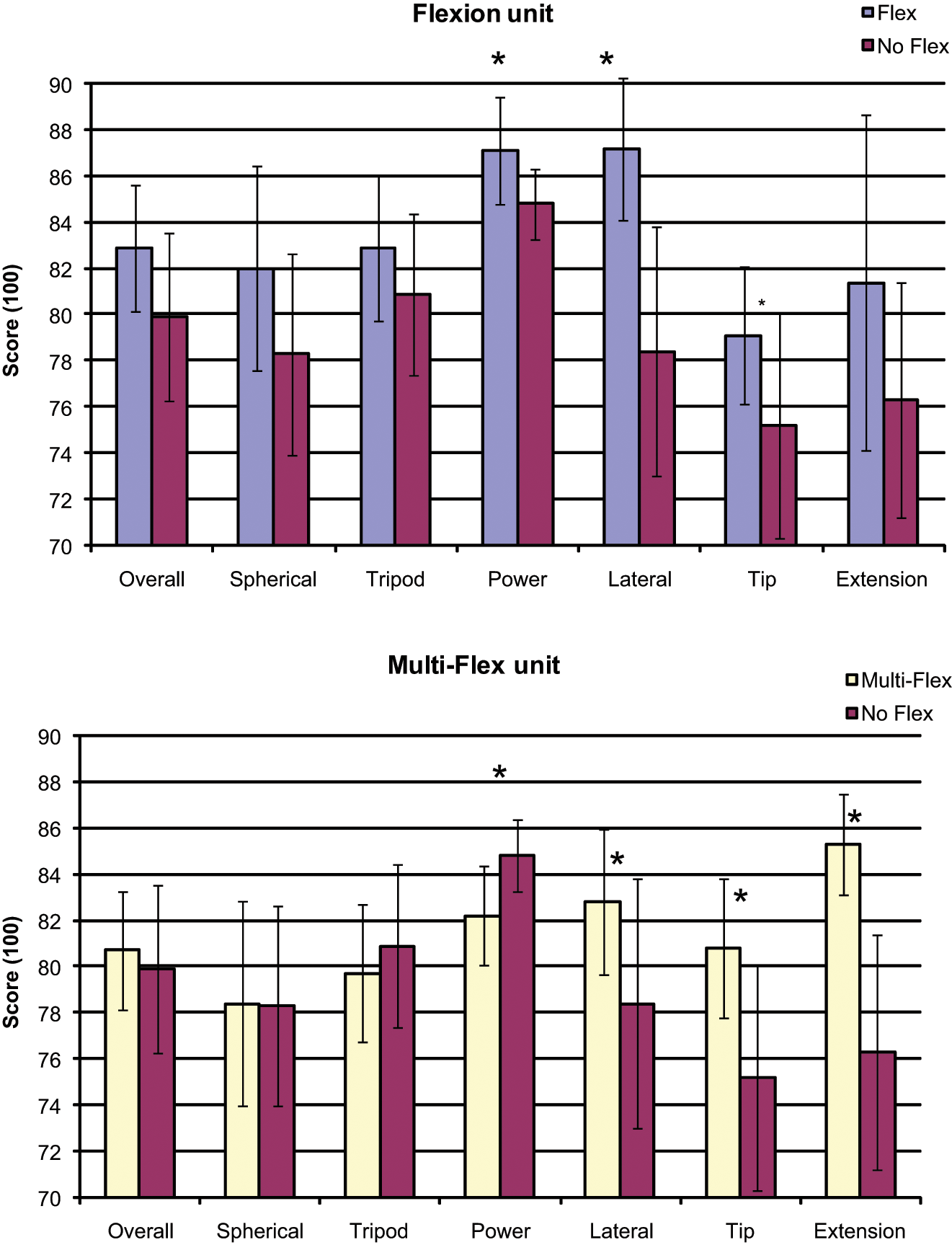
Use of different wrist designs with the Motion Control hand system. Daily use of the same hand mechanism compared to that of the hand with a three position flexion wrist, and one with built in compliance in two directions. A star (*) indicates significance at the 0.05 level (Student’s t-test).
Discussion
There was a measurable increase in score with the use of either of the wrists and the non-use of a wrist unit. The flexion unit places the hand in one of three positions: neutral and ±30° of flexion. This enabled the hand to be placed at the correct angle to horizontal or vertical surfaces without needing the shoulder elevation and humeral rotation used with a non-flexing wrist. The impact of the flexion on the functional score was significant; Power, Lateral and Tips grips were more functional (Student’s t-test, p < 0.05, two wrists, 10 tests per condition). This improvement is likely to result from placing the hand in the correct position to grasp the object securely. For example, the pouring task requires the hand to grasp a carton and pour the contents into a jar. When the wrist is flexed it is easier to grasp the carton, and leaves the shoulder elevation for pouring the carton, rather than to have used some of the range of the shoulder to grasp the object first. Similarly, the zip, key and door handle tasks are made simpler as the wrist can be extended placing the finger tips towards the vertical surface parallel to the coronal plane, rather than the subject having to flex the shoulder to place the elbow in front of the body.
With the Multi-Flex wrist, the Lateral, Tips and Extension grips are all significantly more functional than without the wrist. The Multi-Flex wrist is a complaint structure, but this motion is uncontrolled, having only one spring rate in the compliance. The spring also allows the hand to droop if it is holding even a moderately heavy object. However, it does mean that the precise alignment of the hand relative to the target object need not be tightly constrained, as would be necessary with the rigid grip of the conventional prostheses. As the hand grasps the object it is allowed to move relative to the object as it closes, spreading the load and making the grip more secure. There is some evidence from motion analysis of grasping tasks that prosthetic hands require a much more tightly constrained approach for a stable grip, 20 so a more compliant grip may be forgiving of misalignments and still perform a stable grasp. The Power grip was less functional with the Multi-Flex wrist. This could be because Power grips rely on a rigid platform to grasp the object and the compliant wrist does not create those conditions.
These results reflect the potential changes in functional capabilities of a person using the hand/wrist prosthesis. They do not closely reflect any clinical changes, as these depend on the many other factors that influence how a person uses their prosthesis; from the level and quality of their occupational therapy training to the time it has been since they started wearing a prosthesis, to their particular cognitive and kinesthetic abilities.
Since the same type of hand mechanism was employed, much potential variation between tests was removed; the only change was the use of the wrist. Similarly, performing the test with and without the flexion on the same day ensured that the assessments were made at the same level of competence and changing the order of use removed order biases. The use of a single subject controls the variation between subjects, and also allows a much larger number of repetitions than would be possible with routine users. While the relative position of the hand is slightly different to that of a prosthesis, it is sufficiently close that it does not effect the motion of the hand unduly. Any specific difference to the user population is the same for all tests and so is factored out of the results.
As the results are based on a single user, they need to be judged as the function of one hand, relative to another. When another subject is tested, if they have a lower score for a particular device, then it is likely that scores on other devices or controllers will be proportionately lower too.
Conclusion
Unpowered wrist flexion has a positive impact on the functional score of a single degree of freedom prosthetic hand, enabling tasks to be performed more quickly and with potentially fewer compensatory motions.
Footnotes
Acknowledgements
The author would like to thank Motion Control loan of the hands under test. The author would also like to thank the staff of the Fredericton Limb Centre for their assistance, and the reviewers for their comments and insights.
Funding
This study was supported by the the Canadian Foundation for Innovation, Canada Institutes of Health Research, New Brunswick Innovation Foundation, NSERC (312094-05), Canada Research Chairs Program.
Conflict of interest
The author reports no conflicts of interest.