
Abstract
The hoop truss structure with extended arm has large diameter and great flexibility. These two characteristics cause low frequency and affect the technical requirements of modern satellite system. This article investigates the active vibration control of the hoop truss structure with extended arm. At first, proportional plus derivative algorithm and least mean square adaptive filtering algorithm are applied to derive the vibration control equation. Then, based on the first two modes calculated by finite elements method, the positions of the actuators are optimized. Finally, the excitation simulation and the closed-loop control simulation for suppressing the low frequency vibration are established. The simulation result illustrates that the amplitudes of the responses are decreased significantly under the steady state excitation after adopting the intelligent control algorithm.
Keywords
Introduction
The hoop truss structure has the characteristics of large size, great flexibility, light weight and weak damping. The above-mentioned parameters induce the two impacts: the low frequencies and the weak ability of resisting deformation. When the hoop antenna of satellite consisted of truss structure is subjected to external incentive such as engine excitation, thermal load and so on in space environment, the dynamic response is complicated. Because the hoop truss antenna is used for the data transmission between space and ground, the vibration of hoop truss significantly impacts the performances, such as stability, reliability and accuracy and so on. When the satellite changes orbit and attitude, the frequency of the disturbance may be close to the fundamental frequency of the antenna. The antenna array and the whole satellite vibrate to affect the performance of the satellite. Accordingly, the antenna structure has resonance phenomenon, as a result, the vibration occurs seriously. What is more, the satellite may be scrapped.
According to the characteristics of hoop antenna, an effective solution is urgent for aerospace engineers. In order to meet the technical requirements in the aerospace engineering, vibration analysis and vibration control are the key issues for ensuring the satellite safe in the complex space environment. At present, the research on the vibration characteristics and vibration control of truss structure gets much attention. Many scholars have studied the vibration theory and vibration control strategy.1–4
The active vibration control (AVC) is effective to suppress or eliminate the vibration of flexible structures, and widely applied in aerospace (like plane wing, solar panel), architecture, civil, industry and so on. Especially, along with the development of smart materials, the AVC based on intelligent control algorithm becomes an important approach for the low frequency vibration control. Among various smart materials, piezoceramics owns the advantages of being lightweight, low-cost and easy-to-implement, and offers the sensing and actuation capabilities that can be utilized for passive vibration control and AVC.5,6 The piezoelectric (PZT) material can be utilized as sensor, and suitable for constructing large-scale actuator devices in the intelligent structures. 7 Usually, the PZT actuators outputs large force, being exhaustively utilized in the control of the structural deformation, 8 though the magnitude of the output displacement of the PZT actuator is small. As for flexible hoop truss structure with large diameter, the magnitude of vibration displacement is occasionally larger than the micro scale. This problem requires the actuators to output larger force and displacement at the same time. Generally, the voice coil actuator (VCA) can outputs linear force, displacement and torque.9,10 This actuator has the advantages of small size, large stroke, fast response, high acceleration and remarkable effect on the vibration control. Therefore, this kind of actuator is suitable for the AVC of large size flexible structure with large deformation. An et al. 11 adopted VCA to suppress the vibration of hoop truss structure. The control method was applied for the first-order mode. His study may be more reasonable if he consider the situation of the hoop truss structure with an extended arm, because the mode of the whole structure will be more complicated.
Furthermore, the purpose of vibration control is simple and quick to achieve inhibition. It is necessary to research the control algorithm. At present, there are plenty of control methods. Poh and Baz 12 controlled small amplitude vortex-induced vibrations of flexible cylinders using a robust adaptive least mean square (LMS) algorithm. Guan et al. 13 designed an enhanced delayed-x LMS adaptive control algorithm to generate the appropriate control signals. Kumar and Narayanan 14 investigated the optimal placement of collocated piezoelectric actuator-sensor pairs on flexible beams using a model-based linear quadratic regulator (LQR) controller. Julai and Tokhi 15 presented the development of an AVC system with distributed disturbances using genetic algorithms. Li and Huang 16 integrated the optimization of actuator placement and vibration control for piezoelectric adaptive trusses by using of linear quadratic Gaussian (LQG) controller. Miao et al. 17 used macro composite fibre in the AVC of the cantilever beam with proportional plus derivative (PD) and fuzzy controllers. Yazici et al. 18 studied the design of a state-feedback delay-dependent H∞ controller for vibration attenuation problem of a seismic-excited container crane. Mystkowski 19 adopted Mu-Synthesis robust control for 3D bar structure vibration using piezo-stack actuators. Luo et al. 20 set up the active control system based on the PD algorithm, and built the simulation model using the Simulink platform and experiment using a pair of matching PZT stacks. Loghmani et al. 21 studied the AVC of a cylindrical shell using piezoelectric disks and an adaptive feed forward controller. Liu et al. 22 developed optimal delayed feedback control to mitigate the resonances of a flexible simply–simply supported beam with piezoelectric sensor and actuator. Among these control algorithms, PD control is a kind of linear feedback control, and easy to design and operate. The object of the LMS adaptive controller is the uncertain system. The main advantage of LMS adaptive control scheme is that the reference signal is not filtered by the generally large-order impulse response model of the secondary path. It is possible that the system is not stable in some cases. The LMS algorithm has good astringency and stability through system’s autonomous learning. Thus, these two algorithms are simple and reliable.
The purpose of this article is suppressing the low frequency vibration of a hoop truss structure with extended arm by means of adopting VCA and PZT moment actuators to establish closed loop control system by using PD and LMS adaptive algorithm. The remaining parts of the article are organized as follows. In ‘The theoretical analysis’ section, the vibration control theory is derived from vibration equation in consideration of two algorithms. The response can be calculated by state space equation subsequently. In ‘Mode analysis’ section, finite element software is used to establish the model, and solve the natural frequencies and mode shapes. In ‘The AVC scheme’ section, the actuator position is optimized. The excitation simulation is presented. In ‘Simulation of the AVC’ section, two intelligent control algorithms are applied to establish the simulation of the closed-loop feedback control for suppressing the low frequency vibration. Finally, the concluding remarks are made in ‘Conclusion’ section.
The theoretical analysis
The hoop truss structure with extended arm consists of a number of lumped masses, hinges, flexible rods and beams. The flexible structure is a multi degree of freedom system, besides, it has complex vibration modes. Certainly, this structure can be vibrated by excitation force, and suppressed by control force. Based on the theoretical derivation, the relationship between input and output can be obtained. When the excitation force Fe and the control force Fa are acting on the entity, the forced vibration equation is



The spatial displacement function Φ is written as


In this article, the Fe and Fa are generated by some linear output actuator, and the unified writing is



Then, in order to reduce the amount of computation, equation (8) can be reduced to the state space equation used to describe the transfer between the input and output after reducing the degree of freedom by using of mode truncation method.


As the negative feedback adopts LMS adaptive filtering algorithm with stability, the theory of LMS-based feedback control is shown in Figure 1.
LMS-based feedback control.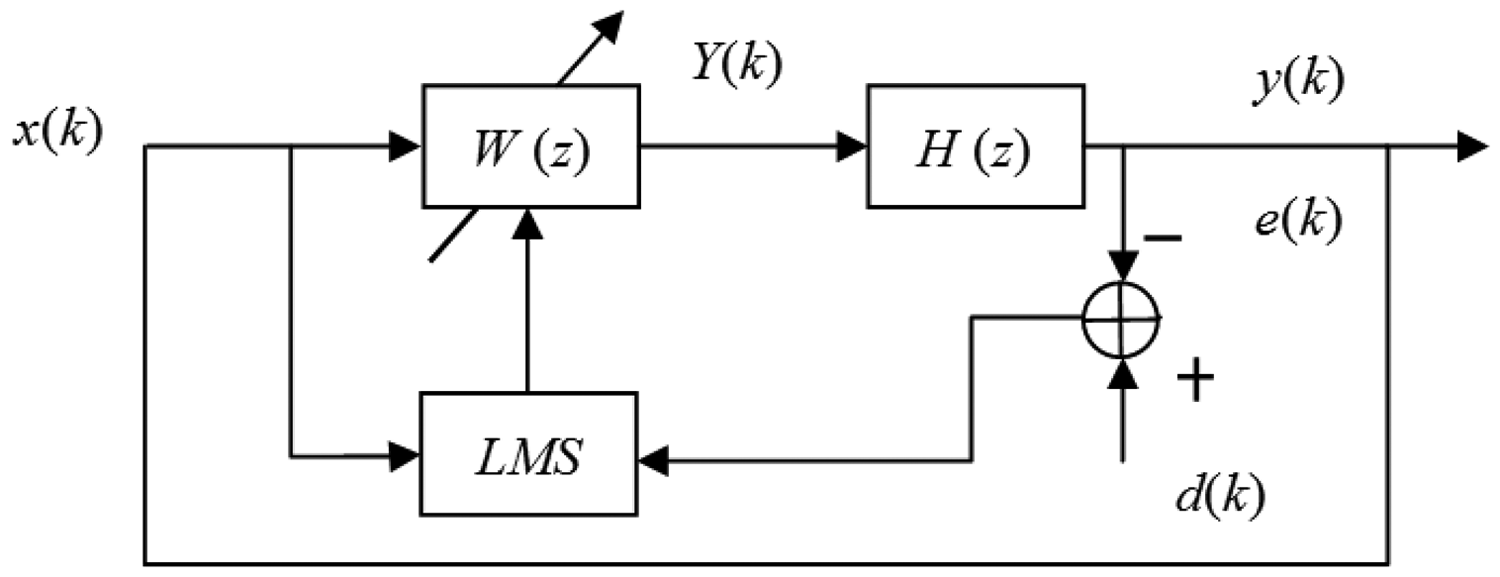
In Figure 1, W(z) is finite impulse response (FIR) filter, H(k) is transfer function of system, d(k) is disturbing signal, being equal to feedback signal x(k), Wi(k) is the ith coefficient of FIR filter with sample k and Y(k) is filter output for controlling current or voltage of actuators.


According to Poh and Baz,
12
the next coefficient of FIR filter is


At last, the vibration equation (5) can be rewritten as the state space equation.
Mode analysis
A premise of the AVC is the mode analysis of the hoop truss structure with extended arm. The finite element software is used to solve the vibration characteristics.
MSC Patran is used to establish a two-dimensional beam element model of the hoop truss structure with extended arm. The model contains 44 points and 81 CBAR elements shown in Figure 2. The software MSC Nastran is used to solve the natural frequencies and mode shapes by using of Lanczos method. Actually, the characteristic value and characteristic vector of multi degree of freedom system are calculated in this process. The parameters of the hoop truss structure are shown in the Table 1. The first two-order mode shapes are shown in Figure 3.
The finite element model. Parameter (m). The first two-order mode shapes.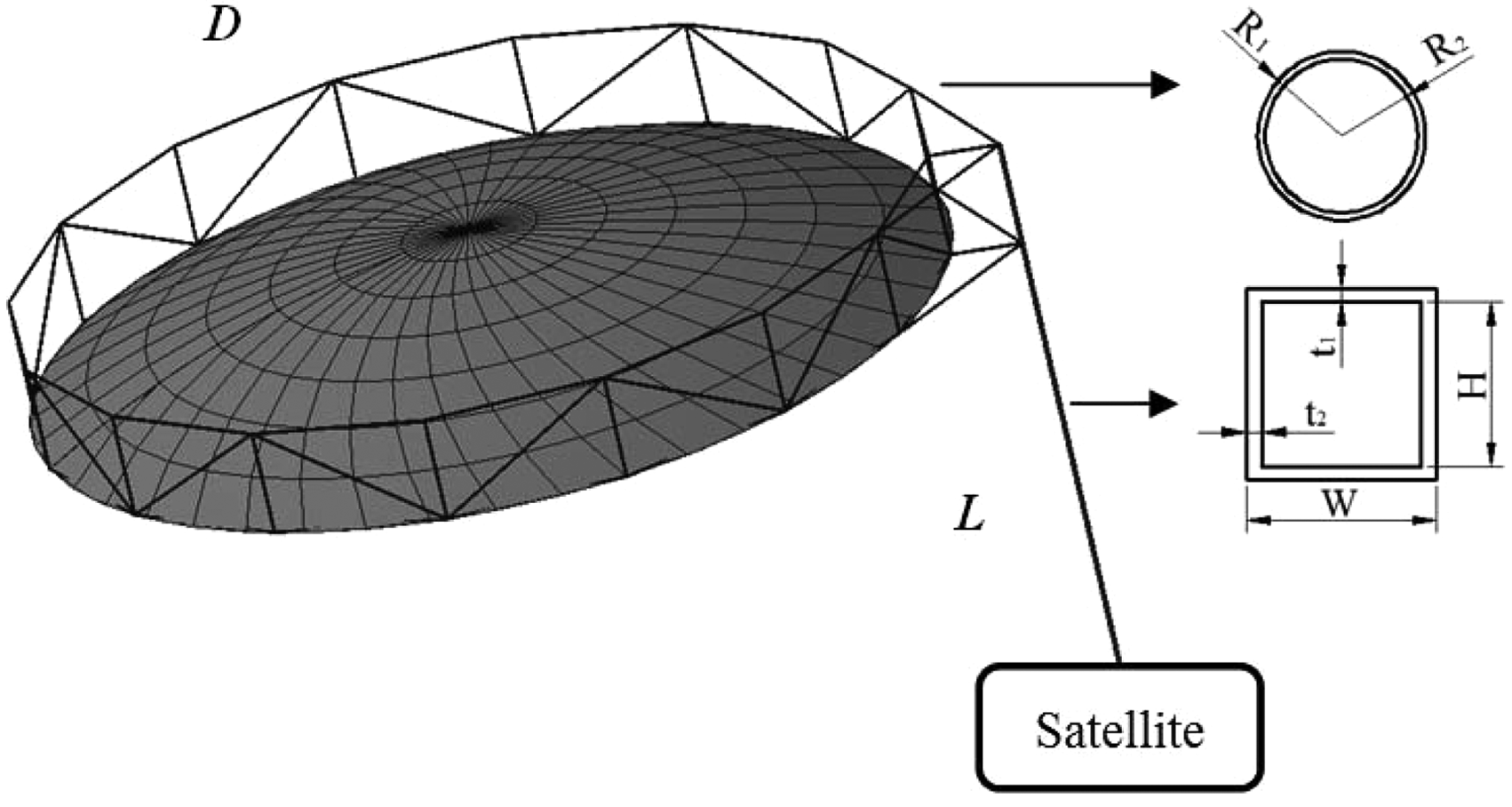

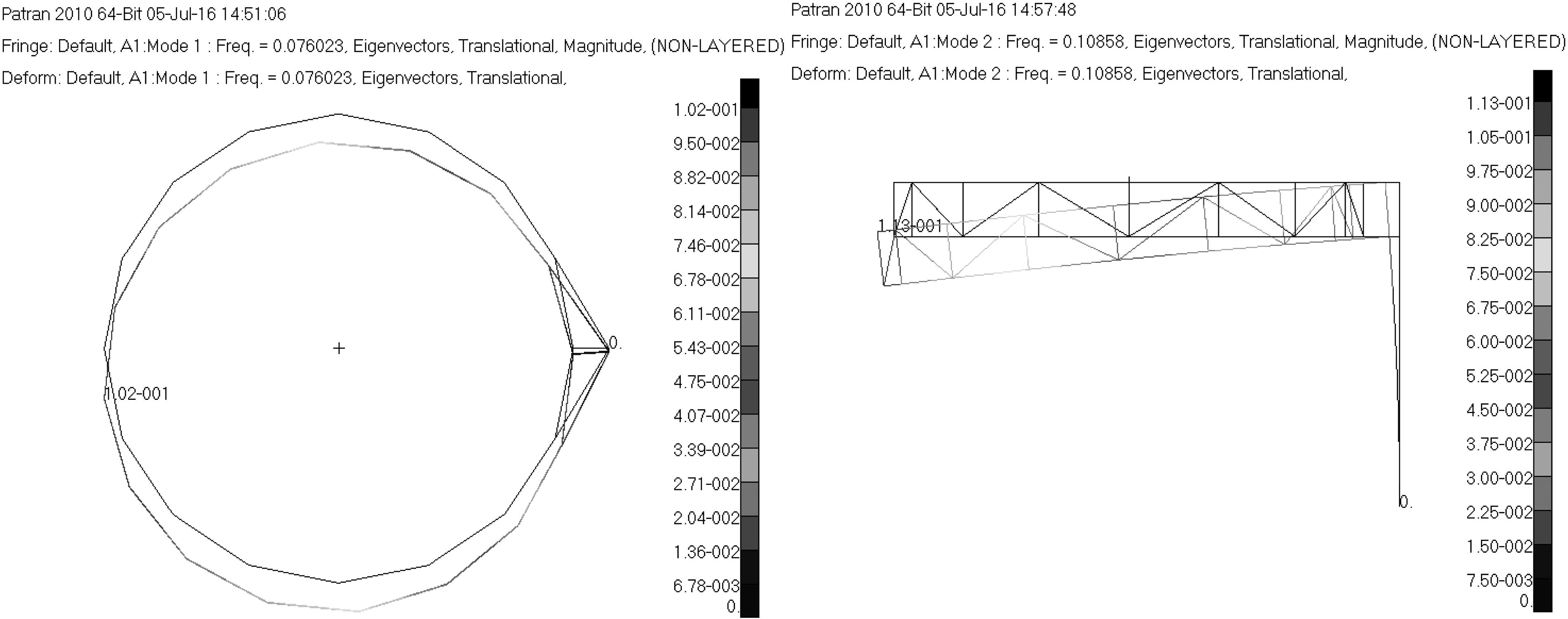
The first-order natural frequency is 0.076 Hz, and the second-order natural frequency is 0.108 Hz. It is clearly seen that there is the low-frequency vibration of the hoop truss structure. The first two-order modes are two directions of deformation called ‘shaking’ and ‘nod’ modes, respectively.
The AVC scheme
Generally, the actuators are installed in the structure. Luo et al. 20 and An et al. 11 used piezoelectric actuator and VCA to establish the control system for the first mode of hoop flexible structure, respectively. However, the output displacement of the PZT actuator is small. The position of the VCA may affect the folding and unfolding of the structure. Thus, this article focuses on optimizing the position of actuators according to the first two mode shape of hoop truss structure with extended arm. In order to achieve optimal control effect and avoid affecting the hoop truss structure folding and unfolding, all the actuators positions need to optimize.
Position optimization for ‘the first vibration mode’
In one case, the VCA is installed on the main support rod L3 (0.12 m) shown in Figure 4(a). There are the following computing relations, equations (15) to (19):
(a) Actuator position for the first vibration mode and (b) the moments to the inclined rod.




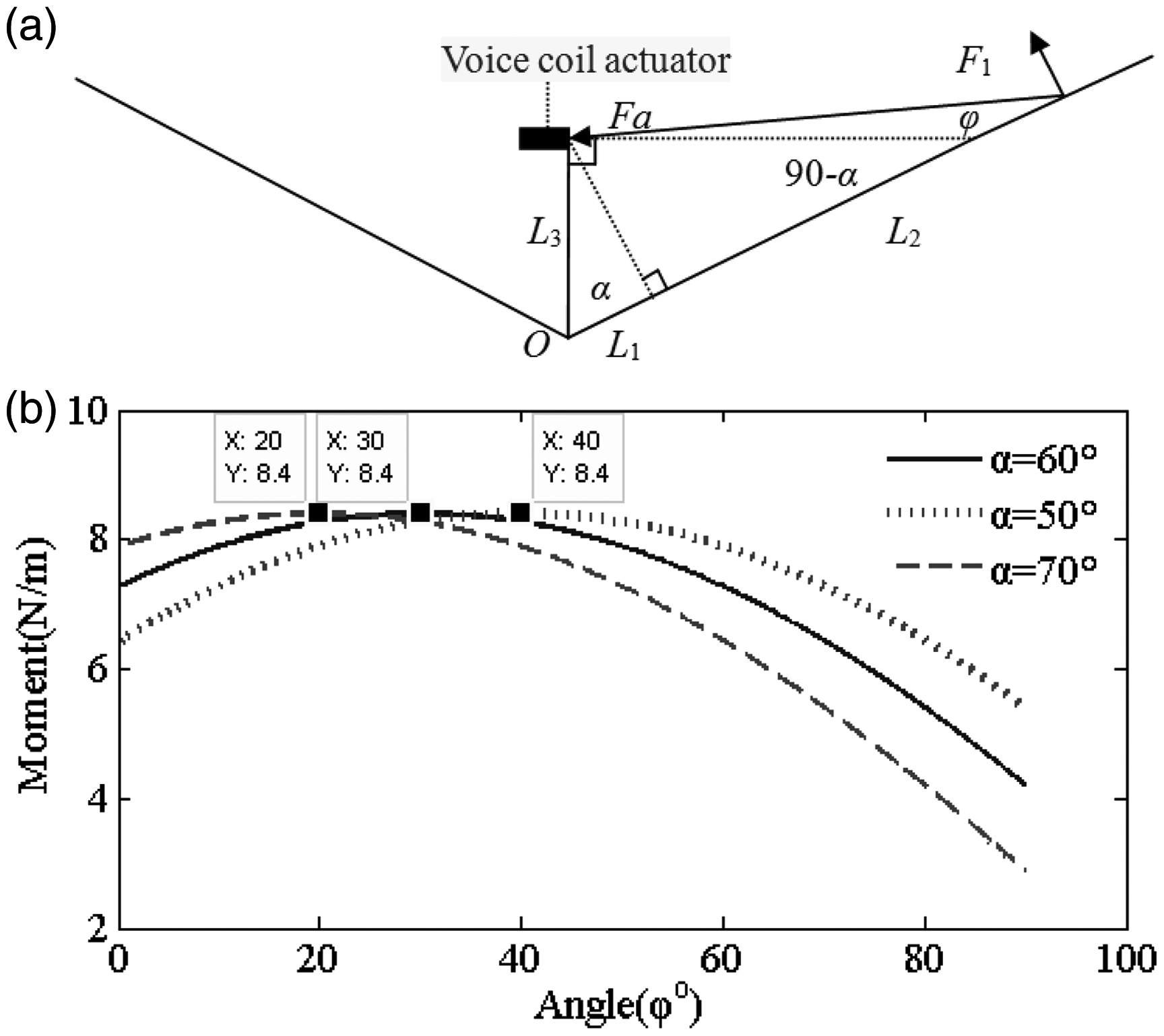
Figure 4(b) shows the moment of the actuator to the inclined rod L1L2 and illustrates that the moment is maximum when the angle ϕ is the coangle of angle α. When angle α is 50°, 60°, 70°, Famax = 70 N, the maximum moment is all 8.4 Nm.
In another case, the hoop truss structure is fixed on the extended arm through three support rods. The two VCAs are fixed at the end of the extended arm and parallel to the inclined rods shown in Figure 5. The geometric relations can be known from the graph, where angle α is 60°, length d between Kevlar rope and inclined rod is 0.3 m.
Actuator and sensor positions for the first vibration mode.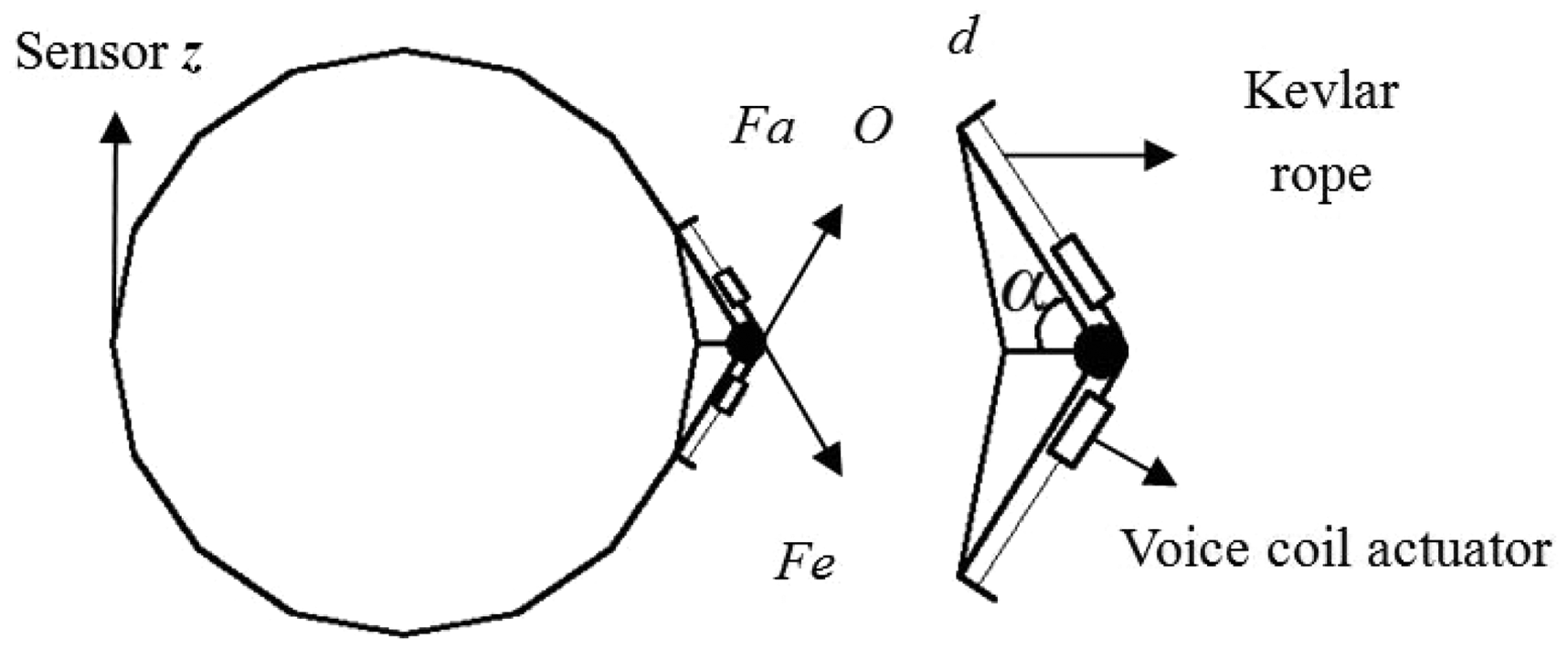
As the coil inputs current I, the VCA generates axial force and output large displacement. A VCA for excitation output force Fe = 70*sin(ω1t) N, and another VCA for control output the same force Fa = f*I(t)N, Famax = 70 N. Then, the moment of the actuator to the point O is M = Fa*d, Mmax = 21 Nm. This moment is more than the moment in the first case. Although L3 can be longer in Figure 4(a), the position of Figure 5 avoids affecting the hoop truss structure folding and unfolding. Therefore, the actuator position shown in Figure 5 is optimal.
Position optimization for ‘the second vibration mode’
Figure 6 shows two cases for installing VCAs, indicated by the arrows accordingly. Where Fe = 70*sin(ω2t) N, Fa = f*I(t)N, Famax = 70 N, h = 3 m, l = 2 m, ψ1 = 60°, the two moments produced by the VCAs are
Actuator and sensor positions for the second vibration mode and the two actuators.

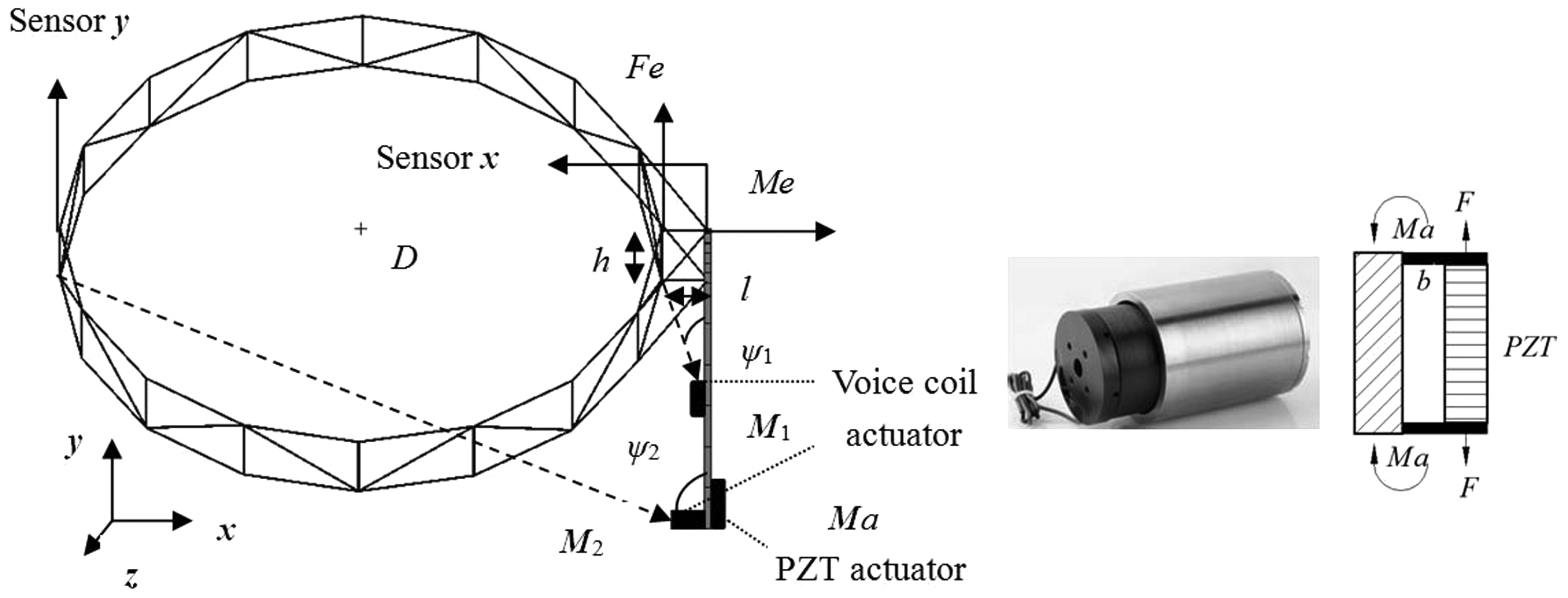
The comparison between the two moments is M1 < M2. Although M2 is maximum, M1 is the most suitable for installation and does not affect the hoop truss structure folding and unfolding.
In addition, there are also disturbing force Me = 10 N, control moment Ma = F*b = f*V(t)*b Nm, Mamax = 50 Nm, generated by the PZT stack. As the PZT stack inputs voltage V, the PZT moment actuator generates axial force F and outputs micro displacement. The PZT moment actuator is installed at the root of the extended arm for controlling the extended arm.
Spectrum analysis method
In order to verify the simulation model, the natural frequencies of the hoop truss structure with extended arm are obtained by the spectrum analysis method. If the structure is excited by impulse excitation, such as initial displacement or velocity, the vibration response will be the free attenuation curve. The sensor can measure the time domain waveform of the response reflecting the linear superposition of each free attenuation vibration containing each order frequency. The response magnitude also reflects the excitation capacity of actuator. The spectrogram is obtained by using Fast Fourier Transform (FFT) for the time domain waveform. Each peak in the spectrogram is the each order natural frequency.
Using Matlab/Simulink to establish the excitation simulation of the hoop truss structure shown in Figure 7, the Mode force containing Fe or Me, is excitation force shown in Figures 5 and 6. The Gain 1 is mass matrix The excitation simulation diagram.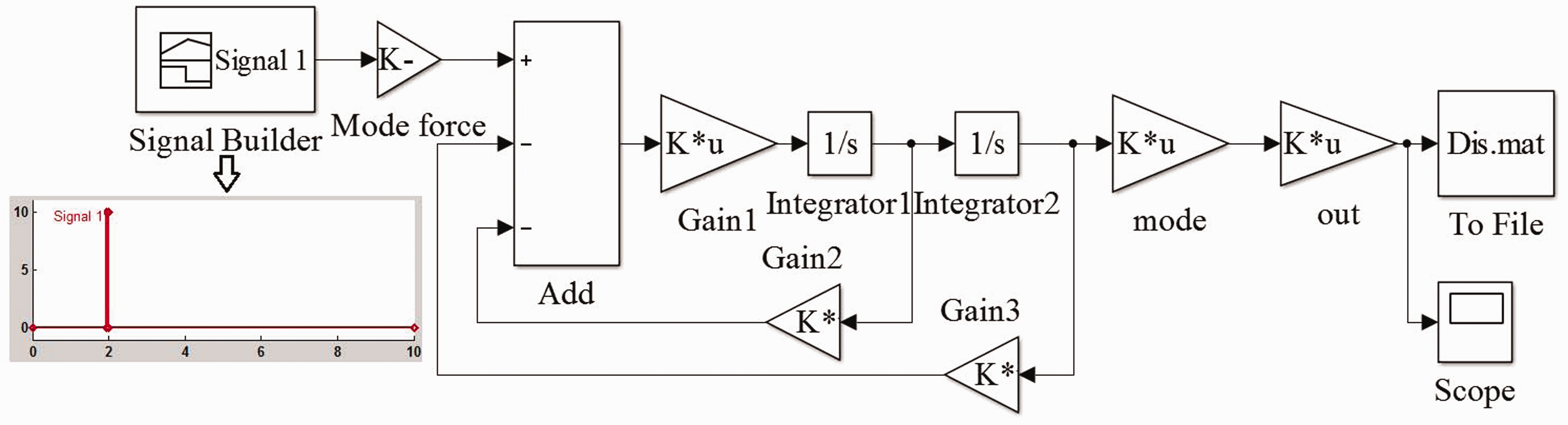
The first two-order spectrogram is shown in Figure 8. The first- and second-order natural frequencies are 0.07667 Hz and 0.1067 Hz. These values are close to the frequencies calculated by the finite elements method (FEM).
(a) The first-order natural frequency and (b) the second-order natural frequency.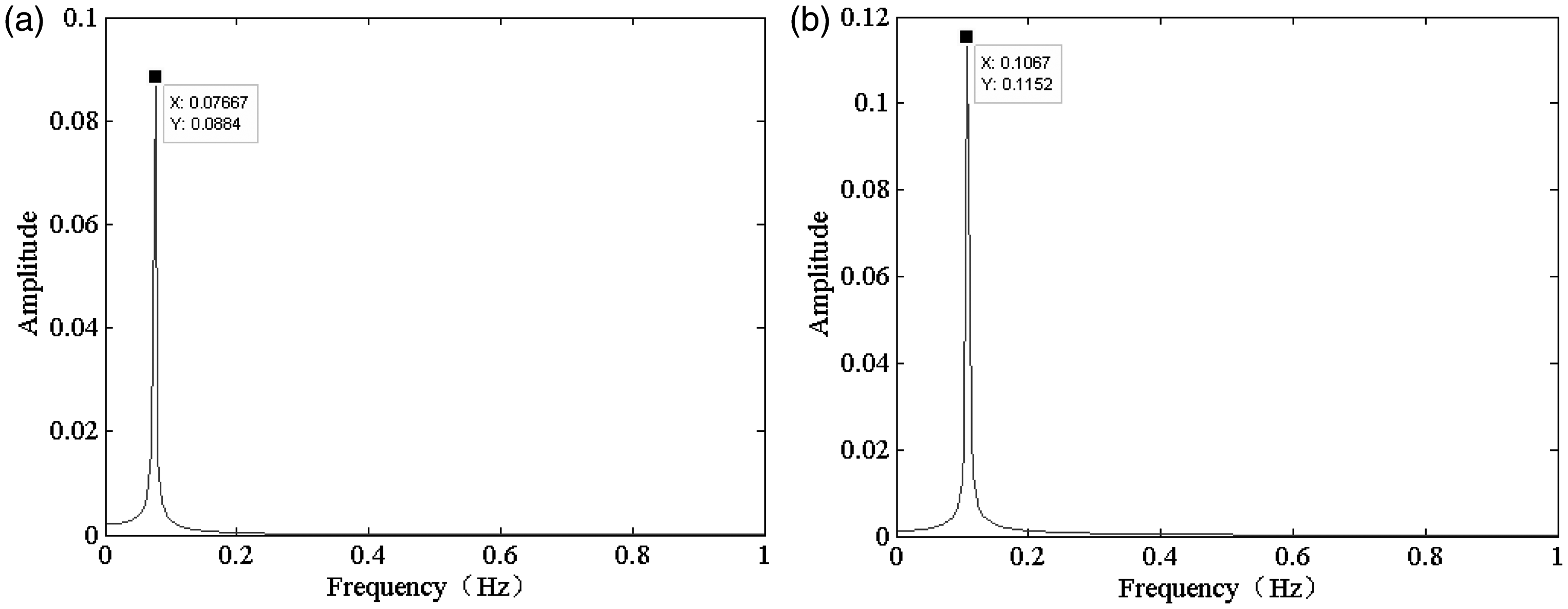
Simulation of the AVC
The AVC system consists of actuators, sensor, controller, driver and other devices in application. The excitation signal and control signal are produced by the controller. Meanwhile, the driver receives the signal and outputs driving signal to drive the actuators. The VCA and PZT actuators output force to vibrate or control the object. The sensor measures the response of some points in the object as a feedback signal for aiming to build a closed-loop control.
As shown in Figure 9(a), Matlab/Simulink is applied to set up the closed-loop control program of the simulation for the first two vibration modes. The excitation is sine signal multiplied by Fe and Me. The uncontrol containing the state space equation directly outputs response. The control containing the state space equation as well, outputs response after controlling. The measure outputs feedback signal to the algorithm containing PD or LMS algorithm in order to produce control signal, respectively. The actuator converts the control signal into force Fa and Ma for suppressing the vibration, where the gains kk and kk1 transform the control signal into the force signal.
(a) The closed-loop control simulation diagram and (b) the diagrams of Uncontrol, Control, Actuator, Measure; the schematic diagram of the whole AVC system.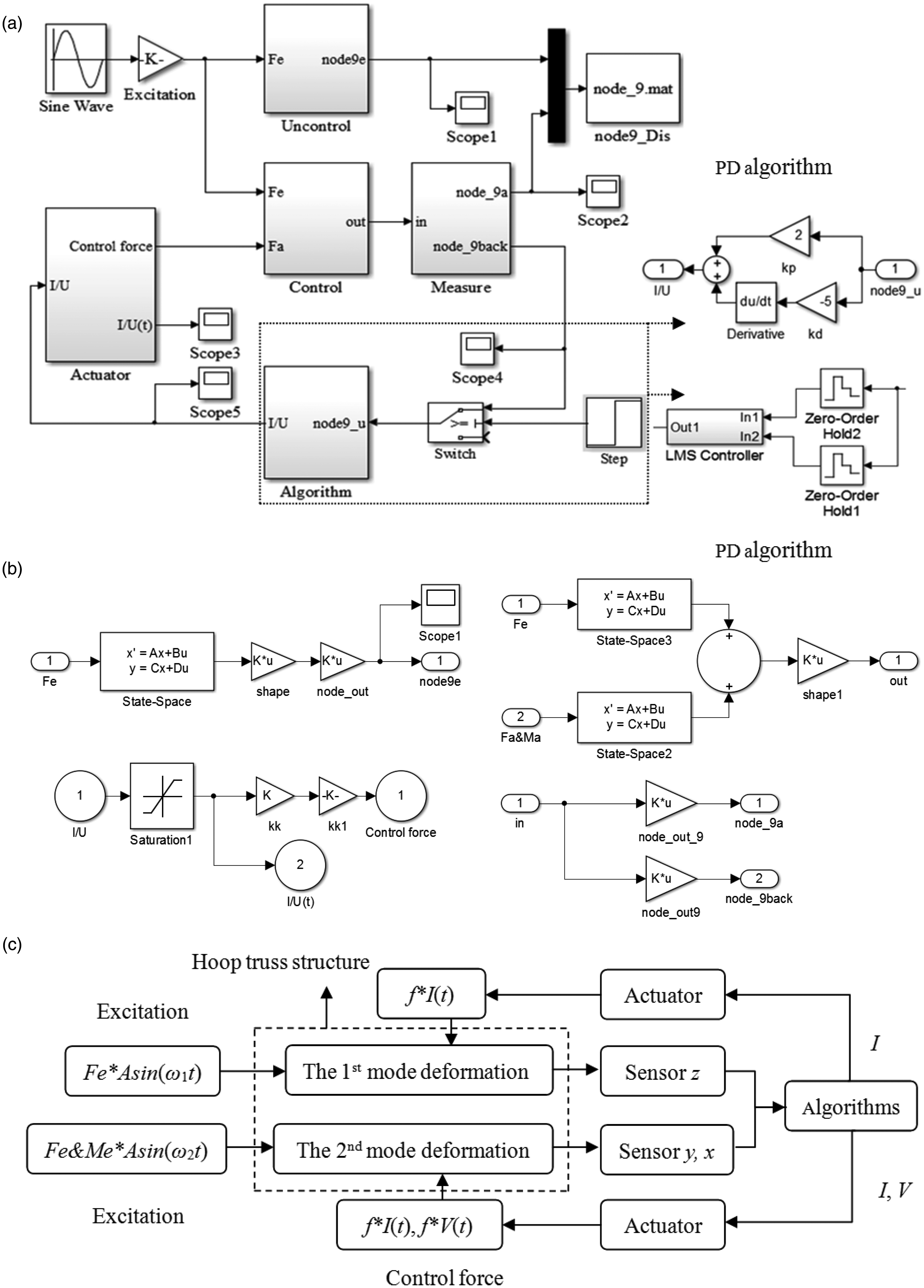
Usually, the AVC is suitable to suppress the low frequency vibration. It is noticeable that the first two-order frequencies of the hoop truss structure are below 1 Hz. Therefore, the first two vibration modes can apply the AVC. The excitation force, the control force and other information are described in ‘The AVC scheme’ section. An actuator excites the structure. At the same time, the other actuator controls the structure. Figure 10 shows the displacement control curves under the steady state excitation Fe*Asin(ω1t), Fe*Asin(ω2t), and Me*Asin(ω2t), where A is the amplitude.
(a) The first mode, vibration amplitude control curve measured by sensor y; (b) The first mode, vibration amplitude control curve measured by sensor y; (c) The second mode, vibration amplitude control curve measured by sensor z; (d) The second mode, vibration amplitude control curve measured by sensor z; (e) The second mode, vibration amplitude control curve of the extended arm measured by sensor x; (f) The second mode, vibration amplitude control curve of the extended arm measured by sensor x.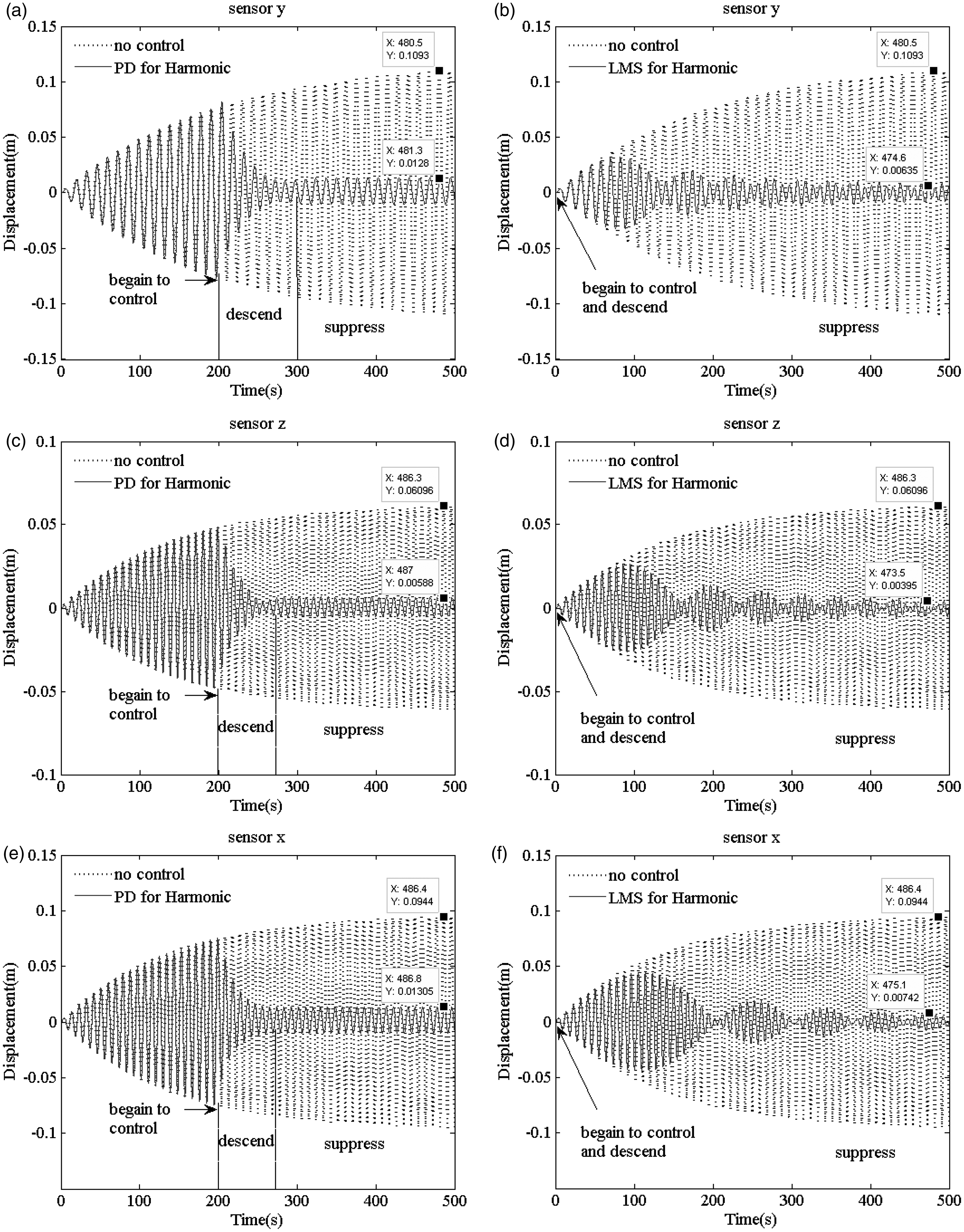
According to simulation diagram, the PD controller begins to be applied when the excitation effects for 200 s. The process of LMS adaptive control without delay module (switch) is running at the beginning compared with PD control, because the LMS adaptive controller needs an iterative process. Figure 10(a), (c), and (e) shows the vibration amplitude control curves with PD control. It is clear that the time of descent is less than 100 s. Figure 10(b), (d), and (f) shows the vibration amplitude control curves with LMS adaptive control, besides they have lengthy processes due to the iterative process.
Parameters and amplitude inhibition percentage.

For example, the steady-state magnitude under the sine excitation is 0.1093 m, but the suppressed amplitude is 0.0128 m in the case of PD control shown in Figure 10(a). The amplitude inhibition percentage is 88.29%. The suppressed amplitude is 0.00635 m in the case of PD control shown in Figure 10(b). The amplitude inhibition percentage is 94.2%. Obviously, the control effect of the LMS adaptive control is better. On the basis of the data, the vibration response decreases dramatically after the AVC.
Conclusion
This article provides an approach to solve the problem of suppressing the low frequency vibration of the hoop truss structure with extended arm. First, the theoretical analysis is applied to clarify the principle of closed loop control by using PD and LMS adaptive algorithms. Second, the software Patran/Nastran is used to calculate the vibration characteristics of the complex flexible structure. Besides, the position of VCA and PZT moment actuator are optimized according to the mode shape. Third, the excitation simulation verifies the simulation model. The software Matlab/Simulink is applied to establish the excitation simulation and the closed-loop control program by using PD control and LMS adaptive control. At last, a comparison is presented to illustrate the parameters and amplitude inhibition percentages of the two controllers.
In the present analysis and simulation, the following main conclusions are obtained. On the one hand, the first two modes containing two directions of deformation, calculated by the FEM provide a reference for the optimization of actuators. The actuators are arranged in the proper positions to produce larger force and moment, and do not affect folding and unfolding of the structure. On the other hand, the results indicate that the amplitude inhibition percentages are all more than 85%. The PD control process is fast, but the LMS adaptive control effect is better. Consequently, it is obvious that the first two-order mode of the hoop truss structure with extended arm is suppressed significantly by using this approach. It can be concluded that the closed loop control system based on the actuator and intelligent control algorithm has enough performance to suppress effectually the low frequency vibration of the large hoop truss. It is an effective technique in space engineering. In the future work, it should be point out that new material can be used as actuator and sensor. What is more, new algorithm can be used to design the controller for experiment.
Footnotes
Acknowledgement
The authors would like to thank the editors and the reviewers for their help in improving the language and presentation of this article.
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This work was supported by the National Natural Science Foundation of China (grant no. 11672352).