
Abstract
The step size of least mean square (LMS) algorithm is significant for its performance. To be specific, small step size can get small excess mean square error but results in slow convergence. However, large step size may cause instability. Many variable step size least mean square (VSSLMS) algorithms have been developed to enhance the control performance. In this paper, a new VSSLMS was proposed based on Kwong’s algorithm to evaluate the robustness. The approximate analysis of dynamic and steady-state performance of this developed VSSLMS algorithm was given. An active vibration control system of piezoelectric cantilever beam was established to verify the performance of the VSSLMS algorithms. By comparing with the current VSSLMS algorithms, the proposed method has better performance in active vibration control applications.
Introduction
In mechanical and aerospace engineering, an increasing number of flexible structures were adopted due to their good characteristics. 1 However, mechanical flexible structures often incur unwanted vibration which can significantly degrade the performance and even result in catastrophic system failure. 2 In the past two decades, many useful achievements have been made by scholars in the field of active control of structural vibration.3–6 It shows that smart materials such as piezoelectric material can provide a feasible method to solve the active vibration control (AVC) of flexible mechanical structures.
Many flexible structures such as robot arms and aircraft wings can be modeled as a cantilever beam. Thus, it has become a research hotspot to suppress the vibration of piezoelectric cantilever beam effectively.7,8 The control method to suppress the vibration of piezoelectric cantilever beam covers almost all the branches of modern control theory: fuzzy control, 9 H∞ control, 10 optimal control, 11 adaptive control, 12 etc. Least mean square (LMS) algorithm is commonly used due to its robustness and ease of use. 13 However, there is a contradiction between the convergence speed and the steady-state error during the selection of step size in traditional LMS algorithm. Thus, different kinds of variable step size LMS (VSSLMS) algorithms were proposed to improve the performance.
Generally, the VSSLMS algorithm may be categorized by the adjusting signal.
14
Among them, most research works choose residual error as the adjusting signal. For example: Shan’s algorithm,
15
Kwong’s algorithm,
16
Aboulnasr’s algorithm,
17
Gao’s algorithm,
18
Bruhn’s algorithm,
19
Haweel’s algorithm,
20
Tortora’s algorithm,
21
Lan’s algorithm,
22
Zhao’s algorithm,
23
Costa’s algorithm,
24
Li’s algorithm,
25
Yan’s algorithm
26
and Huang’s algorithm.
27
Among them, the VSSLMS algorithm proposed by Kwong and Johnston
16
has variable step size according to the square of instantaneous error
As there exists a secondary path (including the digital-to-analog converter, reconstruction filter, power amplifier, vibrational path from actuator to error sensor, error sensor, and analog-to-digital converter) in an AVC system, the convergence of LMS algorithm or VSSLMS algorithm depends on the phase of the secondary path filter, exhibiting ever-increasing oscillatory behavior as the phase increases and finally becomes unstable at 90°. 28 Morgan proposed a solution to this problem by employing an inverse filter in the reference path, which is known as the “filtered-reference” method. Because the reference signal is commonly denoted by ‘x’, it is more popularly known as the filtered-x LMS algorithm. 29
In this investigation, a VSSLMS algorithm based on Kwong’s algorithm 16 was proposed to improve the robustness. An approximate analysis of convergence and steady-state performance for zero-mean stationary Gaussian inputs were provided. Also, an AVC experimental system with flexible piezoelectric cantilever beam was set up to verify the effectiveness.
This paper is organized as follows. In the next section, three VSSLMS algorithms and the proposed VSSLMS algorithm are presented. Then, the mathematical analysis of dynamic and steady-state characteristics of the new algorithm are presented. An AVC experimental system with flexible cantilever beam was set up to verify the effectiveness of the VSSLMS algorithms that is discussed in the penultimate section. The final section provides some conclusions.
The proposed VSSLMS algorithm
In this paper, the conventional LMS algorithm and three existing VSSLMS algorithms are selected to compare the effect of the proposed algorithm. In Table 1, the step size update equations and complexity comparison of these VSSLMS algorithms are presented. For convenience, Kwong’s algorithm 16 was expressed as VSSLMS-A. In the same way, Aboulnasr’s algorithm 17 and Huang’s algorithm 27 were expressed as VSSLMS-B and VSSLMS-C, respectively.
Comparison of complexity among the VSS-LMS algorithms.

VSSLMS: variable step size least mean square.
As presented in Table 1, the step size of VSSLMS-A
16
is updated directly from the instantaneous error. As the instantaneous error is oscillating and usually mixed with measurement noise, the algorithm VSSLMS-A
16
is inevitably sensitive to the noise. To improve the robustness, Aboulnasr and Mayyas
17
developed a VSSLMS algorithm updating the step size with the autocorrelation between
To obtain a better robustness, a VSSLMS algorithm was proposed based on VSSLMS-A. It was named VSSLMS-New in this paper. The updated equation of the step size of VSSLMS-New algorithm is as follows


In the new algorithm, a varying user parameter algorithm is used to refer to the fixed parameter in VSSLMS-A. With the property of the arc-cotangent function, the step size can be restrained in a reasonable range while the noise impacts on the error sensor. VSSLMS-New contains two user parameters, and it requires four multiplications in each interaction. It is comparable to its original version VSSLMS-A 16 in computational complexity. Extensive experiments in AVC were conducted to compare VSSLMS-New with the abovementioned three VSSLMS algorithms.
Performance analysis of VSSLMS-New algorithm
A block diagram illustrating the LMS algorithm in adaptive process is presented in Figure 1, where 


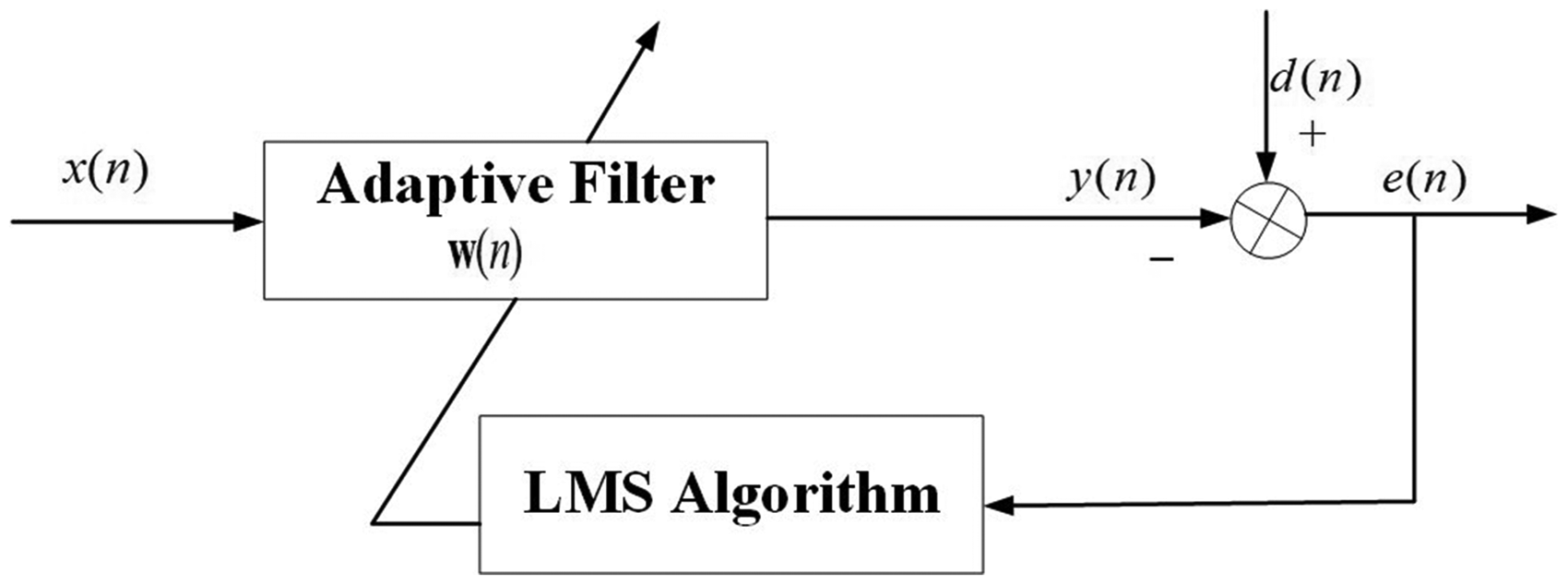
Structure of adaptive filter with LMS algorithm.
In the adaptive process, the updated equation of adaptive filter 
The autocorrelation matrix of
Residual error 



Mean behavior of the weight vector
According the updated equation of the VSSLMS-New, submitting equations (7) to (10) in equation (6), results in

Then, the estimation of 
The estimation of 
Equation (13) is stable if and only if

Accordingly, a sufficient condition for the convergence of the weight vector mean is

MSE
The definition of MSE is given in Widrow et al.
30


According to equations (4) and (5), the mean and mean-square behavior of the step-size 

Steady-state misadjustment
In this analysis, we assumed that the algorithm has converged. Therefore, the samples of the error 

When the parameters satisfied equation (21), we can obtain equation (22) by using equations (16) and (17) in equation (20).

Recall that



We can assume that 


From equations (21) and (26), a sufficient condition on parameters 
Substituting equation (26) in equation (22), we have

In the event of small values of misadjustment so that 

In a stationary environment, 
Experimental system
In this paper, an AVC experimental system of flexible piezoelectric cantilever beam was established. To better illustrate the functionality of each component, a schematic of the experimental setup is presented in Figure 2. There are six piezoelectric patches on the cantilever beam. Two of them are used as sensors to measure the vibration. The one near the cantilevered base is called as reference sensor, and the one near the free end is called as error sensor. The other four are used as actuators. To strengthen the output of the actuators, every two piezoelectric patches are bonded on both sides of the beam at the same location. The group closer to the cantilevered base is called as the disturbance actuator and the other group is called as the suppression actuator.
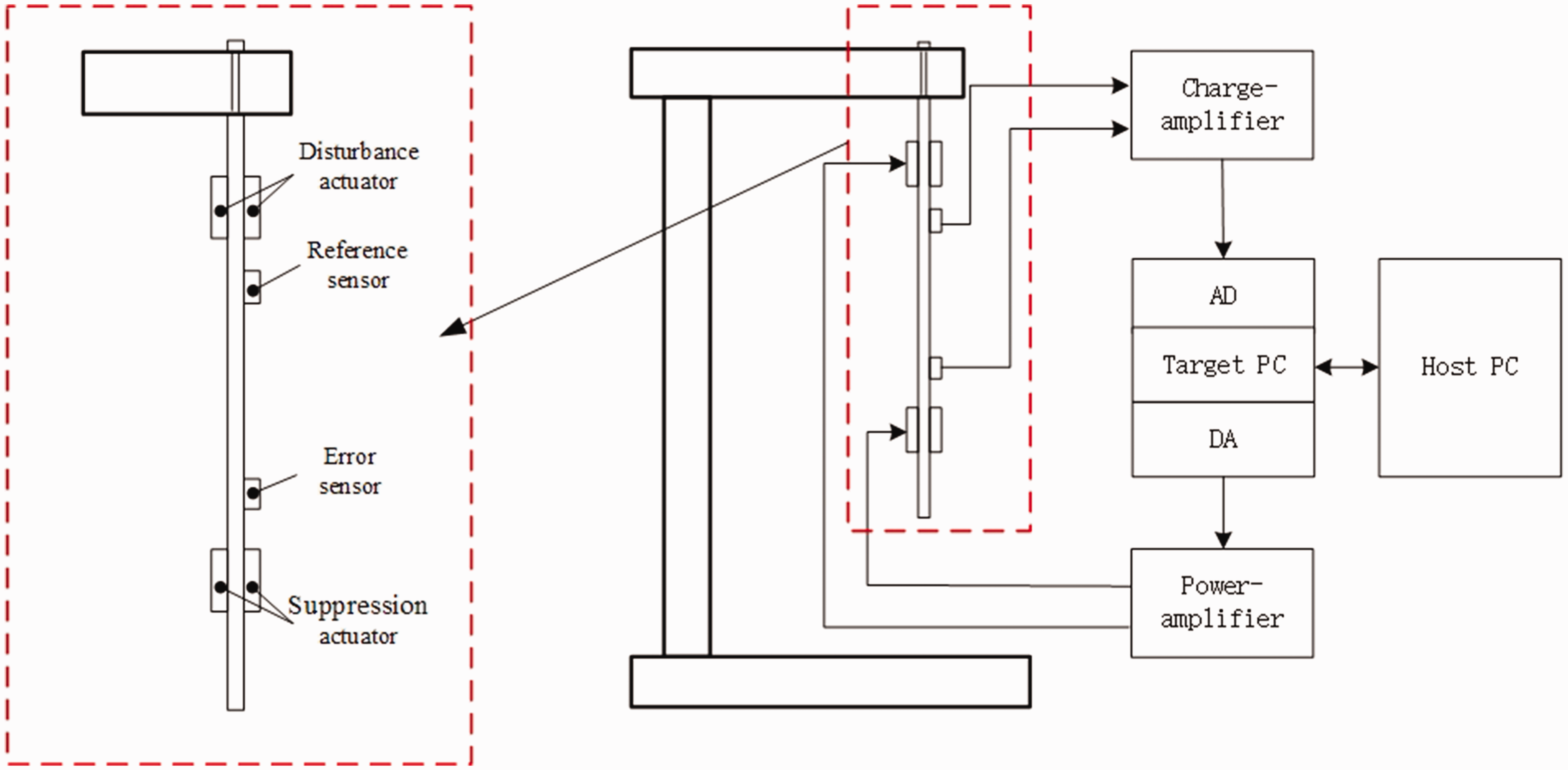
Block diagram of cantilever beam experimental system.
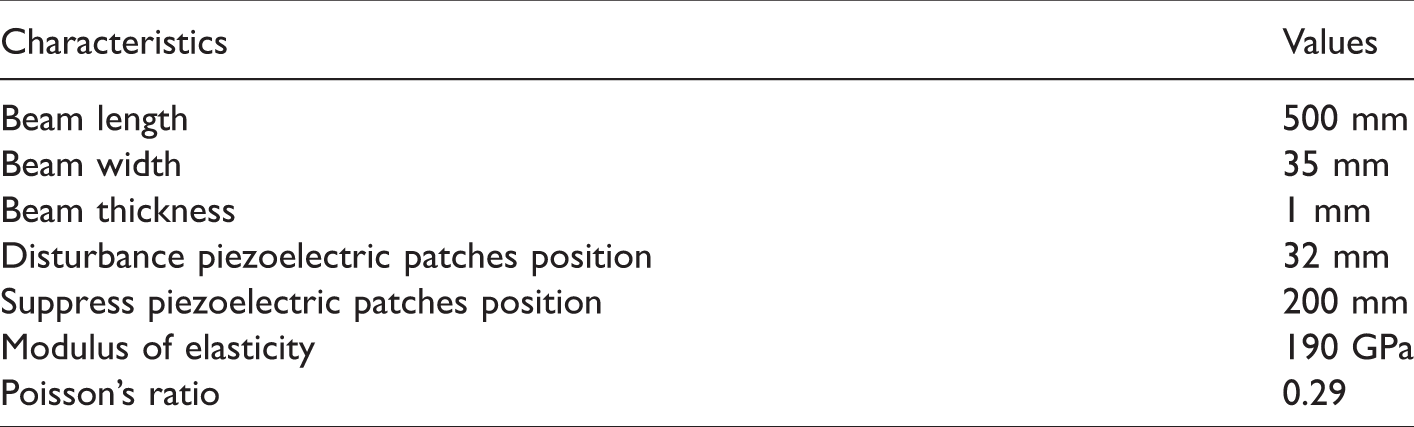
The sketch of flexible cantilever beam is shown in Figure 2, and the parameters of the beam are given in Table 2.
Parameters of the cantilever beam.
By using the Real-Time Workshop Toolbox in SIMULINK, two industrial computers (ACP-4020, Advantech©) are combined as target PC and host PC, respectively. A DAQ card (PCI-6289, NI©) is used for data collection and implementation of control algorithms. The control signal with 0 V–10 V is amplified to 0 V–300 V by the piezoelectric power amplifier (E00.A4, XMT©). And the piezoelectric actuator is used to suppress the vibration. The sensor signals are amplified by the charge-amplifier (YE5852A, SINOCERA©). The picture of experimental system is shown in Figure 3.
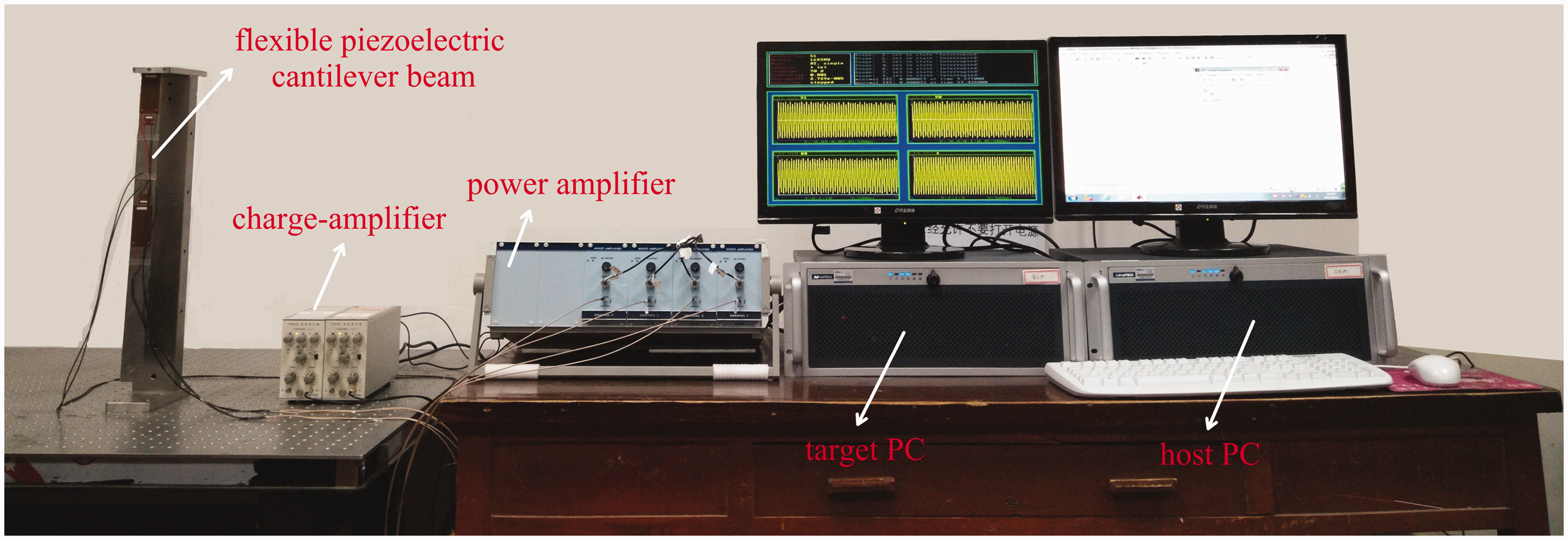
Picture of AVC experimental system.
Experimental results
A sine signal with a resonance frequency of 20.53 Hz and amplitude of 4 V was used as the disturbance to excite vibration of the beam. To compare the performance of VSSLMS algorithms confronting noise, the sine signals were embedded in a white noise with variances 10−2 and 10−1. The sampling frequency
As shown in Figure 4, VSSLMS-New was implemented in the filtered-x structure AVC system. The estimation of secondary path
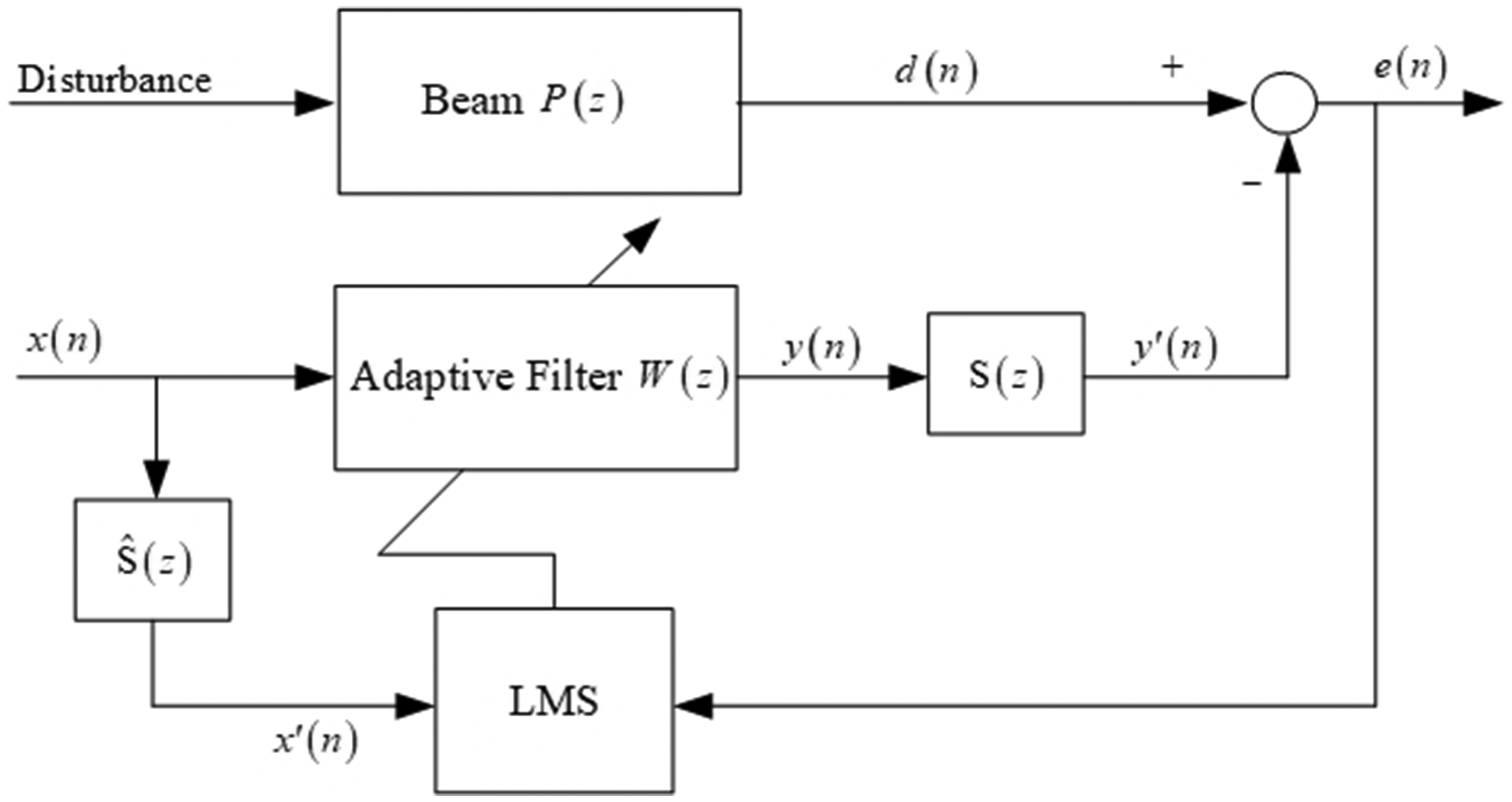
Block diagram of Fx-LMS algorithm in feed-forward AVC system.
It should be noted that the VSSLMS algorithms had to be readjusted when switching from the wideband noise variance 10−2 to 10−1. The values of user parameters are shown in Table 3. The initial step size of all the VSSLMS algorithms are the same as that of the conventional LMS algorithm, such that all algorithms present similar initial convergence. And the maximum and minimum of the step size of all the VSSLMS algorithms if they need are all set a same value.
The values of parameters in experiments.
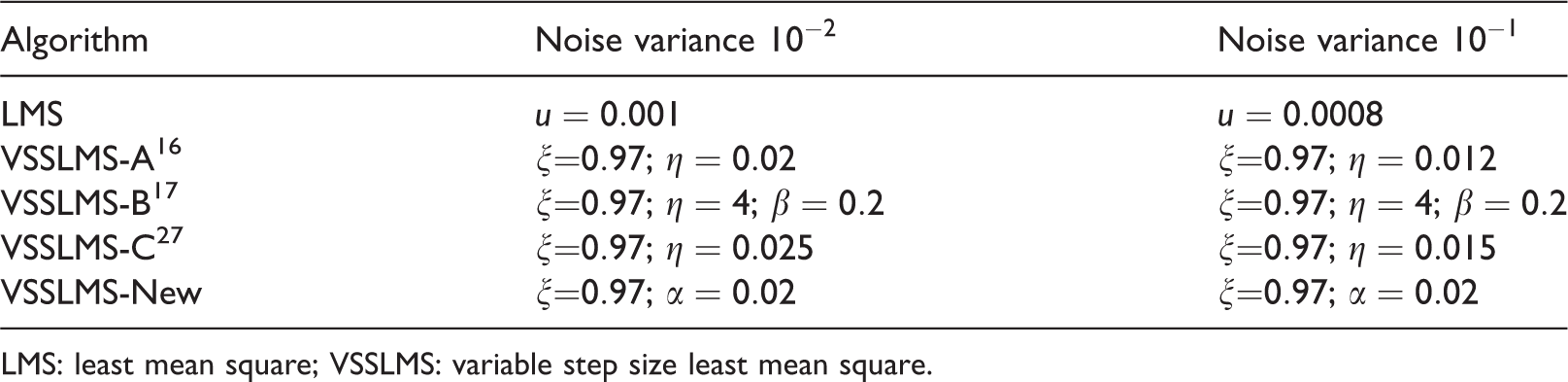
LMS: least mean square; VSSLMS: variable step size least mean square.
Performance comparison was made in terms of total MSE and final MSE. The total MSE is the sum of MSE during the whole experiment. It can manifest the overall performance of the algorithm, including the convergence speed and the resulting MSE. The final MSE is the MSE obtained during the steady state. The results of the experiments of AVC are presented in Table 4 after averaging 200 individual runs. Figure 5 presents the comparison of MSE of various VSSLMS algorithms in AVC experiments.
Results of active vibration control experiments.
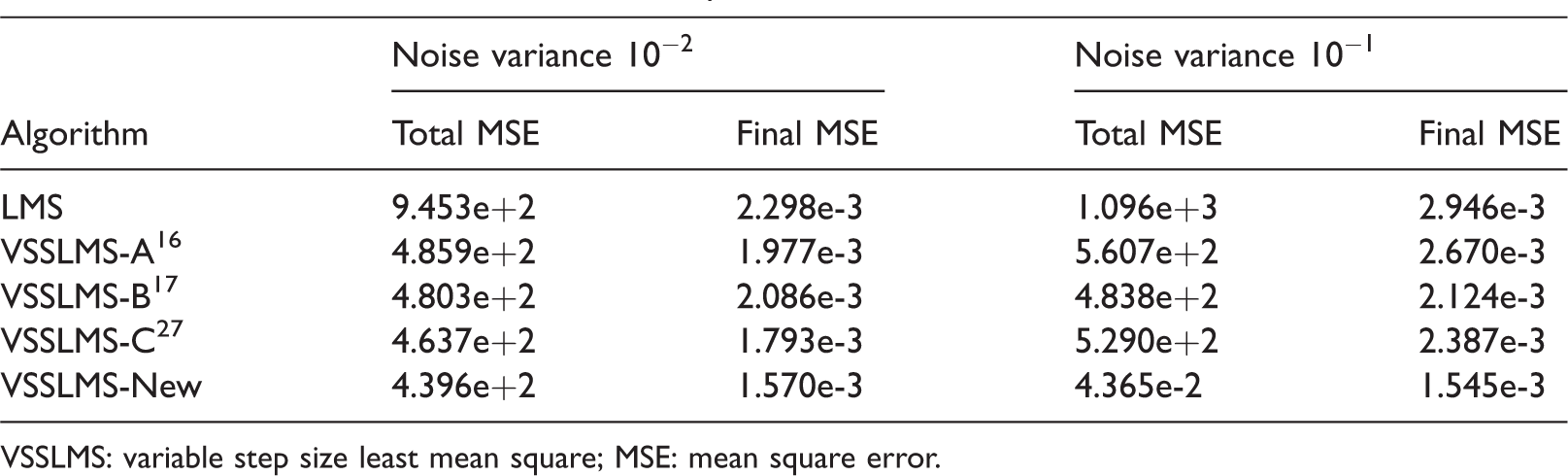
VSSLMS: variable step size least mean square; MSE: mean square error.
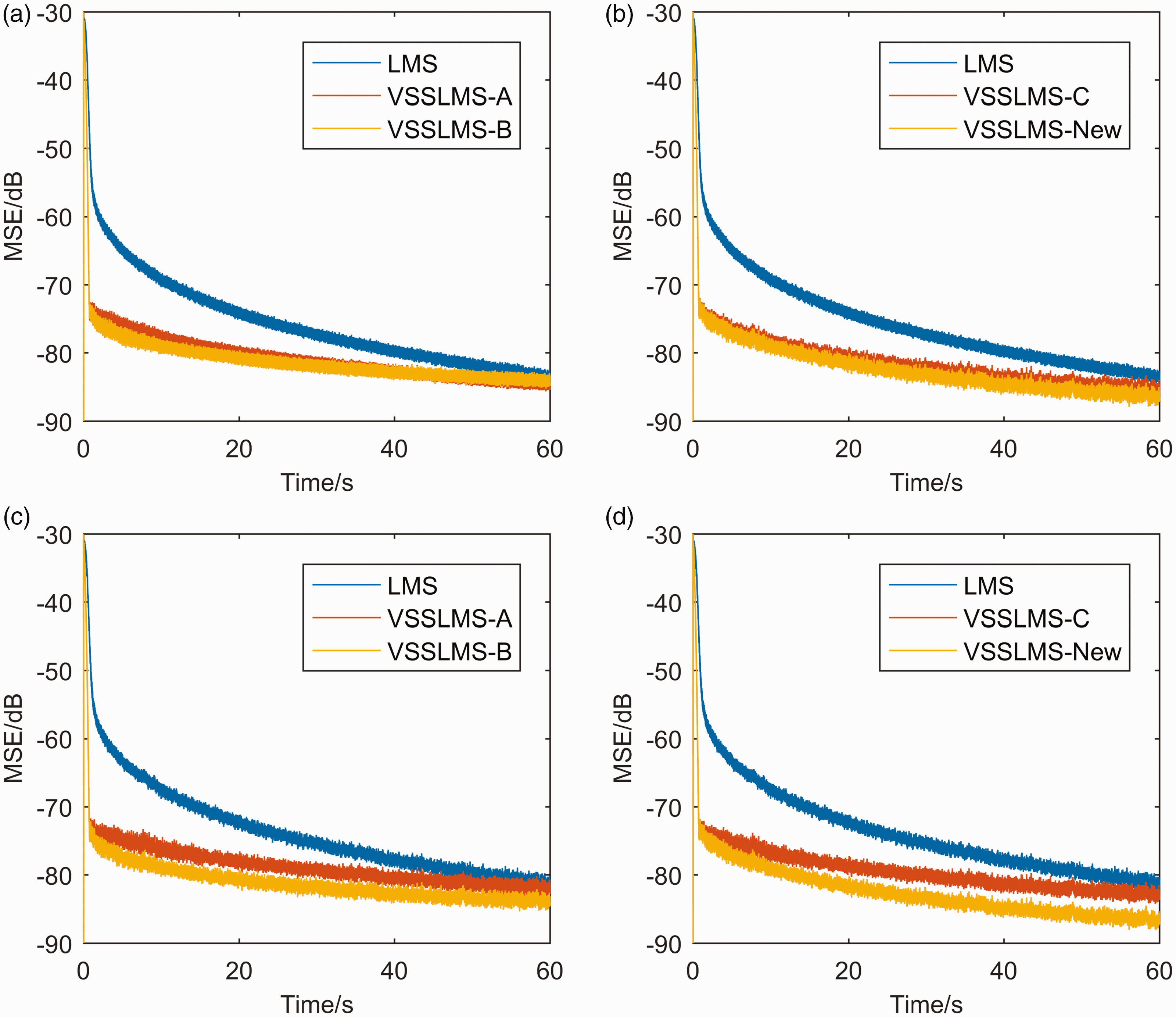
Comparison of MSE among LMS, VSSLMS-A, VSSLMS-B, VSSLMS-C and VSSLMS-New for different noise levels. (a) Part1: small noise level (
From Table 4, Figure 5, and numerous unpresented experimental results, it can be concluded that all the control algorithms can suppress the vibration effectively. All the VSSLMS algorithms have a better performance than conventional LMS algorithm both in small and large noise level at the expense of higher computational cost.
Overall, the VSSLMS-B and the VSSLMS-C present almost the same performance in small noise level (
The VSSLMS-New algorithm provides slightly better MSE than the other VSSLMS algorithms in small additive noise environment. Fortunately, it obtained a faster convergence speed and an obviously lower MSE than other VSSLMS algorithms in large additive noise environment.
As the VSSLMS-New and VSSLMS-A have a similar form, two sets of the same user parameters were used in different noise levels for further comparison. Figure 6(a) and (b) shows the MSE among VSSLMS-A algorithm and VSSLMS-New in small noise level (
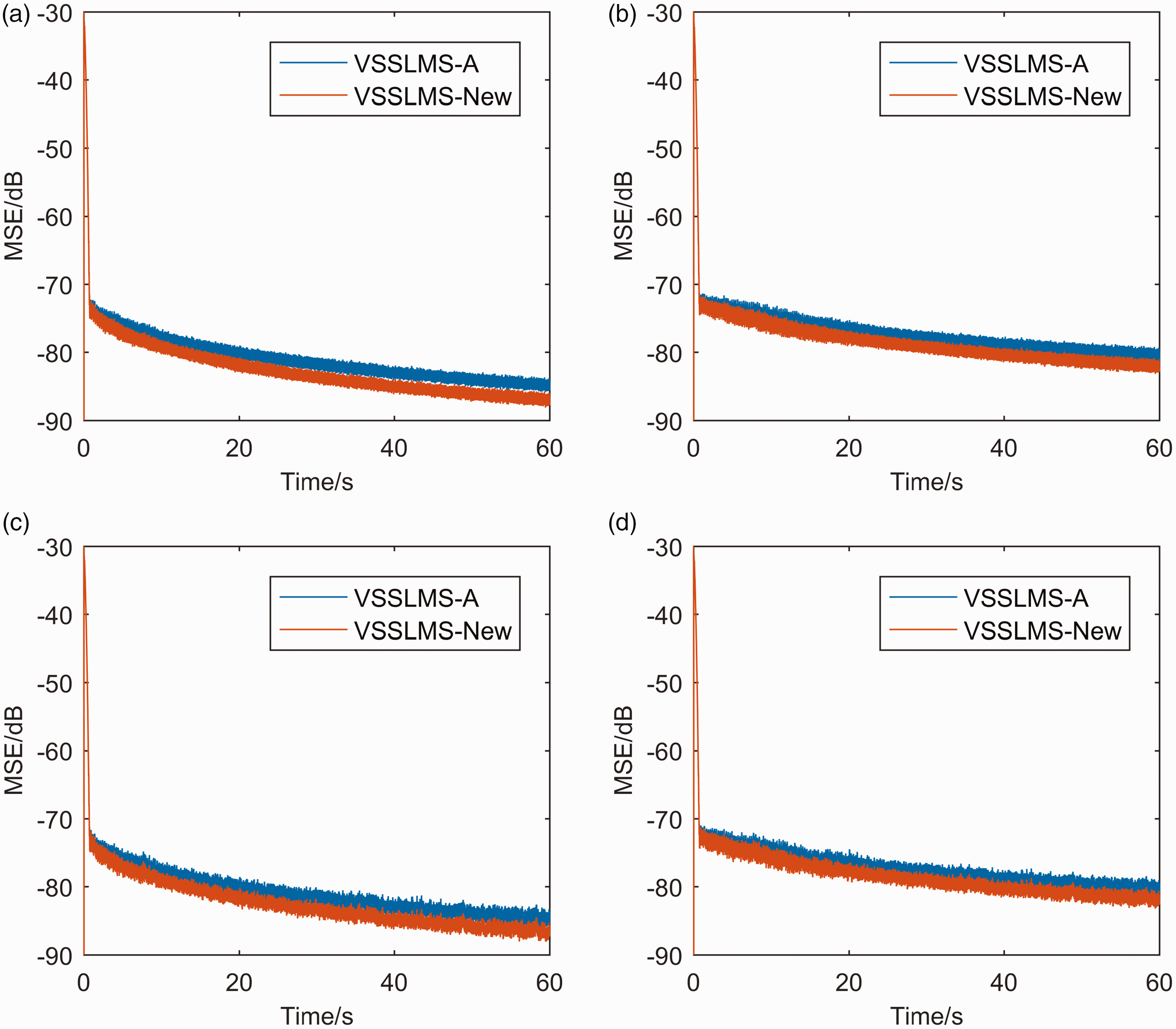
Comparison of MSE among VSSLMS-A and VSSLMS-New with the same parameters in different noise levels (200 runs). (a) Noise
Conclusion
A new VSSLMS algorithm was proposed for AVC of piezoelectric cantilever beam. The new algorithm has a user parameter which varies by the instantaneous error instead of a constant. As a result, the algorithm can effectively isolate the influence of noise on step size. Approximate theoretical analysis for the dynamic and steady-state behavior of the new algorithm was derived. By an AVC experimental system of the flexible beam, the performance of the proposed algorithm was compared with the conventional LMS algorithm 35 as well as other VSSLMS algorithms16,17,27 through experiments. The results show that the proposed algorithm has better robustness to noise both in high and low noise levels compared with the other VSSLMS algorithms.
Footnotes
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/ or publication of this article: The project was supported by National Natural Science Foundation of China (Grant Nos. 51575328, 61503232), “Chen Guang” project supported by Shanghai Municipal Education Commission and Shanghai Education Development Foundation (No. 15CG44).