
Abstract
Accurate and efficient load frequency control in interconnected multiarea power systems is becoming increasingly challenging due to data quantization effects and communication resource limitations. To overcome these limitations, this paper proposes a dual-channel dynamic event-triggered, data-driven load frequency control strategy based on model-free adaptive control. The controller integrates proportional, differential, and quadratic difference terms to enhance tracking accuracy, while independently designed event-triggering mechanisms for both input and output channels significantly reduce communication and computational burdens. Furthermore, a novel encoding–decoding scheme is designed to mitigate data quantization. Rigorous theoretical analysis confirms that the proposed scheme relies solely on input–output data and ensures asymptotic tracking performance. Extensive simulation results validate the effectiveness and feasibility of the proposed quantized control strategy.
Keywords
Introduction
The frequency of electrical loads is a critical indicator of power system stability, where deviations can lead to severe consequences such as equipment damage and even large-scale failures. 1 To mitigate these risks, load frequency control (LFC) has emerged as a central mechanism for maintaining reliable and efficient power system operation amid load fluctuations. 2 Numerous model-based LFC approaches have been developed, including fuzzy control,3–5 model predictive control,6–9 and sliding mode control.10–12 These methods are effective when power system dynamics are relatively simple and can be accurately modeled. However, with the growing complexity and nonlinearity of modern power systems due to advancements in the energy field, the effectiveness of model-based techniques becomes limited. 13 Consequently, the development of model-free LFC strategies has become increasingly important. 14
In recent years, data-driven control—which relies solely on system input and output data for controller design—has garnered significant attention.15–17 Based on the mode of data utilization, data-driven control can be broadly categorized into two main approaches: (1) methods that primarily use online data, such as model-free adaptive control (MFAC)18–21; and (2) methods that rely on offline data, including virtual reference feedback tuning22,23 and iterative feedback tuning.24,25 Among these, MFAC is a prominent online method that employs pseudo-partial derivatives (PPD) to construct a dynamic linearization model between the input and output data of nonlinear systems. Compared to offline methods, MFAC features a simpler structure and requires fewer parameters. 26 However, the MFAC controllers in the aforementioned studies rely exclusively on the current system state, neglecting the differential and quadratic difference information contained in historical data, which reflects short-term dynamics and higher-order output variations. This limitation motivates the development of an enhanced MFAC controller that fully leverages such information to improve control performance.
With the advancement of smart grids, the deployment of remote terminal units has become increasingly widespread. 27 In recent years, the issue of limited communication resources in power networks has garnered considerable scholarly attention. 28 Event-triggered mechanisms have been extensively studied in networked control systems due to their ability to transmit signals only when predefined conditions are met, thereby reducing unnecessary data transmission.29–31 Building on this concept, Chen et al. 32 proposed a dynamic event-triggered mechanism that adaptively adjusts triggering conditions based on the magnitude of the control error, further minimizing communication frequency. Compared to static and switching event-triggered mechanisms, dynamic event-triggered approaches provide enhanced control performance and improved resource utilization. Nevertheless, most existing and above studies predominantly emphasize the input channel while overlooking the role of the output channel. Consequently, developing a dynamic event-triggered MFAC strategy that simultaneously addresses both input and output channels in power systems remains a critical yet unresolved challenge.
On the other hand, measurement data must be quantized before being transmitted through power networks, which reduces the volume of transmitted data but introduces quantization errors between the actual signals and their quantized representations. 33 These quantization errors can degrade control performance and, in some cases, compromise the stability of the control system. To date, two primary quantization schemes have been widely studied: static quantization34,35 and dynamic quantization.36,37 Feng et al. 38 investigated the influence of quantized communication data rates on control performance and found that the tracking error converges to a finite bound rather than zero. Motivated by this limitation, we propose the design of an encoding–decoding mechanism that achieves zero tracking error under a commonly used uniform quantizer.
This paper investigates the LFC problem in uncertain multiarea power systems subject to uniform quantization. To reduce the communication frequency on both input and output channels, a dual-channel dynamic event-triggered (DDET) data-driven LFC approach is proposed. Additionally, an encoding–decoding mechanism is designed to mitigate the adverse effects of data quantization. The main contributions of this study are summarized as follows:
We develop a novel model-free data-driven LFC scheme for interconnected multiarea power systems that completely eliminates the dependence on precise system models. Compared to existing MFAC-based approaches,19,20 our controller uniquely integrates proportional, differential, and quadratic difference terms, significantly improving control accuracy and dynamic response. We propose a DDET control strategy that independently designs triggering conditions for both input and output channels. This asynchronous triggering mechanism differs from traditional synchronous event-triggered methods31,32 by reducing communication load more effectively without compromising stability or performance. To tackle the challenges of data quantization in communication channels, we introduce an innovative encoding–decoding mechanism. Unlike prior works,36,37 which assume known system models or focus on single-channel quantization, our approach is fully data-driven and handles quantization effects in both input and output signals.
The remainder of this paper is organized as follows. The second section formulates the control problem. The third section presents the proposed DDET data-driven LFC strategy, incorporating the encoding–decoding mechanism. The fourth section provides the stability analysis. The penultimate section demonstrates and discusses the simulation results. Finally, the last section concludes the paper.
Preliminary and problem description
Referring to Bu et al.
20
and Shangguan et al.
27
, the dynamic model of

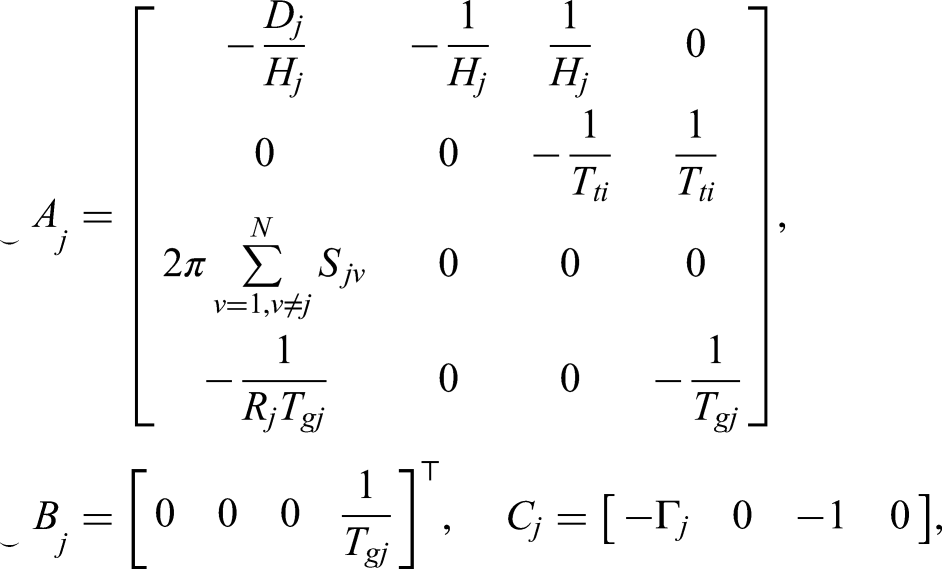

Block diagram of
The physical meaning of all the parameters in the above equation is shown in Table 1. Based on the Euler approximation law with sampling period T, the discrete-time model of

Signals of the j area system.

The objective of the control problem is to design an event-triggered data-driven controller for power system (2) such that the area control error 
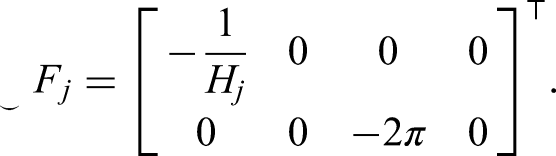
Function curve of
In this article, matrices
The choice of the quantization density parameter
Design of DDET-quantized MFAC scheme
In this section, a DDET-quantized MFAC scheme, as shown in Figure 3 and Algorithm 1, is designed.

System block diagram of the DDET-quantized MFAC scheme. DDET: dual-channel dynamic event-triggered; MFAC: model-free adaptive control.
Data-driven control algorithm
The area control error signal of 

Furthermore, 
The partial derivative of
(Qiu et al.,
19
Bu et al.
20
). Nonlinear system (6) satisfies the generalized Lipschitz condition, that is, for any 
(Qiu et al.,
19
Bu et al.
20
). Under Assumptions 1 and 2, when 
To design the data-driven LFC algorithm, the linearization data model in Lemma 1 is rewritten as follows:
Consider the following criterion function of the control input 
Substitute equation (9) into the criterion function and set the derivative of the criterion function with respect to 
It is worthwhile to note that the above control algorithm only utilizes the error information at instant k, which inspires us to further consider the impact of multistep historical error information. Consequently, the improved control algorithm is designed as
To implement control algorithm (12), the value of PPD 



Clearly, equations (14) and (15) do not incorporate any model information, where they rely solely on system output data and control input data. Furthermore, internal state information, such as
Dual-channel dynamic event-triggered mechanism
The design of dynamic thresholds plays a critical role in the event-triggered mechanism. Generally, the triggering threshold should meet the following criteria: when the control input or triggering error exhibits a large magnitude, the threshold should increase accordingly to extend triggering intervals, thereby alleviating communication congestion caused by excessive events. Conversely, when the control input or triggering error is small, the threshold should be reduced to increase the triggering frequency, ensuring the elimination of steady-state errors. Based on the above analysis, the input triggering conditions are designed as follows:

Further, the output triggering conditions are designed as follows:


The results in Feng et al. 38 have shown that data quantization in equation (16) can lead to a decrease in the system's tracking performance, which motivates us to design an encoding–decoding mechanism to compensate for the influence of data quantization.
Encoding–decoding mechanism
To mitigate the effects of data quantization, data needs to be encoded before transmission over the network. The output of the designed encoder is

Then, the corresponding decoder can be designed as


Thus, equation (25) can be rewritten as
Finally, the quantized DDET data-driven LFC algorithm can be designed as


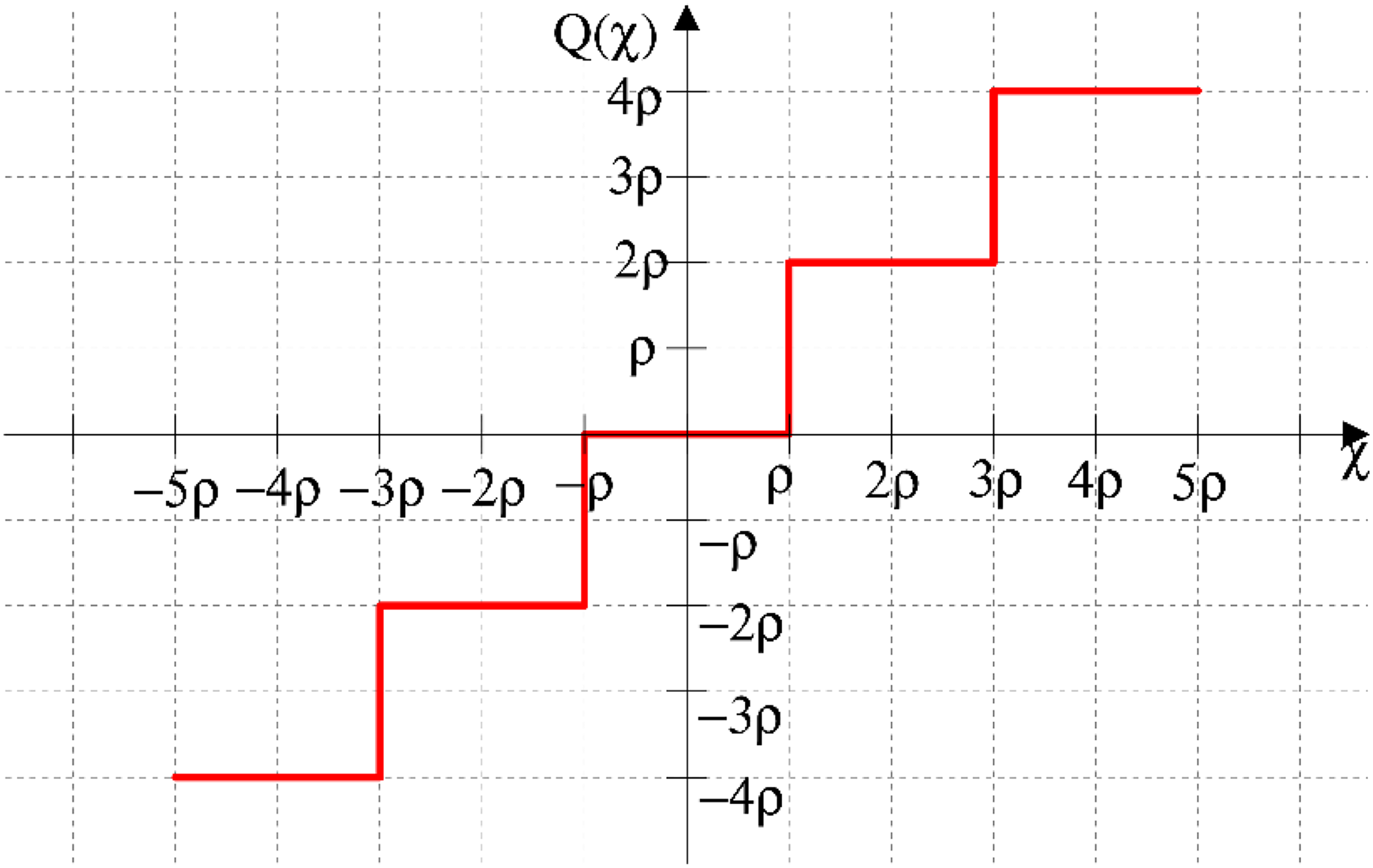
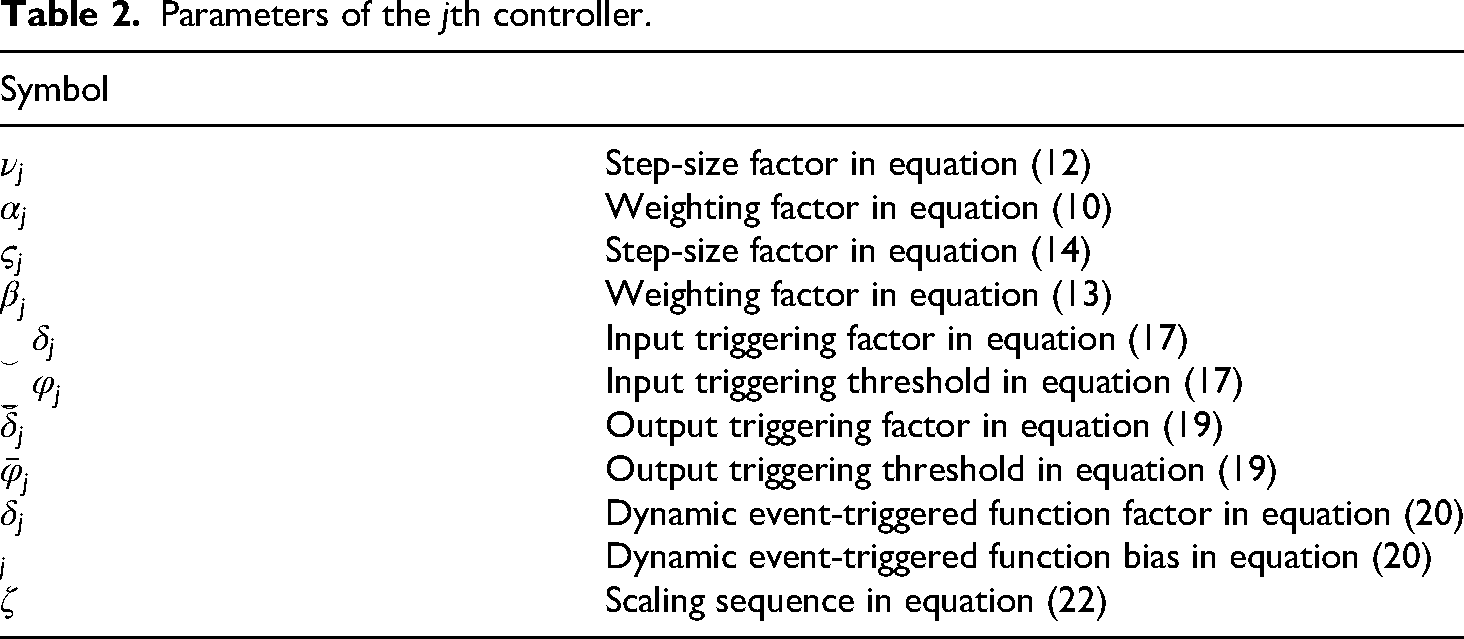
The nomenclature of all parameters involved in the proposed Algorithm 1 is provided in Table 2.
Parameters of the
Data-driven dual-channel dynamic event-triggered load frequency control algorithm.

Stability analysis
This section studies the stabilization and convergence of the multiarea interconnected power systems.
For system (6), the proposed DDET data-driven LFC scheme with input design-based compensation can guarantee the boundedness of system signals for
The estimation error
The dynamic event-triggered function
The area control error
Proof: The boundedness of
Part 1: When 


From Lemma 1, we have 
If the choice of 
Considering the boundedness of
For
Part 2: Now we prove the boundedness of 
When 
Part 3: Now we prove the boundedness of 

Then, one has
If we satisfy 
Thus, there exists 
For
According to the stability analysis, the controller parameters must satisfy specific conditions to ensure the convergence of the tracking error. These conditions also provide practical guidelines for parameter tuning:
Choose Ensure Choose Select a monotonically decreasing sequence
Simulation results
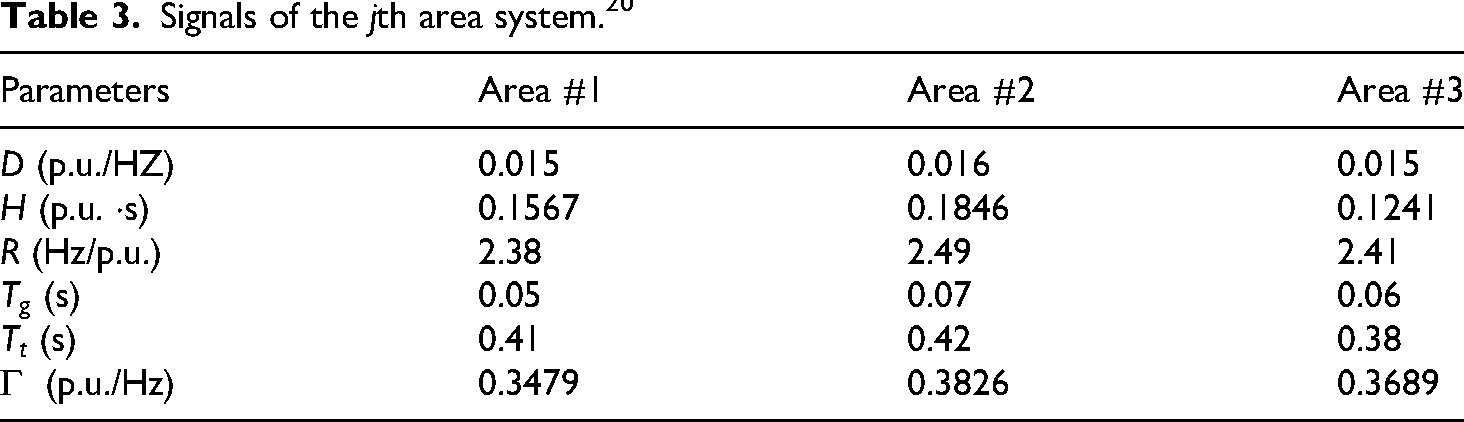
This section verifies the effectiveness of the proposed strategy in three interconnected power systems, as shown in Figure 4. Table 3 presents the selected system parameter values. Moreover, the sampling period is 0.005 s,

Three-area power system.
Signals of the jth area system. 20
Case I
In this section, we demonstrate the control effectiveness of the proposed DDET data-driven LFC method and its ability to save communication resources under step load disturbances. The controller parameters are shown in Table 4. According to stability analysis, it is noted that the setting value of the controller parameters must meet the following conditions, as stated in Remark 4. Other parameters are adjusted according to the actual control performance. The power system's initial states are set to zero, and 0.03 p.u. load step disturbances are added 10 s later.
Controller parameters of the jth area system.

Figures 5 to 7 depict the output responses of frequency deviation

Response of

Response of

Response of

Response of
As illustrated in Figures 9 and 10, the horizontal axis denotes the triggering instants, while the vertical axis represents the corresponding intertriggering intervals. The proposed DDET mechanism initiates 2478, 2123, and 2445 triggering events in the input channels, and 1607, 1505, and 1535 events in the output channels, respectively—resulting in an overall communication resource savings of 83.76%. These results clearly demonstrate that the proposed DDET strategy can significantly reduce communication load while maintaining effective control performance.

Triggering instants and intervals in input channels (case I).

Triggering instants and intervals in output channels (case I).
Case II
In this section, a dynamic load disturbance, defined as
In Figures 11 to 13, the output curves of

Response of

Response of

Response of
As shown in Figures 14 and 15, the proposed DDET mechanism activates 7072, 5550, and 7132 times in the input channels, and 5189, 3654, and 5222 times in the output channels, making 53.03% reduction in communication resource usage. Compared with case I, the total trigger number has significantly increased, primarily due to the higher control frequency caused by the dynamic load disturbances.

Triggering instants and intervals in input channels (case II).

Triggering instants and intervals in output channels (case II).
Sensitivity analysis
In this section, we present the effect of different parameters on the control performance.
In Figure 16, the frequency deviation is plotted for different controller parameters in equation (12). Table 5 lists five standard performance criteria: overshoot (OS), regulation time (RT), steady-state error (SSE), integral of absolute error (IAE), and integral of time-weighted absolute error (ITAE) to assess control performance. The results indicate that both

Response of
Performance comparison between different parameters (

OS: overshoot; RT: regulation time; SSE: steady-state error; IAE: integral of absolute error; ITAE: integral of time-weighted absolute error. The optimal values are highlighted in bold.
In Figure 17, the frequency deviation is plotted for different triggering parameters in equation (19). Table 6 shows that

Response of
Performance comparison between different parameters (

OS: overshoot; RT: regulation time; SSE: steady-state error; ITAE: integral of time-weighted absolute error. The optimal values are highlighted in bold.
In Figure 18, the frequency deviations corresponding to various controller parameters 

Response of
Performance comparison between different parameters (

OS: overshoot; RT: regulation time; SSE: steady-state error; IAE: integral of absolute error; ITAE: integral of time-weighted absolute error. The optimal values are highlighted in bold.
The results show that the proposed method achieves superior control performance, attributed to the integration of proportional, differential, and quadratic difference terms in the control law defined by equation (12).
Figure 19 illustrates the frequency deviations under different quantization densities

Response of
Performance comparison between different parameter

OS: overshoot; RT: regulation time; SSE: steady-state error; IAE: integral of absolute error; ITAE: integral of time-weighted absolute error. The optimal values are highlighted in bold.
Conclusion
This paper presented a data-driven LFC approach for multiarea interconnected power systems. A DDET mechanism, along with an encoding–decoding scheme, is developed to optimize resource efficiency and mitigate the effects of data quantization. The effectiveness of the proposed algorithm is demonstrated through extensive simulations, and the impact of various parameters on control performance is thoroughly analyzed. Future research will focus on exploring prescribed-time LFC strategies for uncertain multiarea interconnected wind power systems with the virtual inertia control system subject to multiple cyber-attacks, which remains a significant challenge.
Footnotes
Funding
The authors disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This paper is the results of the research project funded by the National Natural Science Foundation of China under Grant 62403216, in part by the Basic Research Program of Jiangsu Province under Grant BK20241608, in part by the Jiangsu Province Young Science and Technology Talent Support Program under Grant JSTJ-2025-544, in part by the JSPS KAKENHI under Grant JP25K01453, in part by the Wuxi Young Science and Technology Talent Support Program under Grant TJXD-2024-11, in part by the Wuxi Science and Technology Development Fund Project under Grant K20231015, and in part by the 111 project under Grant B23008.
Declaration of conflicting interests
The authors declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.