
Abstract
To solve the time-delay problem and actuator saturation problem of nonlinear plants in industrial processes, an improved compact-form antisaturation model-free adaptive control (ICF-AS-MFAC) method is proposed in this work. The ICF-AS-MFAC scheme is based on the concept of the pseudo partial derivative (PPD) and adopts equivalent dynamic linearization technology. Then, a tracking differentiator is used to predict the future output of a time-delay system to effectively control the system. Additionally, the concept of the saturation parameter is proposed, and the ICF-AS-MFAC controller is designed to ensure that the control system will not exhibit actuator saturation. The proposed algorithm is more flexible, has faster output responses for time-delay systems, and solves the problem of actuator saturation. The convergence and stability of the proposed method are rigorously proven mathematically. The effectiveness of the proposed method is verified by numerical simulations, and the applicability of the proposed method is verified by a series of experimental results based on double tanks.
Keywords
Introduction
Computer technology has rapidly developed since the 1950s, and advanced control theory has greatly advanced in recent years. Advanced control theory can generally be divided into two control methods: data-based or data-driven control (DDC) and model-based control.1,2 Because most industrial processes are complex (nonlinear, high-order, etc.), it is difficult to obtain a precise kinetic model3,4; with the rapid development of computing speed, the DDC method, a control and optimization method based on collected data, is playing an increasingly important role in the modern industrial field. At present, the DDC method has been widely used in industrial fields.
The main DDC methods include the iterative method,5–7 the virtual reference feedback tuning (VRFT) method, 8 adaptive dynamic programming,9–13 the lazy learning (LL) control method, 3 and the model-free adaptive control (MFAC) method. 14 Among them, the MFAC method has the advantages of good robustness and low computation. MFAC has been studied in recent years by some scholars and is widely used in industry, such as in autopilot excavators 15 and four-rotor aircraft. 16 In addition, the MFAC method has been used to address sliding mode control, 17 formation control, 18 predictive control, 19 iterative learning control, 20 and other problems in nonlinear systems.1,21
However, most modern industrial systems have time delays, such as permanent-magnet synchronous-motor-position servo systems 22 and cement calciner outlet temperature systems. 23 The problem of time delay often leads to deterioration of control system performance and even disruption of system stability, increasing the difficulty of controller design for the controlled object. The MFAC method cannot produce an ideal control effect for time-delay systems, and ideal control performance is difficult to achieve. At the same time, some control systems cannot reach the expected value quickly, which leads to a large number of errors in the control process of the MFAC algorithm. This will lead to actuator saturation, which will cause a large overshoot and impact the control effect.
In order to achieve ideal control effect for nonlinear systems with large time delay and effectively solve actuator saturation problem, this article proposes an improved compact-form antisaturation model-free adaptive control (ICF-AS-MFAC) method. By introducing the concept of saturation parameter, Smith prediction technology, and tracking differentiator, the proposed algorithm can effectively handle actuator saturation and time delay problems. The contributions of this article are as follows:
The article introduces a compact form dynamic linearization (CFDL) method and dynamically linearizes the studied nonlinear system. Based on the dynamic linearization model, this paper proposes the concept of saturation parameter, which is introduced into the controller criterion function to enable the algorithm to effectively handle the problem of actuator saturation. Based on the introduction of antisaturation, the article introduces the control of differential term into the controller, adopts Smith prediction technology and tracking differentiator, and proposes ICF-AS-MFAC algorithm, which makes the proposed control method can effectively solve the time-delay problem and actuator saturation problem of nonlinear systems. Through rigorous Mathematical analysis, the stability and convergence of ICF-AS-MFAC method are verified. Conduct a series of numerical simulations and physical dual tank experiments. The ICF-AS-MFAC algorithm was applied to the simulation system and its applicability was verified through several simulation experimental results.
The outline of this article is as follows. The next section introduces the ICF-MFAC control strategy and proves the algorithm convergence. Numerical simulations and semiphysical experiments are presented in the sections “Numerical simulations” and “Double-tank experiments.” The conclusions are given in the last section.
ICF-AS-MFAC algorithm
Dynamic linearization of a nonlinear system
Consider a single-input and single-output (SISO) system that is nonlinear and time-delayed. The system can be expressed as follows.

The system (1) input is measurable and controllable; which means, for a series of uniformly bounded expected output signals
The system partial derivatives described in (1) for outputs are continuous.
System (1) satisfies the general Lipschitz
24
criteria, which means that for any time i and

According to reference,
25
under Assumptions 1, 2 and 3, there must be a time-varying parameter

See Appendix A.
Remark 1: The dynamic linearization method proposed in this article has essential differences from other linearization methods such as Feedback linearization, 26 Taylor linearization, 27 piecewise linearization, 28 etc. Firstly, the generation of PPD is not dependent on the structure and parameters of the original system, but only on the I/O data generated by the system. Secondly, the dynamic linearization data model provides a direct mapping relationship between the control input signal increment and the system output signal increment, which is a linearization method aimed at control system design. At the same time, all possible complex behavior characteristics in the original dynamic nonlinear system, such as nonlinearity, time-varying parameters or time-varying structures, are compressed into PPD, and the numerical behavior of PPD is simple and easy to estimate.
Control system design
Controller design
To ensure that the system achieves desaturation and can complete the control task well in the case of actuator saturation, this paper introduces a parameter called the saturation parameter,

Considering the tracking error, the control input cost function is constructed as follows.



Differential estimation
The structure of the ICF-AS-MFAC method is shown in Figure 1. The delay system transfer function can be expressed by


Schematic diagram of the ICF-AS-MFAC system.
From Equation (8), the differential value of the output signal should be obtained. However, the traditional method of obtaining the differential will amplify the noise of the system. Therefore, this article uses a second-order differentiator to obtain the differential. The second-order tracking differentiator can track the differential signal well without amplifying noise, and the obtained differential signal is smoother.
32
The second-order tracking differentiator is described below.



Remark 2: The delay of the system addressed in this article is assumed to be known. If the exact time delay is unknown, there are two situations. One is that the time delay varies with time, and the time delay
Pseudo partial derivative estimation
The PPD true value exists, and Theorem 1 proves the existence of



As of now, the ICF-AS-MFAC controller has been designed and completed. The controller is summarized in Equation (15) : Step 1: Differential estimation using a second-order differential tracker, Step 2: Estimate PPD based on input and output data, Step 3: Determine whether actuator saturation occurs based on the output of the controller, Step 4: Calculate the input at the next moment based on the saturation of the controller actuator, as well as the differential and output data Step 5: Transfer the calculated input at the next moment to the controlled object, obtain the output value at the next moment, and repeat Step 1.
With the designed controller, the stability of the ICF-ASMFAC method is considered next.
Stability analysis and other discussions
Stability analysis
The tracking output error of the system is convergent, that is, After selecting appropriate values for
See Appendix B.
Discussion
The ICF-AS-MFAC scheme has been designed, and the pseudocode of the ICF-AS-MFAC algorithm is presented in Table 1.
Pseudocode of the ICF-AS-MFAC algorithm.

The flow chart of the controller is shown in Figure 2.

ICF-AS-MFAC flow chart.
Remark 3: Equation (7) shows that when 
Remark 4: There are three forms of model-free adaptive control (MFAC), namely, compact form (CF), partial form (PF), and full form (FF). 25 For complex nonlinear systems, the improved method proposed in this paper can also be applied to PF-MFAC and FF-MFAC.
Remark 5: Compared with other DDC methods such as neural network-based control methods, 34 VRFT, 8 IFT 35 etc., ICF-AS-MFAC has more advantages. Firstly, ICF-AS-MFAC does not require external test signals or training processes, which is necessary for some DDC methods such as neural network-based control methods. Secondly, ICF-AS-MFAC does not require offline data adjustment, while algorithms such as VRFT require this step. Thirdly, there are strict mathematical proofs for the stability and convergence of ICF-AS-MFAC, which are not found in most other DDC algorithms such as PID.
Remark 6: The ICF-AS-MFAC algorithm proposed in this article only uses online data of the controlled object, without offline data of the controlled object. In fact, offline data of controlled objects can also be used reasonably, as described in relevant literature such as reference 34 and. 36 The application of offline data can be added according to the actual situation to increase the control effect of the algorithm.
Remark 7: At present, some papers have studied the delay and actuator saturation issues of MFAC. For example, Reference 37 proposed an IOC-MFAC method for actuator saturation, but this method only limits output saturation and does not further desaturate. Reference 38 proposed a method to resist actuator saturation in MFAC, but this method did not consider the delay problem of the system.
Numerical simulations
This section describes numerical simulations that use MATLAB 2020b to verify the effectiveness of the ICF-ASMFAC algorithm, include the time-delay system simulation and actuator saturation simulation.
Time-delay system simulation
The following third-order inertia delay objects are used in the simulations.

The expected signal is a pulse signal with a period of 2000s, a 50% pulse width and a single amplitude. The simulation parameters are shown in Table 2, and Figures 3 and 4 show the simulation results. The simulation results demonstrate that all three methods can complete control tasks; however, in the case of small overshoot, the ICF-AS-MFAC scheme has the fastest response and better control effects.

The tracking performance of the three algorithms for simulation 1.

The inputs of the three algorithms for simulation 1.
Simulation parameters.

In the ICF-AS-MFAC controller,

The tracking performance of systems with different
Actuator saturation simulation
To test the anti-actuator saturation effect of ICF-AS-MFAC, a second-order system is designed for testing:

The tracking performance of the two algorithms for simulation 2.

The inputs of the two algorithmsn for simulation 2.
As shown in Figures 6 and 7, both control algorithms can quickly reach the expected value. However, when the system encounters external forces and the output value cannot reach the expected value within a certain period of time, the traditional CF-MFAC will have large error accumulation, leading to a serious actuator saturation problem. It can be seen that under the influence of actuator saturation, the input and output values of CF-MFAC have a sudden change, which causes great damage to the controlled object in the actual system. However, ICF-AS-MFAC can rapidly desaturate without incurring the problem of the traditional CF-MFAC that there is a sharp increase in the output due to actuator saturation.
Time-delay and actuator saturation simulation
In order to observe the control effect of the proposed algorithm on systems with both time delay and actuator saturation, equation (17) is still selected as the controlled object for simulation experiments. The expected values of the system are set as follows:

The inputs of the three algorithms for simulation 3.

The tracking performance of the three algorithms for simulation 3.
The experimental results show that compared to CF-MFAC and VRFT algorithms, ICF-AS-MFAC has better control performance in environments with actuator saturation and time delay. The proposed algorithm can effectively handle time delay problems and achieve fast controller dropout.
Double-tank experiments
This section demonstrates the effectiveness of the algorithm through double slot experiments. Scenario 1 demonstrates that the algorithm can effectively complete the level control task of a dual tank, while Scenario 2 demonstrates that even after experiencing external disturbances, the algorithm can still quickly complete the level control task of a dual tank and has good robustness.
Scenario 1
Figure 10(a) and (b) shows the double-tank system equipment. Specifically, water tanks 1–2 are stacked without direct connections. In addition, the pump flow can be regulated by the electric water pump. The maximum flow rate of the water pump is 6000 rmp.

Double-tank liquid level control system. (a) Schematic. (b) Equipment.
The control of the liquid level is a complex unstable nonlinear system. The input is the speed change of the pump, and the output is the second water tank liquid level. The incoming water enters the tank 1 and then flows out of the tank 2. Compared with a single tank, the response of the controlled quantity is one step behind in time due to the addition of the second tank; that is, there is a volume delay, which makes the process difficult to control.
It is worth noting that only the liquid level of water tank 2 is sent to the host computer. In this case, the control process shows delays and high nonlinearity. The task is to maintain the liquid level in tank 2 at 300 ml, as shown in Figure 11.

Schematic diagram of the water tank level change. (a) The liquid level is 50 ml. (b) The liquid level is 200 ml. (c) The liquid level is 300 ml.
Four DDC algorithms were used in these experiments, namely, the conventional PID algorithm, VRFT algorithm, CF-MFAC algorithm and ICF-MFAC algorithm. The simulation time was 400 s.
The PID controller is described in Equation (20), and the PID parameters were set as follows: 
Figures 12, 13, and 14 describe the performance of the four DDC algorithms. Based on the comparison results in Figures 12, 13, and 14, the following conclusions can be obtained:
The convergence effect of PID is good, and it converges to the expected level after approximately 230 s. However, the PID input fluctuates violently during the convergence process, which may damage the controller. Due to its offline tuning scheme, the VRFT controller cannot quickly converge to the desired level. Therefore, the corresponding output converges to 300 ml at approximately 250 s. In addition, compared with the other three methods, the parameter adjustment procedure of the VRFT algorithm is time consuming because many experiments are needed to obtain the required parameters. Both the CF-MFAC and ICF-AS-MFAC schemes can control the water tank level. However, under the control of the CF-MFAC scheme, the level of the dual-capacity water tank becomes stable after approximately 220 s, while the ICF-AS-MFAC algorithm reaches a stable level after approximately 200 s. At the same time, there is a certain delay between the input and output of the water tank, while the traditional MFAC lacks a mechanism to address the system delay. In contrast, the proposed ICF-AS-MFAC method can effectively address the system delay. Therefore, the control effect of the ICF-AS-MFAC algorithm is significantly better than that of the CF-MFAC algorithm in the double water tank and other time-delay systems.

Change in liquid level of lower water tank.

Change in water pump speed.
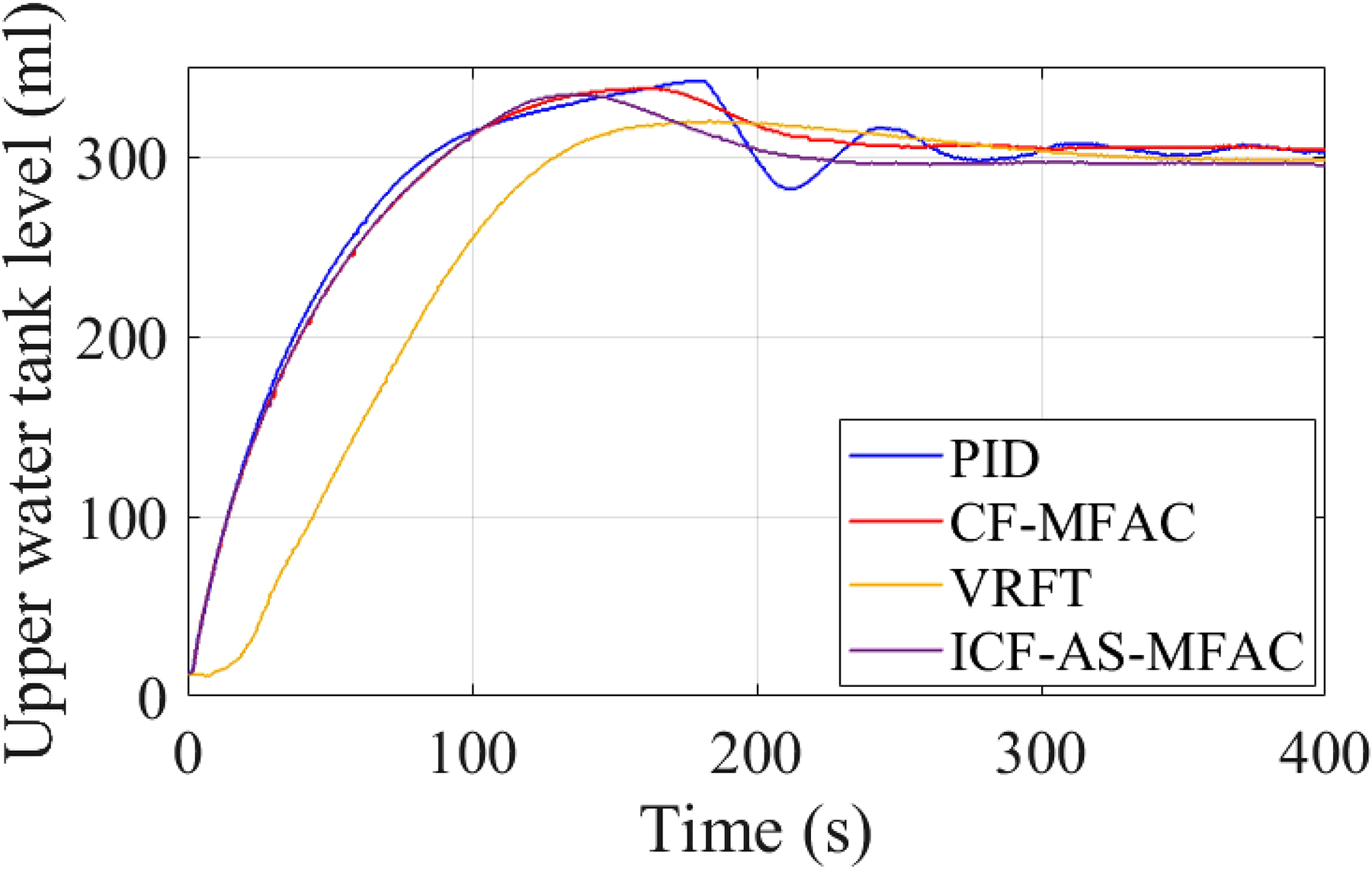
Change in liquid level of upper water tank.
Scenario 2
The controlled object and selected control algorithm in Scenario 2 are no different from Scenario 1, and the selection of parameters is also completely consistent. It is worth noting that at the 350th second, 50 ml of water will be injected into the upper water tank to cause disturbance and observe the control effects of the four algorithms under disturbance conditions. The control results of the four algorithms are shown in Figures 15, 16, and 17, and the following conclusions can be drawn.

Change in liquid level of lower water tank after adding water.

Change in pump speed after adding water.

Change in liquid level of upper water tank after adding water.
Compared to the original algorithm, the robustness of ICF-AS-MFAC has also been improved to a certain extent. In the experiment, after being disturbed, ICF-AS-MFAC can quickly restore normal control and achieve the expected water level. The proposed algorithm has good resistance to disturbance and robustness.
In summary, for large time-delay systems similar to double tank systems, the ICF-AS-MFAC scheme proposed in this paper has better control performance than the other three control methods, and there is no serious actuator saturation problem. It should be noted that the ICF-AS-MFAC method is easy to implement, and the entire control process does not use an accurate mathematical model of the controlled object, only uses its input and output data to complete the control task. The smaller the vibration of the control input signal, the less wear on the actuator valve. In the actual production process, there are generally various time delays. In the control process, choosing ICF-AS-MFAC with better time delay processing effect and faster control speed is clearly a better choice than the original MFAC and PID.
Conclusion
cIn this article, an ICF-AS-MFAC method is proposed for a class of time-delay discrete-time nonlinear systems based on a new dynamic linearization technique. This method uses only the plant's online I/O data to directly design the controller. The ICF-AS-MFAC controller has a better control effect for nonlinear time-delay systems and can effectively deal with the actuator saturation problem in the control process. The bounded-input/bounded-output (BIBO) stability and monotonic convergence of the ICF-AS-MFAC method are supported by rigorous mathematical analyses. The results of the MATLAB simulations and double-tank experiments show the effectiveness of the ICF-AS-MFAC scheme.
Footnotes
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This work was supported in part by the Beijing Municipal Natural Science Foundation under Grant 4212035, 4222045, the 1138 Project for Urban Food Safety and Risk Monitoring and Early Warning System, the National Natural Science Foundation of China under Grant 62173002, and the North China University of Technology YuYou TalentTraining Program.
Author biographies
Lipu Wu received MS degrees from North China University of Technology. He is currently working toward the PhD degree with the School of Electrical and Control Engineering, North China University of Technology. His research interests include control and cooperative adaptive cruise control system.
Zhen Li obtained a bachelor's degree in engineering from Changchun University of Technology in 2019 and is currently pursuing a master's degree in engineering from Northern University of Technology. His research interest is data-driven control and model free adaptive control.
Shida Liu received the bachelor's degree from Inner Mongolia University, Hohhot, China, in 2011, and the PhD degree from Beijing Jiaotong University in 2017. He completed the post-doctoral degree in Beihang University in 2019. Until now, he is an associate professor working in the North China University of Technology. His research interests are the data-driven control, model free adaptive control, learning control, and intelligent transportation systems.
Zhijun Li received the bachelor's degree from Northeastern University, and the Ph.D. degree from University of Science and Technology Beiling. He is a professor working in North China University of Technology. His research interests include Control and decision-making, system control.
Dehui Sun received the bachelor's degree from North China Electric Power University (Bao Ding), and the PhD degree from North China Electric Power University. He is an professor working in North China University of Technology. His research interests include control, autonomous vehicles, and big data analytics.