
Abstract
This article presents an innovative enhanced model-free adaptive iterative learning control approach suited for autonomous bus trajectory tracking systems that may experience measurement disruptions and random data dropouts. Data loss can occur independently and randomly at different times and in different iterations with varying probabilities, leading to successive data dropouts on both the time and iteration axes. The proposed enhanced model-free adaptive iterative learning control controller incorporates a data compensation mechanism to compensate for missing data, ensuring excellent control performance. This data-driven control strategy requires only input/output data for controller design. The convergence and effectiveness of the proposed approach are verified through rigorous mathematical analysis and simulation outcomes.
Keywords
Introduction
The safety of passengers and public road traffic is significantly impacted by the control effect achieved for buses, which are the primary mode of public transport1,2 and thus of paramount importance to the security of travelers’ lives and property. Therefore, research on trajectory tracking for autonomous buses has been a focus of scholars worldwide.
The controller design process can be greatly enhanced through the utilization of repetitive information, as bus operations exhibit certain repeatability, with fixed starting and terminal stations and daily driving routes.
In the realm of intelligent transportation, the iterative learning control (ILC) method has witnessed increasing application in recent years. ILC employs a typical finite-time repeated operation system to achieve optimal control of uncertain nonlinear systems. The literature presents various innovative approaches that provide effective solutions for speed trajectory tracking as well as the tracking of displacement–speed trajectories subject to unknown speed delays, control input saturation, and other uncertainties.
One such approach for the tracking control of high-speed trains (HSTs) is presented by Yu and Hou, 3 in which an advanced ILC (AFILC) algorithm is recommended. According to Ji et al., 4 an adaptive ILC (AILC) approach for HSTs is introduced, which considers unknown speed delays and control input saturation to facilitate speed trajectory tracking. Similarly, an AILC method is recommended for tracking the speed and position of a subway train by Liu and Hou. 5 Moreover, a constrained spatial AILC (CSAILC) controller is suggested by Li et al. 6 to address displacement–speed trajectory tracking for automatic train control (ATC) systems. In contrast, a high-order pseudo-partial derivative-based model-free adaptive iterative learning controller (HOPPD-MFAILC) is proposed by Ai et al. 7 to facilitate a fast convergence speed.
Another area in which the ILC method has seen broad application is in batch processing, for which a data-driven model-free AILC (MFAILC) method is proposed by Ren et al. 8 to achieve precise control. A freeway traffic ramp-metering system under a non-strict repeatable pattern is addressed by Hou et al., 9 in which the ILC method is utilized to facilitate optimal control. Similarly, precise aircraft trajectory tracking can be achieved through ILC, as presented by Buelta et al. 10
A novel approach for subway train speed tracking is presented by Zheng and Hou, 11 where model-free adaptive iterative learning energy-efficient control based on an extended state observer (ESO-based MFAILEEC) is introduced. Additionally, Yu et al. 12 proposed a distributed data-driven event-triggered MFAILC (ETMFAILC) method for multiple HSTs under iteration-varying topologies.
In summary, the ILC method is an effective tool in intelligent transportation systems that utilize historical data of the objects to be controlled. The ILC approach is widely applicable in tracking problems for a variety of system types, including HSTs, ATC systems, and aircraft tracking. The literature presents various innovative approaches to ILC that address system challenges and facilitate optimal control.
When an automated bus driving system is to receive the next input and output signals sent by a sensor, it may fail to receive them due to system failure or various transient factors, resulting in data loss. The normal operation of the bus will be detrimentally impacted by such data packet loss and measurement disturbances. The influence of measurement disturbances on the actual operation process will be examined in greater detail in the following section.
Numerous studies have been conducted on the resilience of ILC in the presence of data dropout and robustness issues. Upon review, it becomes apparent that most ILC techniques designed to address data dropout are exclusively applicable to linear systems13–17 or affine nonlinear systems.18–23 According to Bu et al.13,14 and Shen et al.15–17 separate ILC models are developed for linear systems. For affine nonlinear systems, Shen et al., 18 Liu and Ruan, 19 Bu et al., 20 and Liu and Ruan21–23 proposed control systems combining P-type ILC with other algorithms tailored to affine nonlinear systems. This situation suggests the need for further research on ILC models capable of addressing data dropout in a broader range of systems.
Current academic research on overcoming the influence of measurement disturbances focuses on several techniques. For example, He et al. 24 explored the use of a flexible micro aerial vehicle (MAV) in the presence of spatiotemporally varying disturbances. Sun et al. 25 proposed a modified ILC strategy for a four degree-of-freedom (DOF) hybrid magnetic bearing system to reject disturbances. An innovative control method that combines active disturbance rejection control (ADRC) with current-cycle ILC (CILC) is suggested by Huang et al. 26 These studies showcase various approaches to addressing measurement disturbances in different contexts.
An accurate mathematical model of the control object is crucial for the above work. If the model of the object (e.g. a bus) is unknown, the above methods may not produce desirable results. For such situations, a data-driven control method provides an alternative solution.
Model-free adaptive control (MFAC) is an emerging data-driven control method that is undergoing rapid development. MFAC employs a virtual equivalent dynamic linearized data model with a pseudo-gradient (PG) at each operation point for a certain type of nonlinear discrete-time system. This approach replaces the general nonlinear discrete-time system. MFAC has proven to be an effective control method, showing promise as advancements in the field continue. The PG of the data model is estimated solely based on the online input and output from the regulated plant, and an MFAC strategy based on the established linearized data model is then formulated. The utilization of MFAC in the realm of intelligent transportation has yielded remarkable outcomes in research on the control of urban road traffic networks, 27 GRU networks for industrial operations, 28 autonomous 4 WMV parking systems, 29 AUV heading control, 30 and static synchronous compensators (STATCOMs) to achieve sub-synchronous oscillation mitigation. 31 The MFAILC approach presented in this article achieves superior control performance due to its incorporation of the repetitive learning capabilities of ILC and the adaptive learning ability of MFAC. Unlike previous methods, the MFAILC strategy considers only the input and output data of the control object. This allows more precise adjustments and improved accuracy, making it a promising control strategy for various applications.
This article presents an enhanced MFAILC (E-MFAILC) algorithm for a self-driving bus trajectory tracking system faced with measurement disturbances and random data dropout. The E-MFAILC algorithm proposed in this study employs a compensation mechanism to overcome data loss, and it demonstrates excellent control performance. This data-driven control strategy relies only on I/O data for its design. The effectiveness and convergence of the E-MFAILC algorithm are validated through rigorous mathematical analysis and simulation results. The key contribution of this study lies in the development of a reliable trajectory-tracking system that is adaptive and iterative, making it especially suitable for real-world applications, in which precise measurements are not always guaranteed.
The article is structured as follows: The “Problem formulation” section outlines the problem formulation, “The scheme of E-MFAILC” section presents the E-MFAILC algorithm along with details on its convergence analysis, the “Simulation” section shows cases numerical examples to demonstrate the algorithm's efficacy, and finally, the “Conclusions” section concludes with a summary of the article.
Problem formulation
Currently, research on autonomous buses can be categorized into two areas: lateral angle control and longitudinal speed control. The control process can be better understood by referring to Figure 1.

Longitudinal and lateral integrated control frame diagram.
Longitudinal dynamic analysis
The longitudinal speed of a bus while in motion is primarily determined by the longitudinal control forces exerted upon it. Factors that affect the vehicle during operation include various automobile principles such as air resistance, rolling resistance, and ramp resistance. These factors are depicted in Figure 2, which presents a longitudinal force analysis diagram. These factors are essential considerations for those studying or working in the field of automobile engineering.

Longitudinal force diagram of the vehicle.
Newton's second law in classical mechanics states that the mechanical equation of longitudinal force can be articulated as follows:


The equation used to determine rolling resistance is



A bus route exhibits periodicity in a finite time domain; accordingly, introducing the iterative axis i yields

In summary, the longitudinal speed tracking and control of the bus will require the utilization of both the control input
Lateral dynamic analysis
The driving wheels are typically the front wheels, while the rear wheels serve as the power steering wheels. More specifically, a bus typically has two rear wheels and two front wheels. Figure 3 displays a lateral analysis of an equivalent model.

A schematic representation in which the front wheels are depicted with the same angle of rotation.
As illustrated in Figure 3,






Because a bus route exhibits periodicity in the finite time domain, introducing the iterative axis i yields:

The following nonlinear discrete input/output system can be used to represent equation (13)

The complexity of the autonomous vehicle control problem is exacerbated by the need for an exact mathematical representation of the vehicle in order to utilize methods of integrated lateral and longitudinal control due to the interconnection between the longitudinal and lateral control systems. 32 However, relevant investigations indicate that independent lateral and longitudinal control can also achieve a good control effect. The analysis of the control system and the utilization of full-form dynamic linearization procedures, as detailed below, are applicable to both the lateral and longitudinal control of autonomous vehicles.
To uniformly represent the entire control system, the following nonlinear discrete system is formulated:

The scheme of E-MFAILC
Before introducing dynamic linearization technology, we first state that system (15) is considered to satisfy the following assumptions.
The function
On the iteration axis, equation (15) is generalized Lipschitz, meaning that it satisfies:



For a given angle
Generally, the assumptions above are achievable in practical applications. Among them, Assumption 1 indicates that the dynamic characteristics of the controlled system are constantly changing, which is a commonly used control assumption with strong practicability. From an energy standpoint, Assumption 2 implies that in the given circumstances, the system's rate of change in energy cannot be boundless. Assumption 3 means that the control object is controllable, which is necessary for the whole control system.
Figure 1 shows that the desired body angle
The contents of this section are arranged as follows. In the “Full-form dynamic linearization method for the iterative domain” section, the full-format dynamic linearization analysis was performed under the iterative domain. The AFF-FFDL-MFAILC algorithm is proposed in the “AFF-FFDL-MFAILC controller design” section and the “Design of the Enhanced AFF-ILC-MFAC (EMFAILC) controller with lost data compensation” section describes the AFF-FFDL-MFAILC algorithm with data loss and then proposed the E-MFAILC algorithm with compensation mechanism.
Full-form dynamic linearization method for the iterative domain
In the iterative domain, the dynamic linearization process for the nonlinear bus dynamics system can be summarized as follows:
For the nonlinear system in (15), when



Please see Hou and Xiong. 33
According to the actual operation requirements of buses,


AFF-FFDL-MFAILC controller design
The controller searches for a suitable control input to determine the vehicle control signal based on the disparity between the desired body angle
The control input criterion function is


A high-order adaptive feedforward iterative learning law is implemented to bolster the system's steadiness

Finally, the entire input control law



The parameter vector

Equation (27) is defined as is the reset mechanism of the PG parameter
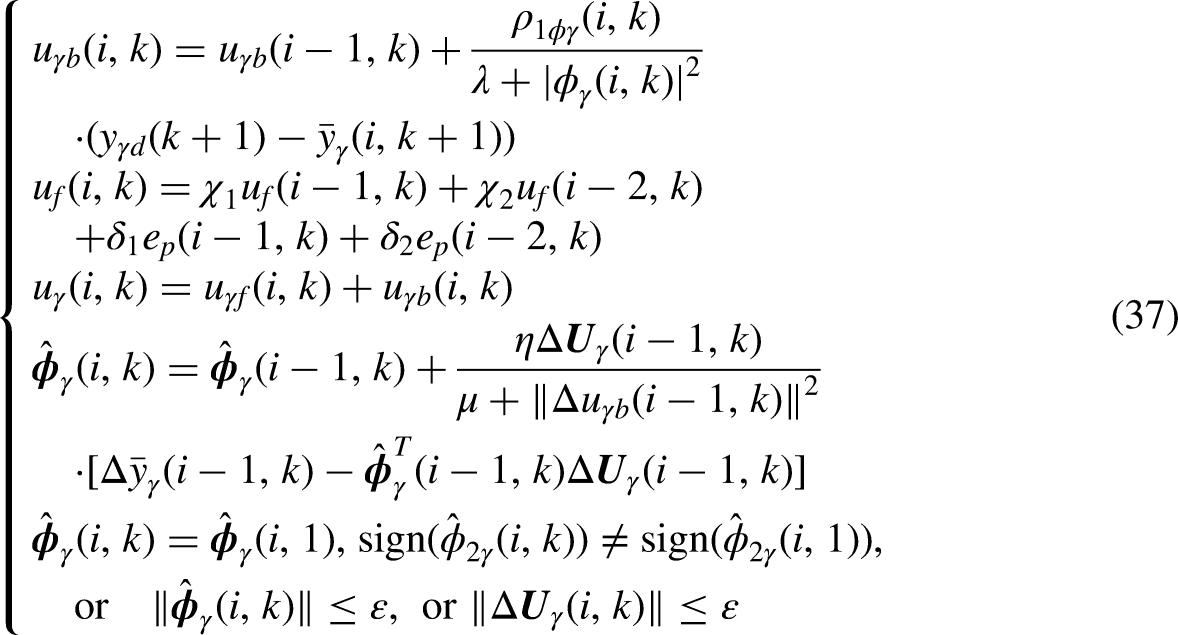
Upon combining the control algorithm in (22), the high-order adaptive feedforward iterative learning law in (23), the entire input control law in (24), the previously obtained PG estimation algorithm in (26), and the resetting algorithm in (27), the corresponding AFF-FFDL-MFAILC algorithm is expressed as follows:

Design of the enhanced AFF-ILC-MFAC (E-MFAILC) controller with lost data compensation
The current main concern in the field of ILC is ensuring the robustness of the regulated system (15) in cases of data failure on both the controller and actuator sides. This issue must be addressed to ensure the system's repeatability and reliability.
Describe the data dropout
The control aim is to identify the most suitable control input
According to equation (28), the output



A block diagram of the proposed control system.
Therefore, the AFF-FFDL-MFAILC algorithm with data dropout can be described as follows:



Design of the data compensation mechanism
According to the above analysis, the full-format linearized version of equation (1) for the SISO nonlinear discrete-time system is as follows:



It is evident from Figure 4 that the controller can be iteratively taught based on the actual control input
The proposed E-MFAILC algorithm in this article is applied to a class of SISO systems. For general multiple-input and multiple-output (MIMO) systems, the E-MFAILC algorithm can also be applied by using the dynamical linearization technique for MIMO systems.
Convergence analysis
Before the convergence analysis, the following two lemmas are given
Let

if
Let
The plant described by (15), which satisfies Assumptions 1 to 4, is controlled by the E-MFAILC scheme expressed in (37) for the regulator When
See the appendix.
Simulation
Construction of the simulation environment
The selected experimental bus's equipment specifications and the necessary speed it must maintain on the road lead to a scenario that solely focuses on the operation between two stations. To accurately simulate this scenario, a simulation duration of 300 s is set, equivalent to the 5-minute bus journey from one station to the next. The dynamic model used is based on data collected from the Beijing Foton BJ6105EVCA-49 bus, as detailed in Table 1, combined with the bus kinematic process analysis in the “Problem formulation” section. This represents an objective and precise approach to modeling the behavior of autonomous buses.
Data related to the BJ6105EVCA-49 bus.

A dynamic model with the following input‒output relationship is used for simulation:

Notably, the model in equation (39) is employed only to create the independent input‒output data mapping of the bus; it is not involved in the controller design from the perspective of the model structure or parameter data.
For the comparative experiments in this article, two iterative learning algorithms are employed.
The conventional MFAILC algorithm by Ren et al.
34
is shown as follows:

Parameter settings of the two control methods are considered for comparison.

MFAILC: model-free adaptive iterative learning control; PD-ILC: partial derivative-iterative learning control.
Simulation analysis of longitudinal control
Consider the SISO nonlinear longitudinal control system of an autonomous bus as given in (15), which is contaminated by system noise 


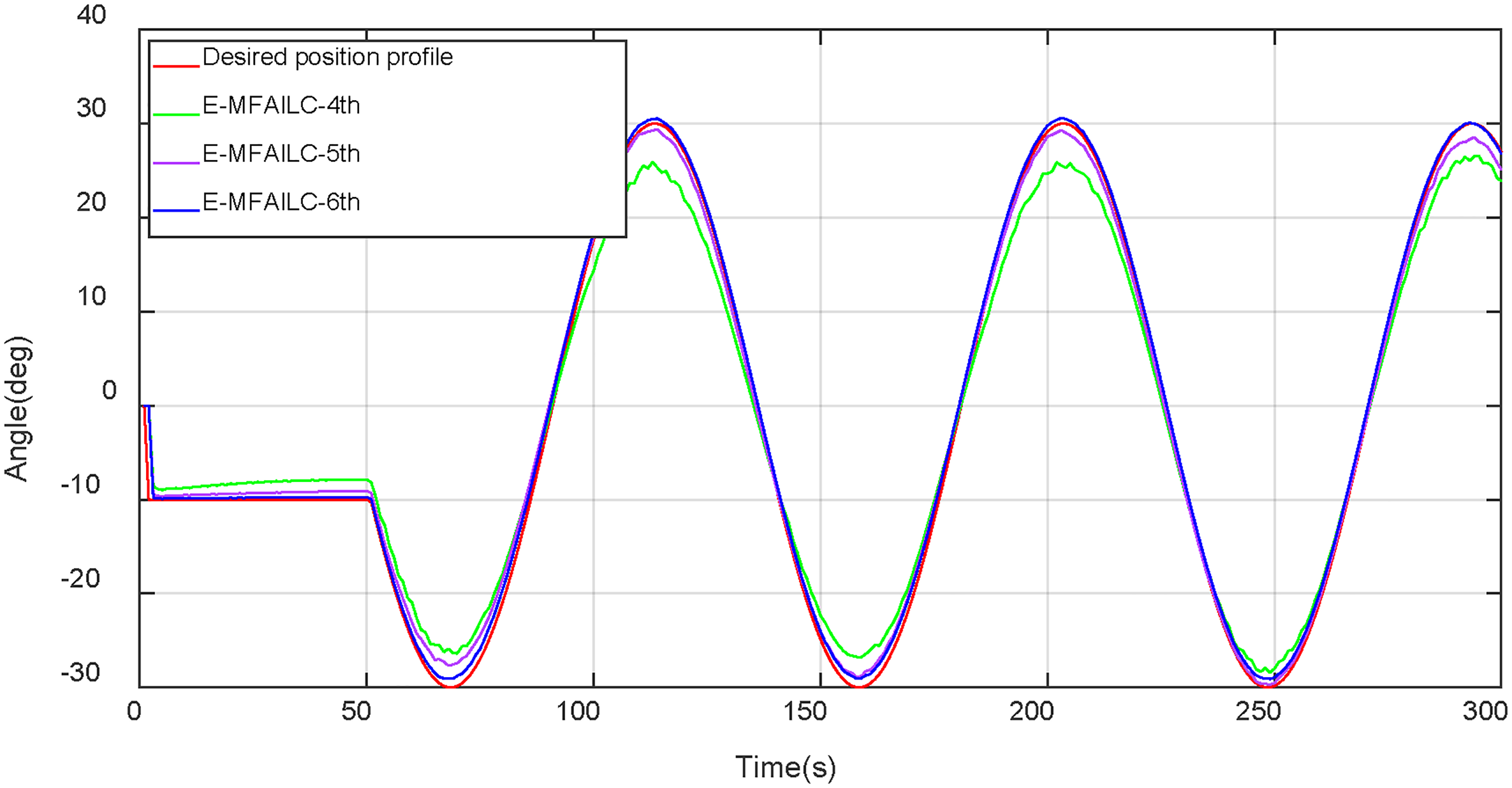
Tracking the performance of enhanced model-free adaptive iterative learning control (E-MFAILC) with 10% data dropout.
The curves of the tracking effects produced by the E-MFAILC, MFAILC, and PD-ILC algorithms are shown in Figures 5 to 7. The tracking effect of the E-MFAILC algorithm is superior to those of the other two ILC algorithms, as evidenced by the up-and-down oscillation of its tracking curve in the 4th iteration. In contrast, the MFAILC algorithm is unable to accurately track the desired velocity beyond 100–180 s. Similarly, the PD-ILC algorithm cannot fully track the required velocity throughout the whole process. These findings indicate that the adaptation enabled by the data compensation mechanism ability makes the proposed approach perform significantly better than the algorithms considered for comparison.

Tracking the performance of model-free adaptive iterative learning control (MFAILC) with 10% data dropout.

Tracking the performance of partial derivative-iterative learning control (PD-ILC) with 10% data dropout.
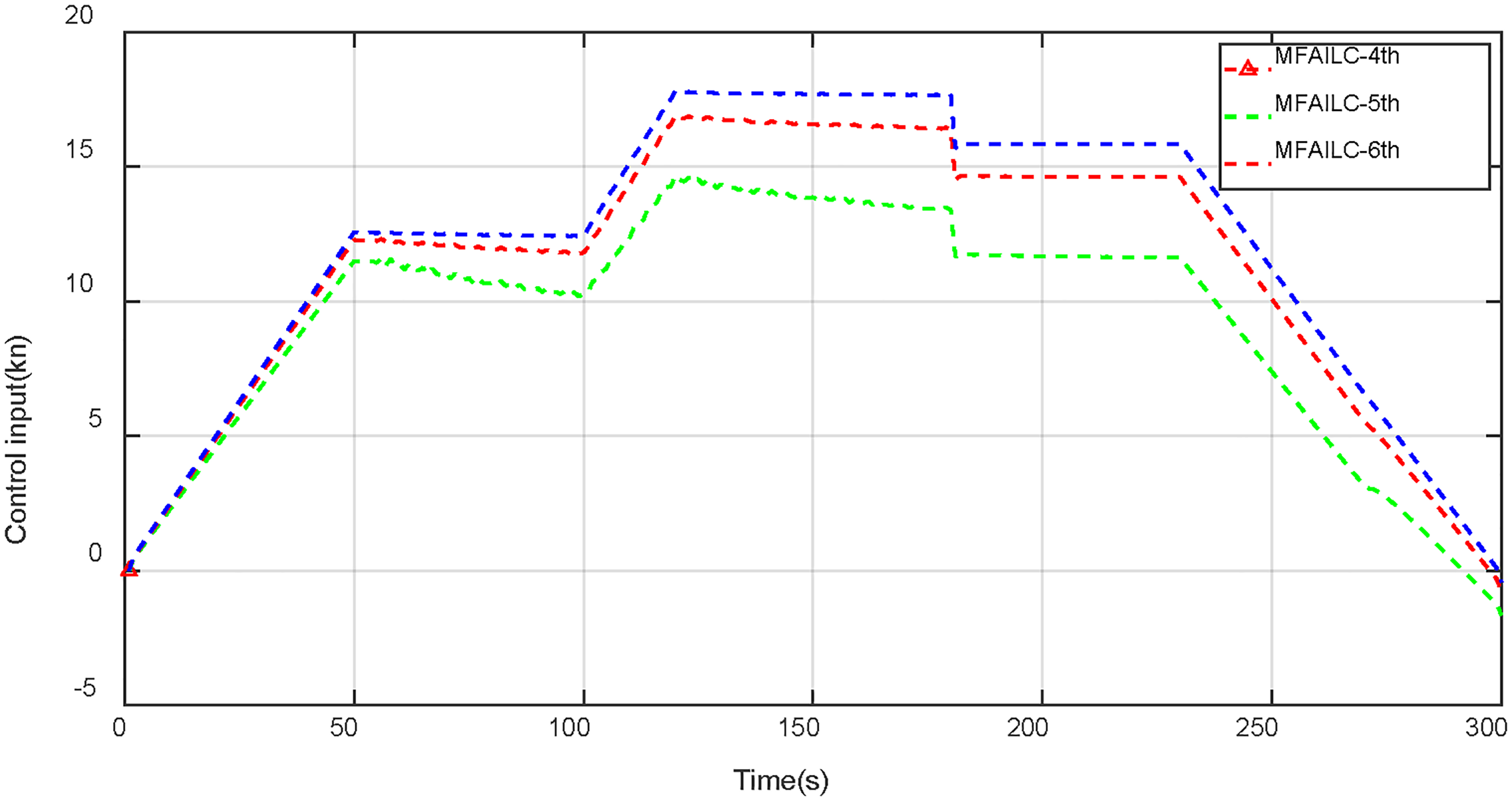
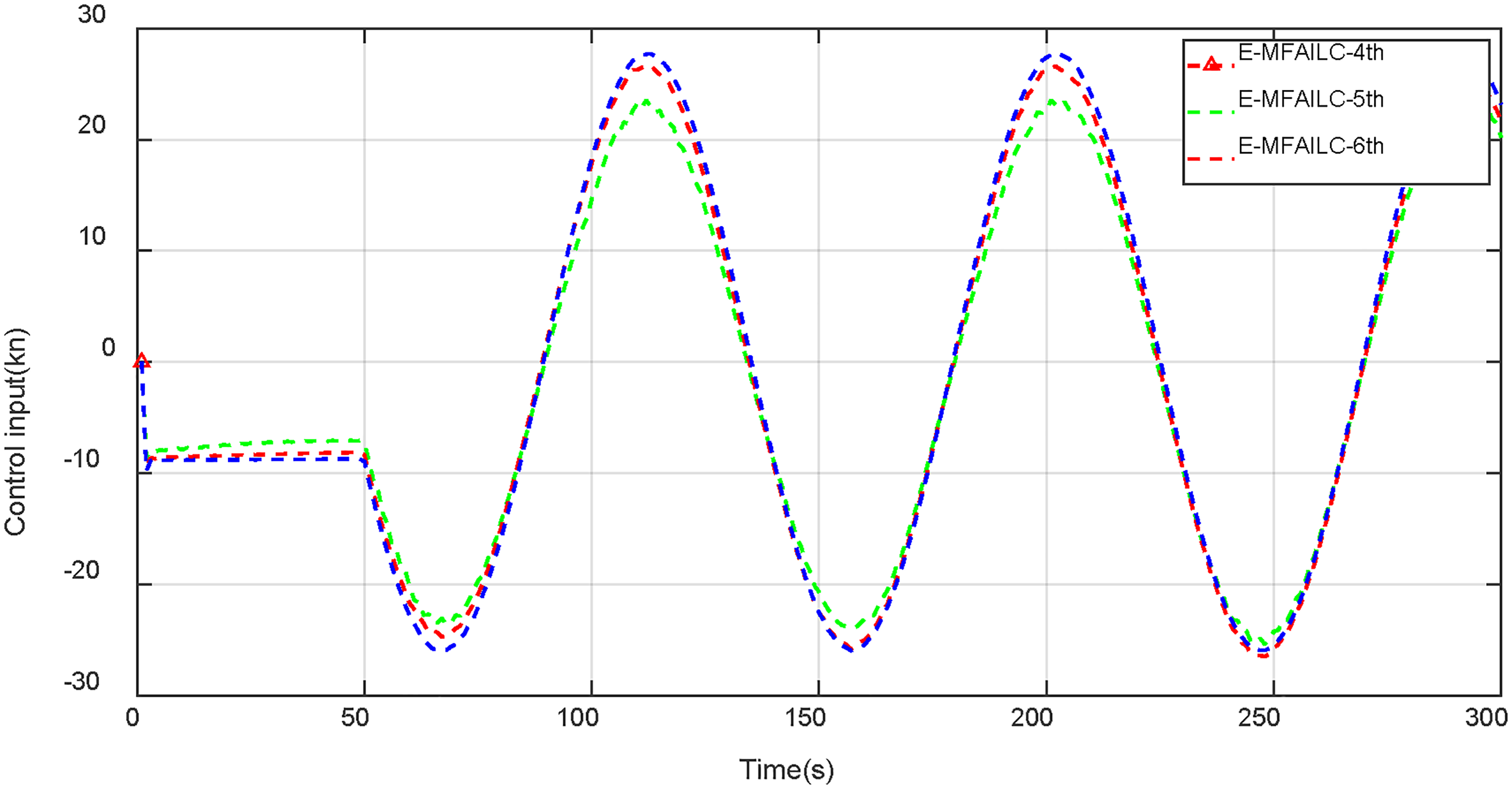
As can be seen in Figures 8 to 11, both E-MFAILC and MFAILC algorithms can track the expected trajectory after four to six iterations, while the PD-ILC algorithm cannot meet the tracking requirements in terms of control inputs.

The control input of enhanced model-free adaptive iterative learning control (E-MFAILC) with 10% data dropout.
The control input of enhanced model-free adaptive iterative learning control (E-MFAILC) with 10% data dropout.

The control input of partial derivative-iterative learning control (PD-ILC) with 10% data dropout.

Errors of E-MFAILC, MFAILC, and PD-ILC with 10% data dropout.
Considering the error convergence rate and initial error value, the adaptability and anti-disturbance capability of the E-MFAILC algorithm are thus verified. The mean absolute error (MAE) index for error evaluation is expressed as shown in the following formula:
Table 3 lists the calculated errors of the three algorithms (E-MFAILC, MFAILC, and PD-ILC) after various numbers of iterations. These error statistics demonstrate that E-MFAILC's error values are lower than those of the other two methods, indicating both a faster error convergence speed (the MAE of E-MFAILC in the sixth iteration is 3.268, that of PD-ILC is 18.967, and that of MFAILC is 7.489) and a lower final stable error value (the MAEs in the 100th iteration for E-MFAILC, PD-ILC, and MFAILC are 0.0001315, 3.085, and 0.00013, respectively). From these two evaluations, it is not difficult to find that the E-MFAILC algorithm has better data compensation and adaptation capabilities than the other two algorithms.
The MAEs of the three algorithms in various iterations.
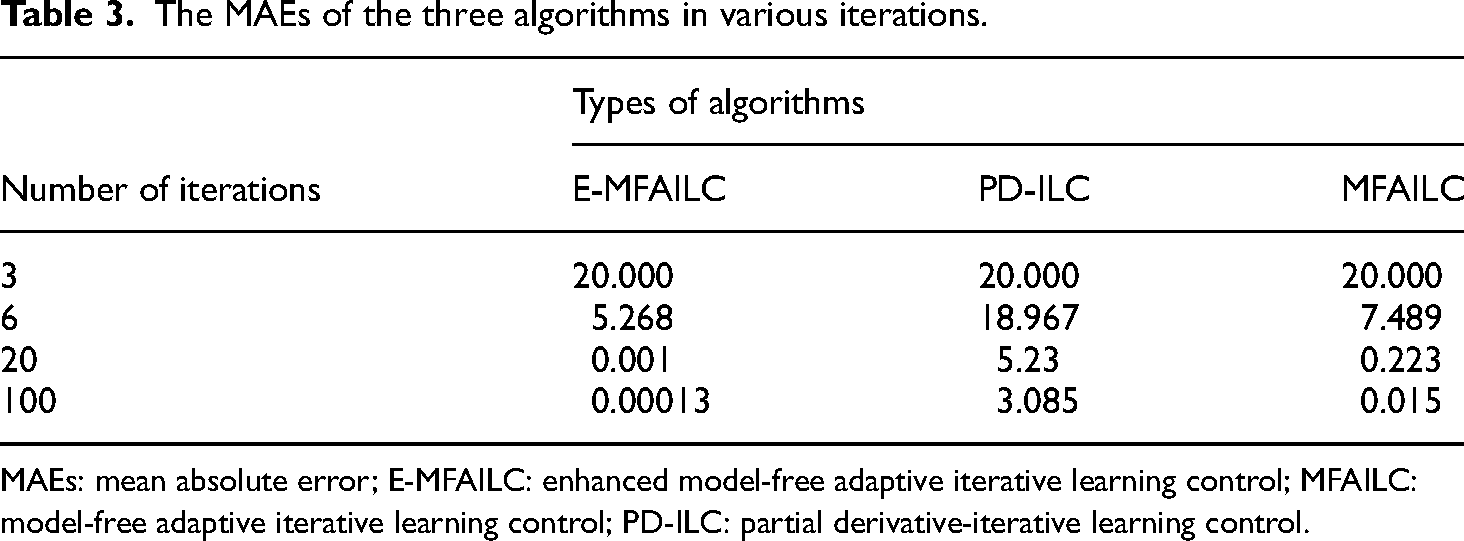
MAEs: mean absolute error; E-MFAILC: enhanced model-free adaptive iterative learning control; MFAILC: model-free adaptive iterative learning control; PD-ILC: partial derivative-iterative learning control.
From the error analysis in Figures 5 to 8 and Table 2, it can be seen that the tracking effects of the three algorithms are different. The E-MFAILC algorithm is validated in terms of its adaptability and data compensation ability in comparison to the MFAILC algorithm and PD-ILC.
Simulation analysis of lateral control
Consider the following SISO nonlinear lateral control system for an autonomous bus:

The system noise 
Tracking the performance of enhanced model-free adaptive iterative learning control (E-MFAILC) with 10% data dropout.

Tracking the performance of MFAILC with 10% data dropout.

Tracking the performance of partial derivative-iterative learning control (PD-ILC) with 10% data dropout.
As can be seen in Figures 15 to 17, both E-MFAILC and MFAILC algorithms can track the expected trajectory after four to six iterations, while the PD-ILC algorithm cannot meet the tracking requirements in terms of control inputs.
The control input of enhanced model-free adaptive iterative learning control (E-MFAILC) with 10% data dropout.
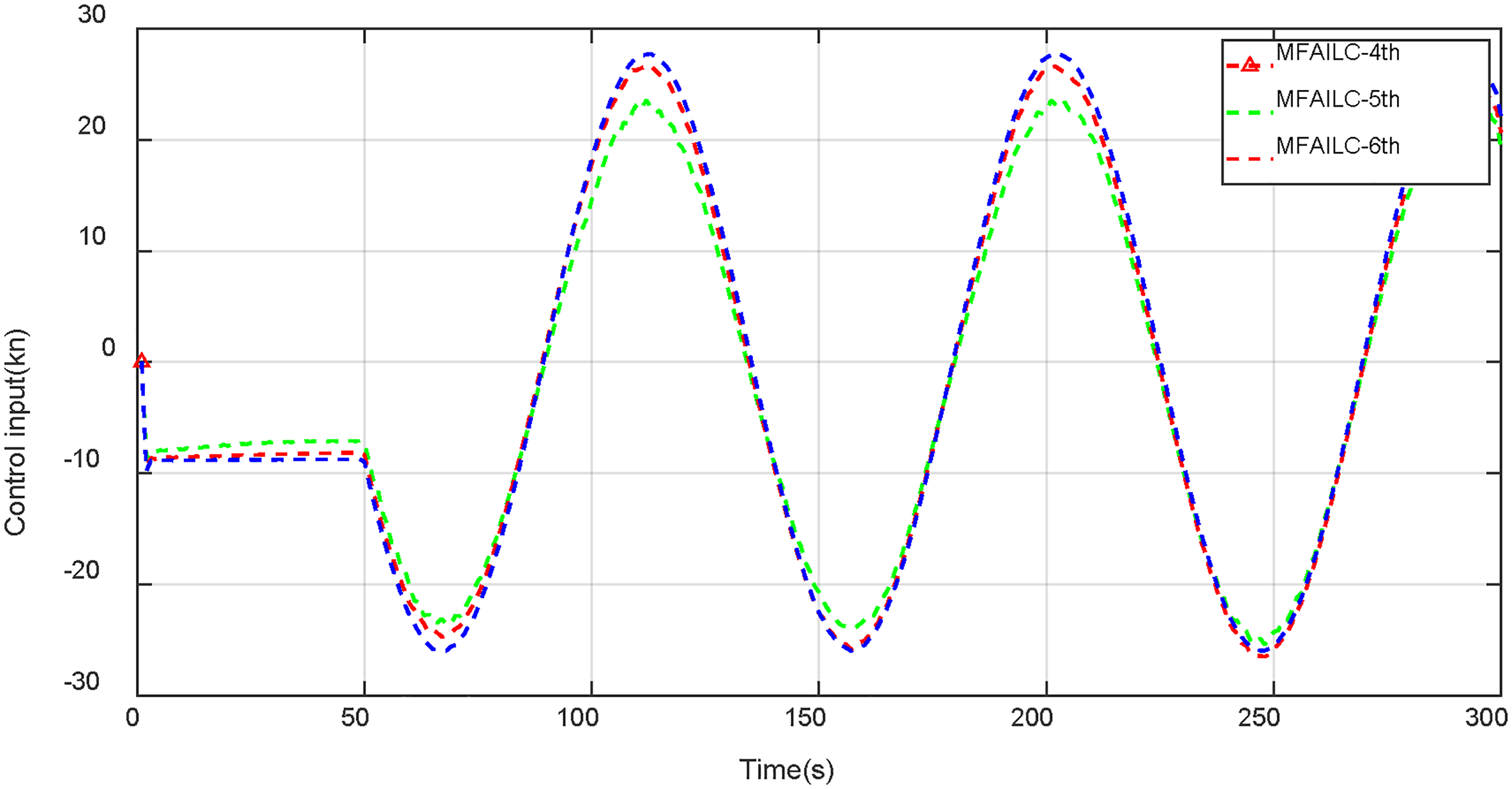
The control input of model-free adaptive iterative learning control (MFAILC) with 10% data dropout.

The control input of partial derivative-iterative learning control (PD-ILC) with 10% data dropout.
Figure 18 shows the tracking error curves obtained using the three algorithms with the MAE as the error evaluation index. The E-MFAILC algorithm is clearly superior to the other two algorithms in terms of its initial error value and error convergence, particularly after 100 iterations. PD-ILC has difficulty maintaining a consistent final error value, and the error convergence rate of MFAILC is evidently inferior to that of E-MFAILC. The MFAILC algorithm's error convergence rate is faster than that of PD-ILC, but its initial error value is too high. Through comprehensive consideration of the error convergence rate and initial error value, the adaptability and anti-disturbance capability of the E-MFAILC algorithm are further verified.

MAEs of E-MFAILC, MFAILC, and PD-ILC.
Table 4 lists the errors of the three algorithms (E-MFAILC, MFAILC, and PD-ILC) after various numbers of iterations. The error statistics demonstrate that E-MFAILC's error values are lower than those of the other two methods, with E-MFAILC's MAE in the sixth iteration being 7.358, that of PD-ILC being 30.367, and that of MFAILC being 7.489 and the final stable error values in the 100th iteration being 0.00024 for E-MFAILC, 43.085 for PD-ILC, and 0.015 for MFAILC. From these two evaluations, it is not difficult to find that the E-MFAILC algorithm has better data compensation and adaptation capabilities than the other two algorithms.
The MAEs of the three algorithms in various iterations.

MAEs: mean absolute error; E-MFAILC: enhanced model-free adaptive iterative learning control; MFAILC: model-free adaptive iterative learning control; PD-ILC: partial derivative-iterative learning control.
With the increase in the data packet loss rate, the control performance will gradually weaken. After a large number of tests, when the data packet loss rate is greater than or equal to 20%, the control performance of the proposed controller in this article will significantly deteriorate. In practical applications, with the current sensing accuracy, the data packet loss rate is less than 5% in most cases. It has been measured by many numerical simulation experiments, when the data packet loss rate is 10%, the desired tracking effect can still be achieved, which can be satisfied in practical application.
Conclusions
This academic work presents the development of the novel E-MFAILC algorithm for a class of SISO systems that experience data dropout and measurement disturbances. To address the challenges presented by an unknown nonlinear system, an iterative learning method based on full-form dynamic linearization is proposed, which utilizes only the system input and output information. An E-MFAILC controller is then formulated. The use of data compensation allows the controller to maintain excellent performance in the event of packet loss. This approach is a data-driven control strategy that relies solely on I/O data for controller design. The effectiveness and convergence of the proposed approach are validated through rigorous mathematical analysis and simulation results.
Footnotes
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This work is supported by Beijing Municipal Natural Science Foundation under Grants 4212035, 4222045, National Natural Science Foundation (NNSF) of China under Grants 62073025, North China University of Technology Scientific Research Foundation, North China University of Technology YuYou Talent Training Program. R&D Program of Beijing Municipal Education Commission (KM202310009010, KM202210009011)). North China University of Technology Unveils Project Support (2023YZZKY03).
Author biographies
Shida Liu received his PhD degree at the Advanced Control Systems Laboratory from Beijing Jiaotong University in 2017. He is currently an associate professor at School of Automation, North China University of Technology University. His research interests include learning control, data-driven control, complex industrial process, and autonomous car.
Wei Huang received his bachelor's degree from Henan Institute of Technology, Xinxiang, China, in 2017 and is currently pursuing a master's degree from North China University of Technology Beijing, China. His current research interests include iterative learning control, adaptive control, and data loss.
Ye Ren received the bachelor's degree and PhD degree from Beijing Jiaotong University, Beijing, China, in 2013 and 2020, respectively. In 2018, he has visited École Polytechnique Fédérale de Lausanne, Lausanne, Switzerland. He is currently a lecturer with North China University of Technology, Beijing, China. He is a member of the Beijing Key Laboratory on Intelligent Control Technology for Urban Road Traffic, and the youth member of the 3rd Transport Planning Technical Committee of World Transport Convention. He has authored over 20 papers in peer-reviewed journals and prestigious conference proceedings. His current research interests include data-driven control, multidimensional traffic systems control, and multi-agent systems control.
Li Wang, PhD supervisor, vice president of North China University of Technology, director of Beijing Key Laboratory of Intelligent Control Technology for Urban Road Traffic, Beijing Great Wall Scholar, Beijing Science and Technology Rising Star. He has presided over more than 30 projects, such as the National Natural Science Foundation of China, the National Key R&D Program, the Beijing Science and Technology Program, the Beijing Science and Technology Rising Star Program, the 2011 Scientific Research and Development Plan of the Beijing Municipal Education Commission, and the horizontal commissioned projects of enterprises, won nine provincial and ministerial science and technology awards, published 41 papers as the first author or corresponding author (23 papers retrieved by SCI/EI), and authorized 15 invention patents. He has six software copyrights and four published works. In 2017, he was rated as “Outstanding Communist Party Member of Beijing Universities”, and in 2020, he was rated as “Beijing Advanced Worker”. In 2015, the scientific research team led by him was awarded the “Annual Scientific Research and Innovation Team of the Chinese Society of Automation”. In terms of teaching and educating people, he has always adhered to front-line classroom teaching. In 2020, as the person in charge, he was approved as the “‘Control and Intelligence’ Beijing Excellent Undergraduate Education Team”, and in 2021, he was shortlisted for the first prize of Beijing Teaching Achievement Award, and his lecture on “Urban Road Traffic Control Theory and Technology” was rated as a demonstration course of ideology and politics in the postgraduate education course of Beijing universities.
Honghai Ji received his PhD degree at the Advanced Control Systems Laboratory from Beijing Jiaotong University in 2017. He is currently an associate professor at School of Automation, North China University of Technology University. His research interests include learning control, data-driven control, complex industrial process, and autonomous car.
Appendix
The following inequality can be easily obtained by taking the norms of both sides:
By solving equation (1.13), we can obtain:
From inequality (21), it can be deduced that when
Since
The characteristic equation of the matrix