
Abstract
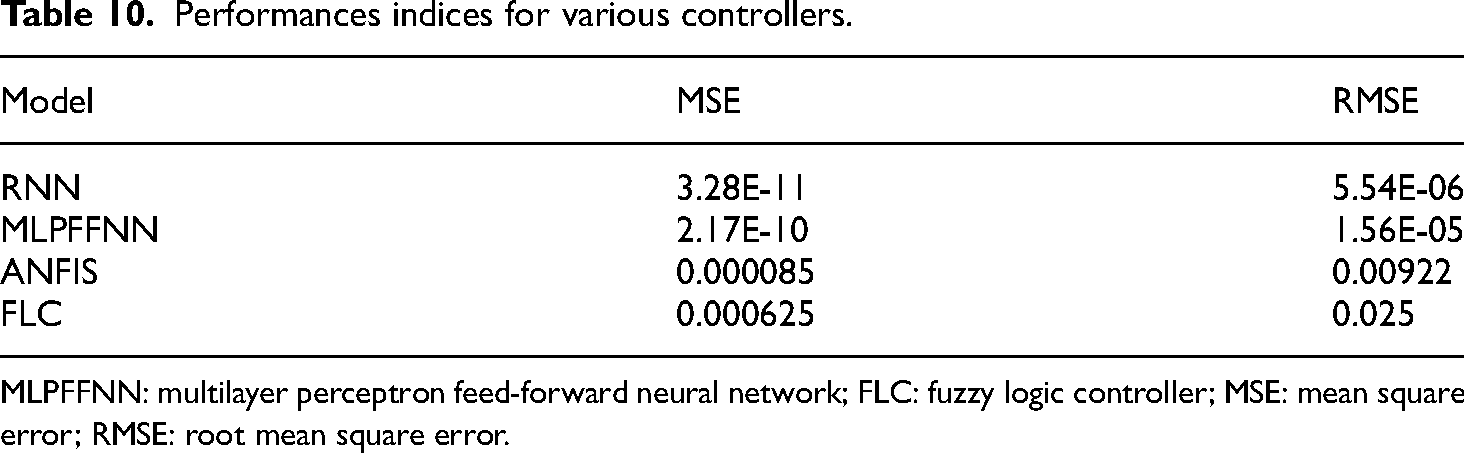
Wind is one of the most widely used renewable energy sources due to its cost-effectiveness, power requirements, operation, and performance. There are many challenges in wind turbines, such as wind fluctuation, pitch control, and generator speed control. When the wind speed exceeds its rated value, the pitch angle controller limits the generator output power to its rated value. In this research work, several soft computing techniques have been implemented for pitch control of variable-speed wind turbine. The data is collected for the National Renewable Energy Laboratory offshore 5 MW baseline wind turbine. Wind speed, tip speed ratio, and power coefficient are taken as inputs, and pitch angle as output. Machine learning and artificial intelligence-based techniques such as recurrent neural networks (RNNs), adaptive neuro-fuzzy inference system (ANFIS), multilayer perceptron feed-forward neural network (MLPFFNN), and fuzzy logic controller (FLC) are implemented on MATLAB, and their results are evaluated in terms of mean square error (MSE) and root mean square error (RMSE). The controllers have been implemented in MATLAB/Simulink to schedule the wind turbine blade pitch angle and keep the output power stable at the rated value. The experimental results show that RNN provided the best results for 15 neurons in hidden layers and 1000 epochs with MSE of 3.28e-11 and RMSE of 5.54e-06, followed by MLPFFNN with MSE of 2.17e-10 and RMSE of 1.56e-05, ANFIS with MSE of 8.5e-05 and RMSE of 9.22e-03, and FLC with MSE of 6.25e-04 and RMSE of 0.025. The proposed scheme is more reliable and robust and can be easily implemented on a physical setup by using interfacing cards such as dSPACE, NI cards, and data acquisition cards.
Keywords
Introduction
Wind energy has become popular in the last decade due to its low cost and environment-friendly nature. The world's energy demand is rising day by day and it will keep growing in the future. The wind energy is one of the most promising renewable energy sources available all around the globe. There are two types of wind turbines, fixed-speed wind turbines and variable-speed wind turbines (VSWTs). When the rotor of fixed-speed wind turbine attains the rated speed then it is directly connected to the grid system. The grid's frequency defines the speed of the rotor. Therefore, no power converter is required to synchronize the grid and generator frequency. However, such types of wind turbines usually generate no power as they seldom get enough wind speed to attain the rated rotor speed. The VSWT is preferred due to its better efficiency, lower aerodynamic load, and high power-capturing capabilities. 1 There are three threshold wind speeds for any VSWT, the cut-in speed, rated speed, and the cut-out wind speed. Hence, the operation of VSWT can be divided into four regions, region-1, region-2, Region-3, and region-4. In region-1, when the wind speed is below the cut-in speed, the wind turbine does not produce any power as its rotor does not get enough torque to overcome the friction losses. In region-2, the wind speed exceeds the cut-in speed; the blades start whirling and the wind turbine starts producing energy. Maximum power point tracking (MPPT) is performed in this region to extract maximum power from the wind turbine. The MPPT is performed by operating the wind turbine at the maximum value of power coefficient and optimal tip speed ratio (TSR) by maintaining a constant pitch angle of zero degrees. The power coefficient (Cp), is a nonlinear function of the operational TSR and pitch angle. 2 The VSWT operates in this region most of the time. When the wind speed exceeds the rated value but it is less than the cut-out wind speed, then the wind turbine operates in region-3. In this region, pitch control is employed to operate the wind turbine at rated rotor speed and limit the wind turbine output power at its rated value. The pitch angle controller schedules the pitch angle to control the aerodynamic forces acting on the wind turbine blades. The pitch control also minimizes the structural loading along with capturing rated power at high wind speeds. 3 When the wind speed exceeds the cut-out speed, the VSWT is operating in region-4. In this region, the wind speed is strong enough to damage or collapse a wind turbine. Therefore, then brakes are applied to stop the wind turbine and prevent form any structural damage. 4 The operation of VSWT in all these four regions is expressed in Figure 1.

Operating regions of VSWT 5 . VSWT: variable-speed wind turbine.
Related works
Different strategies have been implemented in the literature for the pitch angle of VSWTs. Recently, the Takagi-Sugeno fuzzy logic control (FLC), 6 the fractional-order proportional integral controller (FO-PI), 7 and the fuzzy-proportional integral derivate (F-PID) controller 8 were used for pitch control of VSWT. The PI controller is the dominating controller paradigm for pitch control in WT. Many of the researchers used the grey wolf optimization (GWO) and state-space modeling of the vector control loops of voltage source converters (VSCs) for MPPT in VSWTs to tune PID controllers. The speed control, direct current link voltage, and generated real power loops of 5 MW PMSG wind turbine's PI controllers on the rotor side and grid side VSCs were optimized using enhanced GWO. 9 The simulation findings showed that compared to simplex search tuning procedures, the GWO produced better trajectories for the PCC's DC-link voltage, active power & reactive power. 10 A new adaptive control strategy using second-order sliding mode is applied to a floating wind turbine system above its rated region, well-suited for the nonlinear nature of floating wind turbines and easy to implement with limited modeling knowledge. The proposed controller implemented on the fatigue, aerodynamics, structures, and turbulence (FAST) simulator demonstrated high performance, incorporating multi-blade coordinate's transformation, combining collective and individual blade pitch control for power regulation, platform pitch motion reduction, and reducing blade fatigue load. 11 The top-mounted pitching point absorber shows promise for wave energy conversion due to its easy attachment to offshore structures, but accurately predicting its performance is challenging due to nonlinear hydrodynamics. Smoothed particle hydrodynamics is used to address this issue, validated against measurements and showing good agreement in wave interaction simulations with the potential for siting larger devices in finite deep water. 12 To mitigate wind turbine fatigue, individual pitch control (IPC) is commonly used to reduce tilt and yaw moments, alleviating blade-root bending. The authors evaluated model predictive control (MPC), H-infinity (H∞), and proportional integral (PI)-based IPC strategies integrated with collective pitch control, showing H∞ IPC as the most effective in reducing damage equivalent load and blade-root bending moments. In addition to being straightforward and reliable, it can also solve complicated optimization problems. 13
The FOPID controller is also implemented for VSWT pitch control. A gain and phase margin (GMP) tester was added to a wind turbine's control path to analyze GMP. Simulations were done in MATLAB/Simulink, lower overshoot, and shorter settling time had been obtained in this method. 14 However, its disadvantage is that complex computations need more computational time. 15 Another paper introduces an innovative reinforcement learning-based control method for wind turbines, combining deep neural networks (DNNs) and MPC to adapt to real-time system dynamics, enhancing performance, and reducing computational complexity. The approach utilizes a DNN to approximate wind turbine dynamics and integrates it into MPC architecture, demonstrating superior robustness and control performance compared to traditional methods, as evidenced in simulations with a high-fidelity wind turbine simulator. 16 The proposed technique was easy to realize and had stronger robustness. Simulations were done in MATLAB/Simulink. A better step response using PID particle swarm optimization (PSO) was obtained than the PID genetic algorithm (GA). The researchers have implemented a modified multiswarm PSO algorithm using an adaptive factor selection strategy for partially shaded photovoltaic (PV) systems, and it was observed that it provides better results as compared to the classical mutiswarm PSO algorithm. 17 The MPPT of solar PV system has also been performed using incremental conductance (IC) and perturb and observe methods, and the results demonstrated better results for the IC algorithm. 18 The sliding mode control was also adopted for the pitch control of the wind turbine. 19 To perform MPPT in region-2, VSWTs use vector control with a power electronic converter. A simulation analysis using a three-blade National Renewable Energy Laboratory (NREL) 5-MW wind turbine was released to support the theoretical advancements and show the closed-loop convergence of the entire control system. Tracking error, annual energy production (AEP), and fatigue load were examined using the FAST baseline controller. 20
Extreme environmental conditions (waves, currents, etc.) can cause wind turbines to malfunction, resulting in inaccurate wind data. Oscillations in wind turbines cause wind readings to be distorted. The researchers created a unique pitch neuro-control architecture based on a neuro-estimator (NE) of the effective wind to address this problem. The system was completed with the addition of a lookup table, aNE, a PID controller, and other components. 21 The controller is powered by a combination of present and future wind signals. Simulations revealed that this technique outperformed PID in terms of accuracy.
Pitch control has also been implemented using FLC. 22 Two methods have been considered (fault on network and wind speed disturbance) to demonstrate the effectiveness of the controller. It not only increases power quality but also enhances the wind energy system's transient performance when there are network failures. Simulations showed that lower ripple content was produced in FLC than PID controller. Fuzzy PID was another technique used to regulate the pitch of wind turbines. At different wind speeds, this technique was utilized to alter the wind turbine's blade pitch angle. 23 Another article explores the use of IPC for MW-class wind turbines to reduce asymmetric blade loads and proposes a method using gain scheduling to minimize the 1P component of the bending moment without exciting blade vibration modes, demonstrating effectiveness in solving the problem of exciting the first-order vibration mode in the high wind speed range. 24 A decoupled model reference adaptive control framework was explored for blade pitch control in floating offshore wind turbines, demonstrating improved performance in reducing power fluctuation and blade loads across a range of turbulent wind speeds, without the need for extensive parameter tuning. The integrated controller shows adaptability and potential for multiple control purposes, providing a promising solution for offshore renewable energy. 25
Artificial intelligence-based soft computing and fuzzy modeling techniques have the potential to deal with uncertainties and disturbances. In contrast, hard computing techniques are conventional techniques, that are based on mathematical approaches, and their program is needed to be written for each specific problem. Hard computing techniques require extremely precise data and operate on binary logic. Because of the high degree of precision and accuracy required by such methodologies, such models are valid in the best-case scenario. Soft computing techniques are learning systems with biological inspiration that can model nonlinear issues. To cope with these drawbacks, in this research, four advanced controllers, such as adaptive neuro-fuzzy inference system (ANFIS), ANN, recurrent neural network (RNN), and FLC are implemented to analyze the pitch control performance.
The contribution of the present work is summarized in the below points:
The collection of real-time experimental data for the 5 MW offshore wind turbine. Selection of the most effective and highly influential input parameters. Development of RNN, ANFIS, multilayer perceptron feed-forward neural network (MLPFFNN), and fuzzy logic-based pitch controllers. Implementation of the designed controllers for pitch control of 5 MW offshore wind turbine. Comparison of the results by recording the values of different performance matrices (mean square error (MSE) and root mean square error (RMSE)) and the selection of the most accurate algorithm for pitch control of a 5 MW offshore wind turbine.
Materials and methods
NREL 5 Mw offshore wind turbine
The mechanical power generated by the wind turbine can be calculated by the following formula
26
:

The power coefficient is influenced by the pitch angle (β) and TSR. The TSR (λ) is expressed as follows:
26

The NREL 5 MW offshore VSWT was the major focus of the presented study. The key characteristics of the investigated wind turbine are shown in Table 1. The statistical properties of the input–output dataset collected for 5 MW are shown in Table 2. 70% of the data samples were used for training the algorithms and 30% of data samples were used for testing purposes. The input parameters are wind speed, TSR, and power coefficient while the Pitch angle is taken as the output.
Specifications of NREL 5 MW wind turbine.

Statistical properties of wind turbine data.

The time series data of wind speed, TSR, and power coefficient recorded for 300 s is shown in Figures 2–4.

Time series of wind speed.

Time series of tip speed ratio.
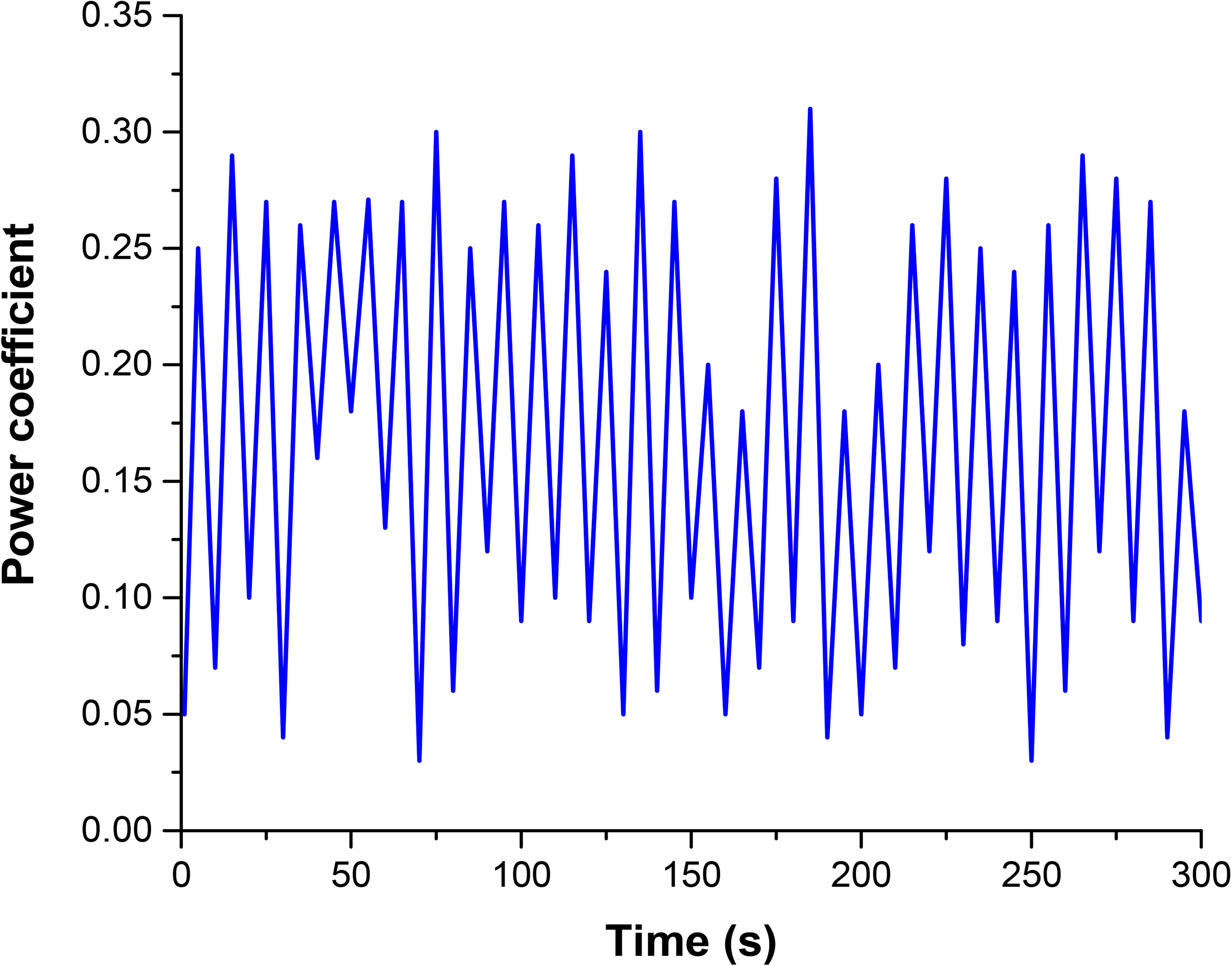
Time series of power coefficient.
The pitch control technique is a key tactic for increasing the effectiveness of the power generation system. The ANN, ANFIS, FLC, and RNN techniques are used to control the pitch angle for wind turbine. For this purpose, simulations for all four techniques are done in MATLAB. Rigorous experiments have been performed by changing different parameters like the number of epochs, hidden layer, and no. of neurons in hidden layers for different controllers. The real-time data of 5 MW wind turbine data is gathered for this study. Wind speed, power coefficient, and TSR are three inputs, and the output is the pitch angle. The basic block diagram of the proposed research methodology has been presented in Figure 5.
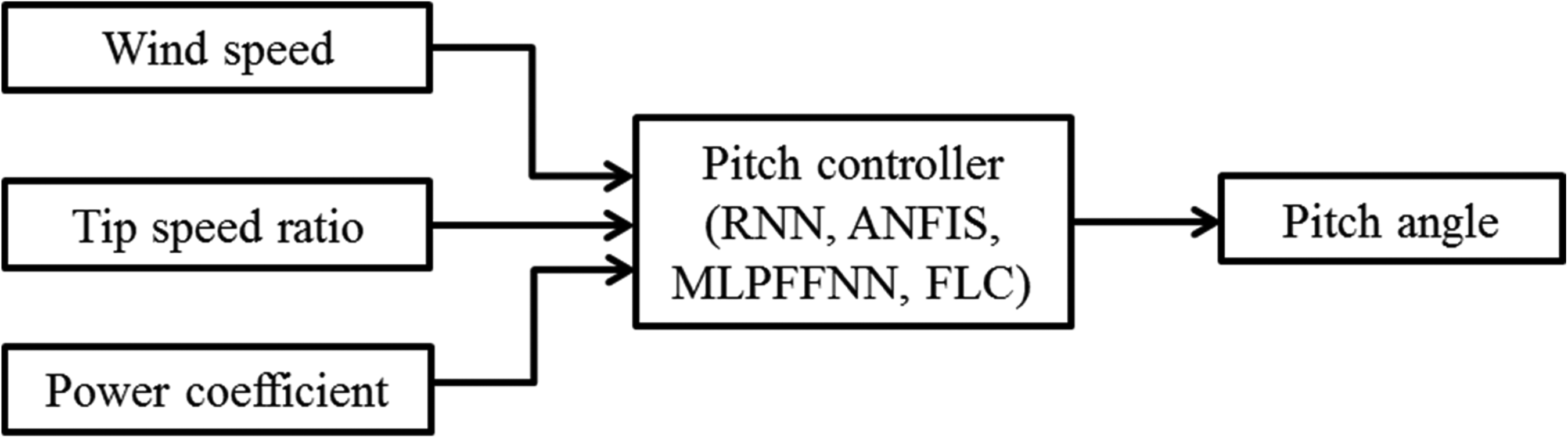
Block diagram of proposed research methodology.
Experimental results
Adaptive neuro-fuzzy inference system
The ANFIS analyses the input–output training data set, and a hybrid learning approach is utilized to program the system. Grid partitioning is employed in the creation of the fuzzy inference system (FIS). The type and number of input MFs are determined by the degree of data complexity in a given application. In a variety of tests, triangular MFs are used as a starting point before moving on to other MF types, such as Gaussian, bell-shaped, trapezoidal, etc. To choose the type and amount of input MFs that are most suited for the given data set, training and testing errors are estimated. The output MFs could be linear or constant. It has been found that the ANFIS model, which has four triangular MFs for each input, gives the least amount of error for constant MF type in the output. The results are not significantly improved by adding more epochs, and the system gets extremely slow and may even stop. It has been found that the learning process is decreased when the number of input MFs is increased from five to six. The number of input MFs cannot, therefore, be increased further. Table 3 presents the experimental findings for MFs with constant output.
Experimental results of ANFIS pitch controller using different types of input MFs, different no. of input MFs and constant MFs for output.

MSE: mean square error; RMSE: root mean square error.
Figures 6–8 display the trained input MFs for constant output MFs. As demonstrated in Table 3, training and testing errors generated by ANFIS utilizing four triangular input MFs are 0.000085 and 0.001068, respectively.

Trained MFs of wind speed for constant output MFs of ANFIS.

Trained MFs of TSR for constant output MFs of ANFIS. TSR: tip speed ratio.

Trained MFs of power coefficient for constant output MFs of ANFIS.
Multilayer perceptron feed-forward neural network
MLPFFNN is implemented in MATLAB through coding. The MLPFFNN is trained using the input–output training data set. There are exactly as many neurons in the input layer as there are input variables. Different numbers of neurons are selected for the hidden layer when building a multilayer feed-forward neural network, but only one neuron is selected for the output layer. According to Table 4, the tangent sigmoid “tan sig” is used to excite the neurons in the hidden layer while the linear activation function “purelin” is utilized to stimulate the neurons in the output layer.
Design parameters of MLPFFNN.

MLPFFNN: multilayer perceptron feed-forward neural network.
The error objective (error tolerance) is set to 1e-12 and 100, 500, and 1000 training epochs are chosen. The learning rate, or
The smallest training MSE and RMSE produced by MLPFFNN for 25 no. of neurons in the hidden layer and 500 no. of epochs are 2.17e-10 and 1.56e-5, respectively, as shown in Table 5. Table 5 presents the experimental findings for MLPFFNN.
Experimental results of MLPFFNN pitch controller using different no. of neurons in the hidden layer and different no. of epochs.
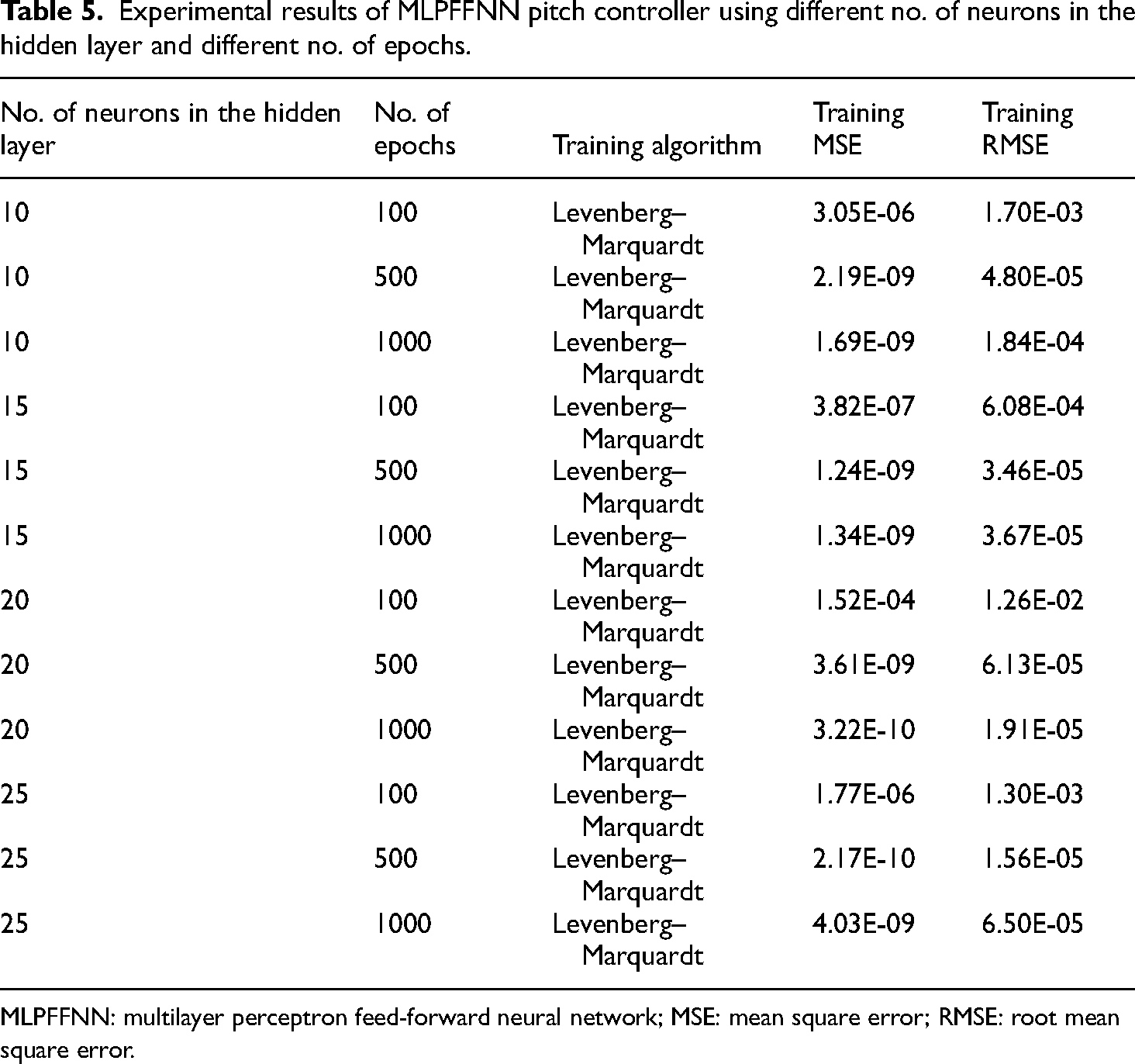
MLPFFNN: multilayer perceptron feed-forward neural network; MSE: mean square error; RMSE: root mean square error.
Training error for 25 no. of neurons in the hidden layer and 500 no. of epochs is depicted in Figure 9.

MPLFFNN training error for 25 neurons in the hidden layer and 500 epoch.
Recurrent neural network
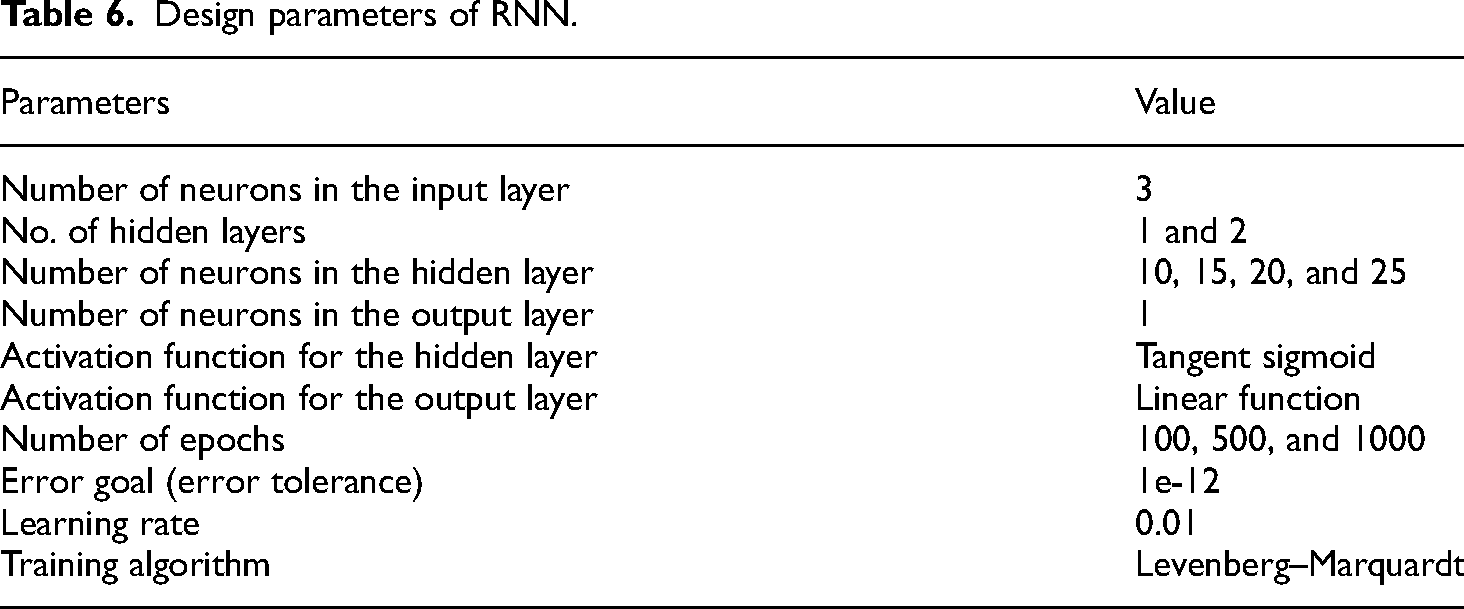
The RNN model is developed in MATLAB and the input–output training data set is used to train the system. The experiments are performed using one input layer, one and two hidden layers, and an output layer. A varied number of neurons are selected for both levels of hidden layers when building a RNN and one neuron is sent to the output layer (RNN). As shown in Table 6, the hidden layer neurons are triggered using the tangent sigmoid “tan sig,” while the output layer neurons are activated using the linear activation function “pure ln.”
Design parameters of RNN.
The smallest training MSE and RMSE produced by RNN for 15 no. of neurons in one hidden layer, and 1000 epochs are 3.28e-11 and 5.54e-6, respectively, as shown in Table 7. Table 8 presents the experimental findings of RNN using two hidden layers.
Experimental results of RNN pitch controller using different numbers of neurons in one hidden layer and different numbers of epochs.

MSE: mean square error; RMSE: root mean square error.
Experimental results of RNN pitch controller using different numbers of neurons in two hidden layers and different numbers of epochs.
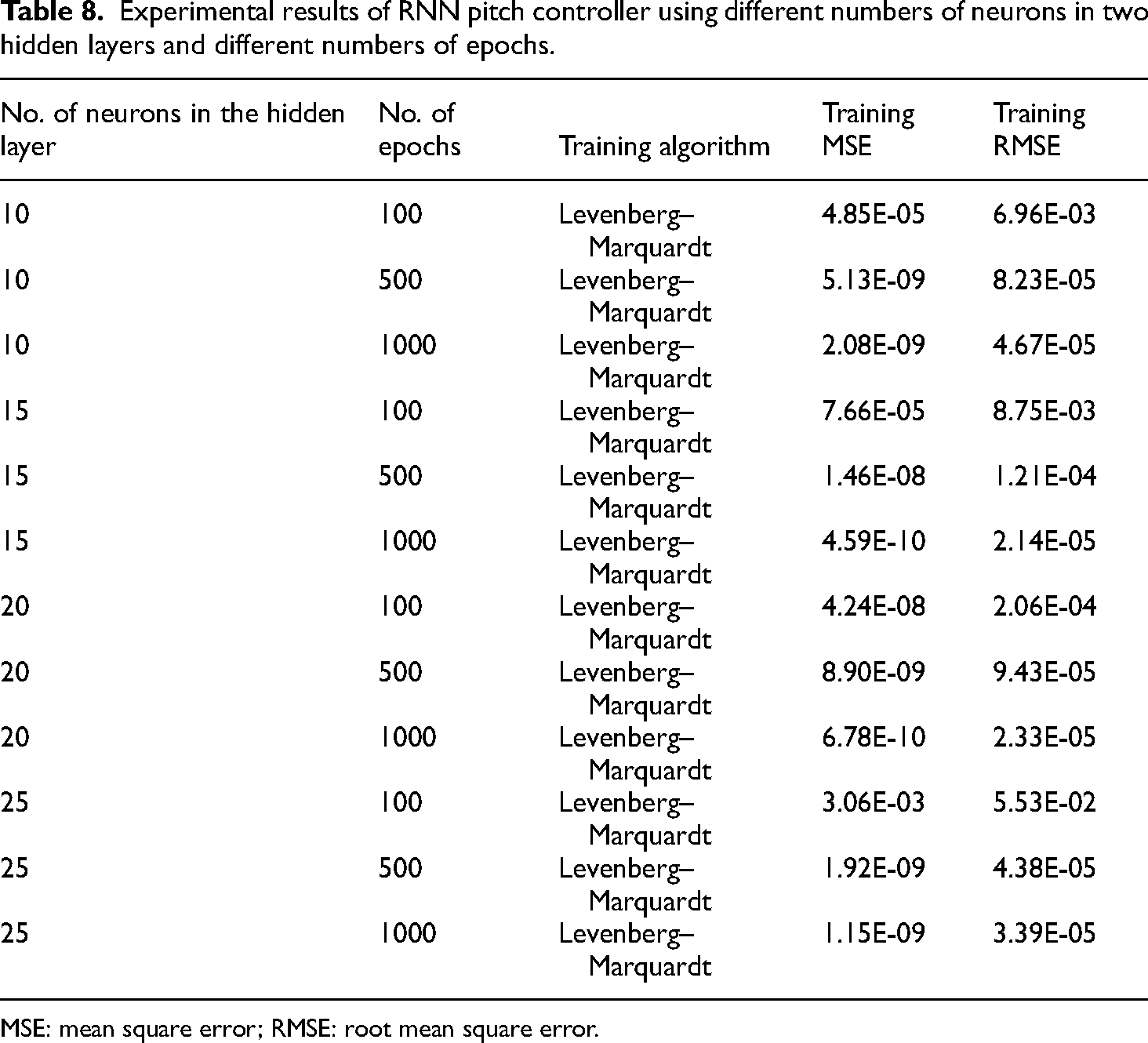
MSE: mean square error; RMSE: root mean square error.
Training error for 15 no. of neurons in the single hidden layer and 1000 no. of epochs is depicted in Figure 10.

RNN training error for 15 neurons in the hidden layer and 1000 epochs.
Fuzzy logic control
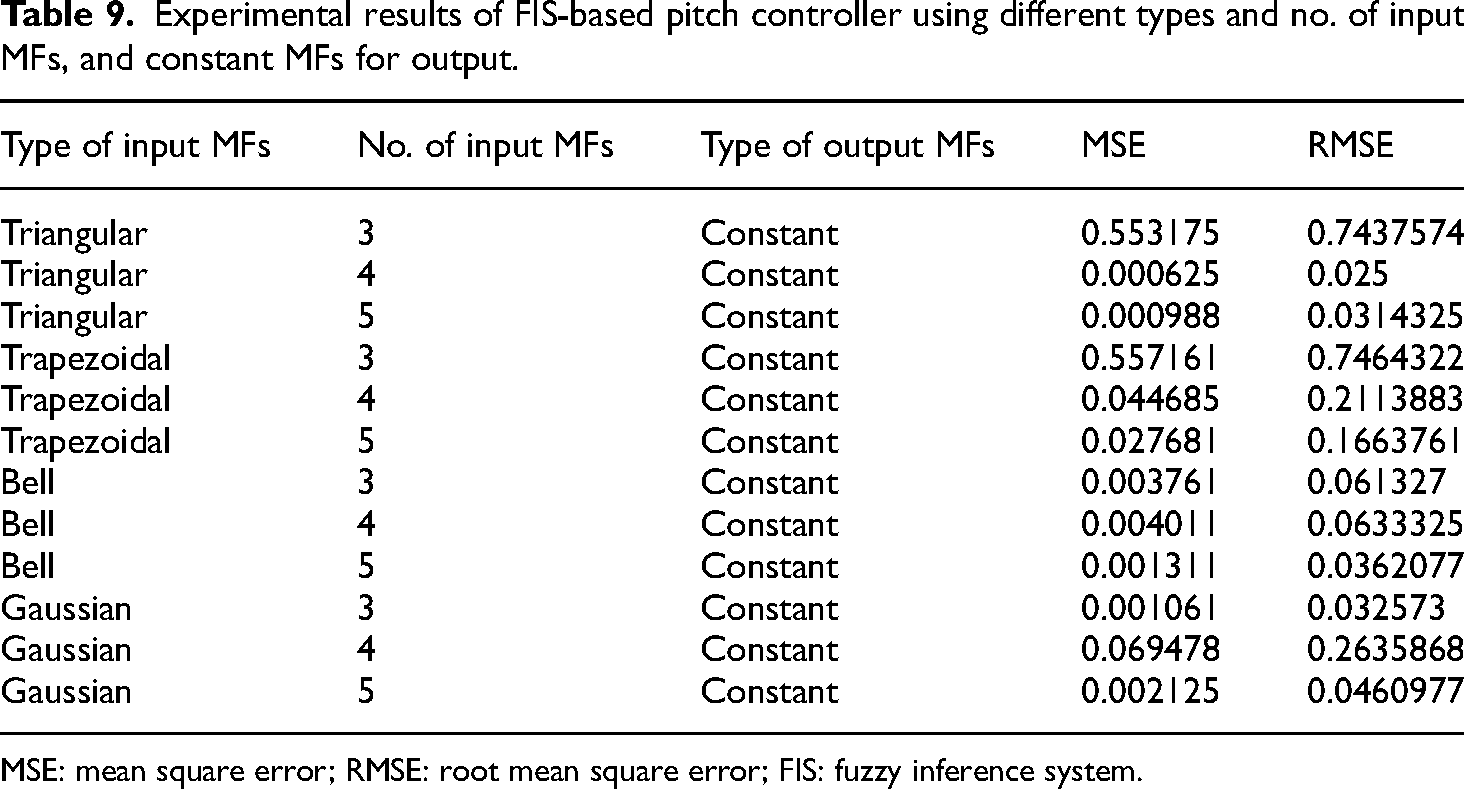
The FIS is designed in MATLAB by assigning different types of MFs to the input variables. In order to produce a specific output pitch angle for a particular combination of wind speed and rotor speed, fuzzy rules are built using IF and THEN expressions. The output MFs of the T–S fuzzy system might be linear or constant. In a variety of experiments, triangular MFs are used as a starting point before moving on to other MF types, such as bell-shaped, Gaussian, trapezoidal, etc. To choose the type and number of input MFs that are best suitable for the given dataset, MSE and RMSE are computed. It has been found that the FIS model, which has four triangular MFs for each input, gives the least amount of error for constant MF type in the output. The MSE and RMSE produced by FIS for four triangular MFs are 0.000625 and 0.025, respectively. Table 9 depicts the experimental findings for a FLC with constant output MF.
Experimental results of FIS-based pitch controller using different types and no. of input MFs, and constant MFs for output.
MSE: mean square error; RMSE: root mean square error; FIS: fuzzy inference system.
MFs plot for three inputs (wind speed, TSR & power coefficient) are shown in Figures 11–13.

Trained MFs of wind speed for constant output MFs of FIS. FIS: fuzzy inference system.

Trained MFs of tip speed ratio for constant output MFs of FIS. FIS: fuzzy inference system.

Trained MFs of power coefficient for constant output MFs of FIS. FIS: fuzzy inference system.
Discussion and conclusions
In this research, four different controllers ANFIS, MLPFFNN, RNN, and FLC are implemented to control the pitch angle of 5 MW VSWT. To develop the pitch controllers, the input–output data set is collected from the experimental setup. ANFIS is implemented in MATLAB using Triangular MFs as a beginning point in several experiments before moving on to other MF types, such as bell-shaped, Gaussian, and trapezoidal, etc. The system is trained for 100 epochs with a 0% error tolerance. ANFIS produced the least errors for four triangular input MFs with MSE of 8.5e-05 and RMSE of 9.22e-03. The MLPFFNN is developed in MATLAB using the Levenberg–Marquardt training algorithm. Simulations are done for different numbers of neurons like 10, 15, 20, & 25, and different numbers of epochs like 100, 500, and 1000. It has been observed that MLPFFNN produced the least error with MSE of 2.17e-10 and RMSE of 1.56e-05 for 25 no. of neurons in the hidden layer and 500 no. of epochs. Then, RNN is implemented using tangent sigmoid activation function for the hidden layer, and linear function for the output layer while the Levenberg–Marquardt algorithm is used for training purposes. Several simulations are performed for 10, 15, 20, and 25 neurons as well as for 100, 500, and 1000 epochs. It has been observed that for 15 neurons in the hidden layer and 1000 epochs, the RNN produced the least training error with MSE of 3.28e-11 and RMSE of 5.54e-06. Lastly, FLC is implemented using a fuzzy toolbox and MATLAB coding. In a variety of investigations, triangular MFs are used as a starting point before moving on to other MF types, such as bell-shaped, Gaussian, and trapezoidal, etc. FIS produced the least training error with MSE of 6.25e-04 and RMSE of 0.025 for four triangular input MFs.
Recording the least RMSE and MSE of RNN in comparison to MLPFFNN, ANFIS, and fuzzy logic-based pitch controllers, the RNN surpasses the other three controllers in terms of accuracy. The MSE and RMSE generated by various pitch control models are displayed in Table 10. Table 11 presents the comparison of the proposed RNN model with some other pitch controllers implemented by other researchers in the literature.
Performances indices for various controllers.
MLPFFNN: multilayer perceptron feed-forward neural network; FLC: fuzzy logic controller; MSE: mean square error; RMSE: root mean square error.
Comparison of proposed work with related work in literature.

MSE: mean square error; RMSE: root mean square error; PID: proportional integral derivate.
RNNs can process the time series data more effectively which makes them ideal for time series predictions. RNNs are versatile in handling data with variable input length. RNNs have better training efficiency due to sharing weights across time steps. RNNs have the property of memory retention which enables them to follow the pattern of previous data. RNN performance increases with adding more input parameters; on the other hand, ANFIS becomes more computationally complex with the increased number of fuzzy membership functions and IF-THEN fuzzy rules which decrease their prediction performance. Therefore, RNN models are more accurate and consistent in making predictions for time series data. The limitation associated with the proposed RNN is the gradient exploding which can be handled by squashing or truncating the gradient. The training can be challenging for data with long sequences and its training can be slower than other neural networks.
In the future, the suggested RNN-based model can be further enhanced by using techniques like PSO and GA. Granular neural networks, long short-term memory, and gated recurrent units can also be implemented to improve the results. The control scheme can be further examined on a physical floating offshore wind turbine structure. Moreover, future studies can be focused on IPC of wind turbine blades.
Footnotes
Declaration of conflicting interests
The authors declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This research was funded by Warsaw University of Technology, Faculty of Mechanical and Industrial Engineering from funds for the implementation of KITT4SME (platform-enabled KITs of artificial intelligence for an easy uptake by SMEs) project. The project was funded under the European Commission H2020 Program, under GA 952119 (![]() ). The APC was funded by Warsaw University of Technology, Warsaw, Poland. The work was supported in part by Researchers Supporting Project number (RSP2023R492), King Saud University, Riyadh, Saudi Arabia.
). The APC was funded by Warsaw University of Technology, Warsaw, Poland. The work was supported in part by Researchers Supporting Project number (RSP2023R492), King Saud University, Riyadh, Saudi Arabia.
Author biographies
Aamer Bilal Asghar received a PhD degree in Control Theory and Control Engineering from the School of Control Science and Engineering, Dalian University of Technology, Dalian, China in 2018, an M.S. degree in Electrical Engineering from Government College University Lahore, Pakistan in 2014, and the B.S. degree in Electronic Engineering from The Islamia University of Bahawalpur, Pakistan in 2008. He has 13 years of experience in Industry and Academia. Currently, he is serving as an assistant professor in the Department of Electrical and Computer Engineering (ECE) at COMSATS University Islamabad (CUI), Lahore campus, Pakistan. He is the HEC approved PhD supervisor and the in-charge of Instrumentation and Measurement LAB and Power Electronics LABs at the ECE dept. CUI, Lahore campus. He is the author and co-author of several SCI Impact Factor (IF) International Journal papers. His research interest areas include artificial intelligence, intelligent control, fuzzy logic control, artificial neural networks, ANFIS, genetic algorithms, machine learning, and renewable energy technologies.
Raza Ehsan received an MS degree in Electrical Engineering from COMSATS University Islamabad (CUI), Lahore campus, Pakistan in 2023, and a BS degree in Electronic Engineering from The Islamia University of Bahawalpur, Pakistan in 2008. His research interests include artificial intelligence, machine learning, and renewable energy technologies.
Khazina Naveed received an MS degree in Computer Science from COMSATS University Islamabad, Lahore campus, Pakistan in 2023 and a BS degree in Bioinformatics from the Department of Biosciences, COMSATS University Islamabad, Sahiwal, Pakistan in 2019. Currently, she is working as a lecturer at the Computer Science department, Bahria University, Lahore campus, Pakistan. Her research interest areas include artificial intelligence, machine learning, data mining, digital twins, computer programming, and bioinformatics.
Essam A. Al-Ammar (Senior Member, IEEE) received the MS degree from the University of Alabama, Tuscaloosa, AL, USA, in 2003, and the PhD degree from Arizona State University, Tempe, AZ, USA, in 2007. He worked as a Power/Software Engineer with Lucent Technologies, Riyadh, Saudi Arabia, for 2 years. He is currently a Professor at the Electrical Engineering Department, King Saud University, Riyadh. He published nearly 100 articles and 20 patents in energy and water. His current interests include high-voltage engineering, power system transmission and distribution, and renewable energy and smart grid.
Krzysztof Ejsmont is an assistant professor at the Faculty of Mechanical and Industrial Engineering at Warsaw University of Technology (WUT). He obtained his PhD in Management Science from the WUT. His major expertise is in management, industrial engineering, and sustainable manufacturing. His current research focuses on the dependencies of sustainability and Industry 4.0 & assessment of intelligent technologies (e.g. IoT). He participated in a few international R&D projects, including ones funded by the EU (E-SCOP, KITT4SME). He was the coordinator of a global research project on “Industry 4.0 in Production and Aeronautical Engineering” (WUT + 10 partners from Europe, USA, Japan, Australia, and South Korea). Currently, he participates in the H2020 project “Platform enabled KITs of artificial intelligence FOR an easy uptake by SMEs – KITT4SME” (project number 952119). He has many publications in journals with good IF and CiteScore such as Journal of Cleaner Production, IEEE Access, Packaging Technology and Science, CMC-Computer, Materials & Continua, Cogent Business & Management, Energies, Sustainability, and Resources.
Mirosław Nejman has MSc in Automation & Robotics and PhD in Mechanical Engineering from Warsaw University of Technology. His major expertise is in factory automation. His recent research was about real-time in situ monitoring of manufacturing resources; using computational intelligence to anticipate failures and outages, and design of CPS. He participated in several EU and industry-funded projects (e.g. Implementation of Smart Manufacturing in Pratt & Whitney factory of airplane engines). He is certified LabView Developer. He participated in a global research project “Industry 4.0 in Production and Aeronautical Engineering” (WUT + 10 partners from Europe, USA, Japan, Australia and South Korea). Currently, he participates in the H2020 project “platform enabled KITs of arTificial intelligence FOR an easy uptake by SMEs – KITT4SME” (project number 952119).