
Abstract
Aiming at the problems of poor adjustment effect, weak anti-disturbance ability, and low robustness of the traditional sliding mode algorithm for permanent magnet synchronous motor speed sensorless, a permanent magnet synchronous motor speed observation method combining super-twisting sliding mode control algorithm and fuzzy control is proposed to accelerate the convergence speed of the system and improve the anti-disturbance ability. Fuzzy rules are used to solve the problem of obtaining the upper bound of the boundary function in the super-twisting algorithm. Moreover, the fuzzy algorithm is used to output the variable sliding mode gain instead of the fixed sliding mode coefficient to improve the system robustness and suppress the jitter. The simulation results show that the overshoot of the control system is 4%, the lag time is not more than 0.003 ms, the speed error is not more than 1%, and the response and adjustment time is not more than 0.02 s. The proposed control strategy improves the tracking accuracy and response speed of the system, suppresses the sliding mode chattering, and enhances the anti-interference ability of the system.
Keywords
Introduction
With the intensification of the energy crisis and the advancement of the carbon peak strategy. Technologies such as wind power generation, photovoltaic power generation, and new energy have been extensively developed.1–4 Permanent magnet synchronous motor5,6 (PMSM) has been widely used in industrial production due to its small size, simple structure, low loss, and easy maintenance. To achieve PMSM high-performance control,7,8 it is necessary to obtain rotor position and speed information, which is generally obtained through a mechanical sensor installed on the shaft. Although the acquisition is simple, it will not only increase the size and cost of the motor but also cause failure. The rate is high, and it cannot be used reliably in harsh conditions, which increases the cost and complexity of the system. Therefore, the research on speed sensorless control technology9,10 is of great significance. Literature11,12 used a speed sensor to replace the traditional photoelectric encoder, which reduced the size of the motor and improved reliability.
Sensorless technology adopts the Back-EMF method based on the motor model in medium-speed and high-speed control. It includes extend state observe (ESO), extended Kalman filter (EKF), model reference adaptive control (MRAS), sliding mode observer (SMO), model predictive control (MPC), etc. ESO13,14 can only be observed after processing the relative order information of the system. EKF15,16 matrix has a large amount of calculation, high complexity, poor real-time performance, and large delay. MRAS17,18 requires accurate model feedback parameters and cannot be used in large speed ranges; among them, SMO19–24 is simpler than other methods. SMO has low requirements for the accuracy of the system model, is insensitive to parameter changes and external interference, and has strong robustness. It has become a research hotspot of speed sensorless technology of PMSM. However, it is the characteristics of the sliding mode control structure that bring strong robustness, but also cause system chattering, which hinders its application in practical engineering. The traditional SMO has the following problems: the discontinuity of the switching function when the SMO algorithm is running at medium and high speeds leads to high-frequency chattering in the system, and the use of a low-pass filter when calculating the rotor position will cause amplitude and phase offset. When extracting the rotor position information, the arctangent function is used for calculation, and the look-up table method will occupy a large amount of processing memory of the single-chip microcomputer, which is difficult to achieve the expected accuracy. In view of the above problems, scholars have done a lot of research. Reference 25 used a neural network strategy to obtain synovial gain. Although this scheme can eliminate chattering, the design of variable parameters is more complex. Reference 26 used the improved reaching rate to reduce the chattering of the system caused by sliding mode control. Although the purpose is achieved to a certain extent, when the control deviation is zero, the sliding mode gain is also zero, which is not conducive to the control of the system. Reference 27 used multiple integrals to suppress sliding mode chattering. However, due to the increase in the number of integrals, the computational complexity of the algorithm will increase exponentially, the control system is complex, and the hardware requirements are high. It cannot be widely used in the industrial field. Reference 28 used the fractional integral sign function to design the reaching law, which reduced the chattering and improved the response speed, but there was a steady-state error. Reference 29 used the idea of multi-sliding mode surface switching to solve the problem of low-pass filter amplitude offset. Although the control problem of PMSM is improved, too many sliding modes of surface switching are difficult to achieve, and the robustness of the system is also weakened. In Reference, 30 a full-order SMO was designed, and good control effects were obtained at medium and high speeds. However, as the motor speed decreases, the Back-EMF gradually decreases, and its observation accuracy also decreases. Reference 31 applied the super-twisting algorithm in the second-order sliding mode algorithm to the speed sensorless, which reduced the system error while weakening the chattering. However, due to the fixed sliding mode gain, the dynamic response time is increased, and the anti-interference ability is limited. The second-order observer combining the super-twisting sliding mode theory with the model reference adaptive theory in Reference 32 can improve the accuracy of position detection while suppressing chattering but requires accurate model feedback parameters. Reference 33 combines a super-twisting algorithm with sliding mode control to suppress chattering and detect more accurately, but the overshoot is too large and the estimation accuracy is not accurate. Reference 34 proposed a generalized super-twisting sliding mode algorithm to reduce chattering and achieve finite-time speed control, but the steady-state analysis is complex and has many control parameters. Reference 35 proposed a method of adaptive adjustment of super-twisting sliding mode gain. Although the anti-interference ability is strong, the adaptive law is difficult to determine and the convergence speed is slow. Reference 36 designed a fuzzy sliding mode switching controller based on adaptive law. The fuzzy algorithm is used to approximate the switching term of the sliding mode control law and weaken the system chattering, but the determination of the switching function lacks basis. Reference 37 proposed an adaptive fuzzy SMO control method to reduce the dynamic response time and weaken the chattering, but its sliding mode surface convergence speed is slow, and the use of the arctangent method to estimate the rotor position will lead to high-frequency chattering error is amplified.
To overcome the problems of poor adjustment effect, low tracking accuracy, slow convergence speed, and weak robustness of the existing speed control strategy, A fuzzy super-twisting sliding mode control (FSTSMO) is designed, which can eliminate the phase delay generated by the traditional observer, accelerate the dynamic response and sliding mode convergence speed, obtain accurate Back-EMF, and improve the rotor position accuracy. In this design, fuzzy logic is used to estimate the uncertain boundary, which solves the problem that the super-twisting algorithm is difficult to obtain the upper bound, the fuzzy controller self-adjusts the sliding mode gain to reduce buffeting, realizes the continuous switching of the sliding mode, improve the system's resistance to the outside world and the robustness of internal parameter perturbation, achieves the precise speed sensorless control of the PMSM, and better improves the control performance of the PMSM. To a certain extent, the computational complexity is reduced, and the fast dynamic response and anti-interference performance are effectively improved. Compared with the existing traditional SMO, the proposed algorithm has great improvement in overshoot, lag time, speed error, response and adjustment time.
Permanent magnet synchronous motor system model
In the process of constructing the surface-mounted PMSM model under ideal conditions, References38,39 show that the following assumptions are usually made: the saturation of the motor core is neglected; the magnetic circuit is linear, and the inductance parameters remain unchanged; ignoring the hysteresis loss in the motor; the rotor magnetic field distribution is sine wave; the current is symmetrical three-phase sinusoidal current, and there is no damping winding on the rotor.
The mathematical model of PMSM in the rotating coordinate system:


Since this paper studies the surface-mounted permanent magnet synchronous motor (SPMSM), therefore



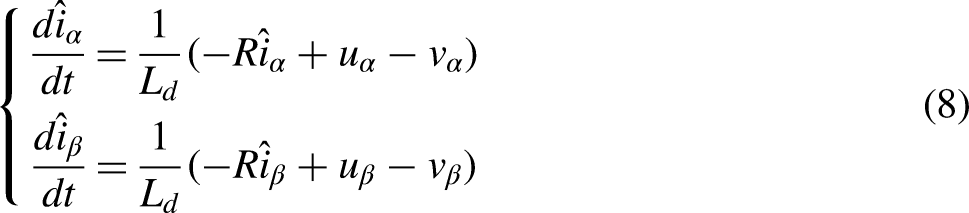
To facilitate the SMO to observe the Back-EMF, the voltage equation of the motor in Equation (4) is changed to the form of the current equation:

The electromagnetic torque equation for the SPMSM is

Design and existing problems of sliding mode observer
To obtain the estimated value of the extended Back-EMF conveniently, and then obtain a better control function. Referring to the literature,40,41 the SMO is designed as:
Subtracting Equation (6) and Equation (8), the error equation of the stator current can be obtained as:

According to Equation (8), the difference between the stator current observation value and the actual current value can be set as the sliding mode surface, and the switching function of the sliding mode surface is:







The estimated motor speed is:

Design of fuzzy super-twisting sliding mode observer
Super-twisting control algorithm
Compared with second-order algorithms such as twisting algorithm, sub-optimal algorithm, prescribed convergence law algorithm, quasi-continuous algorithm, and drift algorithm, to weaken the shortcomings of traditional SMO chattering problems as much as possible, A. Levant proposed a super-twisting algorithm theory. References42,43 concluded that the super-twisting algorithm converges in finite time and improves robustness in the case of disturbance and no disturbance. The super-twisting algorithm has the advantage that it does not need to calculate the derivative and extremum of the sliding mode variable. For a dynamic system, the following are:

For the control problem of Equation (9) in the system, it is actually to find a control

In practical control, the stability condition of the gain coefficient of

Fuzzy control rule.


Simulation parameters of PMSM.

The super-twisting control algorithm weakens the chattering of the one-dimensional sliding mode control system through the series of high-order sliding modes, thereby ensuring the continuity of the output. Because only the sliding modulus is needed to complete the calculation, the computational complexity is reduced to a certain extent, and the rapidity and anti-interference of the system are effectively improved. The corresponding value of k in the integral term can reduce the discrete amount and weaken the buffeting. However, the value of k depends on the upper bound of the disturbance. If the upper bound is large, the value of k is also large, but the increase of the k value will lead to the chattering of the sliding mode system. The introduction of fuzzy control solves the problem that the upper bound of the boundary function in the super-twisting control algorithm is difficult to obtain in practice, which improves the observation accuracy and broadens the effective observation range.
Fuzzy controller design
Fuzzy logic control44–46 (FLC) is a nonlinear intelligent control strategy. Because the control strategy has a strong ability of fuzzy information processing, it can achieve a high level of the controller by setting membership function and fuzzy rules for too complex system or unknown system that cannot accurately know the mathematical model of the system. The flow chart of fuzzy control is shown in Figure 1.

Fuzzy control structure.
The fuzzy control design is 2-dimensional, and the system state variables are selected as:
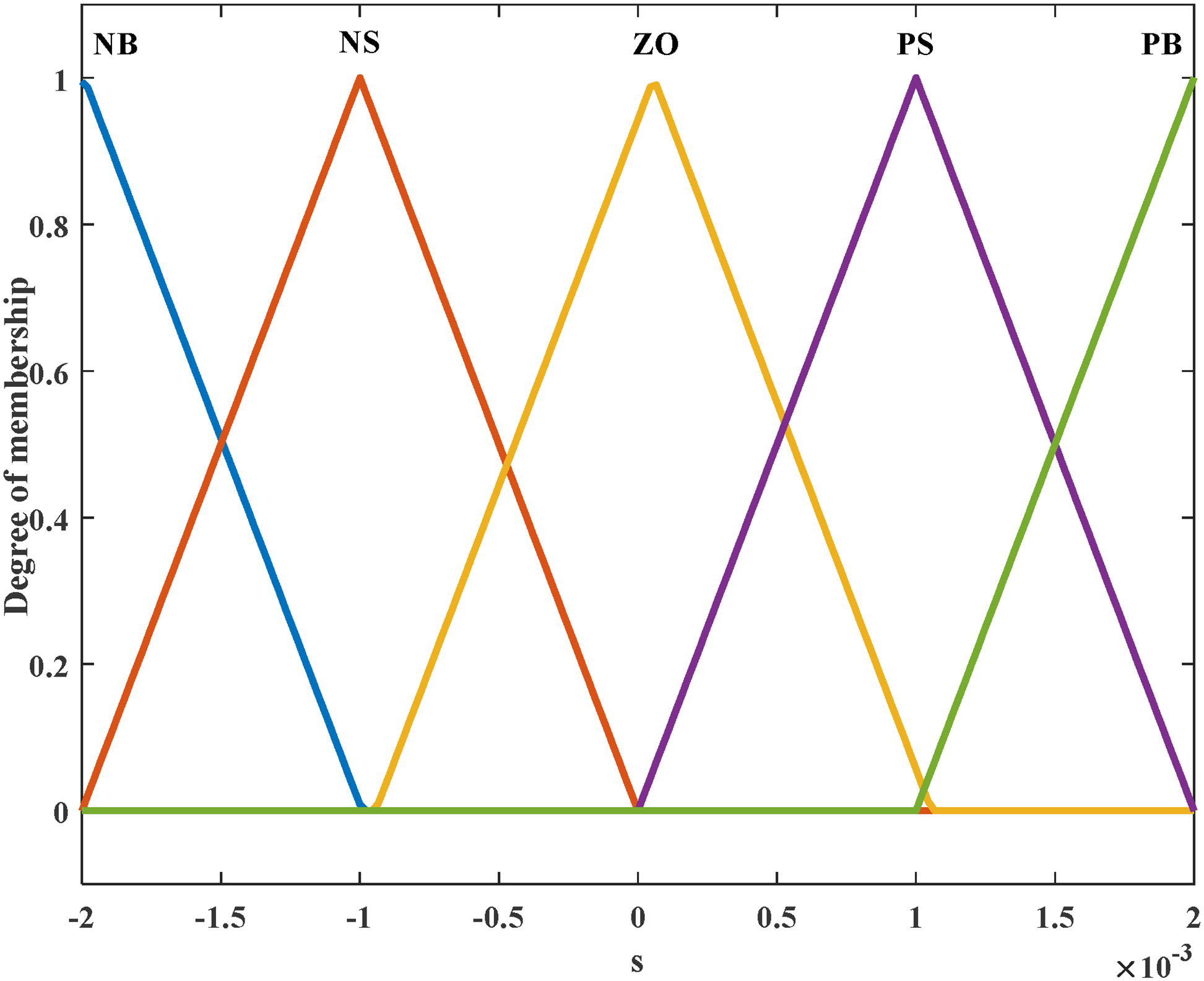
The membership function of input s.

The membership function of input

The membership function of output k.
Construction of fuzzy super-twisting sliding mode observer
Substituting 


Equation (23) minus Equation (6) to get:


Observer based on fuzzy super-twisting sliding mode.
Steady-state error analysis
According to Lyapunov's theorem, the state variable is selected as:
Let 

In formula (28), the situation before the system reaches the sliding mode surface is given by the Lyapunov function



Choose a 


Simulation and experimental study
Diagram of system structure
To verify the effectiveness of the proposed fuzzy super-twisting sliding mode sensorless control algorithm, a detailed experimental study was carried out from simulation analysis to physical verification. The overall control block diagram of the PMSM speed sensorless control system is shown in Figure 6.

Sensorless control system of PMSM based on fuzzy super-twisting sliding mode.
Simulation analysis
To verify the accuracy and rapidity of the super-twisting fuzzy algorithm proposed in this paper, three simulation models of traditional sliding mode, super-twisting sliding mode, and fuzzy super-twisting SMOs are established by using MATLAB/Simulink. The verification is carried out from two aspects of the constant speed variable load and variable speed variable load. Simulation conditions: fixed step size obe3, simulation time 0.7 s. References49,50 shows that the parameters of the PMSM used in the simulation are shown in Table 2.
Constant speed variable load
Aiming at the complex and variable working conditions of PMSM, a constant speed variable load test is designed. The initially given speed is 1000 r/min, and it runs at a constant speed. When t is in the range of 0.1–0.2 s, the torque increases from 0 to 5 N m, and in 0.2–0.4 s, it operates with constant torque. When t is suddenly loaded to 10 N m in 0.4 s, when t is in the range of 0.4–0.6 s, it operates at a constant torque. Constant torque operation, when t is between 0.6 and 0.7 s, the torque drops from 10 to 5 N m.
The simulation results of torque, speed, and speed error under load disturbance by SMO, STSMO, and FSTSMO are shown in Figures 7–9, and the simulation data of speed are shown in Table 3. It can be seen from Figure 7 that at a given speed of 1000 r/min, when the load torque changes suddenly, compared with STSMO and SMO, FSTSMO has a greatly shortened speed overshoot time, less pulsation, and faster dynamic response. There is no obvious fluctuation in the speed of increase or decrease. It can be seen from Figure 8 that the speed waveform obtained by the SMO algorithm has chatter and errors, and has burrs; although the chatter and burrs are significantly reduced by STSMO, they still exist; while the speed waveform obtained by the FSTSMO algorithm is smooth and has no fluctuations. It can be seen that the overshoot time is significantly reduced, the pulsation phenomenon is weakened, and the dynamic response time becomes faster. It can be seen from Figure 9 that the speed observation error of SMO is about 33.564 r/min when it is stable; the speed observation error of STSMO is about 2.835 r/min when it is stable, and the speed observation error of FSTSMO is about 0.158 r/min when it is stable.

Torque contrast response under constant speed variable load.

Speed response under constant speed variable load.
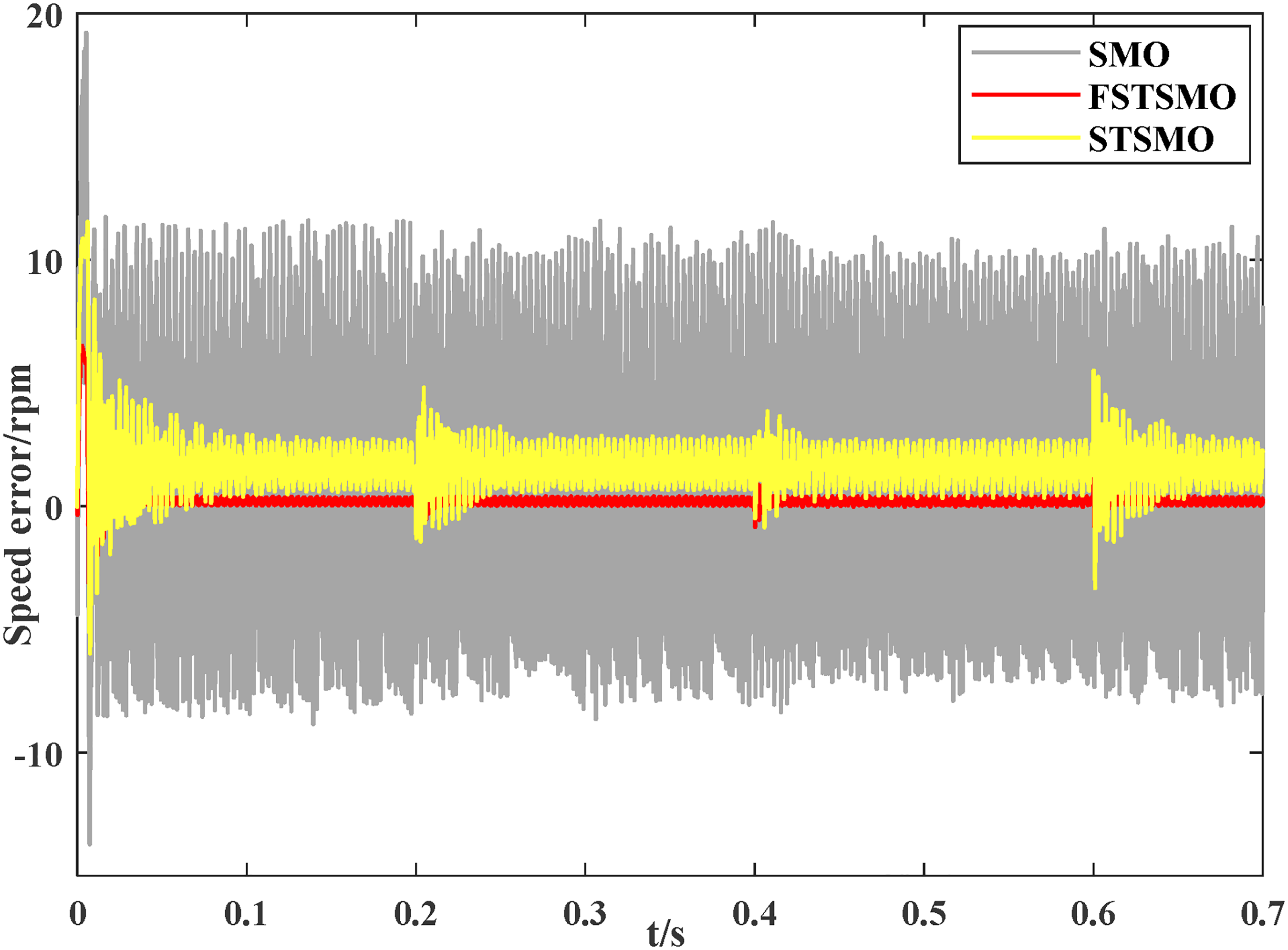
Speed error response under constant speed variable load.
Simulation data of rotating speed.

Varying speed and varying load
Aiming at the complex and variable working conditions of PMSM, a variable speed, and variable load test is designed. The initially given speed is 950 r/min, and it runs at a constant speed. When t is 0.15–0.2 s, the torque increases from 0 to 5 N m, and the constant torque runs in 0.2–0.4 s; when t is 0.4 s, it is suddenly loaded to 10 N m, and t is 0.4–0.7 s, Constant torque operation. The set speed change exceeds the rated speed to verify the accuracy and reliability of the FSTSMO algorithm. The motor runs at a constant speed of 950 r/min when t is 0–0.25 s. When t is 0.25 s, the speed suddenly increases to 1200 r/min and then runs at a constant speed until the end of the simulation.
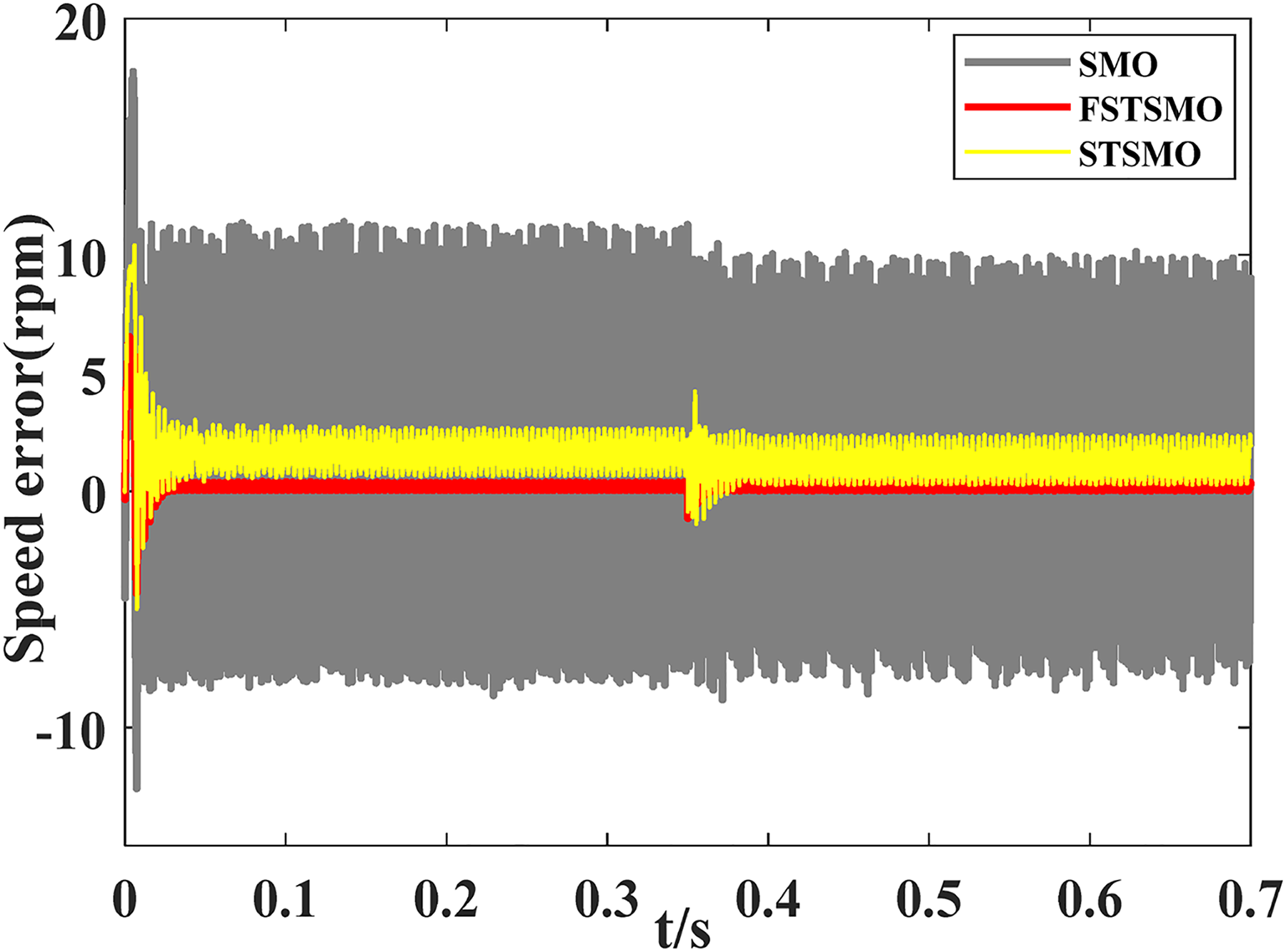
The simulation results of torque, speed, and speed error under load disturbance by SMO, STSMO, and FSTSMO are shown in Figures 10–12, and the simulation data of speed are shown in Table 4. It can be seen from Figure 10 that the waveform obtained by the SMO algorithm has serious chattering and obvious burr; the velocity waveform obtained by the STSMO algorithm has flutter and error. The adjustment time is significantly reduced, the pulsation phenomenon is weakened, the dynamic response time is faster, and the immunity to interference is better. It can be seen from Figure 11 that the overshoot of the initial position FSTSMO is smaller than that of STSMO and SMO, and it has a strong tracking ability when the load changes, the overshoot of the speed has been significantly suppressed, and the dynamic response is faster. It can be seen from Figure 12 that when the speed is 950 r/min, the observation error of SMO reaches a steady speed of about 13.173 r/min; at 1250 r/min, the observation error of SMO reaches a steady speed is about 14.275 r/min; the observation error of STSMO reaching a steady speed is about 3.855 r/min, and the observation error of FSTSMO reaching a steady speed is about 0.169 r/min.

Torque contrast response under varying speed and varying load.

Speed response under varying speed and varying load.

Speed error response under varying speed and varying load.
Simulation data of rotating speed.

Comparison of parameter perturbation conditions
When the step speed is set at 0 s, 1000 r/min, t is suddenly loaded to 5 N m in 0.35 s, and the speed tracking of three kinds of observers is compared and analyzed when the resistance is increased by 10% and the inductance is increased by 5%.
When the resistance parameter is increased by 10%, the speed tracking waveform of the three observers is shown in Figure 13, the speed error is shown in Figure 14, and the simulation data statistics are shown in Table 5. SMO and STSMO adopt fixed sliding mode gain, and the system robustness is poor. When the resistance parameter is perturbed, the rotational speed error is about 19.024 r/min under the control of the SMO strategy, 1.925 r/min under the control of the STSMO strategy, and 0.167 r/min under the control of the FSTSMO strategy. SMO and STSMO have relatively low observation accuracy and large buffeting, while FSTSMO has high observation accuracy and small buffeting, and excellent robustness when resistance parameters are perturbed.

Speed response diagram under resistance perturbation.
Speed error response diagram.
Simulation data of rotating speed when resistance changes.

When the inductance parameter is increased by 5%, the speed tracking waveform of the three observers is shown in Figure 15, the speed error is shown in Figure 16, and the simulation data statistics are shown in Table 6.

Speed response diagram under inductance perturbation.

Speed error response diagram.
Simulation data of rotating speed when inductance changes.

As can be seen from equation (1), PMSM is more sensitive to inductance parameter perturbation than resistance parameter perturbation. As can be seen from Figure 16, when the inductance parameter is increased by 5%, the rotational speed error is about 53.838 r/min under the control of SMO policy, about 41.089 r/min under the control of STSMO policy, and about 0.166 r/min under the control of FSTSMO control policy. SMO and STSMO control strategies are more robust to chattering, and FSTSMO control strategies are more robust to perturbation of inductance parameters.
From the above simulation results, it can be seen that the fuzzy superhelical sliding mode algorithm proposed in this paper can quickly and stably follow the given motor torque under the conditions of constant speed variable load and variable speed variable load when different forms of external disturbances are applied. The system responds quickly and smoothly. The speed drop of the motor speed is low in the process of sudden loading and unloading, and the adjustment time is short. Under the premise of good stability, the system has superior fast performance, can effectively suppress chattering, and has good anti-disturbance characteristics while maintaining high estimation accuracy.
Conclusion
As an environmentally friendly, low-carbon motor, with huge market demand and broad development prospects, PMSM is widely used in industry, agriculture, aerospace and other important fields. In order to solve the problem of speed buffeting and poor robustness in traditional SMO speed observers, in this paper, based on the combination of fuzzy control and superhelical algorithm, an FSTSMO sensorless control algorithm is designed.
The fuzzy controller is used to adjust the synovial gain online, weaken the observation buffering, improve the overall observation accuracy of the system, and reduce the overshoot time in the dynamic response stage of the system. The introduction of fuzzy rules improves the robustness of the system and solves the difficult problem of obtaining the upper bound of the boundary function in the superhelix algorithm. Compared with the traditional sliding mode control strategy with fixed sliding mode gain, the observer has enhanced anti-interference ability and can effectively track the actual speed when the external load is disturbed and the internal parameter is perturbed. The buffeting of the 1-D sliding mode control system is weakened by using the superspiral control algorithm to ensure continuous output. Compared with the traditional first-order linear SMO, the implementation algorithm of the second-order SMO is complex, but the research content of this paper has certain reference significance for the application of higher-order sliding mode theory in motor control systems. In the process of implementation, this control algorithm has a large amount of computation and certain defects at low speed. The next step will focus on the optimization problem of this algorithm at low speed to improve the ease of use, stability and robustness of the control system.
Footnotes
Acknowledgments
This work was supported by a project of the Department of Education of Jilin Province: Research on Topology Circuit and Control of Multi Port DC/DC Transformer (Grant number JJKH20240084KJ), Graduate Innovation Program Project of Beihua University (Grant numbers 2022006, 2023046), and Science and Technology Development Program of Jilin Provincial Science and Technology Department (Grant number 20230204093YY).
Data Availability
The data used to support the findings of this study are available from the corresponding author upon request.
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This work was supported by the Jilin Provincial Science and Technology Department, Graduate Innovation Program Project of Beihua University, Department of Education of Jilin Province (Grant numbers 20230204093YY, 2022006, 2023046 and JJKH20240084KJ).
Author biographies
Chao Song is a graduate student majoring in electrical engineering. His research are servo motor control and drive research.
Dejun Liu is a professor at the Electric Engineering in Beihua University. His research are electric drive and nonlinear control theory.
Letian Ren is a graduate student majoring in electrical engineering. His research interests are power electronics and power transmission.
Junjie Han is a graduate student majoring in electrical engineering. His research is precision servo control.
Yuqi Jin is a graduate student majoring in electrical engineering. Her research interests are motor control and linearity control.
Yanming Cheng is a professor at the Electric Engineering in Beihua University. His areas of research interest are compatibility between wireless communications system and micro grid and smart grid.
Xiang Li is a graduate student majoring in electrical engineering. His research are Servo motor control and intelligent algorithm optimization.
Hao Zhang is a graduate student majoring in electrical engineering. His research are Servo motor control and intelligent algorithm optimization.