
Abstract
Aiming at the problems of high cost, increased volume, low reliability, and environmental interference caused by sensor installation on permanent magnet synchronous motor, estimation method for motor speed and rotor position is proposed based on iterated cubature Kalman filter algorithm and applied to permanent magnet synchronous motor sensorless control. First, discrete mathematical model of permanent magnet synchronous motor in α-β coordinate system is established. Then, based on cubature Kalman filter and iterated cubature Kalman filter, simulation model of sensorless vector control system with dual closed-loop of permanent magnet synchronous motor speed and current is established. Also, simulation verification of two working conditions with given rotation speed and load is carried out. Finally, hardware experimental verification platform is built based on TMS320F28335 chip. Both simulation analysis and experimental results show that iterated cubature Kalman filter application to sensorless control of permanent magnet synchronous motor demonstrates good anti-load variation interference, stable motor operation, high motor speed and rotor position estimation accuracy, which suits the application with high requirement for precise motor control and mean important reference value and promotion significance.
Keywords
Introduction
In recent years, with the continuous improvement and perfection of performance of permanent magnet materials, permanent magnet synchronous motor (PMSM) has gained rapid development. Owing to its simple structure, small size, high power factor, high torque–current ratio, low moment of inertia, easy heat dissipation and maintenance, it is widely applied in electric vehicles, robots, household appliances, numerical control machine tools, aerospace, and so on, occupying an increasingly important position in motor system. 1
In the conventional PMSM control method, mechanical sensors such as resolver, photoelectric encoder, tachogenerator, and so on, are usually used to detect magnetic pole position and rotation speed of motor rotor so that motor speed and torque control is achieved. However, mechanical sensor not only increases volume and cost of PMSM control system, but also is unsuitable for special environments with high temperature, high humidity, high vibration, and so on. More importantly, coaxiality of mechanical sensor and motor installation will also seriously affect motor control accuracy, limiting low cost and high precision development of PMSM. To extend PMSM to high precision application fields, many scholars have carried out fruitful studies on PMSM sensorless control technology.2,3
PMSM sensorless control technology is to collect part of state quantity (such as current and voltage) of the motor, make real-time estimation of rotor position and speed of the motor through different estimation methods, thus realizing closed-loop control, improving control precision and anti-interference capability, so that various defects on speed control system owing to inaccuracies in application of mechanical sensor feedback data can be avoided.
In recent years, scholars have proposed a variety of control methods for PMSM sensorless control. For example, literatures4–6 apply high frequency injection method to PMSM sensorless control. This method shows better control effect when motor runs at low speed, but there will be high frequency noise problem during operation at high speed, which requires special hardware for circuit processing and also requires the motor to have a salient pole effect, so the limitations are obvious. Chen et al. 7 and Wang et al. 8 propose sliding mode observer method, which has the advantages that the sliding mode is insensitive to system parameter perturbation and external interference, but also faces buffeting problem that affects estimation accuracy and resists improvement of control precision. Literatures9–11 propose PMSM sensorless control method based on extended Kalman filter (EKF), which achieves good control effect. However, EKF algorithm needs calculation of complex Jacobian matrix, involves big calculation amount, poses high requirements on processor performance, and demands accurate motor mathematical model which is very difficult to achieve. Park and Wang 12 and Liu et al. 13 propose unscented Kalman filter (UKF) algorithm which has high estimation accuracy. With vector and matrix operations to calculate mean and covariance, there is no need to calculate Jacobian matrix, but it has the disadvantages of long running time, easy filtering, and divergence. Hao and Lu 14 and Liu et al. 15 propose cubature Kalman filter (CKF) algorithm, but CKF has the disadvantages of slow convergence speed and reduced filtering accuracy in case of sudden system state change.
Aiming at the shortcomings of the above methods, such as low estimation accuracy, dependence on motor parameters and computational complexity, this article proposes PMSM sensorless control method based on iterated cubature Kalman filter (ICKF). First, discrete model of PMSM is established by Euler method. Second, PMSM space vector control system is constructed using motor rotor position and speed signal estimated by ICKF algorithm to achieve sensorless control of PMSM. Finally, estimation accuracy of the ICKF algorithm is verified via simulation and motor bench experiment. Compared with CKF algorithm, the proposed estimation algorithm has higher filtering accuracy and stability, and also demonstrates stronger anti-interference to load changes.
PMSM discrete mathematical model
According to the link between PMSM motion characteristics and different physical quantities in motor operation, using the hidden pole PMSM (L = Ld = Lq), nonlinear equation of PMSM based on α-β coordinate system can be obtained via the principle of coordinate transformation, as shown in equation (1) 16

where L is stator inductance,
According to formula (1), PMSM nonlinear mathematical model equation can be rewritten into the form of state equation

where
Therefore, by combining equations (1) and (2), it can be obtained that


Discretize the mathematical model of PMSM according to Euler method, then

Let the sampling time be T, then in equation (6)


According to equations (2)–(9), a discrete mathematical model of PMSM based on ICKF algorithm can be established.
ICKF algorithm
CKF algorithm is a recently proposed filter algorithm for nonlinear systems. Based on spherical-radial cubature criterion, through new points generated after transfer of some cubature points with equal weights by nonlinear system equation, the algorithm predicts system state of the next moment. There is no need to linearize the system model,17–19 CKF has advantages of slow convergence rate and decreased filtering accuracy in case of sudden change of the system state.
In this article, Gauss-Newton iterative algorithm is fused to CKF algorithm, and ICKF algorithm-based PMSM sensorless control method is proposed. The specific process is as follows:
For a discrete nonlinear system, its state equation and measurement equation can be written as

CKF algorithm produces a set of equal-weight volume points via spherical-radial cubature criterion, and then calculates mean and covariance of the nonlinearly transformed random variables in accordance with volume numerical integration principle. That is, CKF algorithm first calculates the basic volume point and the corresponding weight using equations (11) and (12)


In the formula,
After the volume point is obtained, these volume points are transmitted through the nonlinear system to obtain a more accurate posterior mean and covariance. Then, combine the state prediction and measurement update ideas in Kalman filter to estimate the system state.
The flow of ICKF algorithm is as follows:
I. Time update 1. Assuming that the state covariance matrix

2. Calculate the volume point

where
3. Calculate the volume point propagated through nonlinear equation of state

4. Calculate the state prediction value

5. Calculate the state error covariance

II. Measurement update 1.

2. Generate a new volume point

3. Measure the newly generated volume points by nonlinear equation

4. Calculate the measured predicted value

5. Calculate the measured auto-covariance


6. Calculate Kalman filter gain

7. Update state estimate

8. Update error covariance estimate of the state

The above two processes of time update and measurement update represent a standard CKF update process.
III. Iteration update
The difference between the implementation of ICKF algorithm and CKF algorithm lies in measurement update. ICKF algorithm introduces Gauss-Newton iterative algorithm into the update of mean and covariance of state. For solution of

ICKF algorithm flow chart.
ICKF’s measurement update is as follows
1. Define the cost function as

2. Solve the minimum value point of the cost function using Gauss-Newton nonlinear iterative method, and the iterative formula for

where j represents the j-th iteration,
In equation (28),


3. ICKF algorithm uses the newly generated volume point
Then


4. Set the iteration end condition:

where
Therefore, when the number of iterations is N, the state estimation and covariance at time k+1 are

ICKF-based PMSM vector control
PMSM control system is a nonlinear, strongly coupled, multivariable time-varying parameter system. The rotor position signal is a crucial parameter in the control process. To overcome the shortcomings caused by the mechanical position sensor, sensorless control is currently commonly adopted.
Since this article mainly studies ICKF algorithm-based PMSM sensorless control, vector control method is adopted. The core of PMSM vector control algorithm is coordinate transformation which includes static coordinate transformation (Clark transformation) and synchronous rotational coordinate transformation (Park transformation). The coordinate relationship between natural coordinate system ABC, stationary coordinate system α-β, and synchronous rotating coordinate system d-q is shown in Figure 2.

Relationship between the three coordinate systems.
The idea of motor vector control method is inspired by the fact that armature current and excitation current of DC motor are perpendicular to each other, without coupling and allowing independent control. By vector transformation, the stator three-phase current of AC motor is decomposed to realize the control of stator current magnitude and direction, thus achieving the purpose of decoupling direct axis and quadrature axis components, and making them into mutually perpendicular and independent torque current components and excitation components, so that AC motor has similar control performance as DC motor.20,21
Based on the previous ICKF, PMSM discrete mathematical model and PMSM vector control method, the ICKF-based PMSM sensorless vector control system established in Matlab/Simulink environment is shown in Figure 3. The system adopts a double closed-loop control scheme of speed and current, and both the speed loop and the current loop use a PI regulator. 22
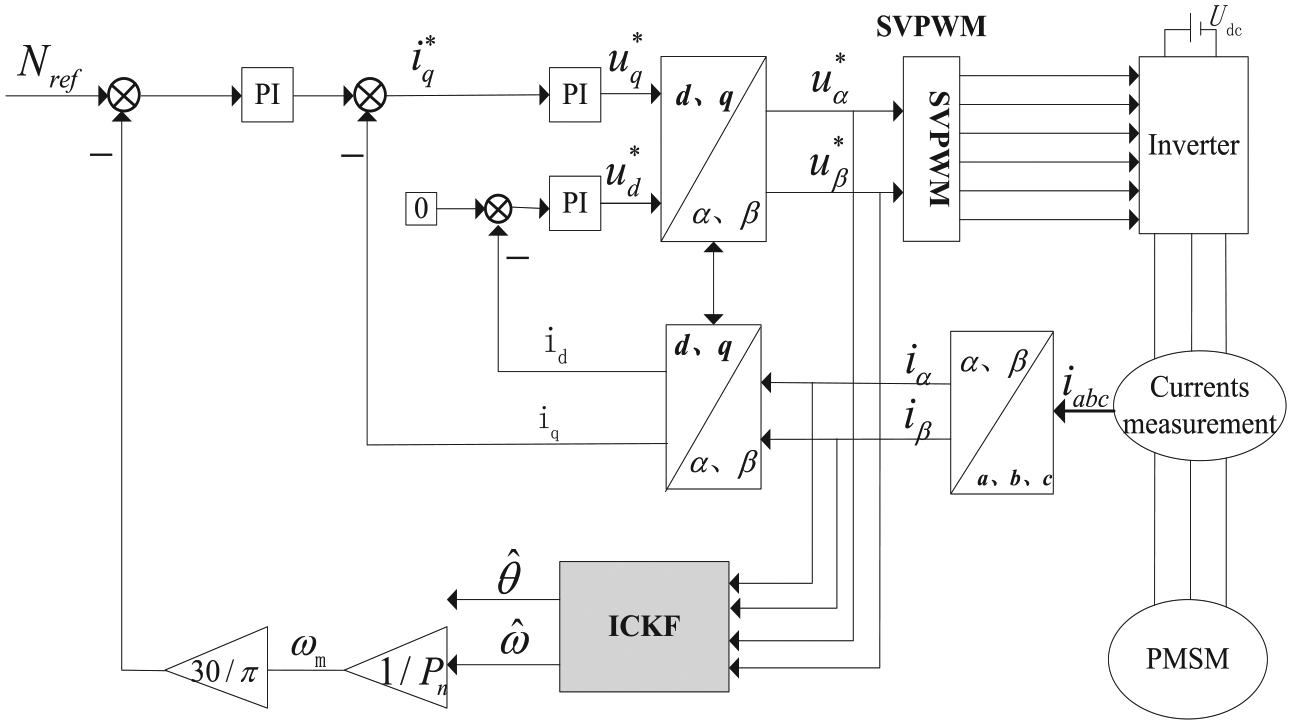
ICKF-based PMSM sensorless vector control block diagram.
According to Figure 3, the control system includes two core modules of two-level space vector modulation (SVPWM) and ICKF algorithm estimation, where SVPWM is derived from the principle that AC motor stator flux linkage tracks a circular trajectory. To make inverter output sine wave and control torque ripple to obtain better performance, this article adopts SVPWM technology to control PWM with the controller and PMSM as a whole. ICKF algorithm estimation module is established by S function of Matlab/Simulink. The input currents
Simulation analysis
According to the above analysis, PMSM sensorless vector control models based on CKF and ICKF are established in Matlab/Simulink environment, respectively, and simulation under two working conditions with given rotation speed and load is carried out.
Some PMSM parameters are shown in Table 1.
Some PMSM parameters.

After a lot of trials and errors, under the premise of ensuring convergence and dynamic tracking, the system process noise covariance matrix
1. Simulation conditions with no load at a given rotation speed of 1000 r/min.
Figures 4–7 show the PMSM simulation results with no load at a given rotation speed of 1000 r/min.

Comparison curve of estimated and actual values of PMSM rotation speed under no load.
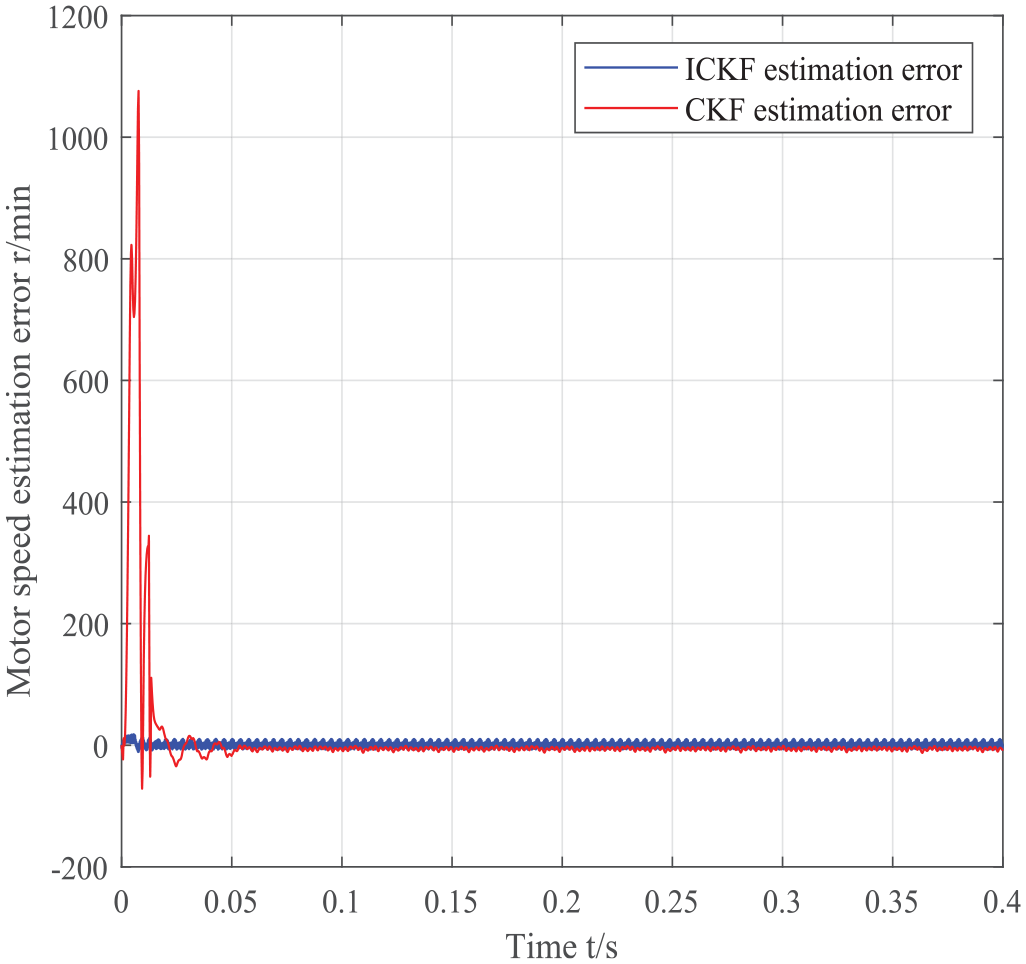
Comparison curve of PMSM speed estimation error under no load.

Comparison curve of estimated and actual values of PMSM rotor position under no load.

Comparison curve of PMSM rotor position estimation error under no load.
According to Figures 4 and 5, compared with CKF algorithm, ICKF algorithm can estimate PMSM rotation speed more accurately. When CKF algorithm is adopted, there exists big error value in rotation speed estimation when the motor speed rises, and the instantaneous maximum error can exceed 1000 r/min. However, ICKF algorithm has much smaller error value, with instantaneous maximum error less than 20 r/min, and stable and accurate estimation result is achieved in a shorter period of time. When the motor speed rises to a given rotation speed of 1000 r/min, the rotation speed estimation value only fluctuates slightly above and below the given rotation speed, tending to decrease gradually with time. It demonstrates that PMSM sensorless control using ICKF algorithm has better stability and convergence than CKF algorithm regardless the startup phase or the given speed operation phase. From the start of the PMSM to the stable operation phase, the ICKF algorithm has a higher accuracy for estimating the motor speed.
According to Figures 6 and 7, ICKF algorithm performs better in motor rotor position estimation. In the motor startup phase, ICKF algorithm and CKF algorithm show no obvious superiority in rotor position estimation, but after the motor runs stably, ICKF algorithm has much smaller estimation error and better convergence than CKF algorithm. Therefore, ICKF algorithm can estimate motor rotor position more accurately than CKF algorithm.
2. At t = 0.2 s, the load torque changes from 0
In order to verify the anti-interference ability of ICKF algorithm-based PMSM sensorless control system in case of sudden change in motor load torque, during the simulation, the load torque

Comparison curve between estimated and actual values of PMSM rotation speed under sudden load.

Comparison curve of PMSM rotation speed estimation error under sudden load.

Comparison of estimated and actual PMSM rotor position values under sudden load.
Comparison curve of PMSM rotor position estimation error under sudden load.
According to Figures 8–11, ICKF algorithm-based PMSM sensorless control system can better resist interference of sudden load change than CKF algorithm-based PMSM sensorless control system. When t = 0.2 s, after the load torque 5
The above simulation analysis shows that ICKF algorithm can estimate motor speed and rotor position more accurately by selecting appropriate controller parameters. Application of ICKF algorithm to PMSM sensorless control can meet the demands of more precise PMSM control. At the same time, it can be seen from the simulation that the result of the ICKF algorithm is very timely, and the response to the actual value changes quickly. The maximum delay of the estimated value and the actual value is about 0.02 s, which is more timely than the response of the CKF algorithm. Execution is more efficient.
Bench experiment
In order to further verify the actual control effect of ICKF algorithm-based PMSM sensorless control system, a hardware experimental platform as shown in Figure 12 was established. The experimental platform includes a host computer, a motor-driven experiment box, a PMSM and a loading motor for load application. The motor-driven experiment box includes a control circuit and a drive circuit, where the control circuit takes DSP chip TMS320F28335 produced by TI as the main control chip, which provides sinusoidal pulse width modulation (SVPWM) signal for three-phase controllable inverter circuit in the drive circuit. The inverter output is used to drive the controlled PMSM. The nameplate parameters of the experimental PMSM are consistent with the motor parameters set in previous simulation experiment, as shown in Table 1. The rotation speed and position signals obtained by CKF algorithm-based mechanical sensors in the comparative experiment are not involved in closed-loop control and are only used for comparison of experimental results.
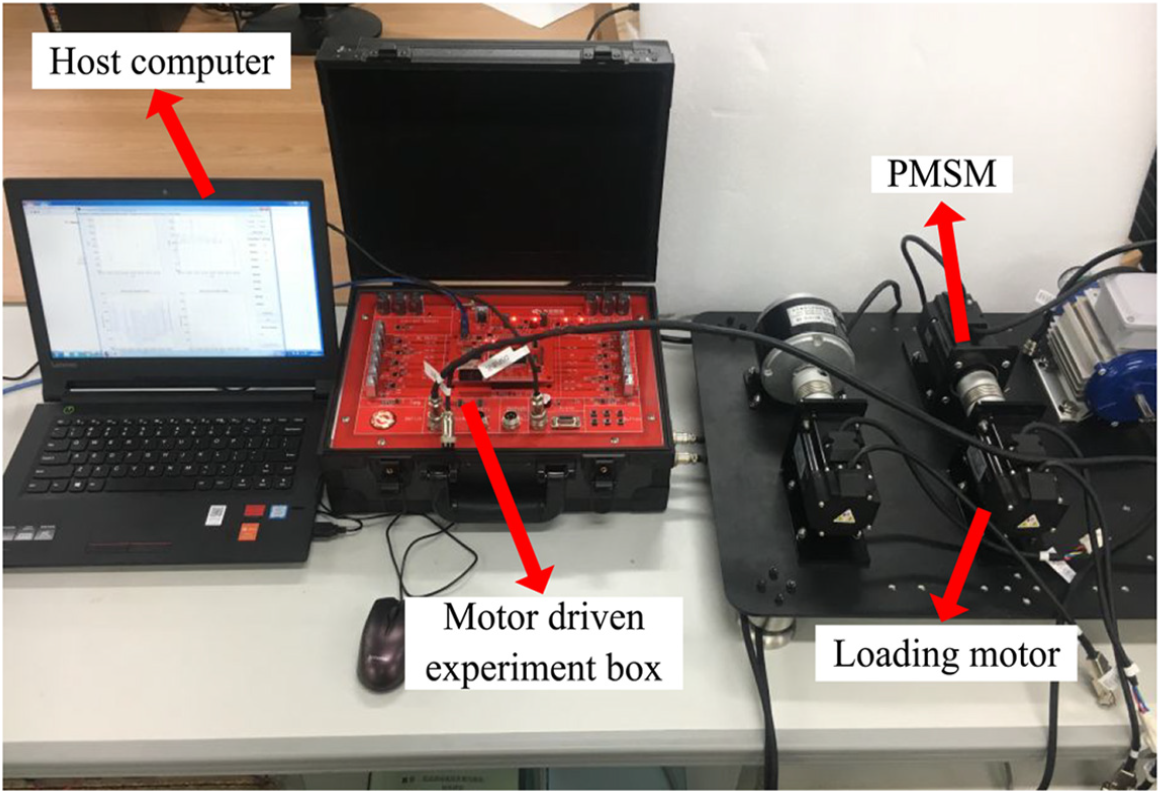
ICKF-based three-phase PMSM sensorless control experimental platform.
Run the CCS3.3 software in the host computer, connect the motor-driven experiment box with the host computer through the simulator, open and compile the three-phase PMSM sensorless vector control model based on CKF and ICKF algorithm in Matlab/Simulink environment, then C language code for DSP is automatically generated using cSPACE experimental device. After the code is generated, it is downloaded to the main processor TMS320F28335 DSP of the motor-driven experimental box through the emulator for online debugging, and PMSM movement is controlled via parameter adjustment. The host computer receives data using serial port tool, and the experimental result map is drawn using Matlab software.
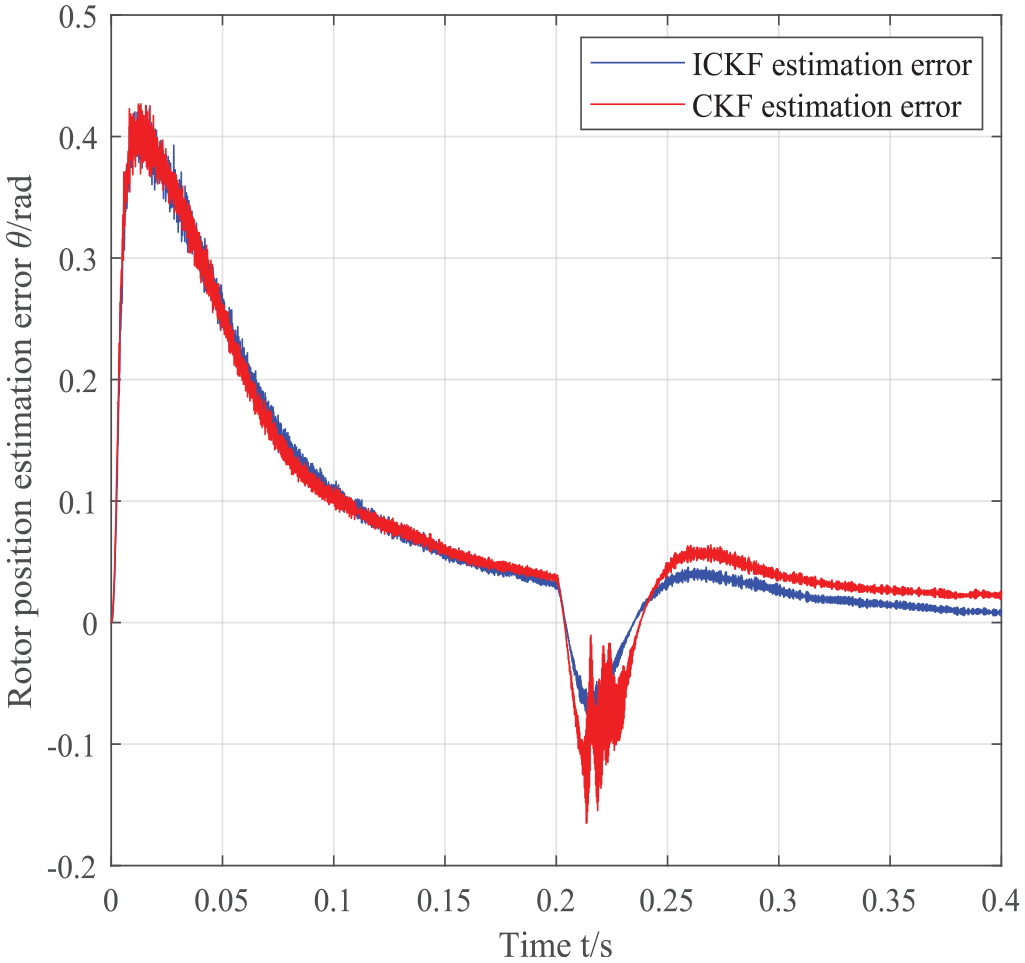
To verify the simulation results of the two working conditions set by simulation analysis, in the bench experiment, working condition was set as no load at rotation speed of 1000 r/min in the 0~0.2s time period, and 5
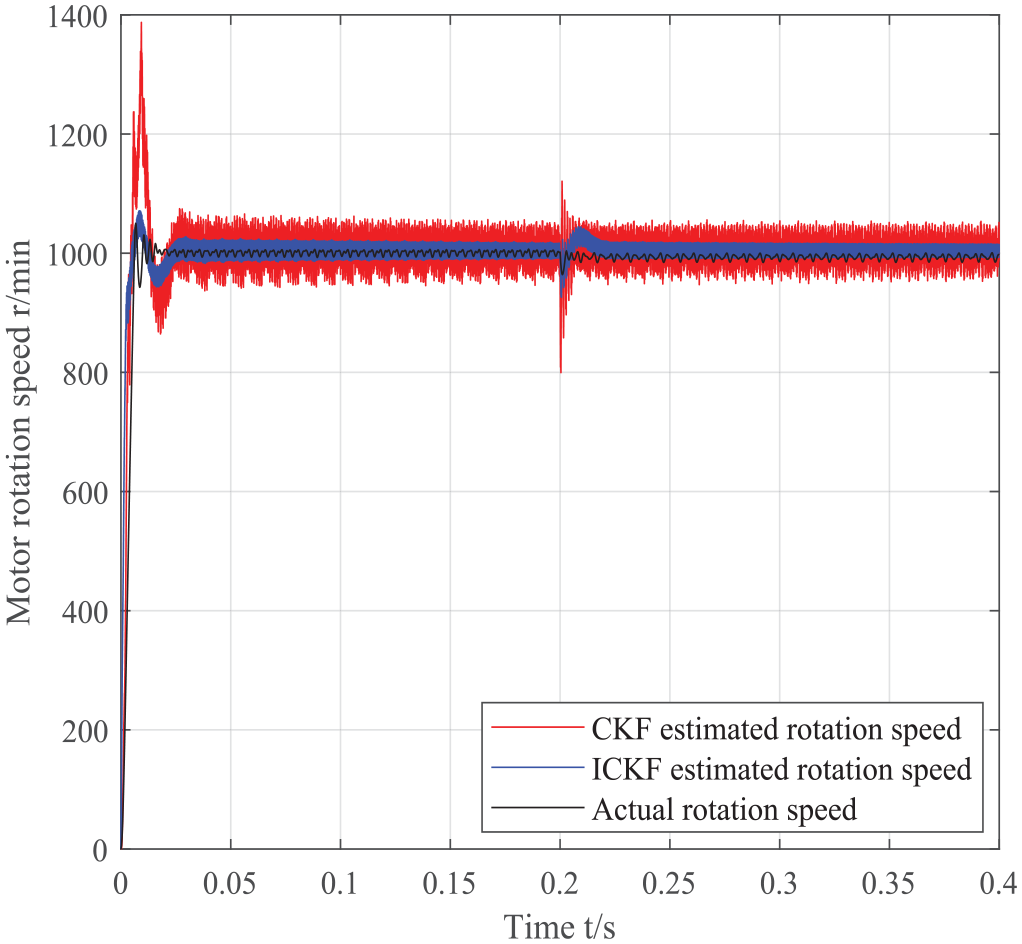
PMSM rotation speed estimation curve.

PMSM speed estimation error curve.

PMSM rotor position estimation curve.

PMSM rotor position estimation error curve.
According to Figures 13–16, ICKF algorithm can more accurately estimate motor speed and rotor position compared with CKF algorithm. It can be seen from Figures 13 and 14 that in the PMSM startup phase, the motor speed value estimated by ICKF algorithm is less fluctuated than that estimated by CKF, which is more close to the actual motor speed. After the motor operates smoothly, the rotational speed estimation is more accurate, with the estimated speed value slightly fluctuating around the actual value and with the error in gradual decrease. It can be seen from Figures 15 and 16 that ICKF algorithm can more accurately estimate motor rotor position than CKF algorithm, with smaller motor rotor position error and stronger resistance to sudden change in load, thus accurately reflecting motor rotor position. Through the bench experiment, it can be seen that the ICKF algorithm responds quickly to the change of the actual value. The delay of the estimated value and the actual value is controlled within 0.02 s. Compared with the CKF algorithm, the response is more timely and the execution efficiency is higher. The above experimental results verify the conclusions of simulation analysis and further demonstrate that the proposed ICKF-based PMSM rotor speed and position estimation algorithm has higher filtering accuracy and better anti-interference to load changes.
Conclusion
Based on the analysis of defects in traditional mechanical sensor-based PMSM control system and the existing sensorless control methods, this article proposes an ICKF-based PMSM sensorless control method. The discrete model of PMSM is established by Euler method. The ICKF-based PMSM sensorless vector control model is established according to the principle of ICKF algorithm, and the simulation analysis and bench experiment are done. Both analogue simulation and bench experiments have confirmed that, compared with CKF algorithm with good effect, ICKF algorithm can more accurately estimate PMSM rotation speed and rotor position, showing the advantages of small error, strong resistance to interference of sudden load change. It demonstrates that ICKF-based PMSM sensorless control has better control effect than CKF-based sensorless control as a good sensorless control method worthy of wider applications. For high temperature, high humidity, high vibration, and other harsh environments that are not suitable for sensor operation, if the PMSM is required to have high control precision, strong resistance to interference of sudden load change, and timely response, our research will be able to solve such problems better. In the future, based on the research of this article, we will make more research around further improving the PMSM sensorless control accuracy and simplifying the algorithm calculation process.
Footnotes
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) received financial support for the research, authorship, and/or publication of this article: The authors thank the financial supports of the National Natural Science Foundation of China (Grant No.51575001, No.51605003), Anhui University Scientific Research Platform Innovation Team Building Projects (2016–2018), and Young and Middle-Aged Top-Notch Talent Project of Anhui Polytechnic University (2016BJRC010).