
Abstract
The washout motion cueing algorithm (MCA) is a critical element in driving simulators, designed to faithfully reproduce precise motion cues while minimizing false cues during simulation processes, particularly deceptive translational and rotational cues. To enhance motion sensation accuracy and optimize the use of available workspace, model predictive control (MPC) has been employed to develop innovative motion cueing algorithms. While most MCAs have been tailored for the Steward motion platform, there has been a recent adoption of the motion platform based on KUKA Robocoaster as an economical option for driving simulators. However, leveraging the full potential of the KUKA Robocoaster requires trajectory conversion of the motion base. Thus, this research proposes a novel MCA specifically designed for the KUKA Robocoaster-based motion platform, utilizing large planar circular motion to simulate lateral movement for drivers. Nonetheless, circular motion introduces disruptive centrifugal forces, which can be mitigated through proper pitch-tilted angles. The novel MPC generates simulated motion that accurately follows the lateral specific force target and effectively maintains the roll angular velocity below its threshold value. Additionally, it compensates for disturbing centrifugal acceleration by implementing pitch rotational motion, ensuring the pitch angular velocity remains below its threshold. Simulation tasks conducted on the motion platform, focusing solely on lateral acceleration, demonstrate the successful elimination of false motion cues in both the roll/sway and pitch/surge channels. The proposed innovative MPC solution offers an original approach to motion cueing algorithms in KUKA Robocoaster-based driving simulators. It enables the exploitation of the KUKA Robocoaster platform's capabilities while delivering accurate and immersive motion cues to drivers during simulation experiences.
Introduction
Research in human motion perception and driver training programs often involves driving simulation with motion support. To recreate motion, a motion cueing algorithm (MCA) is utilized to provide drivers with an experience similar to that of driving in real life. However, due to the limited size of simulators, it is challenging to design an MCA that can replicate real vehicle experiences accurately.
In Slob's review of over a hundred driving systems worldwide, 1 it is evident that most of these systems use a 6 degree-of-freedom (DOF) hexapod. The hexapod, also known as the Gough-Stewart platform, 2 consists of a base with six actuators to move the simulator. However, its limited workspace for translational and rotational motion makes it unsuitable for simulating significant lateral motion.
To simulate larger lateral motion, several motion platforms have been designed with extended DOFs, such as the 8 DOF driving simulator at the University of Leeds, 3 or with specific structures, such as the 6 DOF Desdemona simulator in TNO. 4 In addition, some studies have utilized industrial robots, such as the 6 DOF KUKA Robocoaster, as motion platforms.5,6
The washout motion cueing algorithm (MCA) is a fundamental component in driving simulators, aimed at replicating accurate motion cues while minimizing false cues during simulation processes, specifically avoiding erroneous translational and rotational cues. Over the years, several MCAs have been developed, with the classical algorithm (washout filter) proposed by Conrad and Schmidt serving as a widely used origin for many MCAs.
7
Subsequent advancements have led to the introduction of various MCAs, incorporating optimization techniques such as adaptive washout filters, optimal MCA, and model predictive control (MPC).8–12 Model Predictive Control (MPC) stands out as a sophisticated and versatile control technique, well-suited for managing multivariable systems with constraints. Its predictive nature enables efficient handling of complex systems, providing optimal control actions for diverse applications. However, MPC implementation can be computationally demanding, necessitating careful parameter tuning for optimal performance, safety, and stability. To address this, researchers have focused on optimizing the MPC cost function weights, employing multiobjective genetic algorithms to minimize motion inputs, rates, displacements, and sensed errors, with valuable user feedback to assist in weight tuning.
13
It is worth noting that various MCAs have been adapted from the classical algorithm of Conrad and Schmidt to suit the specific kinematics of different motion platforms.
7
For example, specialized MCAs have been developed for motion platforms like the TNO driving simulator Desdemona, as well as lane MCAs for motion platforms with 3 Degrees of Freedom (DoF) and 8 DoF.14,15 Additionally, Giordano et al. have introduced a new motion cueing algorithm named cylindrical classical algorithm (CLG), designed with cylindrical coordinates specifically for the KUKA Robocoaster-based motion platform.
5
The fundamental concept underlying the CLG algorithm centers on capitalizing on the KUKA Robocoaster's substantial rotational motion capability to generate lateral acceleration tangential to the circular trajectory (represented as


Adapt the MCAs to the motion platform based on KUKA robocoaster 15 .
Where


In the comparative study of ten Motion Cueing Algorithm (MCA) implementations, 16 the Linear Model Predictive Control (MPC) algorithm is also applied to simulation tasks involving only lateral acceleration. However, due to the non-linear relationship between centrifugal acceleration (as depicted in equation 2) and yaw angular acceleration, constructing a linear model control system for MPC encompassing both longitudinal/pitch and lateral/roll channels becomes challenging. Consequently, the MPC modeling focuses solely on the lateral/roll channel, while the appropriateness of the longitudinal/pitch channel is evaluated using proposed criteria (Figure 1) to ensure the avoidance of false cues in this aspect.
To streamline the process of verifying the compatibility of simulated quantities in the motion platform without manual intervention, this paper introduces a novel Motion Cueing Algorithm based on Model Predictive Control (MPC), referred to as “novel MPC,” specifically designed for the KUKA Robocoaster-based motion platform. This algorithm effectively harnesses the capabilities of large planar circular motion to evoke sensations of lateral movement for drivers. Subsequently, two simulation tasks involving pure lateral acceleration are executed to validate the effectiveness of the novel MPC algorithm. Furthermore, the responses generated by the novel MPC are compared with those obtained from the classical algorithm proposed by Giordano et al. 5 to elucidate the advantages offered by the novel MPC algorithm in the context of motion platforms based on KUKA Robocoaster.
The novel motion cueing algorithm based on model predictive control
In the context of the driving simulation task involving pure lateral acceleration, the simulated specific force

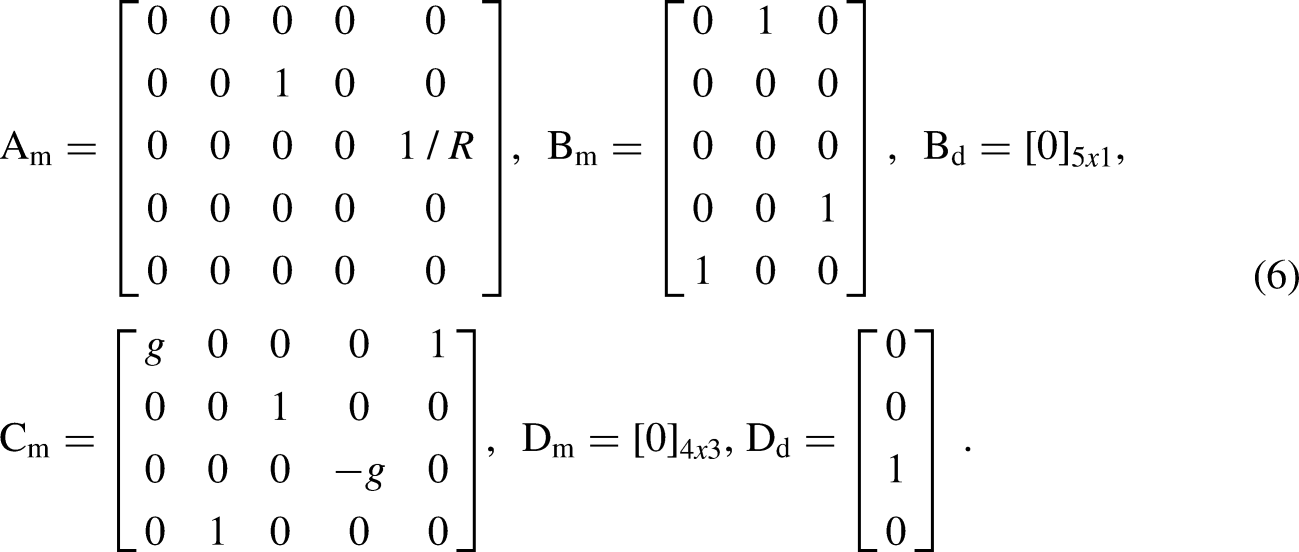
This research introduces a novel motion cueing algorithm based on model predictive control (MPC). The proposed algorithm involves building a model of tilt coordination, which incorporates compensating centrifugal acceleration. The plant model comprises three inputs, a measured input disturbance, four outputs, and five states. It is assumed that the number of outputs is less than or equal to the number of inputs (i.e. q ≤ m). The predictive control problem formulation takes into account plant noise and disturbance.

In this work, the input measured disturbance
And the system matrix of the model are
The control diagram of the novel MPC is shown in Figure 2, which is represented in Matlab Simulink. The manipulated variable

Control diagram of MCA based on MPC with measured input disturbance.
An augmented model with input-integrated




Additionally, other constraint conditions for input and output variables (as displayed in Table 1) have been carefully selected to restrict abrupt changes in simulated acceleration and ensure the maximum simulated specific force remains within acceptable bounds during the simulation task.
Constrain of the input and output variables.

To attain high-fidelity simulated quantities, the weighting matrices are meticulously defined and fine-tuned for optimal performance. These matrices are instrumental in acquiring the desired results, denoted as
Simulation tasks and comparison the novel MPC with the classical MCA
The novel Model Predictive Control (MPC) algorithm was tested in two simulation tasks, one involving a virtual vehicle running along a planar S-curve rail with a constant velocity of 2.5 m/s and the other simulating a car running around a corner using the CARLA 0.9.12 Releases simulator. In the first task as shown in Figure 3, the simulated lateral specific force (the green dash line) tracked the target specific force (the black solid line) while the disturbing longitudinal specific force fx due to the centrifugal acceleration ac (the dash magnetic line) was reduced to zero. The centrifugal acceleration was compensated by the gravity force (the cyan solid line) due to the suitable tilt pitch angle

Simulated specific force and the disturbed acceleration.
The novel MPC algorithm generates all the angular velocity in both roll and pitch channels under the threshold value of 0.1 rad/s9 of the human vestibular system, as seen in Figure 4. This means that the rotation of the motion platform has no effect on drivers.
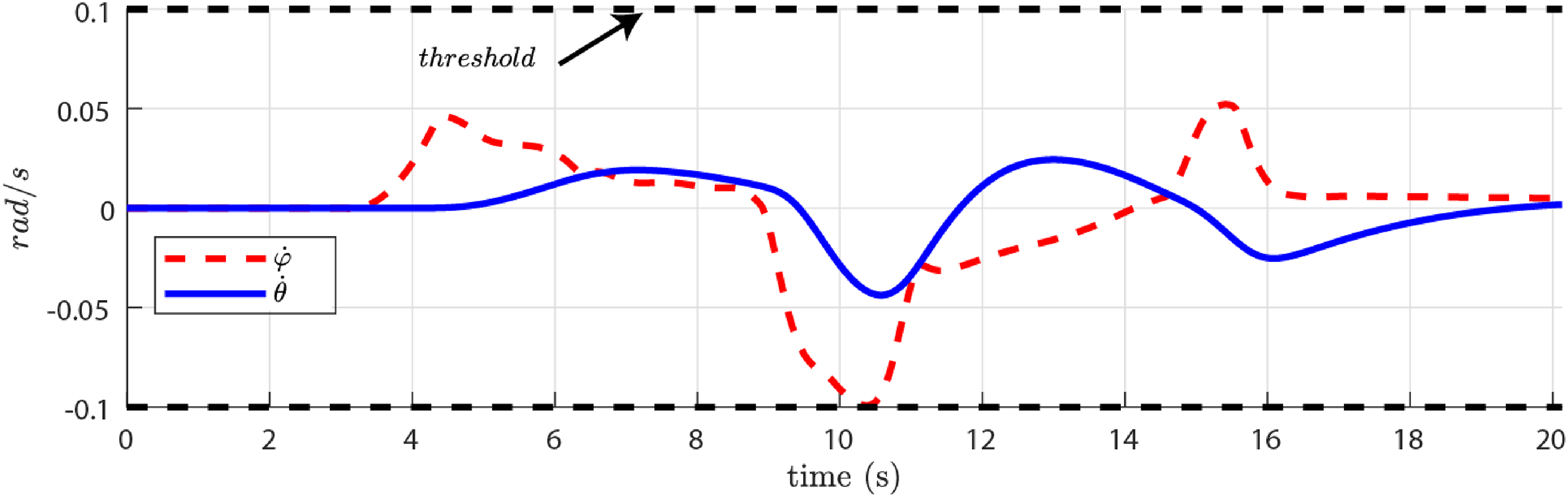
Simulated angular velocity of roll and pitch channels.
The novel MPC algorithm also employs yaw rotational motion instead of lateral linear motion for generating the simulated lateral acceleration. The algorithm implements the washout effect by pulling all the angles to zero at the end of the simulation, as seen in Figure 5, where the simulated tilted angles of roll, pitch, and yaw channels are shown.

Simulated tilted angles of roll, pitch, and yaw channels.
In the second simulation task, we utilize the pure lateral acceleration of a car navigating a corner as the input signal for the novel MPC. The simulation is conducted using CARLA, an open-source simulator renowned for its application in research related to autonomous driving.
17
The task aimed to demonstrate the responses of the algorithm to high-frequency input signals. Figure 6 shows that the simulated lateral specific forces

Simulated specific force and the disturbed acceleration.
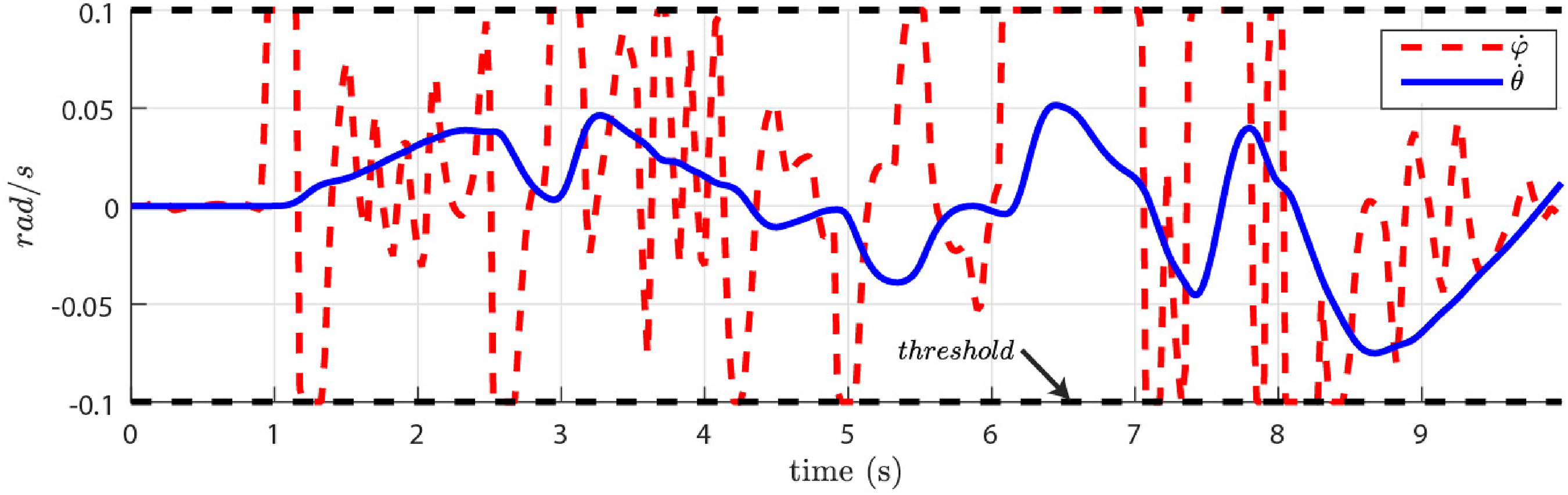
Simulated angular velocity of roll and pitch channels.
Figure 7 also shows that the two angular velocities of the motion platform are still under the threshold value. However, the novel MPC algorithm hardly restricts the roll angular velocity (the dash red line) in the threshold, resulting in the simulated lateral specific force having missing cues within the time range of 6–8 (s) with a large amplitude of the target-specific force.
The simulated quantities of the novel MPC algorithm were compared to those of the classical Cylindrical coordinate (CLG) algorithm for the first simulation task. The novel MPC algorithm nearly reproduces the target lateral specific force, while the CLG algorithm creates large missing cues in the time range of 11–12(s), as seen in Figure 8. Both algorithms generate the amplitudes of longitudinal specific forces and pitch angular velocity under the threshold of 17 (m/s2) and of 0.1 (rad/s), respectively, as seen in Figure 9. However, the novel MPC algorithm generates the roll and pitch angular velocity without the hard restriction seen in the CLG algorithm, as seen in Figure 10 (a) and (b), respectively. Therefore, the novel MPC algorithm provides better motion perception than the CL algorithm for the first simulation task.
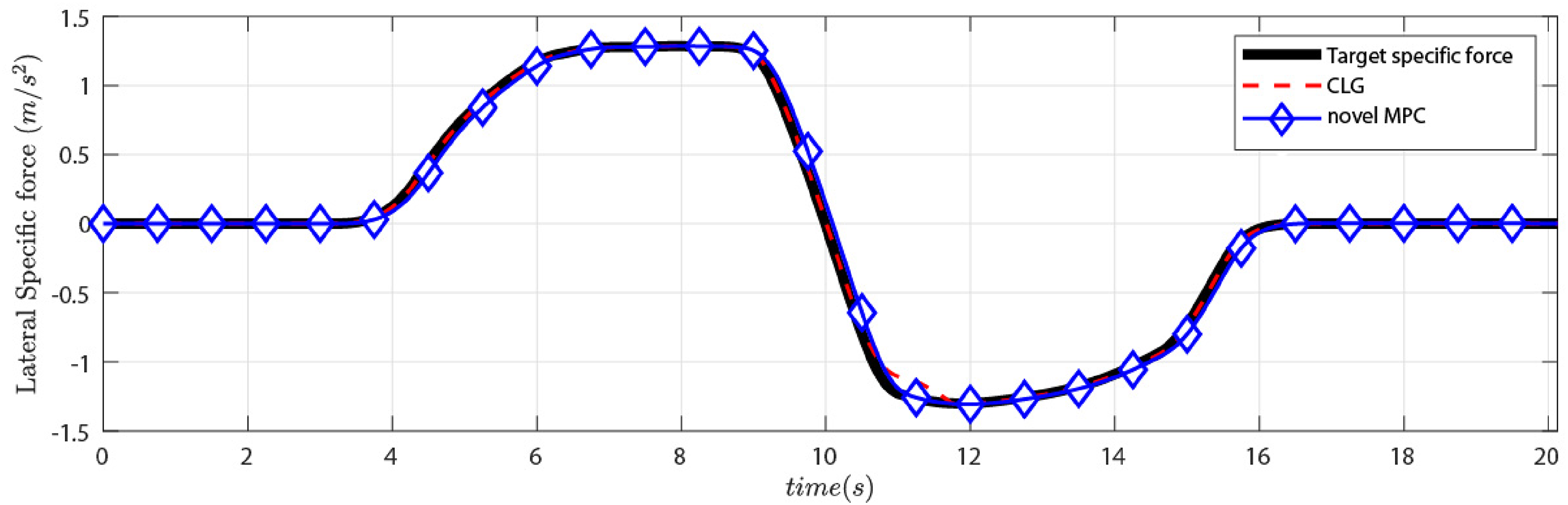
The lateral specific forces of the novel MPC and CLG algorithm.

The longitudinal specific forces of the novel MPC and CLG algorithm.

The roll (a) and pitch (b) anglular velocity of the novel MPC and CLG algorithm.
In conclusion, the novel MPC algorithm presents significant advantages over the classical MCA approach. It excels in reproducing the target lateral specific force, generating roll angular velocity without imposing hard restrictions, and providing better motion perception. This algorithm's simulation tasks showed remarkable responses to both low- and high-frequency input signals, and it was capable of compensating for disturbing longitudinal specific force and centrifugal acceleration. The algorithm generates all angular velocity in both the roll and pitch channels below the human vestibular system's threshold value, ensuring that the motion platform's rotation has no effect on drivers.
The novel MPC algorithm shows significant promise and potential for future applications in virtual and real driving scenarios. By providing better motion perception, it could help enhance the driving experience for users, making it feel more realistic and immersive. In addition, the algorithm's ability to generate all angular velocity in both the roll and pitch channels below the human vestibular system's threshold value presents a clear advantage in terms of user comfort, reducing the risk of disorientation and motion sickness.
Further research into the novel MPC algorithm's capabilities, limitations, and potential applications could lead to even more significant developments in the field of virtual and real driving scenarios. As the technology and our understanding of the human sensory system continue to advance, we can expect to see even more innovative solutions emerge, improving the driving experience for users across the globe.
Conclusion
The driving simulator with the motion platform based on the KUKA robocoaster is advantageous in reproducing lateral acceleration due to the robot's large rotation capability. However, to avoid false cues, compensating for the centrifugal acceleration caused by the rotational motion is crucial by maintaining appropriate pitch angles to ensure that the longitudinal specific force and pitch rotation angle remain below the threshold of human perception. This study proposes a novel MPC algorithm based on model predictive control, which considers the centrifugal acceleration as a disturbing quantity in the output. The algorithm aims to reproduce the lateral specific force according to the target lateral specific force, limit roll and pitch angular velocity to the sensory threshold range of 0.1 rad/s, and reduce longitudinal specific force to below the sensory threshold of 0.17 (m/s2). The results of the simulations demonstrate that the MPC algorithm satisfies the control requirements for the first simulation case of a virtual vehicle moving along an S-shaped trajectory with a fixed speed. For the second simulation task with the lateral acceleration of a virtual car from the CARLA, the MPC algorithm successfully follows parts of the target specific force with rapid changes and appropriate amplitudes, without generating false cues of rotation and linear specific forces. However, due to the limitations of angular velocity, the MPC algorithm cannot follow the higher amplitude part. Comparing the MPC with CLG algorithms for the first simulation, the MPC algorithm generates better simulated specific forces. In conclusion, the proposed MPC algorithm is well-suited for the motion platform based on KUKA Robocoaster, effectively utilizing the robot's rotation to simulate lateral acceleration while ensuring motion cue errors remain below the sensing threshold. Moreover, the MPC algorithm streamlines the motion calculation process in the simulation system, leading to reduced time for parameter adjustments compared to other MCA algorithms. However, it is important to note that the novel MPC is currently more suitable for offline implementation due to the time-consuming computation of response quantities involving large horizontal prediction and control. Future research directions include the optimization of horizontal prediction and control, as well as weighting parameters, using auto-tuning methods. Additionally, exploring the integration of the plan model with measured disturbance input in explicit MPC will be investigated for potential online implementation in the motion platform based on KUKA Robocoaster. Furthermore, the novel MPC algorithm will be applied to specific driving simulation tasks to compare its simulated quantities against those generated by other MCAs. These investigations will contribute to a deeper understanding of the novel MPC's capabilities and potential for further advancements in motion cueing algorithms.
Footnotes
Acknowledgments
This work was supported by Hanoi University of Science and Technology (HUST) under grant number T2022-PC-015
Declaration of conflicting interests
The authors declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The authors disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This work was supported by the Hanoi University of Science and Technology (HUST), (grant number T2022-PC-015).
Author biographies
Duc-An Pham is an associate professor in the School of Mechanical Engineering, Hanoi University of Science and Technology, Vietnam. He got a bachelor’s degree in the Talented Engineering Programme of Mechatronics and a master’s degree in Mechanics Engineering at Hanoi University of Science and Technology, Vietnam. Then he graduated PhD degree in Mechatronics and Robotics at Duisburg-Essen University, Germany. His research interests are machining process, CAD/CAM/CAE, robotics, motion cueing algorithm, driving simulators and auto-tuning method. Currently, he serves as a vice-dean of Mechatronics Faculty.
Trung Nghia Pham graduated from the School of Mechanical Engineering, Hanoi University of Science and Technology, Vietnam. He got a bachelor’s degree in the Talented Engineering Programme of Mechatronics and is working to achieve master’s degree in Mechatronic at Hanoi University of Science and Technology, Vietnam. His main research interests are autonomous mobile robot, unmanned aerial vehicle and vehicle driving simulator.
Duc-Toan Nguyen is professor in the School of Mechanical Engineering, Hanoi University of Science and Technology (HUST), Vietnam. He was educated at the Hanoi University of Technology for his Engineer and master's degree in Mechanical Engineering and graduated PhD at the Kyungpook National University. Then, he pursued his professional career at the leading university of Vietnam (HUST), where he undertook research related to the plasticity of material, machining processes, CAD/CAM/CAE, and robotics. Currently, he serves as the vice-president of the Vietnam Association of Science Editing (VASE).