
Abstract
To deal with the sideslip angle caused by the current disturbances or transverse motion for path following of under-actuated ships, a nonlinear observer established by an exponential function is introduced in the backstepping approach which converts the path following into heading control. Then, the model predictive control (MPC) method is used as a heading controller, addressing the rudder optimization. A linear extended state observer technology was exploited to estimate yaw rate, external disturbances, and internal uncertainties, which could avoid measuring the high-order state used in the MPC controller and promote the accuracy of the MPC internal model. Moreover, an inverse tangent function is applied to develop a new method for switching the reference heading angle to reduce rudder amplitude when the ship is choosing the next waypoint. Finally, the validity and reliability of the design method were verified through comparative computer simulation experiments.
Keywords
Introduction
In recent years, the path-following control of underactuated ships has become an important research topic in nonholonomic systems. 1 Fossen applied the Line of Sight (LOS) guidance to a straight linear path following, where the algorithm was converted to heading control. 2 Then, the integral LOS was presented in Lekkas and Fossen 3 and Chen et al. 4 to offset the sideslip angle due to current disturbances or transverse motion. To avoid the sideslip angle, the adaptive method was proposed in Huang and Fan. 5 However, the above algorithms addressed the small or slow sideslip angle only, the linear extended state observer (LESO) was presented in Liu et al. 6 and Wang et al. 7 for estimating the sideslip angle. However, external disturbances, model uncertainties and unknown parameters should also be considered. An iterative sliding mode control with reinforced learning was proposed in Shen and Dai 8 and Shen et al. 9 where the environmental disturbances and internal uncertainties can be ignored. Then, the neuron adaptive iterative sliding mode was presented in Shen and Jing 10 to address the uncertainty of parameters and unknown disturbances. In Wang et al., 11 a multiobjective genetic algorithm was used to address the restrictions caused by the model perturbation and external interferences. Robust and adaptive control was applied in Zwierzewicz 12 and Padideh et al. 13 to offset the modeling inaccuracies and external interferences. The adaptive technique was also applied in Vo et al. 14 and Hu et al. 15 to address the nonlinear hydrodynamic term or external disturbances. Then, radial basis function (RBF) neural networks were applied in Shen et al. 16 and Wan et al. 17 to offset model uncertainties. In Zeng et al., 18 a simplified RBF neural network was proposed. In Yu et al. 19 and Zhang et al.,20 a minimum learning parameter (MLP) neural network approach was used to decrease the calculation burden. The MLP algorithm was also applied in Mu et al. 21 and Shen and Wang, 22 which could tackle the uncertainty of dynamics and external interferences. Most RBF or MLP weights or adaptive laws were updated by combining with the tracking errors, but when the tracking error changes rapidly, the accuracy of the tracking is reduced. In Ding et al., 23 an improved observer was proposed to estimate unknown interferences. A nonlinear observer was proposed in Zheng and Feroskhan 24 where the estimation of interferences is more accurate. In addition, an active disturbance rejection control (ADRC) method, presented by Han based on proportional integral derivative control, Han 25 has been successfully used in many control areas where the system has unknown parts. In Huang and Fan,5 the ADRC technology was proposed with LOS law for the path following, and the key of ADRC, namely extended state observer (ESO), was used to estimate the disturbances. Then, the ADRC was extended by Gao 26 to linear ADRC whose key is LESO, due to the difficulty of adjusting the ESO parameters. In Li et al., 27 the LESO was applied to solve the uncertainty of dynamics and external interferences. The LESO was also used in Li et al., 28 it promotes robustness to wave to address the control input constraints, the auxiliary system was used in Fan et al. 29 and Wang et al. 30 In Liu et al., 31 the constraints could be handled by the bounded nonlinear function in the iterative sliding mode controller. In Nie and Lin, 32 a novel simple attitude-tracking compensator was introduced to solve the input saturation. There is a standard optimization method for complex constrained systems, 33 namely model predictive control (MPC), which can directly incorporate dynamic constraints to address the control input constraints easily. 34 In Yao et al., 35 the MPC method was used to obtain an optimal expected angular velocity satisfying the constraint. The linear MPC was used in Hu et al., 36 where input range and incremental constraints were considered. However, linear MPC may introduce inaccuracy when the external disturbances are large. In Liu et al., 37 the MPC algorithm with improved least squares support vector machines were presented for promoting the controller robustness under disturbances or uncertainties. Both linear MPC and nonlinear MPC were proposed in Zheng et al. 38 to address input constraints. However, the inaccuracy of the internal model and the problem of measuring high-order state always increase the difficulties of using the MPC algorithm.
Most of the existing observers are unable to resolve external disturbances, model uncertainties and unknown parameters. Considering abovementioned research, this paper combines the backstepping method with the MPC algorithm for path following. Model predictive control has the advantages of good control and robustness, which can effectively overcome process uncertainty, nonlinearity and parallelism, and can easily handle various constraints in the process controlled and manipulated variables. Motivated by Wang et al., 7 the nonlinear observer is designed, via the exponential function, for estimating the sideslip angle. The MPC is exploited as the heading controller, addressing the rudder constraints and optimization. Furthermore, the LESO is used to estimate the yaw rate, external interferences as well as model uncertainties, which could avoid measuring high order state and promote the accuracy of the internal model. Moreover, an inverse tangent function is applied to construct a switching reference heading angle, such that the rudder amplitude can be reduced when the ship is selecting the next waypoint.
The main contents of the article are as follows:
In part 2, the control objective is presented. In part 3, a controller for ship path following based on backstepping and MPC method was designed. In part 4, compared simulation analyses were carried out. In part 5, the concluding remarks are given.
Control objective
The ship motion parameters are shown in Figure 1.

The ship motion parameters.
where u denotes surge velocity, v denotes sway velocity, r denotes yaw rate, ψ is heading angle, U = (u2 + v2)1/2 is ground velocity, and β = arctan(v/u) denotes sideslip angle, which is difficult to calculate because v cannot be measured directly. Then, the ship path-following model is:


The ship cross-track error.
where yd denotes a reference path desired by the waypoint, ye denotes cross-track error, θ denotes straight line angle, and R denotes turning range radius. Then, the control objective is to design δ that is ship following the reference path, namely satisfy ye = 0.
Path-following controller
In the path-following control system, the article uses the backstepping method to control the reference heading angle and the MPC method to control ship's heading. Furthermore, the LESO is used to estimate the yaw rate, external interferences as well as model uncertainties, which could avoid measuring high order state and promote the accuracy of the internal model. Then, the control design is shown in Figure 3.

The control design diagram.
The backstepping algorithm for reference heading
In this section, the backstepping algorithm was used to design reference heading angle. It allows complex nonlinear systems to be decomposed into subsystems of no more than the order of the system, and then partial Lyapunov functions and intermediate virtual control quantities are designed for each subsystem until the entire control law is completed. The backstepping method is applied to produce the initial reference heading angle ψd1 and a nonlinear observer was designed to estimate sideslip angle β. This design philosophy ensures a stable convergence of the system and ensures stable tracking of the heading, reducing system chatter. According to Figure 2, we have



Choosing the Lyapunov function V1 = (1/2)ye2 and then,

Thus, the designed ψd1 could guarantee ye is bounded and converges to 0. The next waypoints P
k
+ 2 should be selected when ship position P(x, y) satisfies




We select the positive coefficients η and choose the Lyapunov function

Considering the characteristic of h and choosing the suitable parameter ky2 < 1/η, z2 and (ŷ−y) have the same sign. If (ŷ−y) > 0 and z2 > 0, then

Model predictive control method for heading controller
For the MPC's path-following problem, a suitable predictive control method not only helps to ensure the stability of the control system but also reduces the amount of computation and increases the calculation speed. An improved MPC method is proposed to design a heading controller. Considering the large control input may be designed when the reference value changes suddenly and greatly, a new switching method is proposed there. We introduce an inverse tangent function to design the switching reference heading angle






Linear extended state observer algorithm for evaluating total unknowns and yaw rate
The traditional LESO technique has more solutions for external disturbances and model uncertainties, but less for control input constraints and system optimization. In this paper, a path-following predictive control algorithm combined with LESO is proposed to deal with the rudder angle constraint and optimization problem. The traditional MPC with a single structure is improved by using the LESO technique to approximate the uncertainties and external disturbances and to compensate for the prediction model with feedback. In addition, the longitudinal and lateral velocities and the yaw rate are estimated using a nonlinear observer and LESO respectively, avoiding the problem that the required system state values for the controller are not easily measured.
In path-following control, it is vital to deal with external disturbances and to calculate the yaw rate. In this section, the LESO is used to evaluate total unknowns f and yaw rate r. Considering equation (1), the improved LESO can be written as follows:

Firstly, the observer estimation errors are obtained

Then, if l2 = 1/χ, then w1 = 0. According to formula (19), we have

Simulation analysis
The problem of achieving a ship's path following is a very complex process. It requires the sophisticated cooperation of several devices such as rudders and propellers. In the simulation experiments, the parameters must not only be designed to match the actual conditions of the ship but also to ensure the stability of the control system.
Simulation model
The ship mathematical model group (MMG) model is applied in the simulation ship motion model finally, expressed as Zhang et al.40,41:
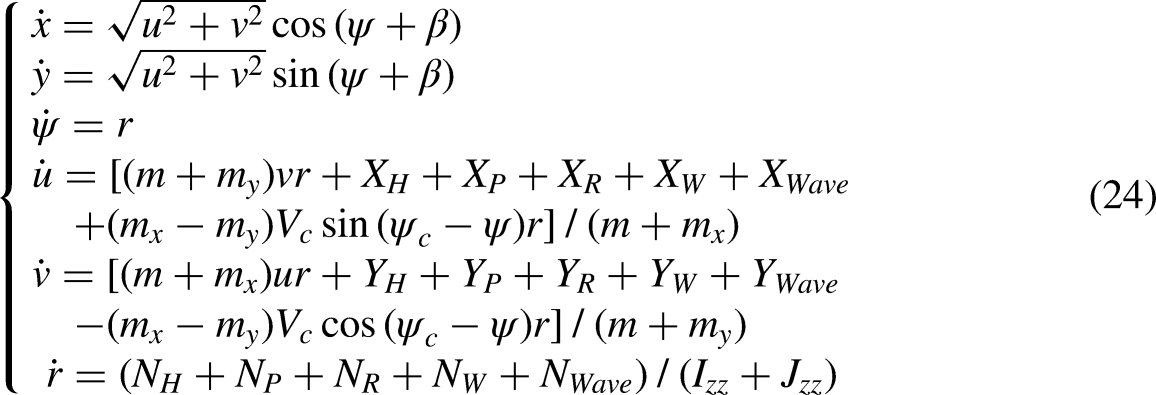

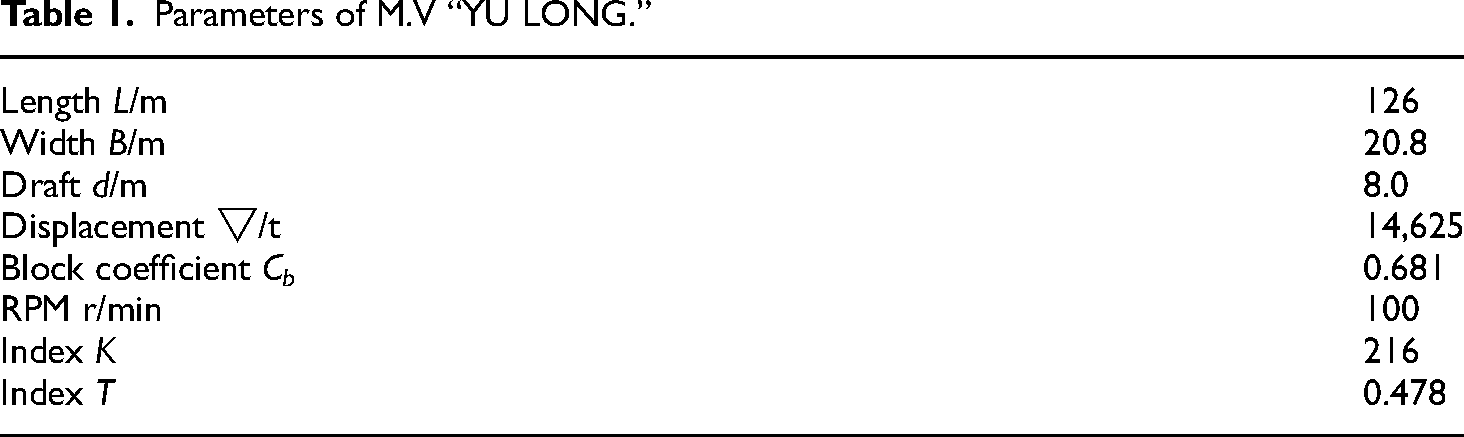
The M.V “YULONG” is used to prove the validity of the proposed method in the simulation. The main parameters of the ship are shown in Table 1.
Parameters of M.V “YU LONG.”
The dynamics are given by MMG model (3), and the wind (moment) XW, YW and NW are given by Wang et al.
42
:
The waves (moments) XWave, YWave and NWave are given by Qian et al.
43
:
Simulation results
Case 1. To illustrate the ability of avoiding the great rudder amplitude when ship moving at the turning waypoint by introducing the proposed switching reference heading method, we choose three reference heading angles for the compared simulation, namely: (1) ψd1 without switching, (2) ψds1 with the switching (kψ = 0.7), (3) ψds2 with the switching (kψ = 0.5). The others control parameters: k1 = π/4, k2 = 0.003, ky1 = 0.11, ky2 = 0.009, kh = 20, ψmax = 1.5°, Tc = 1.5 s, Np = 24, Nc = 1, l1 = 1.2, l2 = 0.48, l3 = 0.064. The desired waypoint: P1(0, 0), P2(4000, 0), P3(7000, 3000), P4(8000, 7000), and P5(9500, 7000). The initial states: u = 7.0 m/s, v = 0, r = 0, ψ = 0, (x0, y0) = (0, 100 m). The values of external disturbances are shown in Table 2:
The values of external disturbances.

The simulation results based on the different reference heading angles are shown in Figures 4 to 8. Figures 4 to 6 represent the path, expected reference heading, actual heading, rudder angle and rate based on three different reference heading angles (without switching ψd1, switching ψds1 and ψds2). In Figure 4, we can see that, all y1, ys1, and ys2 can follow the desired path yd successfully under the environmental disturbances, and ys2 could follow the next path smoothly when ship is moving at the turning point. Figure 5 shows that, the jumps of ψds1 and ψds2 (based on switching) are less than ψd1 (without switching) at the turning point, and the actual heading ψs1 and ψs2 are more smoother. In Figure 6, δ1, δs1, and δs2 are variable due to the time-varying interferences such as wave, wind and current. However, δs1 and δs2 are more smaller and smoother than δ1, and δs2 could avoid the large rudder angle effectively when ship is selecting the next waypoint. All the rudder rates Δδ1, Δδs1, and Δδs2 are less than 6°/s, namely can be constrained within the saturation. Figure 7 illustrates the validity of the presented sideslip observer, and the sideslip angle β is approximated successfully. Figure 8 shows that the yaw rate r and total unknowns f could be estimated accurately by the LESO.

The path following based on different reference headings.
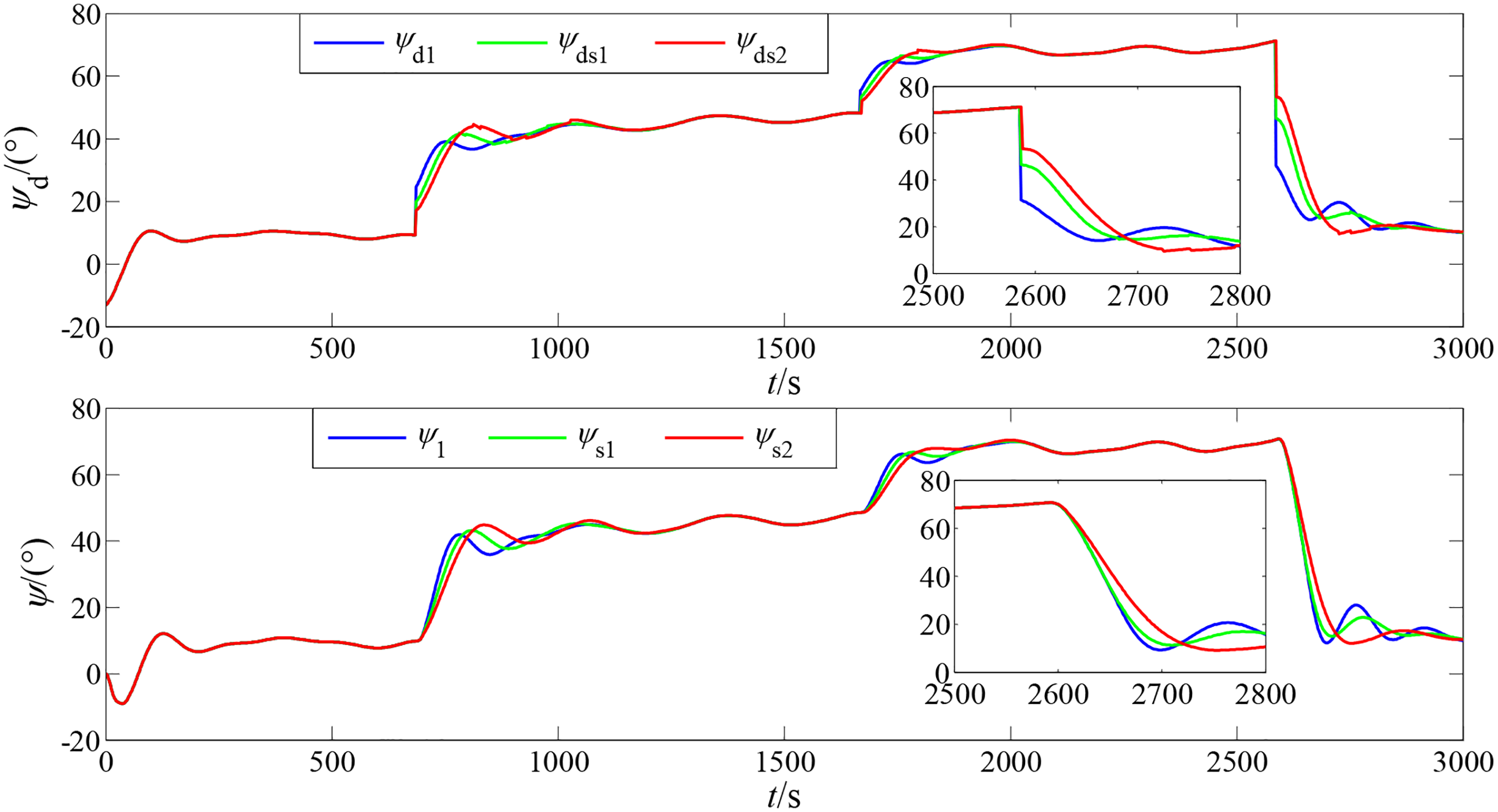
The different reference headings and actual headings.

The rudder angle and rate.

The sideslip angle.

The yaw rate and total unknowns.
Case 2. To illustrate the effectiveness of addressing the rudder constraints and optimization via the proposed MPC algorithm, we compare the designed MPC controller with the PD controller proposed in Li et al.
27
and the sliding mode method (SMC: the sliding surface is
In Figure 9, yMPC, yPD, and ySMC can achieve the path following in the presence of the time-varying interferences, demonstrating the effectiveness of addressing the internal uncertain and external disturbances by three controllers. Figure 10 shows that the oscillations of δMPC are less than δSMC, and the performance of δMPC is much better than δPD.

The path following based on different controllers.
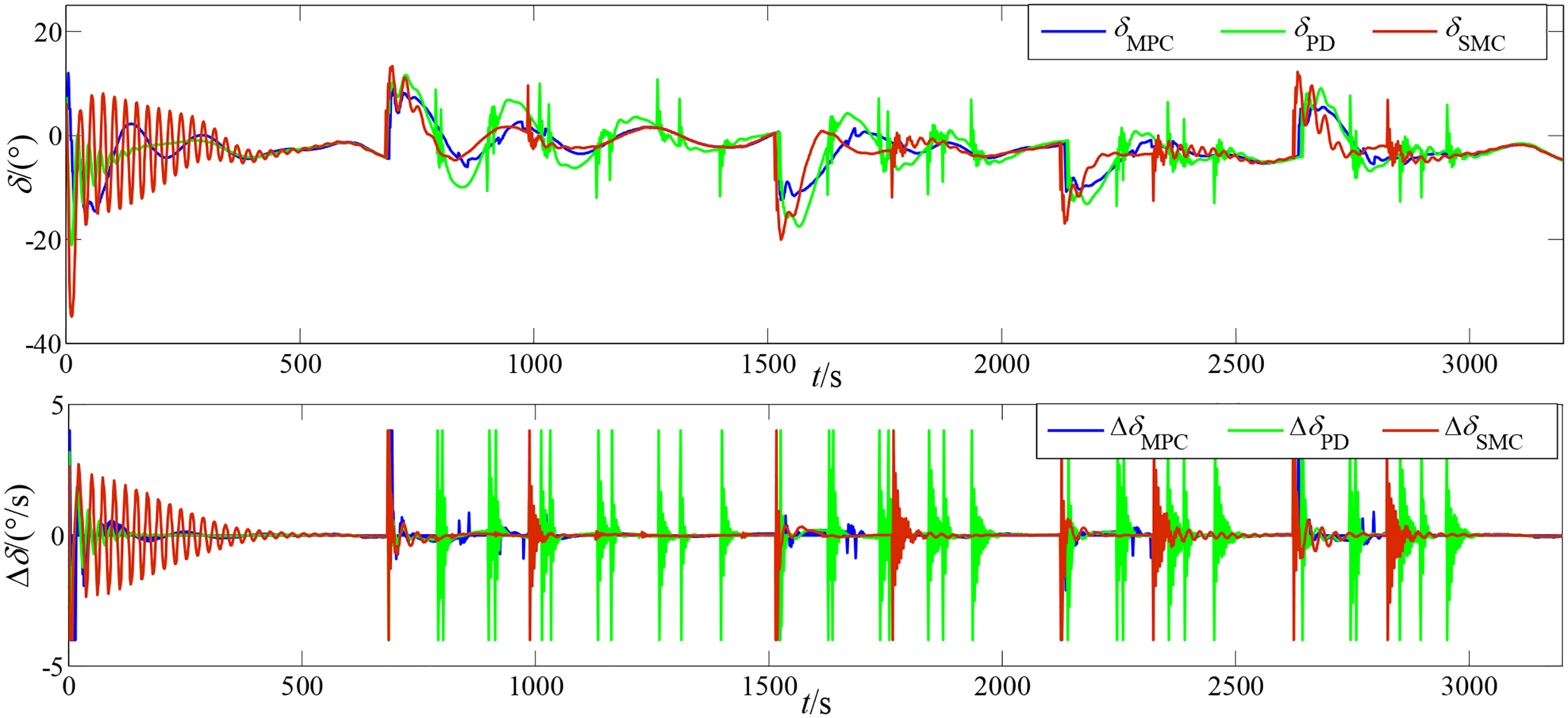
The rudder angle and rate based on different controllers.
In general, the heading angle and rudder angle are constantly fluctuating to counteract the effects of time-varying disturbances. The rudder angle varies particularly sharply due to first-order high-frequency wave disturbances. The oscillations that occur in the control signals in the article are affected by the accuracy of the model predictions, but the main cause is the influence of external disturbances, and such oscillations are consistent with nautical reality.
Case 3. To prove the availability of handling the sideslip angle based on the designed nonlinear observer, we compare the built nonlinear observer with the linear observer used in Wang et al.
7
The desired waypoint: P1(0, 0), P2(3500, 0), P3(6000, 2000), and P4(8000, 2000). The initial states: u = 7.0 m/s, v = 0, r = 0, ψ = 0 (x0, y0) = (0, 200 m). Other parameters are the same as Case 1. To compare the performance of the observer explicitly, we select a new current set ψc with a jump point. The new set is given

The path following based on different observers.

The sideslip angle and estimation errors.
In conclusion, the above simulation results show that the set side slip angle control algorithm can make the ship return to the set path stably and smoothly. The control algorithm designed in this paper can effectively solve the problem of model uncertainty and external disturbances. To achieve an accurate following of the path, the ship needs to keep steering in the presence of external disturbances, resulting in a certain amplitude of oscillation in both heading and rudder angles. However, the MPC oscillation amplitude is smaller and shorter at the beginning, and the variation is smoother, which shows the MPC algorithm's ability to handle rudder angle constraints and optimization.
Conclusions
This paper combines the backstepping algorithm with MPC methodology for path following of ships with the rudder constraints and optimization. A nonlinear observer is designed to compensate the sideslip angle, and the LESO technology is used to estimate the yaw rate and total unknowns. Furthermore, a new switching method is presented to reduce the rudder amplitude at the turning point. Finally, the compared simulation shows that the proposed controller can drive ship to follow the desired path effectively with a smaller and smoother rudder angle in the presence of time-varying interferences such as wind, wave, and current. The sideslip angle, yaw rate, and the total unknowns can be determined accurately. Moreover, the rudder behavior would be promoted successfully by the presented switching reference heading method.
The main researches work in the future are: (1) Applying the controller designed in the article to large-scale ship maneuvering simulators. (2) Apply the improved algorithm to the actual ship. (3) Research collaborative control algorithms for multiple ships to achieve consistency control, formation control, obstacle avoidance control, etc.
Footnotes
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) received no financial support for the research, authorship, and/or publication of this article.
Author biographies
Yong Liu is a Associate Professor in Control Engineering. His area of research is ship motion control and nonlinear control.
Zongxuan Li holds a master degree in Nautical Sciences and Technology. His area of research is ship motion control.
Jun Liu is a captain. His area of research is ship motion control.