
Abstract
Motion simulators are becoming increasingly popular for many applications in which human sensation is important to replicate and optimize target motions. For the emulation of the perceived human acceleration, motion cueing algorithms (MCAs) have been proposed in the literature that mimics the motion sensation by a combination of actual acceleration and tilted gravity effects, termed g-force or specific force. However, their relative performance has not yet been analyzed. This paper reviews existing families of MCAs and compares their performance for a simple offline S-shaped planar test trajectory featuring only lateral acceleration. The comparison is carried out both numerically using two previously published objective measures, the “performance indicator” of Pouliot, Gosselin, and Nahon, and the “good criterion” of Schmidt, as well as subjectively by a preliminary passenger rating on a real motion platform—Robocoaster testbed. The results show that (a) the novel optimizing MCA group exploits more effectively the workspace of the motion platform than the traditional MCA group for reducing false cue with small scale error and shape errors, (b) path-dependent tuning of MCA parameters may improve motion sensation, (c) average subjective ratings can be made to correlate well with the “good criterion” when expanded with a penalty for false angular velocity cues, and (d) the scale error of specific force seems to play the most important role to the evaluation of test subject on the motion cue quality. However, still a strong variance in subjective ratings was observed, making further research necessary.
Introduction
Driving simulation systems are useful and affordable system applying on both training and researching human driving behavior. The systems have first used the parallel robot named Stewart platforms to generate the supporting motion. For reducing these costs and, most notably, extending the motion workspace, new motion platforms based on serial robots have been recently developed, enlarging the applicability of the simulating process. One example of these serial-robot ride simulators is the KUKA Robocoaster, used in the entertainment industry as well as for research purposes. 1 Common to all motion platforms, including serial robots, is that exact target motions cannot always be precisely reproduced due to the limited workspace. In these cases, the motion cueing algorithms (MCAs) play an important role in mincing the benefit motion sensations that can be reproduced by motion platforms in the restricted available workspace. MCAs divide the target acceleration into the high-and low-frequency parts. While the high-frequency (HF) parts are reproduced by the transient linear acceleration of the motion platform, the low-frequency (LF) parts of acceleration are simulated by the tilt coordination technique. The principle of the technique is to tilt the motion platform a suitable angle to treat the human vestibular system. However, the interaction between the threshold of human motion perception and the restricted available workspace of motion platforms often leads to false cues. The negative cues induce simulator sickness because the visual, vestibular, motion perception have no consistency information. For example, when perception thresholds for tilt-angle g-force emulations are exceeded, drivers can feel the rotational motions that do not exist in the target motion. Recently, various MCAs have still been developed for different motion platform, thus, for a specific simulation task, selecting the best MCA and tuning its parameters are still the open problems.
Existing MCAs employ different techniques to blend tilt-angle g-force and proper motion acceleration. At the origin of MCAs, classical MCA (or named washout filter) was proposed by Conrad and Schmidt 2 consisting of a low-pass filter (LP) cross-coupled with a high-pass filter (HP), whose parameters were manually adjusted offline. Due to its simplification in tuning and deploying, this algorithm has been broadly used in commercial driving simulation systems. However, the ineffective exploitation of the available workspace is the weakness of the algorithm. Besides, the classical MCA generates false cues due to the linear characteristics of the washout filters. For better exploitation of the serial robot workspace, such as the KUKA Robocoaster, the classical MCA was modified into “cylindrical classical algorithm” by Giordano et al. 1 The authors implemented the washout filters in a defined cylindrical coordinate by which the end-effector can move along both the linear and circular motion. Therefore, the cylindrical MCA can generate larger lateral accelerations than the classical MCA. In order to adjust parameters of washout filters in realtime, the “adaptive washout filter” was introduced.3–5 The cost function of the adaptive method uses the steepest descent technique that is to minimize motion cue errors and to restrict linear movements of motion platform deviation of the filtered acceleration signal from the target signal. The adaptive MCAs decreases the false cues compared with the classical MCA, however, the stability of adaptive MCAs significantly depends on its parameters. 6 Further development has been to design MCAs that minimize a cost function involving the assumed perception error at the vestibular system and energy terms over the complete track. This family of methods, firstly introduced by Sivan et al., 7 solves the stochastic optimization problem to find higher-order washout filters for four couple motions. The Optimal MCAs were later improved by Nahon and Reid 6 and Telban et al. 8 who use different mathematical models of vestibular systems. Zywiol and Romano 9 considered on the tracking problem of simulated and target signal to propose a time backward optimal MCA. The algorithm solves the tracking problem with the linear model of tilt-coordination in offline mode to find the best exploitation of the available workspace for both translational and rotational motion. More recently, also novel model predictive control (MPC) was applied to the problem of motion cueing. The algorithm takes the various restriction into account, such as workspace limits, the motion perception thresholds (angular velocity, perception of linear acceleration), etc.10–12 These algorithms show substantial improvements in motion sensation fidelity and are able to fill better the available workspace, but still, have some limitations in terms of computational efficiency and avoidance of false cues. Khusro et al. 13 proposed a nonlinear MPC solution that uses the Stewart platform’s nonlinear kinematics into the MPC algorithm to improve cueing fidelity and maximize workspace. The author also employed the adaptive weights tuning to smooth the platform’s movement toward its physical limits. 13 Katliar et al.14,15 developed an MPC-based MCA for a Cable-Robot-based motion simulator that includes motion platform actuation. Their key conclusion was that an MPC-based MCA with a complex model can be executed in real time with the right software and numerical approaches. Katliar et al. 16 used a model predictive controller (MPC) for real-time control of a motion simulator based on an 8-degree-of-freedom serial robot. By moving the human participant sitting within the cabin positioned at the end effector, the controller aims to properly duplicate six reference signals (accelerations and angular velocities in the body frame of reference) acquired from a simulated or actual vehicle. Besides, the use of a nonuniform weighting strategy to stabilize the MCA using MPC with a short prediction horizon and improved weighting modification is proposed in the study of Mohammadi et al. 17 The author mentioned that reduced prediction horizons are beneficial because they reduce computing strain, but they also move the system toward instability. Moreover, Asadu et al. 18 proposed a method based on compensators and generic algorithm that has the goal of minimizing the fitness function, which can lead to greater fidelity motions and better solutions. The following factors are considered when creating the fitness function such as minimizing the translational and rotational human sensation error between the real and simulator drivers; maximizing the correlation coefficient; minimizing the angle and linear displacements; minimizing the acceleration, velocity, and displacement of the platform; and minimizing sensation error fluctuations.
The objective of the present work is (1) to review currently available MCAs for the families of classical, adaptive, optimal control, and model-predictive control algorithms in offline mode; (2) to numerically compare their performance for a simple planar S-shaped test ride using two existing objective measures for perception evaluation, the “performance indicator” of Pouliot et al., 19 and the “good criterion” of Fischer 20 ; and (3) to correlate the thus obtained objective measures with preliminary subjective ratings on a real simulator ride.
The rest of the paper is structured as follows. First, the testbed is described in Section 2. Section 3 then reviews briefly all existing MCAs, whose perception quality on the test ride is evaluated numerically in Section 4 and by preliminary subjective ratings in Section 5. The results finally are discussed in the conclusions section.
Driving simulator based on KUKA robocoaster KR500
The motion platform based on KUKA robocoaster is applied for a driving simulator due to its flexibility in rotational motions that are restricted in the steward motion platform. For example, the motion platform in the Laboratory for Mechanics and Robotics (LMR) at University of Duisburg-Essen uses a KUKA KR500/1 TÜV Robocoaster robot, shown in Figure 1. The motion platform can lift driver seating on a Maurer Söhne rollercoaster seat at the robot end effector. Besides, the head-mounted display unit—Visette45—provides the virtual reality of a 3D environment to the driver. The trajectory of the motion platform is generated by motion cueing algorithms and then transferred to the robot’ controller. The virtual reality environment is simultaneously computed to the trajectory of the robot in the computer visualizing environment, then is delivered in stereo 3D to the head-mounted display. The physical limits of the robot’s joints are shown in Table 1. When compared to the Stewart platform, the KUKA robocoaster can reproduce a larger lateral motion by utilizing its enormous circular motion due to the large rotating space of the base joint (joint 1). On the other hand, the simulation of vertical motion is still restricted in a range of 0.127 m.

Architecture of the LMR driving simulator (base on Pham et al. 21 ).
Specification of the KUKA Robotcoaster.

Review of existing MCAs
There exists a great variety of motion cueing algorithms (MCAs) in the current literature. They are mainly devoted to mimic motion perception by a superposition of actual passenger acceleration with tilted gravity vector effects, termed the specific force. In a driving simulator, the motion cues are dominantly sensed by the vestibular system that perceives translational and rotational motion represented by specific force and angular velocity, respectively.
22
This section reviews the principal MCA families with particular interest on the transversal accelerations
Classical MCA with cylindrical coordinates (CL)
This algorithm (Figure 2), introduced by Giordano et al.,
1
applies the standard classical washout algorithm to cylindrical coordinates. Hereby, absolute Cartesian coordinates


Control diagram of classical MCA in cylindrical coordinate. 1
At the robot base, a vertically rotating frame


Classical algorithm’s parameters. 1

Adaptive MCA with cylindrical coordinates (AD)
The algorithm (Figure 3) is developed from the classical MCA with cylindrical coordinates by using a steepest descent method in an adaptive block “

Here,

Control diagram of adaptive MCA in cylindrical coordinates. 5
Parameters of adaptive MCA in cylindrical coordinates. 5

Optimal washout MCAs (OpS, OpNR, Tel-YoMe, and Tel)
The problem was first raised by Sivan et al.
7
The authors defined the linear quadratic optimal control for tilt coordination problem to find higher-order filters


Here,


Control diagram of optimal washout algorithms. 8
Dynamic states applied in the model of optimal problems.
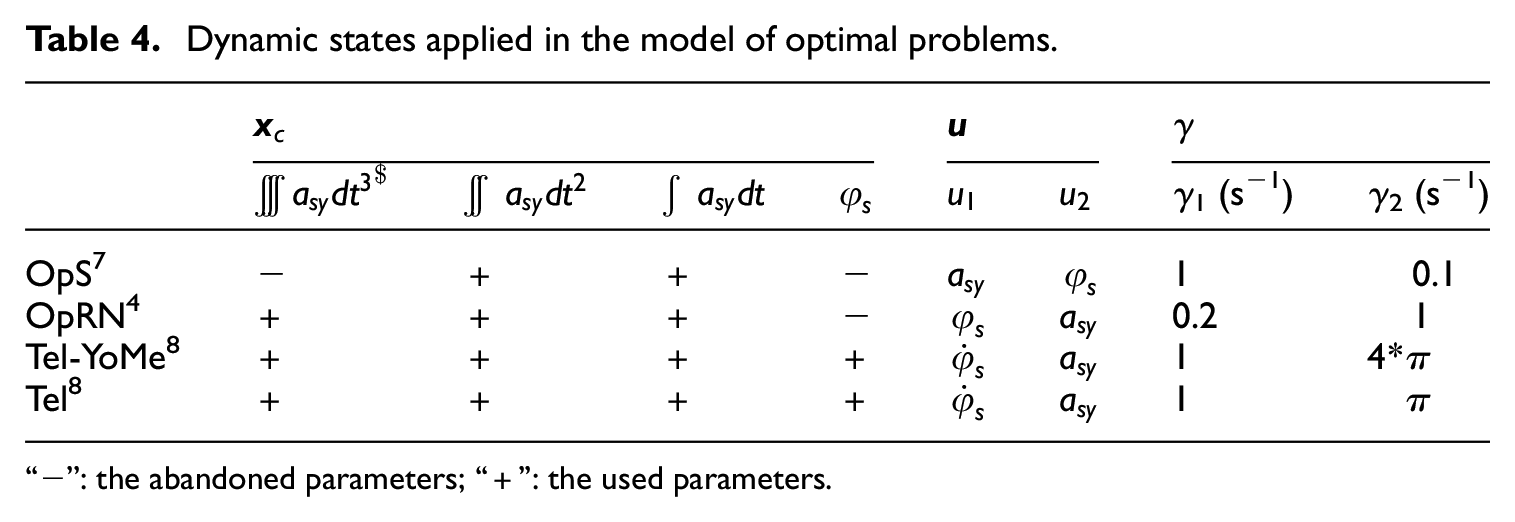
“−”: the abandoned parameters; “+”: the used parameters.
Weighting parameters of the optimal washout algorithms.

while, the second equation has the matrices as equation (8).

Moreover, the state matrix

with equation (10).
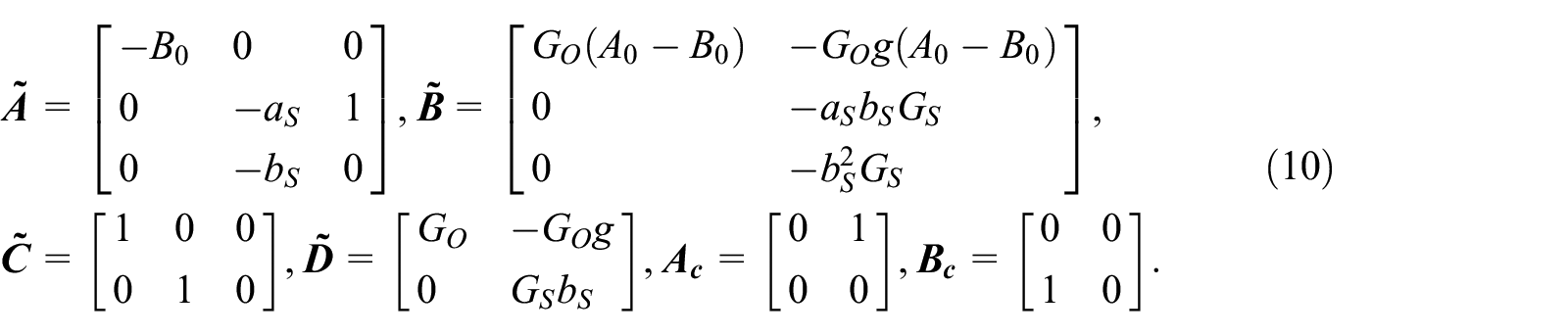
Here,
The otolith parameters (sway direction).

“−”: the abandoned parameters.
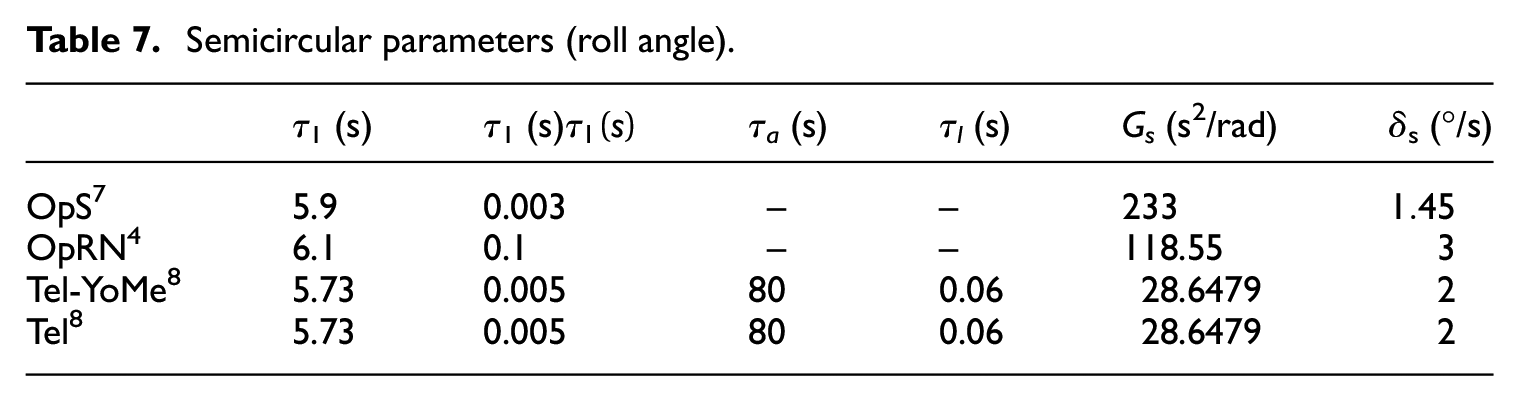
Semicircular parameters (roll angle).
Telban et al. 8 (Tel) extended these models to higher-order filters

and

for the semicircular and otolith system, also using a Young-Meiry vestibular model (Tel-YoMe). An intermediate filter complexity was introduced by Nahon and Reid
6
(OpNR). Tables 6 and 7 summarize the parameters used in these optimal washout signals, where missing parameters mean that this order is not present in the transfer function. The scalar elements

where

Note that the solution of the algebraic Riccati equation P is the unique and non-negative.

The washout filter works by first transforming the target acceleration
Offline optimal control algorithms (ZyRo and ZyRo*)
The algorithm was first introduced by Zywiol and Romano,
9
solves the tilt coordination as an optimal output tracking problem, whose cost functional (equation (16)) is minimized by the appropriate time-variant input vector (controlling vector)


where matrix U, which is the positive semi-definite, is the solution of the following differential Riccati equation (equation (18)).

Note that

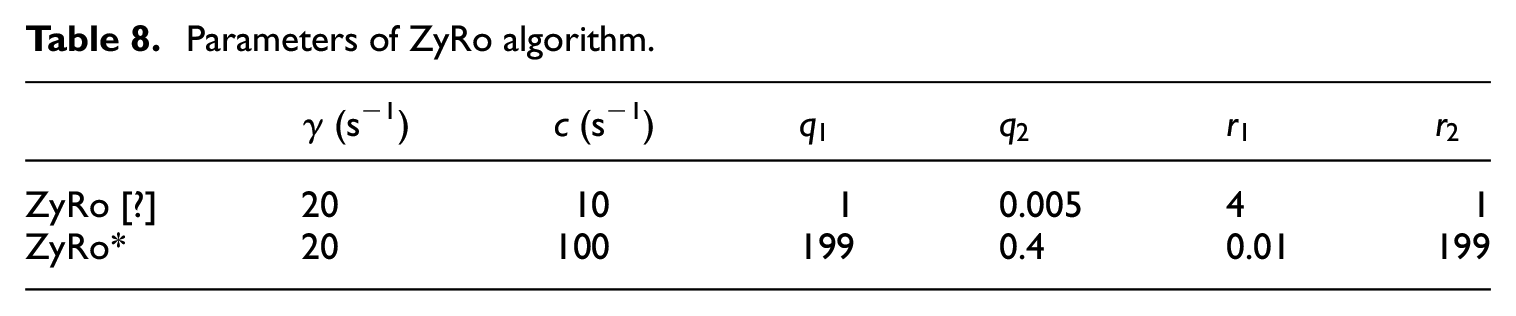
The components of weighting matrices

Control diagrams of Zywiol Romano optimal algorithm. 9
Parameters of ZyRo algorithm.
Model predictive control algorithms (MPC and MPC*)
MPC algorithms base on model predictive control for the tilt coordination problem. The MPC is the multivariable optimization method that generates the best future behavior of a plant output by observing possible responses in a future fixed interval (prediction horizon). The possible responses are computed with corresponding parametrized future inputs over the prediction horizon while respecting the defined constraints. Therefore, the MPC algorithms can deal with both simulator limitations and human motion perception thresholds. Moreover, the algorithm can improve the motion cueing quality. There exist implicit MPC 10 based on an online optimization technique with Quadratic Programing (QP) as well as explicit MPCs 12 based on an offline optimization technique.
Implicit MPC motion cueing algorithms
With the aim of reproducing the target specific force while keeping the simulator cabin inside the simulator workspace, Augusto and Loureiro 10 designed an implicit MPC algorithm by the minimization of the cost functional (equation (20)).

where

Original control system of MPC algorithm.
Weighting values of MPC.


Control system of MPC* algorithm.
Explicit MPC motion cueing algorithm
Based on the multi-parameter programing toolbox (MPT), developed by the Automatic Control Laboratory of ETH, Zürich, and the solution for the tracking problem, Fang and Kemeny designed the MCA based on an explicit MPC for real-time driving simulators (Figure 8), in which the optimized input vector minimizes the cost function (equation (21)) in the prediction horizon

For smoothing motion in the available simulator’s workspace, Fang and Kemeny used a braking control law which avoids the jerky stop at the limit position (equation (24)). Starting from state-space model (equations (22) and (23))


the braking law is defined as

which subject to equation (25)

where

Control diagram of the explicit MPC.
Explicit MPC parameters as tuned for the KUKA robocoaster motion platform.

Numerical comparison of MCA families
In order to compare the perceived quality of outcomes of the different MCA families, a simple virtual ride at a constant speed of

Results of MCA families of lateral specific forces and angular velocity for the test track – case 1: (a) simulated lateral specific forces and (b) simulated angular velocites.
Figure 9(a) for case 1 shows that most signals follow well the target specific force, except the original MPC, which displays a strong phase shift. On the other hand, Figure 9(b) shows that all MCAs violate the threshold level for the angular velocity, beyond which the tilt rotation is sensed as such and not as an increase of lateral g-force. Hereby, the most severe angular velocity threshold violation is reached by the exMPC algorithm. By scaling down the target accelerations (Figure 10), the angular velocity violations could be reduced for all MCAs except the exMPC algorithm, but the target specific force was not reached by all MCAs except MPC*.

Results of MCA families of lateral specific forces and angular velocity for the test track – case 2: (a) simulated lateral specific forces and (b) simulated angular velocites.
For the motion perception evaluation, only a few objective measures exist in the literature. A comprehensive objective measures were proposed by the “performance indicator” of Pouliot et al. 19 and the “good criterion” of Fischer. 20
The “performance indicator,”

Further, the “good criterion,”
20
separates the translational and rotational sub-indicators into a “scale” component (index “sc”) for estimating strong stimulation of simulated signals, and a “shape” component (index “sh”) for predicting the false cues in the simulated signals. We describe here the scale and shape components for the specific force that applies analogously to the rotational part. Considering on the time

At a sample point, the different components are equation (28).

The partial criteria for specific force components


From this, the “good criteria” for simulator cues and their time derivative are obtained as:


With





The comparison the two objective measures are shown in Figure 11(a), and the results of the partial “good” components in Figure 11(b), both for case 2, as case 1 produced too high false angular velocity cues for almost all rides.

Comparison of individual good criterion metrics – case 2: (a) performance indictors and (b) good criterion.
One can see that both objective measures yield a similar distribution for the different MCAs, and that the path-tuned optimal control ZyRo* algorithm displays the second-best perception quality. The algorithm has better both index of the good criterion than explicit model-control exMPC algorithm, which take computation times of approximately from 30 min to 3 h on a PC desktop with CPU type—quadcore 2.66 GHz, as compared to 1.5 min for the ZyRo* algorithm. The poor performance of the exMPC algorithm may be explained by the required handling of the ride simulator limits, which forces the simulator to decelerate even when the tilting angle is not yet large enough to compensate for the lack of specific force, leading to unrealistic departures from the target acceleration. Overall the here newly proposed adapted MPC* and ZyRo* algorithms are shown to yield the best results for both objective measures. However, when the computational complexity of the MPC* and the ZyRo* are compared, the MPC* consumes roughly thirty times the ZyRo*. The length of the prediction horizon and the complexity of the control model used in the MPC* appear to be the reasons behind the large time comsuming. Moreover, the parameters of the ZyRo algorithm are transparent to the simulated quantities, making parameter adjustment easier than that of classical, adaptive, and optimum washout filters, as well as MPC*. However, because the washout effect is not used in the simulated angles, the steady-state must be adjusted to bring the final simulated angle to zero.
It’s worth noting that both MPC* and ZyRo* effectively use the motion platform’s workspace to discover the best combination of translational and rotational motion to reproduce the two biggest scaled specific forces. However, because the MPC* closely matches the target specific force in Figure 10(a), it provides angular velocity false cues.
Preliminarily subjective validation
The objective criteria normally provide the first estimation of the simulated motion fidelity regarding the predicted false cues. Considering the human perception, the second phase test of simulated motion with the real passengers was implemented in the next-step on the motion platform. The preliminary subjective tests are important to validate the correlation between objective and subjective measures. Similar tests were performed in Berthoz et al.
23
to investigate the effect of the washout-filters. The test was implemented with a total of 17 participants including 12 males and 5 females who have the age in range 20–30 years. The participants were asked to rate the 10 rides of case 2 on five satisfying levels in the range {very good, good, satisfactory, sufficient, not sufficient} corresponding to the grade scale
Subjective grade scale.

This scaling based on German school grading marks was used due to well-perceived by all test subjects and no more guide was needed. A participant successively tried 10 rides in arbitrary order and asked to give his/her evaluation after each ride. The interclass correlation for rates of 17 judges is
The individual subjective ratings (SS) and the scale factor (SF) of simulated specific forces are shown in Table 12. For the graphical representation, the “bubble plot” (Figure 12) uses the circle size to describe the number of rates for individual subjective scores which are fairly variable in the full scale 1–5, in general. However, there are also some abnormal rates for such worst ride (exMPC algorithm) that one participant gives the best score as “very good.” The abnormal scores are controversial and could be happened because the participants have the particular threshold of rotational motion cue.
Average subjective scores.

Individual subjective and objective score.
In order to compare the objective perception ratings with the subjective ratings, the partial components of the objective ratings were fitted by linear regression with the average subjective ratings. Besides, we introduced as an additional component for the objective rating a penalty-function

In a first round, we fitted the parameters

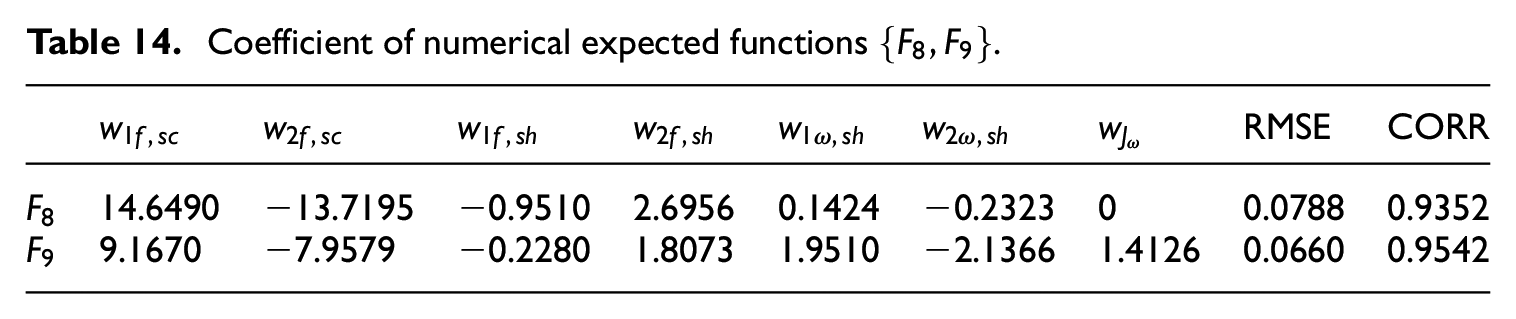
with the regress function in MATLAB. In order to have an idea of the impact of each term, we switched on and off each term for all possible combinations. The results are shown in the Table 13, which displays the root mean square error (RMSE) and Pearson correlation (CORR) for each combination of terms. One can see that both
Coefficient of numerical expected functions

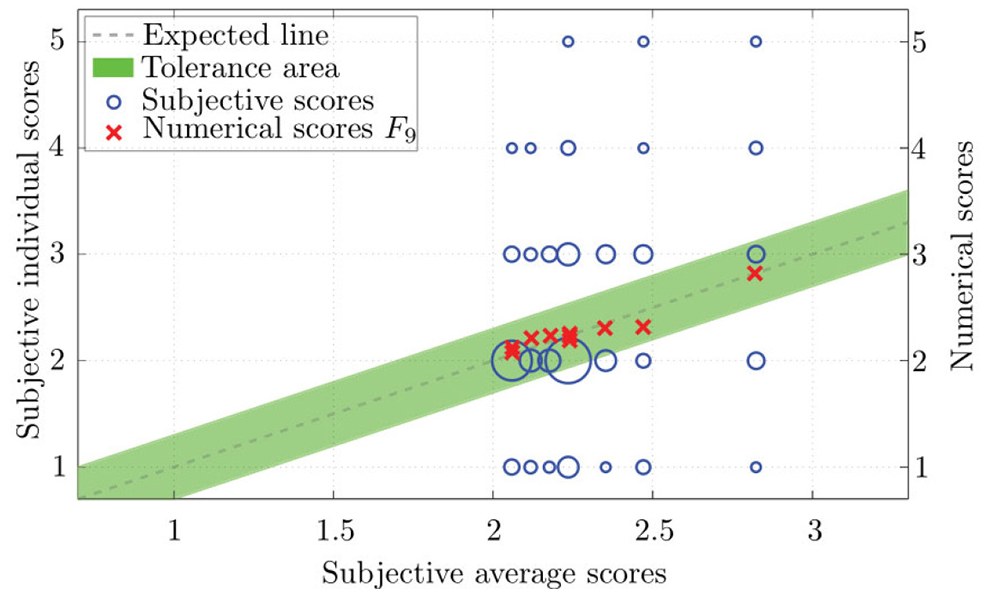
In a second round, we split the linear regression model even finer by taking into account all partial components of the “good criterion” as

The coefficients
Coefficient of numerical expected functions

MCA ranking by average subjective and numerical score.
The preliminary results thus show that (1) the individual objective parameters
Conclusions
The present paper first reviews the families of offline MCAs from the literature including the classical washout, adaptive washout, optimal washout, optimal control, and model-predictive control MCAs. Then, the MCAs were implemented in MATLAB for virtual rides over a planar S-shaped curve with lateral acceleration only. Next, the comparison of their behavior and the performance evaluation are carried out using both “performance indicator” and “good criterion” in which the deviation of the simulated and target motion cues (specific forces and angular velocities) are estimated. The comparison of different simulated responses in the case
Footnotes
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This research is funded by the Hanoi University of Science and Technology (HUST) under project number T2020-SAHEP-013