
Abstract
Driving simulators have been utilized to test and evaluate products and services for a long time. Their complexity and price range from extremely simple low-cost simulators with a fixed base to very complex high-end and pricey six-degree-of-freedom simulators with the XY table. The recent novel technique that uses an industrial robot - KUKA Robocoaster - as an interactive motion simulator platform, allowing for a highly flexible workspace as well as significantly lower prices due to mass production of the fundamental mechanics. In the constrained workspace of driving simulators, motion cueing algorithms (MCAs) are commonly employed to merge the tilt gravity and translational acceleration components for simulating the linear acceleration in the real vehicle. However, there is a few MCAs developed for the motion platform, almost MCAs were implemented for the standard six-degree-of-freedom simulators in the Cartesian coordinate. The classical MCA in the cylindrical coordinate (ClCy) MCA was first developed for the novel motion platform to take advantage of enormous rotational motion to simulate lateral acceleration while compensating for the bothersome longitudinal acceleration (due to centrifugal acceleration appearing in the rotational motion) with a proper pitch tilted angle. The process of tuning MCAs for the novel motion platform is time-consuming due to both trial and error method and the disturbing motion cues generated by rotational motion, thus it needs the involvement of experts. Although there are several auto-tuning approaches for classical, optimal, and model-predictive control MCA based on fuzzy control theory or genetic optimization method, the methods were purely applied for Cartersian coordinate without taking the bothersome longitudinal acceleration into account. Therefore, this paper firstly presents the process of integrating MCAs in the novel motion platform utilizing rotational motion for simulating lateral acceleration. For the case, besides the ClCy algorithm, the classical algorithm developed for the standart six-degree-of-freedom simulators was a sample implementation due to its popular and familiar characteristics. Secondly, the proposal of the use of the mean-variance mapping optimization (MVMO) for auto-tuning parameters of the two algorithms for reducing both rotational false cues in roll and pitch channel, and longitudinal acceleration as well as washout effect. The simulation results prove that 1) The classical and other MCAs can be applied in the novel motion platform with the proposed motion conversion; 2) both algorithms with auto-tuned parameters have high performance in exploiting effectively the workspace of the motion platform, producing no false cues of angular velocity, conpensating the disturbed longitudinal acceleration, and pulling the motion platform to the initial position after the simulation task; 3) The auto-tuning method is so transparent that can manipulates the specific simulated quantities according to the tuning goals.
Keywords
Introduction
Driving simulation systems are a helpful and cheap technology that may be used for both instructional and research purposes. To provide the supporting motion, the systems originally employed a parallel hexapod robot called Stewart platforms which have a restricted area and relatively expensive prices. 1 New motion platforms based on serial robots KUKA Robocoaster have recently been created to reduce these expenses and, most importantly, to increase the motion workspace, therefore expanding the application of the simulating process2,3
The high fidelity level of simulated motion is ideally archived if the actual motion cues are totally exactly duplicated by the motion platform. However, the ideal motion cues are impossible to produce due to the motion platform's limited workspace. Therefore, motion cueing algorithms (MCAs) generate the scaled linear motion for the filtered linear high-frequency motion cues for by motion platforms and compensate the washout and disturbing cues by the suitable tilted angles. Concretely, the realistic acceleration is conventionally divided into two parts by MCAs: high-frequency and low-frequency. The tilt coordination approach simulates the low-frequency (LF) elements of acceleration, while the motion platform's transient linear acceleration reproduces the high-frequency (HF) components. The principle of the tilt coordination technique is to tilt the motion platform at a suitable angle to treat the human vestibular system. In this technique, the corresponding rotational rates are normally reduced to the perception threshold of the human vestibular system, so that the false cues of rotational motion are not perceived by the driver inside the simulator. The MCAs were specifically designed for various mechanical structures with reduced DOFs: the 2 DOF low-cost platform,4–6 3 DOF VTI simulator, 7 and 5 DOF motion platform; 8 with the 6 DOF: KUKA Robocoaster, 9 the 6 DOF Stewart platforms, 1 and 6 DOF Desdemona simulator in TNO; 10 with support axes as the 8 DOF driving simulator of the University of Leeds, 11 and for 8 DOF including KUKA Robotcoaster and an XY-rail, recently. 12
There are various kinds of MCAs combining tilted angles and appropriate motion acceleration to simulate target motion cues. The traditional washout filter proposed by Conrad and Schmidt (1970) divided a cross-coupled linear low-pass filter (LP) and a linear high-pass filter (HP). 13 For the novel motion platform, Giordano et al. (2010) developed a new motion cueing algorithm named “cylindrical classical algorithm” to exploit the workspace of serial robots such as KUKA Robocoaster. 9 This algorithm is the classical washout algorithm that uses rotational end-effector motion for lateral acceleration instead of linear motion, yielding a larger acceleration workspace for serial robots. The “adaptive washout filter”3,14–16 is a further modification of the conventional washout filter. In these methods, the washout filters’ parameters are systematically changed in real-time to optimize a cost function using the steepest descent techniques.
Later, Sivan et al. 17 created an optimum MCA, which was then refined by Reid and Nahon 3 and Telban et al. 18 The higher-order dynamic model of the vestibular system was later adopted by the authors. To make the simulated values match the target ones, the method employed higher-order washout filters rather than a classical and adaptive approach. Another offline optimum algorithm developed by Richard Romano 19 and Zywiol 20 focused on determining the best mix of linear acceleration and tilt angle to imitate target motion signals. Besides, a unique optimum technology – model predictive control (MPC) – has recently been applied to address the problem of finding the right motion under the restriction of workspace boundaries and motion perception threshold.12,21,22 According to the literature, the objective tuning parameters is to identify the suitable parameters, with which the MCAs create the simulated quantities within the required ranges or objective criteria such as performance indicator, 23 Indicators for Reference Tracking Performance: Root Mean Square Error; Correlation Coefficient; Estimated Delay; and Indicators for Workspace Use: Interquartile range (IQR). 24 Due to trial and error, the tuning process takes a long time and needs the assistance of specialists. Furthermore, Several auto-tuning techniques for various algorithms, including classical algorithms, optimum, and model-predictive control, based on the genetic approach have recently been used to discover the best values for parameters.25–27
Note that most of all MCAs were developed for the Cartesian coordinate system motion platform, thus, the algorithms cannot be applied to every type of motion system. Besides, parameters of the algorithms are not clear physical meaning to be tuned for exploiting the flexibility of the novel motion platform. Therefore, this work focuses on 1) proposing an integration process for the MCAs, classical algorithm proposed by Reid and Nahon 3 as an example, into the motion platform based on KUKA Robocoaster; 2) proposing an auto-tuning process with mean-variance mapping optimization methods to improve the high performance of novel motion platform: tracking scaled motion cues, exploiting the workspace, and sastifying perception fidelity criteria such as removing rotational false cues in both roll and pitch channel, compensating the longitudinal acceleration, producing suitable scaled motion cues, and return to the initial position at the end of the simulation (washout-filter effect).
The remainder of the paper is organized in the following manner. Firstly, the coordinate systems are defined in the motion platform based on KUKA Robocoaster and the problems of integrating MCAs are presented in section 2. Secondly, the computation of trajectory generation for the end effector of the robot is introduced in section 3. Thirdly, the auto-tuning parameters process for CLRN and ClCy is described in section 4. The simulation results are discussed in the conclusion section 5.
Introduction of motion platform based on KUKA Robocoaster and the referecen frames
The motion platforms based on KUKA Robocoaster are used in several German organizations such as Max Planck Institute with MPI CyberMotion simulator 28 and in the Laboratory for Mechanics and Robotics (LMR) at ‘The University of Duisburg- Essen 29 (in Figure 1) with the specification in the Table 1. The motion platform consists of a KUKA KR500/1 TÜV Robocoaster robot with a Maurer Söhne rollercoaster seat mounted at the robot flange, a Visette 45 head mounted display unit, an A.R.T. The virtual reality environment is smoothly generated by the 3D engine and visualized in stereo 3D on the head-mounted display. A matching the trajectory is simultaneously provided to the motion platform as a function of time from the datasets delivered (offline) by the motion cueing algorithms. The input trajectory file contains the relative poses of the according to the sample time with time-step of 12.5 ms.

The motion platform based on KUKA robocoaster.
Specification of the KUKA robocoaster.

Figure 2(a) shows the location of the reference frames and their relative position. Here, the inertial reference frame

The position of KUKA robocoaster reference frames.
The inertial reference frame 

Reference frame 
In oder to generate the relative pose of the motion platform, the relative position and orientation of the frame KE w.r.t its initial position are firstly computed, then the inverted kinematic computation are applied. Therefore, several reference frames are defined as follow
The reference frame
The reference frame 
Trajectory generation of KUKA Robocoaster
As mentioned above, the desired motion from an MCA, the classical MCAs as an example in Figure 3, divides target acceleration

The diagram of robot trajectory generation for simulation of the pure lateral acceleration.
The block “
Figure 4 shows the process of computing the trajectory for the KUKA Robocoaster in detail. The input data entering into the “
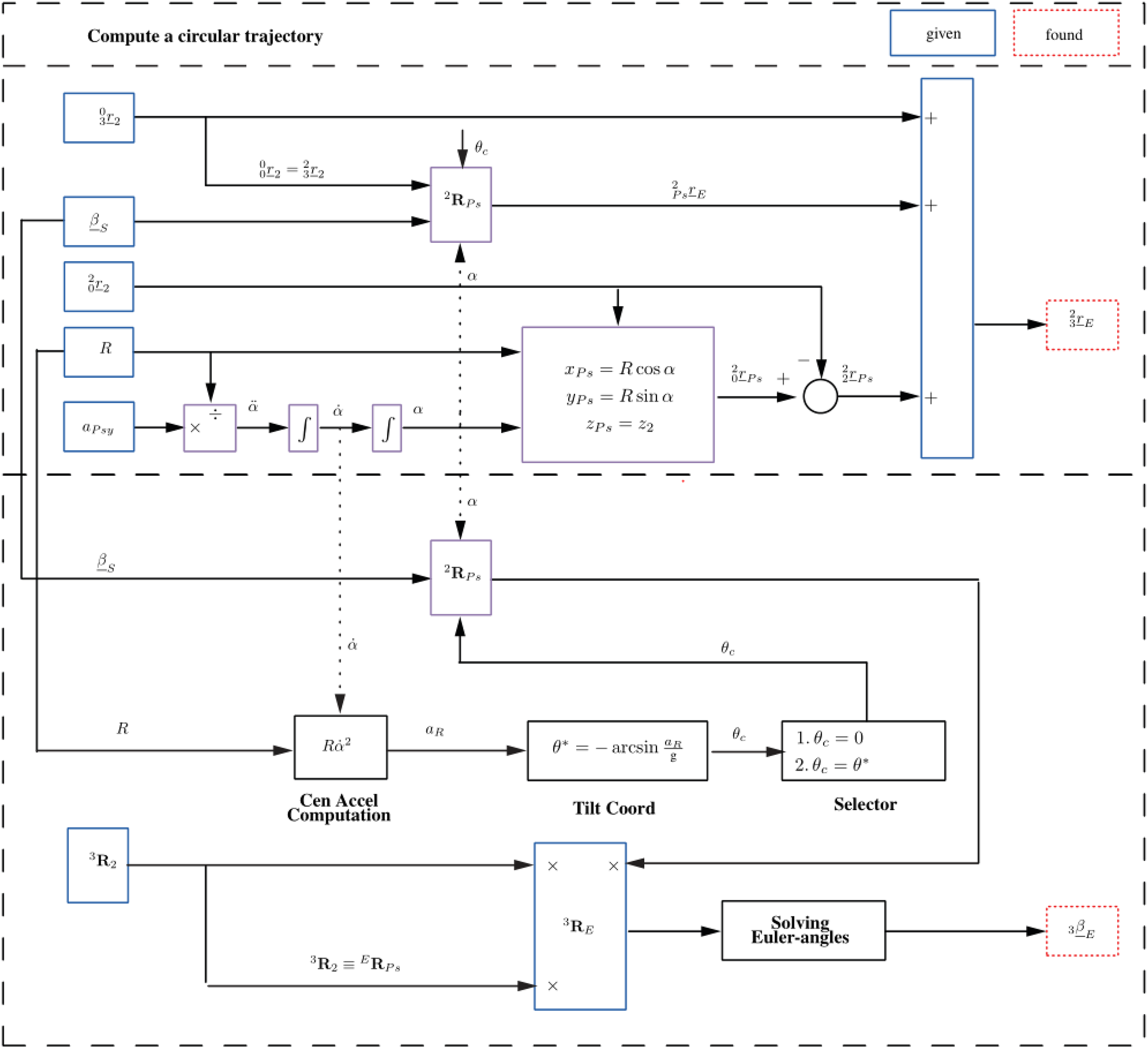
The diagram of the computing the circular motion.
The “


























Here,
Objective criteria and auto-tuning process for MCAs
White and Rodchenko 30 mentioned that the effect of the MCAs parameters on motion fidelity is still ambiguous. Thus, it is not a clear method for improving the fidelity by enhancing the benefit motion cues stimulating the vestibular system or combining motion cues from the multi-sensory system. In the literature, the tuning process for an MCA, which is an almost classical algorithm, is usually implemented in two steps. At first, the parameters are tuned to minimize the motion cues errors or use the Sinacori criterion, 31 then the achieved parameters are validated by the subjective test There are several works mentioning the relationship between the parameters of the classical algorithm with the motion fidelity. For instance, Grant and Reid 32 analyzed the effect of the washout filters’ parameter on the false cues and introduce a way to reduce the undesired cues by adjusting the scale factor k, break frequency of the washout filters, and rotational threshold. etc. Later, Grant et al., 33 Bruenger-Koch, 34 and Jamson 11 implemented research on some set of parameters of the classical algorithm to assert that the suitable parameters provide better motion fidelity with reduced shape error, and increase scale errors. Although the tuning processes were not mentioned in detail, the response of the washout filters could be the result of reducing false cues by flattening the bode plot. From the review of the objective tuning method, the paper uses the objective criteria for the parameter tuning process by trial and error method 27 and proposes an automatic tuning process that improve the performance of the MCA (Figure 5) as in the following parts.

Tuning methods for a MCA.
Objective criteria and trial and error tuning process
Normally, for the objective tuning process, the parameters of the MCAs are tuned to meet every objective criterion defined by the workspace limitation and the constraints of the motion perception. In the paper, the objective prioritized criteria Ci, with i = 1 − 4 for the tuning process are described as following in detail:
C1: Limiting the simulator's movement and avoiding the vertical false cues by which there is none of the limit violation and the protection of the tilt-coordination technique. C2: Avoiding the rotational false cues and unexpected false cues due to the tilt angular acceleration and avoiding the false cues of the specific force C3: Select the suitable scale factors to avoid too weak cues. C4: Exploiting the available workspace for linear simulated acceleration and pulling the motion platform to the initial position at the end of the simulation task.
Based on the 4 tuning criteria, the trial and error tuning process (Figure 5) considers C1 as the most significant criterion, while C4 is considered as the least significant one. The tuning process of a MCA firstly convert the desired linear motion to corresponding circular trajectory of the novel motion platform and compute the simulated quantities by the “
Auto-tuning process for objective criteria with Mean variant mapping optimization method
The trial and error tuning process is time consuming and depends on the designer's experience with each of MCA, thus, a common auto-tuning process being able to applied any MCAs was developed with novel optimization method named Mean-variance mapping optimization (MVMO). The method developed by Erlich et al. 35 is a member of the family of so-called population-based stochastic optimization techniques, which incorporates information on the performance of the specific number of best individuals to minimize a particular cost function. Comparing to other heuristic approach, the MVMO uses the special mapping function with variant mapping curve shape and location influenced by the seaching process. The MVMO has better convergence than other heuristic methods in IEEE 57 and 118- bus system test case in a comparative study for optimal reactive power dispatch with defined constraints. 15
In order to automatically tune the MCA parameters, an optimization can be run using the objective measure as a cost function of the workspace limits and motion perception cues. This is described in the following for the case CLRN.
For auto-tuning the cost function with regard to the criteria 

Exponents penalty function and the effect of the penalty functions the angular velocity.
Workspace penalty function J1
The position penalty function 
Denote 


False cue penalty function J2
This function manipulates three kinds of potential false cues which are angular velocity, acceleration over their threshold levels (Figure 6) and serious missing cues of the simulated specific force.
The rotational false cues due to the angular, 
Similarly, the penalty function for angular acceleration is defined as
The serious missing cues (distorting cues and negative cues shown in Figure 7) of the simulated specific forces can be numerically described by the square error of the simulated specific force 
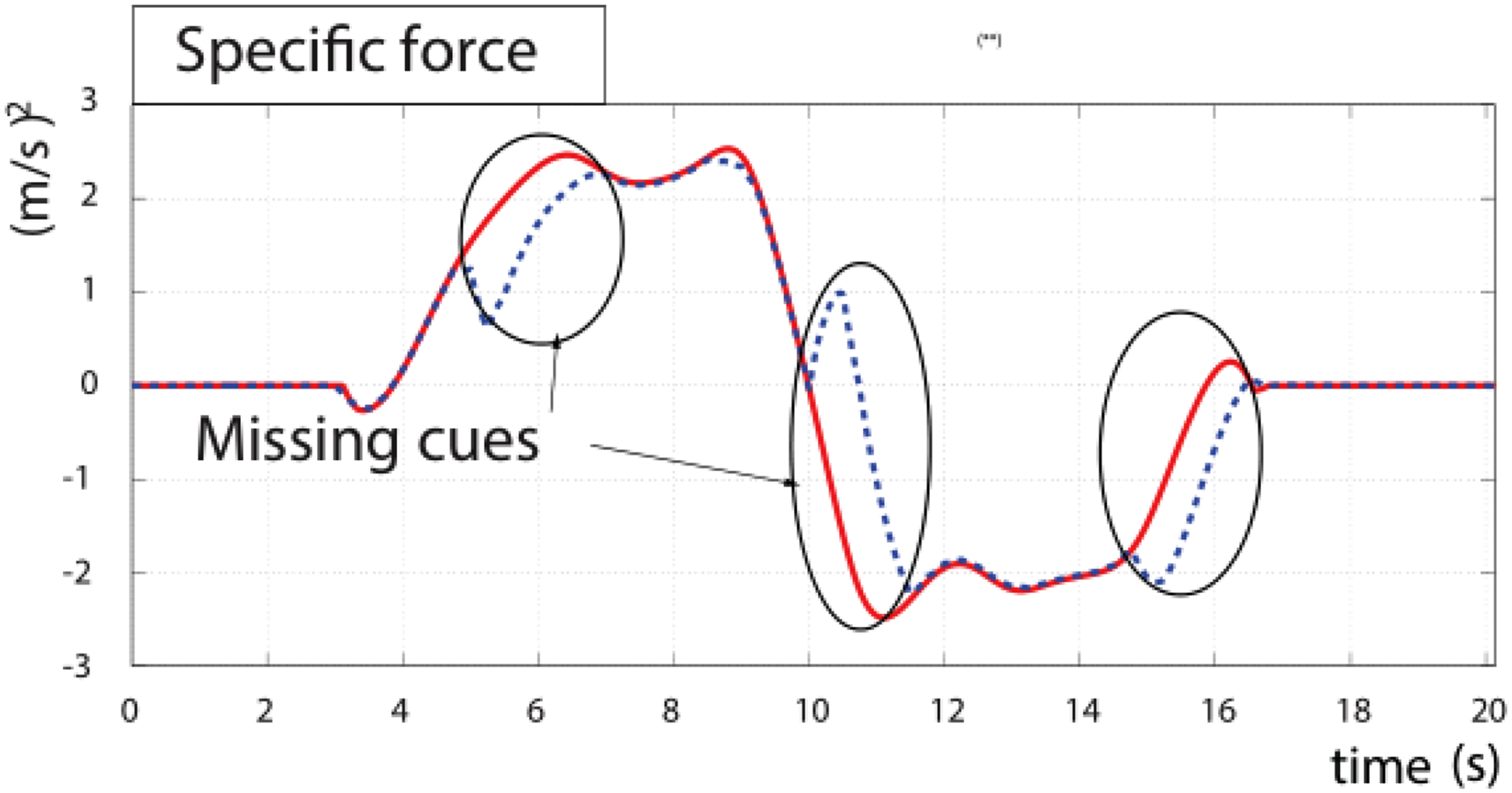
Types of false cues specific force.
Here the simualted scale signal
There errors should be smaller than the threshold value of the otolith system 
The penalty function 
Exploiting workspace penalty functions
The workspace of the motion platform can be effectively exploited if the ratio of simulated acceleration to the target acceleration is increased. Thus, the ratio 
Considering the washout effect of an algorithm, the penalty function 
Result and discussion
The method of calculating the robot's motion trajectory is successfully applied to both algorithms, CLRN and ClCy corresponding to Casterian and Cylindrical-coordinate systems, to implement the
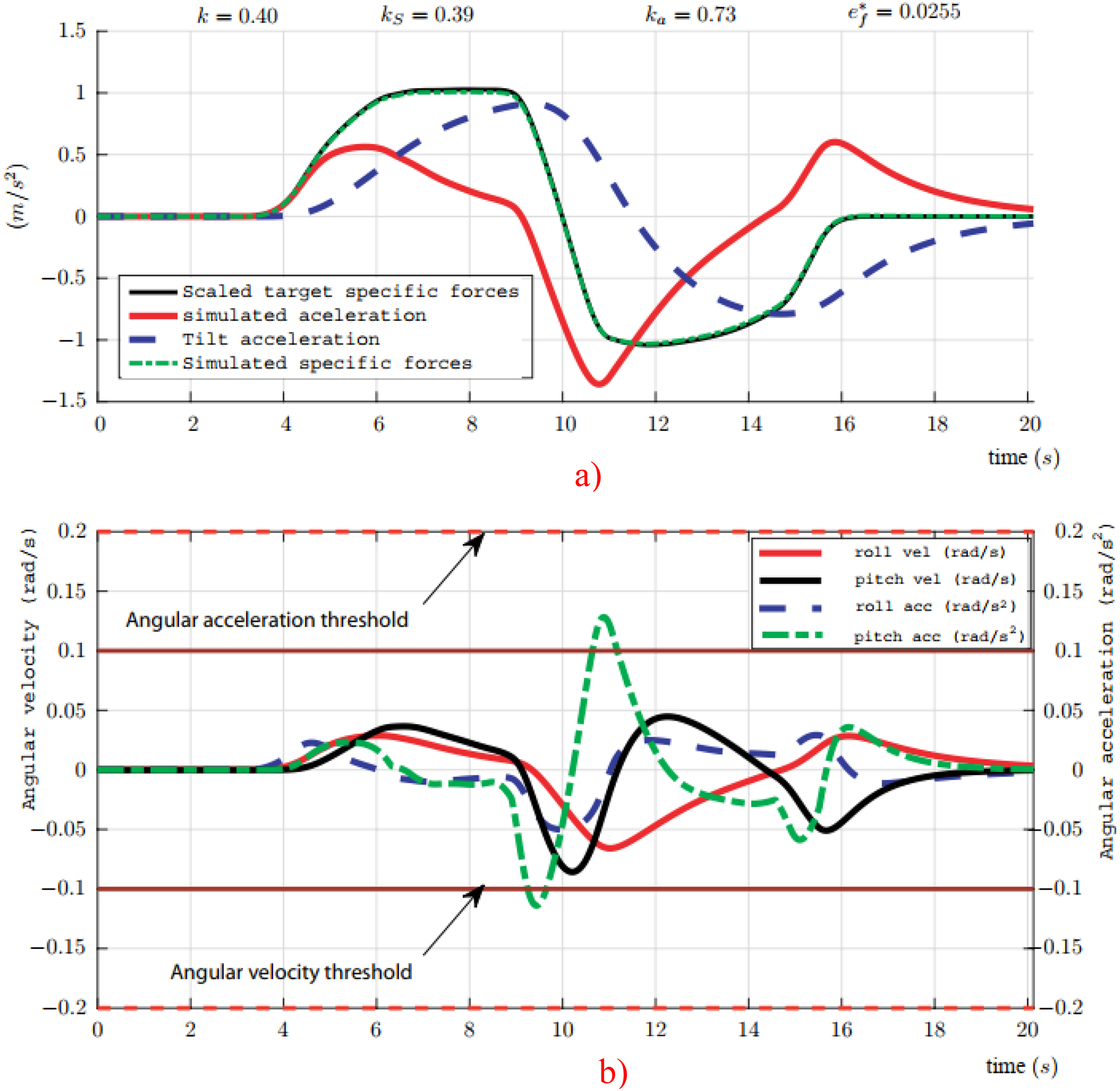
The parameters of two MCAs algorithms are tuned both with trial and error and with auto-tuning method for the simulation case that is the pure lateral acceleration of a roller coaster moving with constant velocity on a flat S-shaped track (the scaled of lateral acceleration shown by solid black line in Figure 8(a)). For the trial and errors tuning method (Figure 5), first the simulated quantities are used to compute the objective criteria C1−4 of motion perception that relate to the specific factors as the simulated scale factor kS, ratio of translational motion ka, shape errors of specific forces ef, and the restricted angular velocity and acceleration with limited values in Table 3. Because the parameters of the MCA are not transparent to the objective criteria, the noticed changes of the objective criteria and the simulated quantities for every trials are observed and recorded for the next trials. The tuning process can stop when all the objective criteria reach to its desired values. For the first tuning parameters with trial and error method, it consumes neary two hours for each algorithm for fine adjusting each parameters.
Responses of the
Selected threshold and limited range for tuning quantities.

Figure 8 and Figure 10 depict the translational and rotational motion of the simulation platform with the trial and error parameters of the CLRN and ClCy algorithms. In the simulation result, the target lateral specific forces are scale down with the with the scaling factor
Responses of the
In addition, Figure 8(b) and Figure 10(b) depict the simulated angular velocities and angular accelerations both below the perceived rotational motion (the factors in the criteria C2). Note that, although only lateral acceleration is simulated, the algorithms generate pitch angles to compensate for the centrifugal acceleration caused by the circular motion of the robot. The CLRN algorithm produces smaller roll velocities and accelerations but larger pitch velocities and accelerations than the CyCl algorithm. This is because the CLRN algorithm with
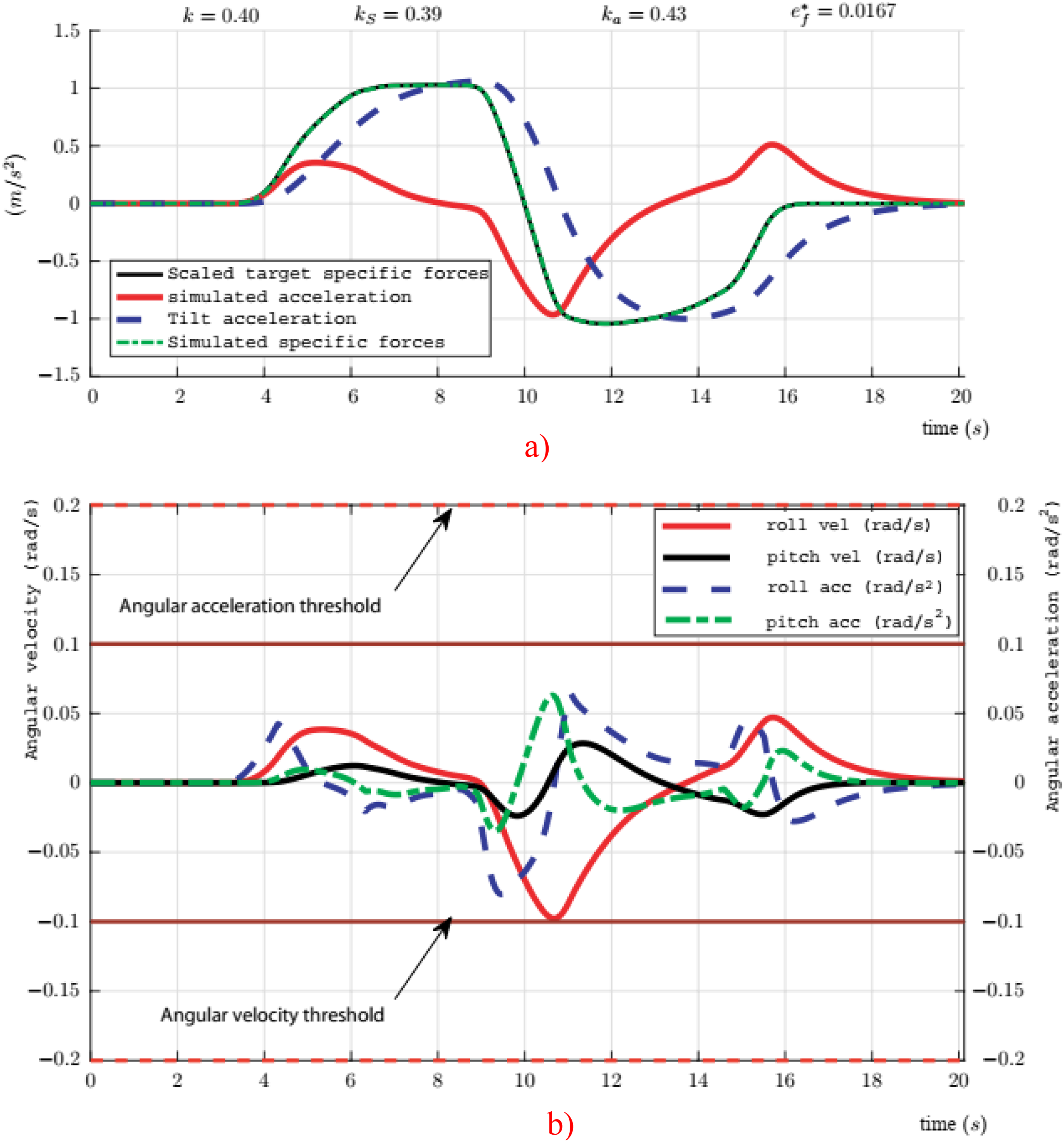
By applying the parameter found by auto-tuning method with MVMO for CLRN and ClCy, the limit values for the simulated quantities used for the penalty functions are list in the Table. 2 and Table 3. Besides, the weights of cost function terms are selected according to the priority levels (C1 is the most important) of the objective criterial (Table 4). The priority levels presenting by the values of weights guide the auto-tuning method to provides the parameter sets with which the simulated quantities can be implemented in the motion platform with desired motion fidelity. The selection of the weighs is easy to approach due to its transparency related to the objective criteria/penalty functions. The undesired behaviour of the simulated motion can easily be solved by fine tuning weights according to the penalty functions related to behaviour. For example, if the simulated angular velocity is above its threshold values, the weight
Position and orientation limits of the End of effector w.r.t to the intial pose.

Selected weighting values of the penalty functions for CLRN and clCy algorithms.

The simulation results (Figure 9 and Figure 11) show that the simulated specific force of both CLRN and ClCy algorithm not noly tracking the scale targets specific force with larger scale factors but also preventing the false cues of motion. In concretely, the ratio of the circular motion of CLRN has been adjusted down (

Responses of the

Responses of the
Conclusion
This paper presents a method to integrate MCAs algorithms built on a cartesian coordinate system into a driving simulation system using KUKA Robocoaster. This integrated approach exploits the KUKA Robotcoaster's ability to use circular motions to reproduce high-frequency lateral accelerations while eliminating false cues caused by centrifugal acceleration. Next, the method of parameter auto-tuning of the algorithms is proposed to adjust the parameters of the CLRN and ClCy algorithms with the criteria of workspace limitation and exploitation, and false cues restriction for both roll and pitch channel, as well as improve the washout effect. The test results of applying the two algorithms, CLRN and ClCy, to the roller coaster simulation with only lateral acceleration show that the CLRN algorithm can be applied offline to the KUKA Robotcoaster using the appropriate robot trajectory calculation steps. The parameter auto-tuning method with objective functions related to mentioned tuning criteria can find the right set of parameters for the effective use of the motion platform's workspace while ensuring the elimination of false cues including the dirturbing cues due to the rotational trajectory of motion platform. The auto-tuning method provides the transparent method for specific performance criteria and has the quick convergence with small test samples. Thus, the method save the time consuming comparing with the trial and error approach. In addition, this method is also applicable to different algorithms based on the common objective function in the process of finding suitable parameters. In particular, the washout effect objective function in the cost function of the auto-tuning method forces the simulation platform to return to its initial state. The washout effect normally consumes tuning time by trial and error. The preliminary results of auto-tuning method prove the applicability of the method to other algorithms with other tuning criteria suitable for specific simulation goals in the future.
Footnotes
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) received no financial support for the research, authorship, and/or publication of this article.