
Abstract
This paper addresses the adaptive control of a class of time-varying nonlinear systems. Under the framework of Immersion and Invariance (I&I) adaptive control, a set of sufficient conditions is obtained to stabilize the concerned time-varying nonlinear systems. It is shown that the presented controller can also be utilized to complete tracking control for a class of nonholonomic constraint systems if the desired trajectories satisfy certain conditions. The effectiveness of the new adaptive controller is demonstrated by some numerical simulations on a nonholonomic mobile robot.
Introduction
The control issues of time-varying systems were studied by many scholars in a relatively long time. 1 Time-varying systems can be roughly classified as time-varying model structure, 2 time-varying model parameters,3–5 and time-varying feedback systems, 6 etc. Compared with the research on the control method of time-varying linear system, 7 the research on the control method of time-varying nonlinear system has been addressed relatively less. In this paper, the stabilization of a kind of nonlinear system with continuous time-varying model parameter is investigated. The purpose of the present article is to utilize the I&I adaptive control approach to obtain global result in stabilizing the concerned kind of time-varying nonlinear system. In particular, the developed new I&I adaptive controller design method should be able to be used for trajectory tracking control of the first-order nonholonomic mechanical system.
Adaptive control of nonholonomic systems is a relatively active research field. 8 This topic has been discussed in plenty of literature.9–17 Compared with the researches about the stabilization issues of various nonholonomic systems,9,18 we notice that the researches about the tracking control of arbitrary trajectory for the nonholonomic systems are relatively less10–16 and the trajectory tracking control of nonholonomic mobile robot remains an open problem. 19 Earlier studies on adaptive tracking control of nonholonomic systems only revealed that the nonholonomic systems could track certain special trajectories, such as straight lines 10 or circles. 11 This situation was more systematically discussed in, 12 which revealed that the target trajectories provided to a nonholonomic system should satisfy the nonholonomic constraints. Therefore, for the arbitrarily given trajectories, the best tracking result for a nonholonomic system is uniformly ultimately bounded or asymptotically stable. This result then has been confirmed by the researches of adaptive tracking control for specific mobile robot.13–14 In the papers 13 and, 14 even though the trajectory tracking control problem was investigated with regard to the nonholonomic mobile robot, which is actually a third-order nonlinear system with nonholonomic constraints, the adaptive controller presented in 13 used output feedbacks, while 14 used a special coordinate transformation. A similar approach used in 14 can also be observed in. 15 As these control methods depend on the special property of the specific robot prototype, it is not clear how these control methods could be applied to other more generally similar systems. More recently, robust adaptive tracking control of nonholonomic systems 16 and control of stochastic nonholonomic systems 17 also have been investigated. However, using non-smooth feedbacks 16 or non-continuous feedbacks 17 to increase the closed-loop system's robustness commonly causes impractical non-smooth control inputs.
Since the I&I adaptive control method was presented by Astolfi and Ortega 20 to stabilize certain classes of nonlinear system, the method was rapidly developed by a variety of literature which were systematically organized in the monograph. 21 In more recent years, this novel tool was also developed to stabilize some more intractable systems, such as under-actuated mechanical systems,22–26 speed observers for systems with nonholonomic constraints, 27 and nonlinear system with time-varying parameter. 28 In literature, 29 a different procedure to realize the construction of I&I controller for stabilizing nonlinear system was also presented by applying the contraction-based method. It is worthy of mentioning that, besides the I&I-based controllers were mainly developed for autonomous nonlinear systems during the past time, the I&I adaptive controllers were also mostly adopted for dealing with the unknown structure parameters of a controlled system. However, there are few studies on I&I adaptive control to stabilize time-varying system.
In this article, the I&I adaptive controllers are utilized in a new way. More specifically, the introduction of the “off-the-manifold” coordinates in designing a controller is used to construct an auxiliary dynamic subsystem, such that the responses of the primary dynamic subsystem could be influenced by the auxiliary dynamic subsystem. By constructing an auxiliary “regressor”, we can show that the adaptive law can influence the developments of the states of the nonlinear systems, such that partial states of the time-varying nonlinear system could be implicitly stabilized by following the trajectory of other states. It provides additional flexibility to design the control laws for the time-varying nonlinear systems. The originality of the presented paper is that the I&I adaptive control approach is firstly developed to stabilize a kind of nonlinear system with time-varying drift vector fields. As a result, the control law obtained here for stabilizing the type of time-varying nonlinear system can be utilized for trajectory tracking control of a kind of nonholonomic constraint system. The I&I-based adaptive control law has certain good properties, such as smooth control inputs, exponential convergence and small overshoots for the closed-loop systems, its target trajectory can be rather general, and the control parameters can be selected in a rather large range.
The organization of this article is as follows. In section 2, the formulation of the control problem concerned in this paper, some basic concepts and preliminary results are presented. Section 3 is devoted to designing the adaptive controller based on I&I for a kind of time-varying nonlinear system. In section 4, the I&I adaptive tracking controller obtained in section 3 is utilized to trajectory tracking control for a nonholonomic mobile robot. Section 5 presents some numerical simulation results to demonstrate the practical effects of the controlled nonholonomic robot. Some concluding remarks are provided in section 6.
Problem formulation and preliminaries
This article considers the control problem of the following affine time-varying nonlinear system



To find a feasible approach to solve the control problem of system (1), the following preliminary concepts and technical tools should be mentioned for clarity.
Recall that
Two lemmas are provided since they will be used in the sequel of the paper.
(Barbălat) If
For a scalar system
I&I adaptive control of a class of nonlinear systems
Consider the time-varying nonlinear system (1), the assumptions are provided as follows.


(


The assumption (A1) is a basic condition, which just means that the nonlinear system (1) should be controllable, even though it is in general a hard problem for confirming the controllability of the rather general nonlinear systems (1). The controllability of the system (1) is usually judged by using the Chow’s theorem and its relevant corollaries. Chow’s Theorem uses the minimum distribution concept and the controllability Lie algebra condition to analyze the controllability of nonlinear systems. Chow’s theorem asserts that if the controllability Lie algebra is full rank, we can steer this system from any initial point to any final point.30–31
The first part of the assumption (A2) is a classic condition for discussing the stabilization of a time-varying system. The time-varying vector
The assumption (A4) is provided for considering the general cases, where the nonlinear system (1) maybe a nonholonomic or under-actuated system. In particular, for the nonlinear system that could not be linearized to a controllable system by other approaches such as by the aid of differentially flat output feedbacks, or that could not be simplified to other normal forms, such as the feedback or feedforward forms. Then the assumption (A4) provides another approach to analyze the system’s stability with the help of Lemma 1 and Lemma 2.
To establish the adaptive state feedback control law (2) for system (1), following the methodology presented by Astolfi et al.,20–21 let’s define the following “estimation errors”





For the extended dynamic system


Define a function

Considering the assumptions (A2) and (A3), which are



By applying the Young’s inequality
Note that partial state variables of
The introduction of the “regressor”
Even though Theorem 1 is obtained based on several assumptions, which perhaps show certain conservatism, however, in the next section, we will demonstrate that the I&I adaptive control law given by Theorem 1 can be used for trajectory tracking control for a kind of nonholonomic constraint system. In a relatively long time, the first-order nonholonomic constraint systems, such as various kinds of mobile robots, are a class of important verification platforms of various new control laws. To the best knowledge of the authors, it may be the first time in this article that an I&I-based adaptive control law is presented for trajectory tracking control of the first-order nonholonomic constraint systems. What’s more valuable is that, compared with other control methods for the first-order nonholonomic constraint system, the I&I-based adaptive control laws demonstrate certain preferable properties, such as smooth control inputs, exponential convergence and small overshoots for the closed-loop systems, its target trajectory can be rather general, and the control parameters can be selected in a rather large range.
I&I adaptive tracking control of a nonholonomic mobile robot
In order to show the practical feasibility of the adaptive controller (2) for stabilizing a certain class of the time-varying nonlinear system (1), in this section we study the tracking control issues of a crawler-type robot system. Figure 1 illustrates the robot prototype and the corresponding parameterized model.

A crawler mobile robot prototype and its parameterized model.
The velocity kinematics model of the crawler mobile robot illustrated in Figure 1 is given as
By applying the inputs transformation




For the time-varying nonlinear system (23) with



Where


Define the “estimation errors”



Select the adaptive laws as







It is worthy noting that the trajectory tracking controller given by Theorem 2 does not depend on the chained normal form transformation approach, which is an important result presented by Murray et al.
30
for understanding the controllability of the nonholonomic constraint systems, and has been used in many papers11,12,30,33 for different purposes. However, in this paper the errors definition (22) is used for designing the trajectory tracking controller (28), such that the nonlinear coordinate
The close-loop dynamics of the variable
Numerical simulations
Numerical simulations are presented to validate the effectiveness of I&I adaptive tracking controller for the crawler-type mobile robot. In the simulations, the desired trajectory is given by (39), while the control parameters and the initial conditions are shown in Table 1. By applying (28), the responses of system (23) are illustrated in Figures 2–5.


Position responses of the closed-loop system.

Position errors responses of the closed-loop system.
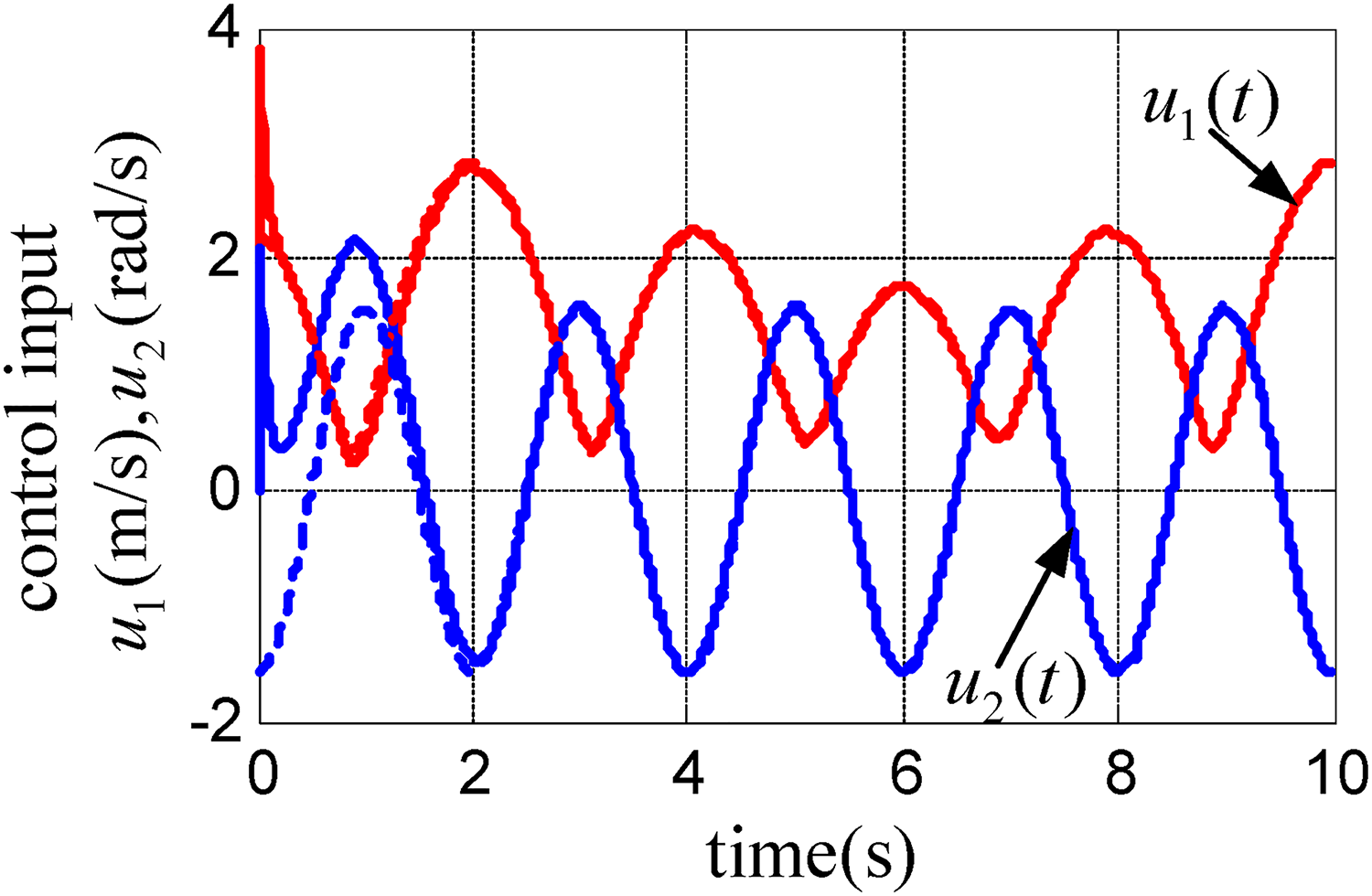
Control inputs the closed-loop system.

Adaptive parameters responses of the closed-loop system.
The control parameters and initial conditions used in the numerical simulations.

Figure 2 illustrates the position responses of the closed-loop system, where the dashed lines represent the desired trajectory while the solid lines represent the actual tracking responses. More clearly, the tracking errors of the state variables are illustrated in Figure 3. Referring to Figure 3 it is shown the position errors reduce to almost zero in 4s under the roughly given control parameters (Table 1). The control inputs of the closed-loop system are also described in Figure 4, where the dashed lines also denote the desired inputs while the solid lines represent the actual inputs. Figure 5 also illustrates the responses of the adaptive parameters
In order to verify the effectiveness of the controller proposed in this paper, we compared it with the controller in,
34
and the response results of the closed-loop system under the comparison controller
34
are shown in Figures 6–7. Figure 6(a) contains

Position responses of the closed-loop system under the comparison method.

Position errors responses of the closed-loop system under the comparison method.
Conclusions
I&I-based adaptive control issues of a class of time-varying nonlinear system are investigated in this paper. It is shown that, under certain additional conditions, the I&I-based adaptive control method can be utilized to stabilize a class of time-varying nonlinear system. More interesting, it is also shown the presented adaptive controller can be used for trajectory tracking control of a class of nonholonomic constraint system.
It is different from the traditionally standard adaptive control, where the adaptive law is generally used to dominate the estimation errors of the unknown structure parameters of a controlled plant. However, the I&I-based adaptive control method proposed in this paper is used to increase the design flexibility of the control inputs. By constructing an auxiliary “regressor”, we have shown that the adaptive law can influence the developments of the state variables of the nonlinear systems, such that partial state variables of a time-varying nonlinear system could be implicitly stabilized by following the trajectory of other state variables. Our future work will focus on the I&I-based adaptive control method of a class of nonholonomic constraint system with disturbances or unmodelled terms.
Footnotes
Acknowledgements
This work was supported in part by the National Key R&D Program of China under Grant 2019YFB1309603, in part by the Natural Science Foundation of China under Grant 62003005, and Grant 62103007, in part by Beijing Natural Science Foundation under Grant L202020, in part by the R&D Program of Beijing Municipal Education Commission under Grant KM202110009009, Grant KZ202010009015, and Grant KM202210009010, in part by China Postdoctoral Science Foundation under Grant 2021M693404, in part by the Yuyou Talent Support Project of North China University of Technology, in part by the Fundamental Research Funds for Beijing Municipal Universities.
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This work was supported in part by the National Key R&D Program of China under Grant 2019YFB1309603, in part by the Natural Science Foundation of China under Grant 62003005, and Grant 62103007, in part by Beijing Natural Science Foundation under Grant L202020, in part by the R&D Program of Beijing Municipal Education Commission under Grant KM202110009009, Grant KZ202010009015, and Grant KM202210009010, in part by China Postdoctoral Science Foundation under Grant 2021M693404, in part by the Yuyou Talent Support Project of North China University of Technology, in part by the Fundamental Research Funds for Beijing Municipal Universities.
Author biographies
Xu Liang received the B.S. degree in automation from Central South University, Changsha, China, in 2013, and the Ph.D. degree in control theory and control engineering from Institute of Automation, Chinese Academy of Sciences, Beijing, China, in 2020. He is currently with the North China University of Technology, Beijing, China. His research interests include human-machine interface, interaction control, and intelligent systems.
Tingting Su received the B.S. degree in automation from Central South University, Changsha, China, in 2013, and the Ph.D. degree in control theory and control engineering from the Institute of Automation, Chinese Academy of Sciences, Beijing, China, in 2018. She is currently with North China University of Technology, Beijing, China. Her current research interests include trajectory planning, robotics, and intelligent control systems.
Shengda Liu received the B.S. degree with the major of mathematics from Harbin Normal University, Harbin, China, in 2012, and the M.S. and Ph.D. degrees with the major of applied mathematics from Guizhou University, Guiyang, China, in 2016 and 2019, respectively. He is currently a post-doctoral fellow at the State Key Laboratory of Management and Control for Complex Systems, Institute of Automation, Chinese Academy of Sciences. His current research interests include iterative learning control, fractional order equation and control theory, human-robot interaction and its application in rehabilitation robots.
Guangping He received the B.S., M.S., and Ph.D. degrees in mechanical and electrical engineering from the Beihang University of China, Beijing, China, in 1994, 1997, and 2002, respectively. From 1997 to 2002, he was with Launch Vehicle Technology Academy of China, Beijing. From 2007 to 2008, he was a post-doctoral fellow with the Department of Mechanics and Engineering Science, Peking University, Beijing, China. Since 2002, he has been with North China University of Technology, Beijing, China. His current research interests include dynamics and control of robots and micro-electromechanical devices.