
Abstract
The half-car suspension has the coupling of pitch angle and front and rear suspension. Especially when the suspension model has a series of uncertainties, the traditional linear control method is difficult to be applied to the half-car suspension model. At present, there is no systematic method to solve the suspension power. According to the energy storage characteristics of the elastic components of the suspension, the power calculation formula is proposed in this paper. This paper proposes a composite adaptive backstepping control scheme for the half-car active suspension systems. In this method, the correlation information between the output error and the parameter estimation error is used to construct the adaptive law. According to the energy storage characteristics of the elastic components of the suspension, the power calculation formula is introduced. The compound adaptive law and the ordinary adaptive law have good disturbance suppression, both of which can solve the pitching angle problem of the semi-car suspension, but the algorithm of the compound adaptive law is superior in effect. In terms of vehicle comfort, the algorithm of the general adaptive law can achieve stability quickly, but compared with the composite adaptive law, its peak value and jitter are higher, while the algorithm of the composite adaptive law is relatively gentle and has better adaptability to human body. In terms of vehicle handling, both control algorithms can maintain driving safety under road excitation, and the compound adaptive algorithm appears to have more advantages. Compared with the traditional adaptive algorithm, the power consumption of the composite adaptive algorithm is relatively lower than that of the former in the whole process. The simulation results show that the ride comfort, operating stability and safety of the vehicle can be effectively improved by the composite adaptive backstepping controller, and the composite adaptive algorithm is more energy-saving than the conventional adaptive algorithm based on projection operator.
Introduction
The suspension system has a significant influence on the vehicle ride comfort and handling stability. Compared with the traditional automobile suspension system, the active suspension system has great advantages. 1 For example, the vibration between the body and the irregular road surface can be more effectively isolated by the active suspension system. A quarter of the model is very effective in verifying the superiority of the control algorithm. 2 In order to solve the problem of the pitch angle of the suspension and the vertical displacement of the body, the half-car suspension model is adopted in this paper, and the properties of the nonlinear suspension components are taken into account. But the half-car suspension has the coupling of pitch angle and front and rear suspension, which is more difficult than the quarter suspension system in the control algorithm design. Especially, due to the suspension model has a series of uncertainties, the traditional linear control method is difficult to be applied to the half-car suspension model. Therefore, adaptive backstepping control algorithm is adopted to solve the above problems.
The adaptive algorithm has some adaptabilities in the estimation of uncertainties.3,4 And according to the change of parameters, this algorithm can automatically maintain the stable operation of the system. Adaptive control is widely used in active suspension system because of its superiority in solving uncertainties.5,6 An adaptive control strategy suitable for the CVD skyhook control of the whole vehicle with seven degrees of freedom was proposed by Amin et al., which solved the problems of vehicle ride comfort and safety under different driving modes. 7 Na et al., 8 a new adaptive control algorithm was designed to stabilize the vertical displacement of the vehicle and improve ride comfort. In addition, other suspension requirements related to vehicle safety and mechanical constraints (such as road retention and suspension space limitations) are considered in this paper. The backstepping control is very effective in solving nonlinear problems. this algorithm has strong fusion and can be effectively combined with other algorithms. Chávez-Conde et al., 9 this control algorithm is combined with integral sliding mode control to solve a series of nonlinear characteristics caused by suspension under the road disturbance. In response to the disturbance and uncertainty of suspension on different roads, Basturk 10 proposed an adaptive backstepping control to improve the comfort of the vehicle. But with the promotion of energy conservation, the current adaptive law has been difficult to meet the growing needs of people. In this paper, the conventional adaptive control method with projection algorithm is improved, and a composite adaptive control method is proposed to solve the pitch angle of the half-car suspension and the vertical displacement of the vehicle body. This method is combined with backstepping control to ensure the travel and safety of suspension. At present, there is no systematic method to calculate the suspension power, and the evaluation index of suspension energy consumption is still in a blank state. According to the energy storage characteristics of the elastic components of the suspension, the power calculation formula is proposed in this paper.
Problem formation
In order to solve the problem of the pitch angle of the suspension and the vertical displacement of the body, the half-car suspension model is adopted in this paper.
According to the active suspension structure diagram in Figure 1, the equations of motion of the half-car active suspension model can be described as follows 11 :

where,






Then, the above equations are constrained as follows:





Half-car active suspension structure drawing. 12
In the above formulas,


where,
To proceed further, the following variables are defined:

Then,

Influenced by the original suspension structure and materials, the corresponding


Due to the influence of its structure, the controller will be overloaded in the process of working. This may result in the original control effect is not as expected, so it is necessary to constrain the amplitude of the controller. The amplitude is set as follows:

The next step is to design the controller


where,
Composite adaptive backstepping control
According to formula (8), the formula of the first subsystem is as follows:

where,
The tracking error is set as

And the corresponding error of

where,
Then the formula (15) can be further written as:

Lyapunov function is selected as:

In order to stabilize the formula (15), the desired virtual control

The

As we can see from the above formula, if
The derivative of the error dynamic

The control law

Where,
Design of conventional adaptive law
The conventional adaptive law is designed as:


where,

The adaptive law has the following two properties:
It is guaranteed that the estimated

Guarantee that the following conditions are true:

Design of compound adaptive law
In order to make the online estimation

Set
where,
For any matrices A and Q, the following formula is true:

The following Lyapunov function is selected:

The derivative of the above formula can be obtained:

According to lemma 1:

We know from the definition of

Since

The following inequalities can be obtained by integrating both sides of A from

Therefore, we can conclude that

From the above equation, it can be further obtained that:


The formula (38) and subsequent steps show that all signals of the system are bounded. Therefore, the following formula is established:

So

which is equal to C is bounded, so
At this point, the design of controller
Set


If



Then the error dynamic equation of pitching motion is stable. The


where,


Finally, according to


The next part is the proof of zero dynamic stability.
Stability proof
The above-mentioned discussion devotes to controller design for a fourth-order error system, while the whole is an eight-order system, a zero-dynamic analysis is required.
13
According to the requirement of zero dynamics, we set


Through the above controller form, we can obtain:


According to (54) and (55), the zero dynamic equation can be obtained:

where,
The Lyapunov function is defined as follows:

Then,

Since the eigenvalues of


where

Select appropriate parameters to obtain:

Define


The above expressions indicate that the function V is bounded, namely:

The next part is to estimate the bounds of suspension parameters:






After adjustment:


then,


Similarly, it can be concluded that:




The adjustable gains can be adjusted to:


So,

Solution of active suspension power
Nowadays, the performance evaluation of automobile suspension has been quite mature. 14 Compared with ordinary suspension, it has great advantages in improving passenger riding comfort, driving maneuverability and driving stability. 15 But in the process of driving, compared with other suspension systems, the active suspension system consumes more energy. At present, most literatures focus on the research of energy-fed suspension and adopt different control methods for the energy saving of the suspension. In the aspect of energy saving, there are some researchers on the study. Kou et al. 16 proposed a coordinated control strategy using linear motor to control active suspension energy management, which improved the efficiency of energy regeneration, reduced the energy consumption of the suspension, and improved the performance of the suspension to a certain extent. Zhang et al. 17 designed a new suspension mechanism, which is a hydro-electric power regeneration structure of automobile. It can ensure the recovery and utilization of energy in the process of driving on steep roads, and it has been proved in the experiment that the modified device has strong ability in energy recovery. However, there is no systematic method to solve the suspension power. For example, the evaluation index of suspension energy consumption is still in a blank state. How to develop a new energy consumption evaluation method is of great practical significance for the promotion of active suspension.
At present, the expressions for solving power are generally divided into the following three situations: (1) Consider the internal structure of the actuator structure and the influence of internal liquid flow. (2) Consider power analysis in the time domain. (3) The structure of the actuator is not considered in the calculation process, and the loss of the suspension’s average working energy during the whole movement is mainly considered. However, the above three methods have different limitations according to different situations. If the internal structure of the actuator and the influence of internal liquid flow are considered, the power expression is:

where,
If the power problem is analyzed in the time domain and the average velocity of the liquid is obtained by standard deviation, the power formula can be written in the following form:

This formula has the same meaning as the letters above, except that
In the process of analyzing the suspension in this paper, since the structure of the actuator is not considered in the study, in the process of vibration analysis, we pay more attention to the average value method to calculate the power.
According to the characteristics of the active suspension and the energy storage property of the elastic element, the following parameters are introduced as follows:

where,
Then the front and rear power of the suspension are:


The change of energy consumed in


Since



Simulation
The parameters of the half active suspension model are selected as follows:
The road surface disturbance is set as:

The simulation structures are shown in Figures 2 to 16.

Vertical displacement response.

Vertical acceleration response.

Angular displacement response.

Angular acceleration response.

Unsprung mass displacement response
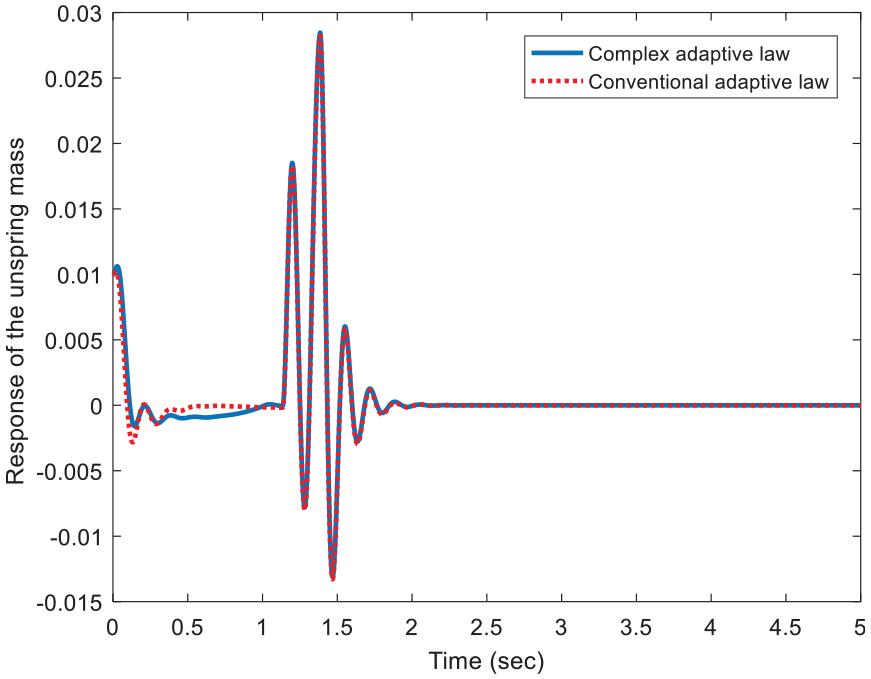
Unsprung mass displacement response

Front suspension travel.

Rear suspension travel.
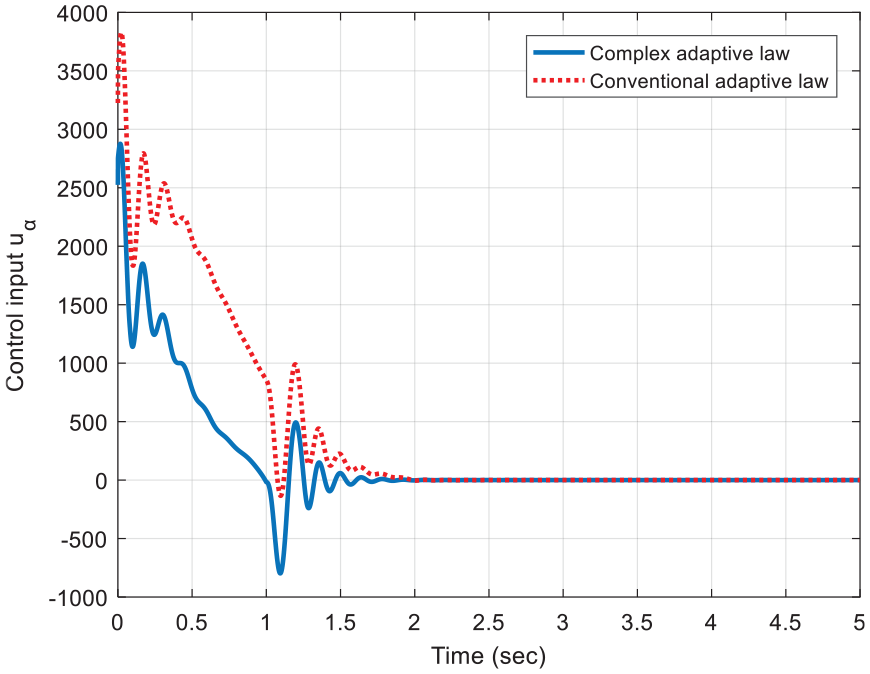
Control input

Control input
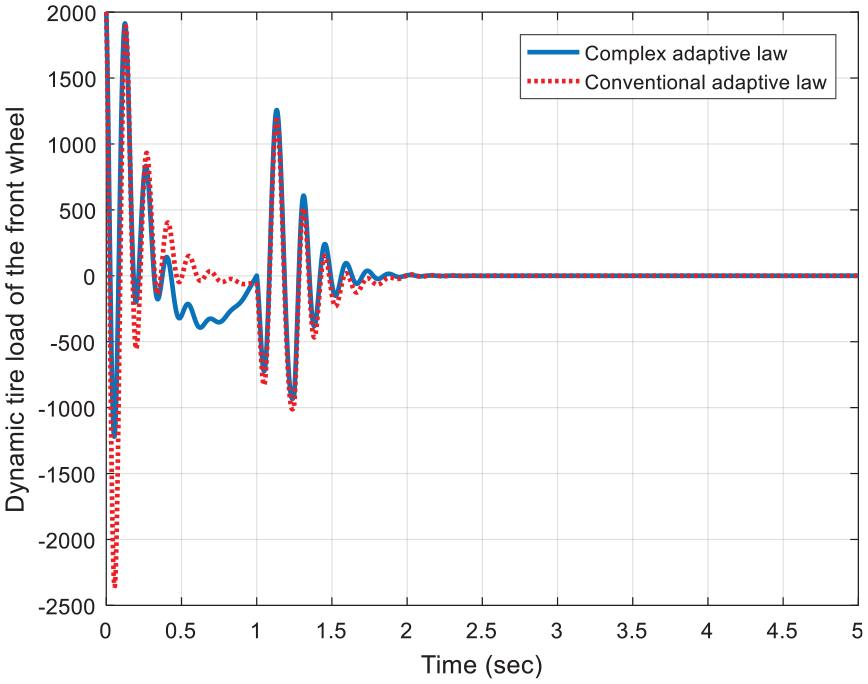
Dynamic tire load on the front wheel.

Dynamic tire load on the rear wheel.

The tracking error

The tracking error
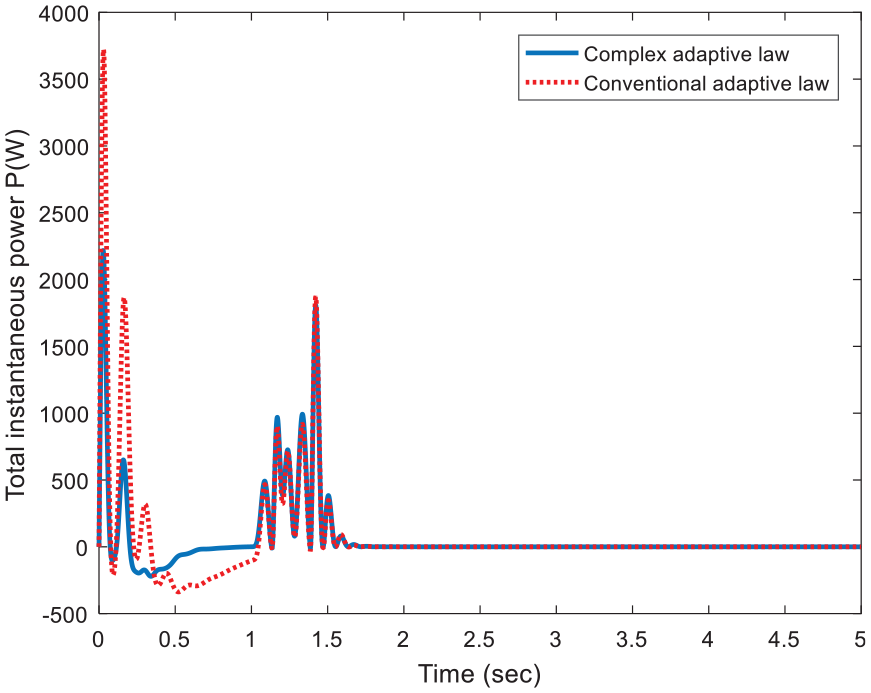
Instantaneous power consumption.
Figure 3 shows that both the composite adaptive algorithm and the ordinary adaptive algorithm have achieved the effect of controlling the vertical displacement response. However, the fluctuation of the passive suspension in the whole process is too large.
The existence of pitch angle will cause the coupling of front and rear suspension, increase the influence of uncertainty and nonlinearity on the whole system, and then affect the performance of semi-car suspension. Figures 4 and 5 respectively show that both the compound adaptive law and the ordinary adaptive law have good disturbance suppression, both of which can solve the pitching angle problem of the semi-car suspension, but the algorithm of the compound adaptive law is superior in effect. However, the relatively passive suspension is difficult to achieve fast stability in the whole process. In Figure 4, stability is achieved after 3 s, while in Figure 5, stability is achieved after 2.3 s, which has obvious disadvantages compared with the two adaptive control methods. Figure 5 shows that both algorithms can improve the ride comfort of vehicles. The algorithm of the general adaptive law can achieve stability quickly, but compared with the composite adaptive law, its peak value and jitter are higher, while the algorithm of the composite adaptive law is relatively gentle and has better adaptability to human body. Compared with the above two algorithms, the vibration of the passive suspension in the whole process is relatively large, and it tends to be gentle at 4.3 s, and the comfort is relatively poor. Figures 6 and 7 show the response of unsprung mass displacement. In contrast, the peak value of the compound adaptive law algorithm in the stabilization process is relatively low.
The dynamic travel of suspension affects the life of automobile suspension. One of the objectives of the controller is to stabilize the value of the data within its maximum limit, so as to avoid irreversible mechanical damage caused by exceeding the value. The suspension travel response has a direct impact on the above safety problems. Figures 8 and 9 show the forward and backward travel of the suspension. Compared with the ordinary adaptive algorithm, the composite adaptive algorithm can quickly achieve stability, and its peak value and jitter degree are relatively low and relatively gentle, which can reduce the probability of component damage. Figures 10 and 11 show the control input, indicating that both algorithms can achieve their corresponding control expectations, while the composite adaptive algorithm has a lower peak value and more advantages in terms of energy consumption.
The stability of handling directly affects the safety of driving, which to some extent reflects the contact between automobile tires and road surface. This indicator represents the maneuverability of the vehicle. Figures 12 and 13 show tire load. According to the above graph, both control algorithms can maintain driving safety under road excitation, and the compound adaptive algorithm appears to have more advantages. Figures 14 and 15 show the tracking error, indicating that the dynamic equation can converge in a finite time. Figure 16 shows the instantaneous power consumption. Because spring components have the characteristics of energy storage, they generate energy during the release process, so the power will generate negative values. Compared with the traditional adaptive algorithm, the power consumption of the composite adaptive algorithm is relatively lower than that of the former in the whole process. In addition, when releasing energy, the process of releasing energy of this algorithm is relatively gentle, without the drastic energy release of ordinary adaptive control algorithm. Therefore, compared with the former compound adaptive algorithm, it has more advantages in energy saving.
Conclusion
This paper proposes a composite adaptive backstepping control scheme for the half-car active suspension systems. In order to improve the convergence of the adaptive algorithm, the compound adaptive law is introduced. And the corresponding adaptive backstepping controller is designed. The simulation results show that the ride comfort, operating stability and safety of the vehicle can be effectively improved by the composite adaptive backstepping controller. According to the energy storage characteristics of the elastic components of the suspension, the power calculation formula is introduced. The simulation results show that the composite adaptive algorithm is more energy-saving than the conventional adaptive algorithm based on projection operator.
This algorithm improves the disadvantage of the traditional adaptive rate and lays a foundation for the design of energy saving controller in the future. How to design a control algorithm focusing on energy saving is my future research direction.
Footnotes
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) received no financial support for the research, authorship, and/or publication of this article.