
Abstract
To achieve a high performance synchronized motion trajectory tracking of the hydraulic press slider-leveling electrohydraulic control system, an adaptive robust cross-coupling control strategy that incorporates the cross-coupling approach into adaptive robust control (ARC) architecture has been proposed. The primary objective of this study was describe that the nonlinear ARC controller together with a cross-coupling control (CCC) controller was integrated to solve the slider-leveling synchronization control system using four axes. A discontinuous projection-based ARC controller was constructed. A robust control method with dynamic compensation type fast adaptation was introduced to attenuate the effects of parameter estimation errors, unmodeled dynamics and disturbances, and improved the transient tracking performance of the system. The stability of the controller was proven by Lyapunov theory and the trajectory tracking error asymptotically convergences to zero. The simulation of a desired reference trajectory was included. The max tracking error of the proposed ARC controller of single axis was kept within—0.06 mm. The trajectory tracking error asymptotically converges to zero, which guaranteed the system would possess good transient behavior and confirmed the stability performance of the control system. The four axes synchronous errors of reference trajectory with cross-coupling controller indicated the maximum synchronization error of the proposed ARC + CCC controller between axis was within ±0.1 mm. The ARC together with a CCC controller for four hydraulic cylinders used parameter adaptation to obtain estimates of model parameters for reducing the extent of parametric uncertainties, and used a robust control law to attenuate the effects of parameter estimation errors, unmodeled dynamics, and disturbances. This study result shows that the proposed cross-coupling synchronization control scheme, together with the ARC law, provides excellent synchronization motion performance in a control system with four axes.
Keywords
Introduction
As an efficient machine tool, hydraulic press is widely used in various kinds of industrial production and plays a strategic role in national economic development. 1 With the rapid development of modern industry, the tonnage of hydraulic press and working surface is now getting bigger, the precision of part is getting higher and the shape is getting complicated. However, due to limitations of hydraulic equipment structure, uneven force and/or other factors to the work bed, the slider action is often affected by the off-center loading in the actual work process. The off-center loading of hydraulic press is due to the geometry of the part not being conducive to an even load. Many applications do not apply the load evenly over the slider and can wreak havoc on the press structure and tooling. Hydraulic presses, especially those with large slider and/or small tooling, can also be improperly loaded due to operator error, creating additional alignment problems.2,3 Therefore, it is necessary to equip hydraulic press with synchronization control to prevent slider from off-center loading, thus ensuring motion accuracy of the slider, which also improve loading status and extend the service life of the hydraulic press. To research and design synchronization electrohydraulic control system of hydraulic press, the paper has proposed adaptive robust cross-coupling position synchronization control method which can be integrated into a hydraulic press to increase part quality, reduce die wear, and reduce complex setup time. This provides the ideal solution for manufacturers who need to counteract the effects off-center loading, significant breakthrough shock, and reverse shock loading situations.
The hydraulic press slider-leveling electrohydraulic control system (HPSECS) which belongs to a typical four axes synchronization control system is a key component of high-precision hydraulic press. As a typical multi-axis synchronous control technology, synchronization motion control has always been the focus of the scholars at home and abroad research. Many control algorithms, for example, PID control,4–6 disturbance observer, 7 decoupling control,8,9 adaptive control,10,11 and the sliding mode control12–14 are applied to the multi-axis synchronous control of electrohydraulic system. Synchronous control method which is based on the equivalent mode or master-slave mode, can obtain a satisfactory performance on some occasions. The HPSECS belongs to the typical four axes synchronous control system. When any one axis suffers from strong nonlinearities and external disturbances synchronous precision immediately becomes poor so as to inaccurately track the motion trajectory. An exact system model is difficult to be satisfied for the HPSECS because of the existing two uncertainties. One is parametric uncertainties, for example, bulk modulus, square root relationship between pressure and flow, temperature and pressure dependent oil properties and friction, the other is uncertain nonlinearities, for example, friction and external disturbances. 15 Hence, in order to attain high precision motion trajectory tracking performance, many advanced control strategies have been applied. Ullah et al. 16 and Asghar and Ullah 17 has proposed fractional and integer order controllers, which are effective approaches that can be used to solve systems with parametric uncertainties and external disturbances. Yao has developed adaptive robust control (ARC) theory, combined with both adaptive control and robust control (such as sliding mode control), that can simultaneously solve systems with parameter uncertainties and uncertain nonlinearities.18–21
Although the parameter estimation may hardly converge to their true values when the persistent exciting condition is not satisfied, the output tracking performance is guaranteed in terms of final tracking accuracy. Owing to the motion of hydraulic press slider is the instantaneous dynamic leveling system, the fast dynamic compensations are employed to ensure the transient tracking performance which may achieve better transient performance. The effectiveness of the approach has been verified in many literatures, for example, single-rod hydraulic actuators, hydraulic robotics arm, the control of pneumatic muscles driven parallel manipulators and pneumatic cylinders, etc.22–25
To achieve a high performance synchronized motion trajectory tracking of the HPSECS, an adaptive robust cross-coupling control strategy that incorporates the cross-coupling approach into ARC architecture has been proposed.14,26,27,28–31 The current study establishes a mathematical model of HPSECS. ARC theory is based on a backstepping method that was designed for the HPSECS. The proposed controller guarantees robustness, transient performance and steady-state tracking accuracy. In the process of designing the controller, two Lyapunov functions were adopted to prove asymptotic convergence to zero of position tracking errors.
The rest of this paper is organized as follows. The second section describes problem formulation and dynamic models. The third section presents the proposed controller integrated ARC with cross-coupling controller. The fourth section presents the simulation setup and results. The final section draws conclusions.
Problem formulation and dynamic models
In the HPSECS, four hydraulic cylinders with same structure were set under the four corners of the base bolster of the hydraulic press. And four high-precision displacement sensors were also placed on the four hydraulic cylinders. Only in the procedure of clamping need the hydraulic cylinder to be in contact with the slider, and followed downward. If the slider deflected under partial load torque, the controller obeys the control algorithm and controls the opening of the HSPV, which is the backpressure of the piston-side chamber of the hydraulic cylinder. Oil of the piston-side chamber goes back to the tank by the opening of the HSPV. 6 Four hydraulic cylinders control the accuracy of the slider, and simultaneously, parallelism should be guaranteed under the condition of four axes synchronous control. The hydraulic principle of the HPSECS is shown in Figure 1.

Schematic diagram of the hydraulic press slider-leveling electro-hydraulic control system. (1) Hydraulic actuators; (2) displacement sensors; (3) pressure sensors; (4) high-response servo proportional valves; (5) safety valves; (6) check valves.
The load force balance equation of the ith cylinder (i = 1–4) can be described

where
By neglecting both the internal and external leakage, the pressure dynamics can be expressed

The internal volume of the piston-side chamber of the cylinder may be written

where
The flow through the cylinder related to the high-response servo proportional valve (HSPV) can be described

Now, by definition

where
Define

in which

Define the unknown parameter set

in which

where
The extent of parametric uncertainties and uncertain nonlinearities in equation (8) are known as

where
Let

For the present analysis, a discontinuous projection mapping-based adaptation law was chosen. Here,
This simple discontinuous projection mapping has the form as

Under this projection mapping, the adaptation law is defined by

where
This adaptation law used in equation (13) guarantees the conditions bound as shown in equation (14)

Define the motion trajectory tracking error vector of the ith cylinder

where
In the synchronized motion, in addition to

Define synchronization errors of a subset of all possible pairs of the axis from the total of four axes in the following way 32

where
Four sub-goals such as

Obviously, if
Adaptive robust cross-coupling controller design
Step 1. Define a switching function-like quantity as

where

Let

where
Substituting (21) to (20),

Let

where
The low-frequency component

where

with
Substituting equations (23) and (24) into equation (22),

Define a positive semi-definite Lyapunov function

where
Substituting equation (26) into equation (27) gives

The following condition is now chosen to satisfy the robust control function

The adaptation tuning function

where
Step 2. Step 2 requires synthesizing a virtual control function such as

According to equations (8) and (21), one obtains

in which

In equation (33), the calculable part is
Define a positive semi-definite Lyapunov function as

Differentiating equation (34) and noting equation (28), one obtains

where
Noting equations (31) and (35),

Defining

Substituting equation (37) into equation (36), we see that equation (36) is rewritten into

Let

As in Step 1, the fast dynamic compensation term

where

with

Similarly,

The following ARC control law,

where
The adaptation tuning function

where
The system adaptation function,

Substituting the first inequation of equation (44) into equation (43), one obtains

Theorem 1: According to equation (8), if the control law satisfied with equation (10) is synthesized as equation (44) and with the adaptation law given by equation (13), the following conclusions can be obtained
I. The tracking error

in which

II. If after a finite time
Remark: Result I of Theorem 1 indicates that the final tracking errors will be a bounded by
Cross-coupling controller design
Figure 2 presents a cross-coupling control (CCC) block diagram based on an ARC approach. The cross-coupling approach based the adaptive robust motion controller makes the trajectory tracking error


Block diagram based on adaptive robust cross-coupling approach.
Simulation setup and parameter settings
Simulation setup
MATLAB/Simulink was used and was based on the model illustrated in equation (8), whose structure is shown in Figure 3. The HPSECS’s control algorithm is carried out on the Simulink/AMESim co-simulation platform. The hydraulic press photograph is shown in Figure 4. The HPSECS is mainly composed of a frame, a return cylinder, two master cylinders, four leveling hydraulic cylinders and a base bolster. In the test rig, the leveling actuators with the dimensions of 140 mm × 100 mm × 100 mm were controlled by four HSPVs (REXROTH: 4WRREH6VB40L-1X/G24K0/B5M), had a bandwidth above 80 Hz with a ±100% control signal. The system state variables used in the controller, including actuator’s displacement

Block diagram of the hydraulic press slider-leveling electro-hydraulic control system.
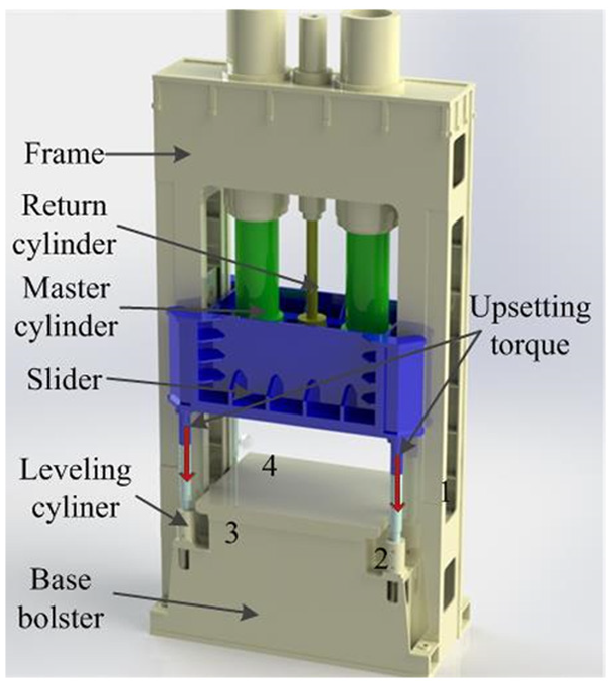
Photograph of hydraulic press.
Parameter settings
The essential parameters of the HPSECS simulations are given in Table 1. The values of the essential parameters come from design, measurements, testes and the literature.
Values of essential parameters (i = 1–4).

The uncertain parameters of the HPSECS simulations are given in Table 2. To illustrate the discrepancy of synchronization errors between the ARC controller with CCC controller, the ARC controller parameters of the reference trajectory for four axes are given in Tables 3. The CCC controller parameters are given in Table 4.
Extent of uncertain parameters (i = 1–4).

Values of controller parameters (i = 1–4).

Values of cross-coupling control controller parameter (i = 1–4).

Results and discussion
In the process of the simulation, a desired reference trajectory is shown in Figure 5. The max tracking error of the proposed ARC controller of single axis was kept within—0.06 mm in Figure 6. System parameter adaptive estimation curves are shown in Figure 7, which caused the controller to deal with parametric uncertainty. The four axes synchronous errors of reference trajectory with cross-coupling controller is shown in Figure 8, which indicates the maximum synchronization error of the proposed ARC + CCC controller between axis was within ±0.1 mm. Figure 8 shows the contact between the slider and the leveling hydraulic cylinder which results in a collision impact at t = 0.2 s.
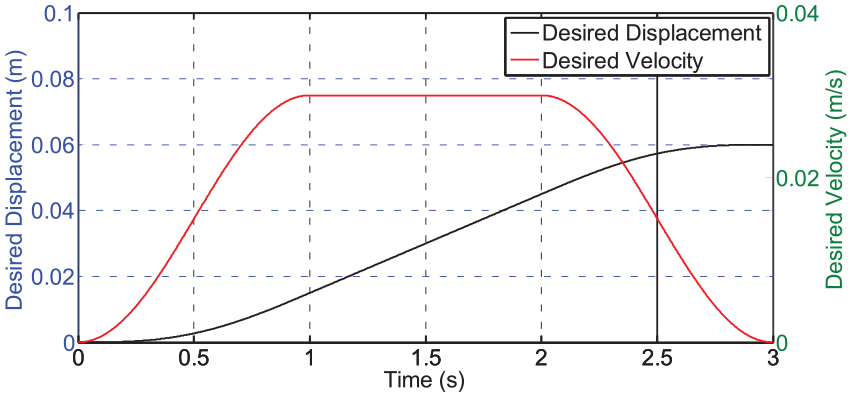
Reference trajectory.

Position error of HPSECS with single axis.

Parameter estimations of axis controller.

Synchronization errors with ARC + CCC.
Conclusion
In this paper, a detailed control model that was constructed to describe the HPSECS and an adaptive robust cross-coupling position synchronization control strategy for four axes was presented. The ARC controller used parameter adaptation to obtain estimates of model parameters for reducing the extent of parametric uncertainties, and used a robust control law to attenuate the effects of parameter estimation errors, unmodeled dynamics, and disturbances. A synchronization algorithm based on ARC together with a CCC controller for four hydraulic cylinders was proposed. The trajectory tracking error asymptotically converges to zero, which guaranteed the system would possess good transient behavior and confirmed the stability performance of the control system. The stability of the controller designed was verified through Lyapunov’s theory. The ARC controller of four axes electro-hydraulic control system solved the parameter uncertainties and uncertain nonlinearities problems. The four axes synchronous control systems integrated the ARC algorithm with the CCC approach for motion control could achieve excellent synchronization performance.
Footnotes
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This work was supported by the Introduced Talents Foundation of Kunming University of Science and Technology (No. KKSY201901014).