
Abstract
In this article, a weighted multiple model adaptive boundary control scheme is proposed for a flexible manipulator with unknown large parameter uncertainties. First, the uncertainties are approximatively covered by a finite number of constant models. Second, based on Euler–Bernoulli beam theory and Hamilton principle, the distributed parameter model of the flexible manipulator is constructed in terms of partial differential equation for each local constant model. Correspondingly, local boundary controllers are designed to control the manipulator movement and suppress its vibration for each partial differential equation model, which are based on Lyapunov stability theory. Then, a novel weighted multiple model adaptive control strategy is developed based on an improved weighting algorithm. The stability of the overall closed-loop system is ensured by virtual equivalent system theory. Finally, numerical simulations are provided to illustrate the feasibility and effectiveness of the proposed control strategy.
Keywords
Introduction
Robotic manipulators are widely used in dangerous, heavy, repetitive, and other tasks. Traditional rigid manipulators are realized by heavy materials with strong stiffness. 1 They do not have the problem of flexible deformations, so it is relatively easy to obtain good angular position tracking performance. Since a lot of energy is consumed due to slowly moving and large weight, there is a contradiction between high speed and high accuracy, which is a challenging problem in the literature. However, flexible manipulators are concerned by engineers and scholars which possess various advantages, such as fast response time, light weight, high efficiency, and low energy consumption. And, they have been widely used in micro-surgical operation, 1 robots,2,3 mechanical industry, 4 and so on.
Accurate modeling plays an important role in designing a feasible control system. Flexible manipulator is a complicated nonlinear system, whose dynamic model has strongly rigid-flexible coupling characteristic. 5 In the past decades, there have been many research results of dynamic modeling for flexible manipulators. Generally, bending and shear deflections both exist in each flexible link, which is regarded as Timoshenko beam. Considering that the link length is much larger than the section size, shear deflection can be ignored, then it can be considered as Euler–Bernoulli beam. 4 Some modeling techniques have been proposed, such as the finite element method, the assumed mode method, and the lumped parameter method.4,6 A computationally efficient modeling method using acceleration-based discrete-time transfer matrix is presented for the dynamics analysis of flexible manipulators in Zhang et al. 6 Besides, the global mode method is proposed to analyze dynamic model in Wei et al. 7 However, there are two serious issues in the above different discretization modeling techniques. One is that the order of the controller increases with the number of modes, and the other is that the ignored high frequency modes lead to spillover effect in the controller. 4 To solve these issues, partial differential equation (PDE) model is chosen to design the controller, which can reflect the dynamic characteristics of flexible structure accurately.8,9
Note that the flexible structures of flexible manipulators are apt to cause vibrations of links, which even affects the precision of kinematics. Vibration control methods of flexible manipulator mainly includes passive control and active control.
10
The passive control methods are to increase structural damping by installing high damping material, which are not effective for low frequency vibration. Many scholars tend to study active control strategies. In Benosman and Vey,
11
a survey has been given on a variety of control methods, including PD control, adaptive control, singular perturbations, and sliding mode control (SMC). Besides, model-based evolution of a hybrid fuzzy adaptive control,
12
predictive control,
13
As for the previous researches, the control methods deal with the parameter uncertainties of the flexible manipulators based on their robustness or limited self-adaptability, which cannot adapt to the large parameter variations. However, in practical applications, the influences of changeable working environments on the plant cannot be ignored, such as terrestrial, underwater, high and low temperature environments, which will cause large uncertainties of system parameters. However, during the processes of performing some tasks, several system parameters will be changed in a large range, such that the existing controllers cannot guarantee the stability of the system. As for the conventional adaptive control methods, if the initial values of the identification algorithms are far away from the real values of system parameters, they will be restricted by the convergence speed, which makes it difficult to obtain satisfactory transient performance. 33 To solve these issues, an improved weighted multiple model adaptive control (WMMAC) is used to deal with the large uncertainties of system parameters. Benefits from multiple models and controllers in parallel, a more reasonable controller, is used to control the current plant when the system parameters vary largely. Compared with the single controller or other methods, the control performance of the system will be improved obviously. If the parameter estimation of conventional adaptive control can be regard as infinite model identification, multiple model adaptive control can be considered as a finite model identification method, which makes it fast to identify system parameters, especially for dynamic system with large parameter uncertainties. In order to improve the parameter identification speed further, the classical weighting algorithm of WMMAC is replaced by a simple algorithm to reduce the calculation burden. Briefly, the proposed weighted multiple model adaptive boundary control (WMMABC) combined boundary control and WMMAC is designed for the large parameter uncertainties of a flexible manipulator, and the existing other methods cannot solve the problem effectively.
This article focuses on the accurate position tracking and vibration suppression of a flexible manipulator with large uncertainties of system parameters. First, the large variation ranges of system parameters are approximatively divided into several parts with constant parameters. For every part, a local mathematical model for the flexible manipulator is established without complicated process of mechanical analysis, based on Euler–Bernoulli beam theory and Hamilton principle. Second, a model-based boundary control is designed to ensure that the closed-loop system is stable corresponding to the local model, which works on the motor axis and terminal payload. Then, the WMMABC is developed to solve the issue of large uncertainties through coordinating the local boundary controllers using a novel weighting algorithm. Finally, the overall closed-loop stability is proved based on virtual equivalent system (VES) methodology.
The main contributions of this article are summarized as follows:
A WMMABC method is developed to control the flexible manipulator with large uncertainties of system parameters, to the best of our knowledge, which is unrealizable by the existing controllers;
By improving the performance index of weighting algorithm, a suitable WMMAC is designed for both position tracking and vibration suppression of the flexible manipulator.
The rest of the article is organized as follows. Section “System description” presents the preliminaries and problem statement. Based on the Lyapunov stability theory, the local boundary controller is designed corresponding to the local constant model in section “Model-based boundary control.” In section “WMMABC,” the WMMAC is introduced into the controller and the stability proof of the overall closed-loop system is given. Then, simulations are carried out for a flexible manipulator with large parameter uncertainties in section “Numerical simulation.” Finally, the conclusion and future works are drawn in section “Conclusion.”
System description
In this article, a single-link flexible manipulator that moves in the horizontal direction is considered. Some assumptions based on Euler–Bernoulli beam theory are presented as follows, which lay the foundation for the subsequent analysis and design of control scheme.
Assumption 1
As the link considered is a prolate thin beam, whose length is much larger than the cross-section size, the deformation in the horizontal direction is much more serious than the axial deformation in general, such that the axial deformation can be ignored and transverse vibration is concerned only.
Assumption 2
Compared to the flexible link, the size of tip payload is too small, which is very common in the flexible robotics industry. Thus, the tip payload can be regarded as one particle.
Assumption 3
In view of the flexible manipulator material technology, there are constant cross-sectional area and uniform material properties in every part of the link, which can be realized almost perfectly. Even if there are small differences, the impact on the system can be temporarily ignored.
Assumption 4
The clamping device is much less flexible than the link, such that it can be regard as a central rigid body.
The flexible manipulator system is described in Figure 1. The XOY is the inertia coordinate system and the

Structural model of flexible manipulator with tip payload.
Remark 1
The flexible manipulator parameters are variable with respect to time t.
Remark 2
In order to express the analysis process succinctly, the time t is omitted in the function variables, and notations
First, it is assumed that the system parameters are constant at a certain moment, which is to deal with the changes of system parameters by time discretization. Then, the constant parameters can be used to analyze the local mathematical model.
As the elastic deformation of the origin is 0 at any time, that is

One point

where
Then

The Hamilton principle is a modeling method based on the variation of system energy, that is, the sum of the variations for Lagrange function and non-conservative force working is 0 during any time interval. 29 Based on the Hamilton principle, energy equation can be expressed as

where
The total kinetic energy of the system is produced by the motions of the joint, link and tip payload, which is

The potential energy caused by elastic deformation is

The system non-conservative force working is

Using the methods of variation and integration by parts, the Hamilton equation is

In equation (8),

where
It is worth noting that the dynamic model parameters, EI, m,
Model-based boundary control
As mentioned in the previous section, the dynamic model parameters are unknown or variable with respect to time in a large range. However, the changes of parameters cannot be infinitely fast in reality, which makes them be regarded as constant values at a certain moment. Even if there are some uncertainty in a small range, the stability of the closed-loop system can be ensured by designing appropriate control parameters. For these reasons, it can be assumed that the model parameters are constant at every certain moment, which lays the foundation for designing conventional boundary controller for the local model after time discretization.
By designing Lyapunov function, PD boundary control law is developed to suppress flexible vibration of the manipulator, that are
The boundary control law can be designed as

where
Remark 3
The required signals
Remark 4
The Lyapunov function is presented as
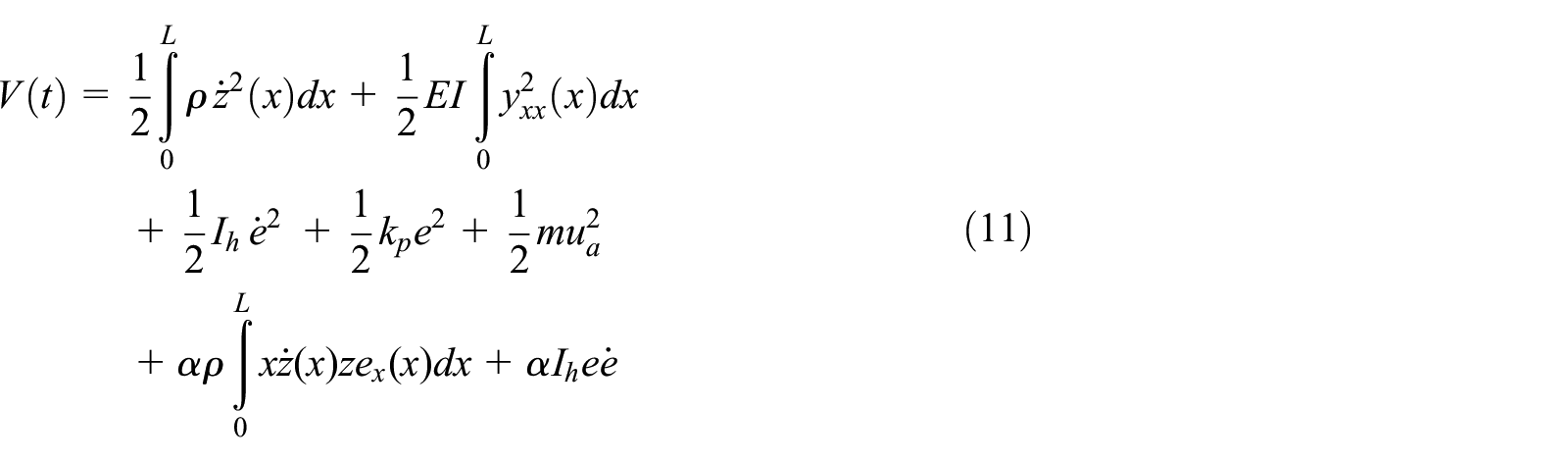
where
In equation (11), the first two terms are link kinetic energy and potential energy, which are designed for suppressing the flexible deformation and bending variation rate. The third and fourth terms are control error index, and the others are auxiliary terms. Furthermore, combined with equation (2), it can be easily obtained that
Since the next analysis process is roughly similar to Jiang et al.,
34
except the consideration of the infinite dimensional disturbance, which can make it simple to construct multiple model adaptive controller and reduce the calculation burden. In order to ensure the analysis process can be derived, some constraint conditions should be satisfied, which can be known easily and is omitted in this section. Furthermore, derivative of Lyapunov function is satisfied the inequality

where
Remark 5
In this section, the large uncertainties are divided into several parts with constant parameter values. The boundary controller and Lyapunov stability analysis are based on the local dynamic model, which can only ensure the local stability of the controlled plant, instead of the overall closed-loop stability.
WMMABC
In this study, the main problem is that the dynamic model parameters, EI, m,
Remark 6
On one hand, because the designed local controllers own certain robustness, and they are fused by the weighting algorithm, the small uncertainty can be allowed between the local model and the plant. On the other hand, an adaptive model can be added to enhance the effective coverage of the real plant, which can improve the control performance further.
In this section, an improved WMMAC is designed as follows. First, model set containing finite models is built to cover and approach the real system plant. Next, local boundary controllers for the models are designed, which constitute the controller set. Finally, the weighting algorithm is used to generate appropriate response signals based on the system performance index.
Model set and controller set
According to the parameter uncertainty ranges of the controlled plant, several local models are established to cover them, forming the model set
Thus, in the model set, the difference of the local models is the system parameters. And local model with constant parameters has been analyzed in section “System description.” The quantity and specific parameters of local models are shown in the numerical simulation.
Then, the boundary controller can be designed for each model in the model set
Remark 7
The issue of model set and controller set construction in multiple model adaptive control is complex. In order to cover and approach the real plant reasonably, the running data samples of the system can be clustered to build the model set, based on the Vinnicombe distance or others. For conciseness, the model set in the numerical simulation section will be directly assumed to be known, which can reasonably cover the plant, so that the effectiveness of the proposed strategy can be shown clearly.
Performance index and weighting algorithm
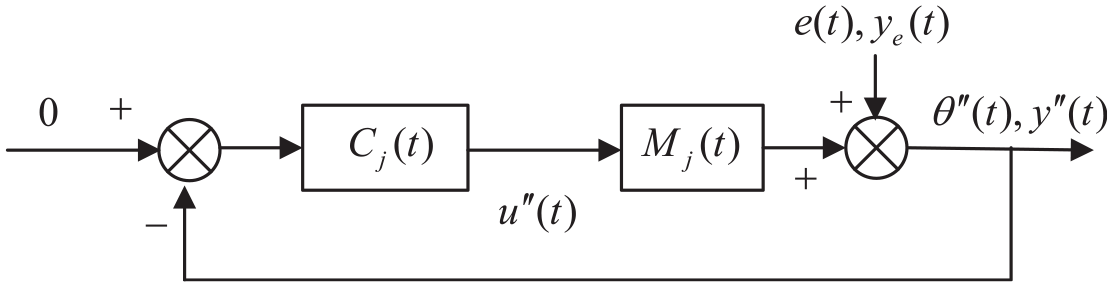
In order to illustrate the weighting algorithm 35 conveniently, a concise block diagram of the WMMAC system is shown in Figure 2.
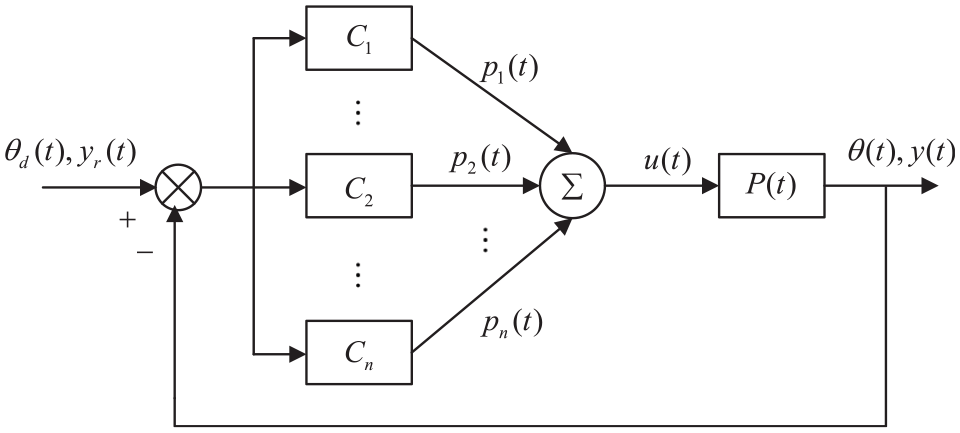
Simplified block diagram of a WMMAC system.
As shown in Figure 2, based on the each output

In order to reduce the calculation burden and relax the convergence conditions, a weighting algorithm based on model output error performance index is adopted. In view of the fact that most actual system are controlled by computers, the weights can only be calculated at the sampling time. To the best of our knowledge, there are two methods to deal with the discontinuity of control signals. One is that the system model can be controlled by discrete signals after discretization, and the other is that a zero-order holder can be used to obtain continuous weights. For succinct expression, the weighting algorithm is given in discrete form, so weights are

The error performance index is

where
Then, the weights can be obtained by


where

Remark 8
In contrast to the weighting algorithm in Zhang, 36 the error performance index in this article is more reasonable and efficient, which can gradually forget the historical accumulation effect and consider both the movement and vibration suppression of the flexible manipulator.
In addition, all the limit operations in this article are in the sense of probability 1. Thus, there is a weighting calculation situation that should be stated, which is that if the weight of one model is 1, the others are 0. When the system parameters are changed, the weights of the unselected model should be recalculated, which is not attainable according to equation (17). Therefore, the threshold value can be designed for limiting the weights to be 0.
Stability analysis
On the basis of weighting algorithm convergence and VES methodology, 37 this section shows the stability analysis of the overall closed-loop system, in which the local controllers are designed by PD boundary control.
Primarily, it should be explained that the stability of WMMAC means the boundedness of its input–output signals and the convergence of its performance index to the local control systems. 35
Theorem
If a WMMABC system has the following properties:
Variation range of system parameters can be approximated by model set
The local boundary control law in equation (10) is well defined, corresponding to the local model, whose closed-loop system is stable;
For a slow time-varying system, among any models switching, there is a model

where d is the system delay,
Proof
First, the convergence of the weighting algorithm is also ensured and the specific process is omitted, which can be obviously obtained following the proof in Zhang.
36
Second, based on the Lyapunov function in equation (11), it can be proved that the local control law makes the corresponding closed-loop system stable obviously. That is, when t tends to infinity,
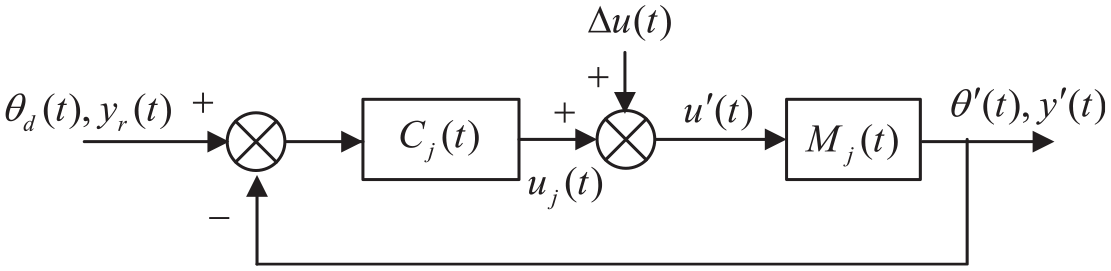
Then, the VES of a time-varying WMMAC system, as shown in Figure 3, can be decomposed into two subsystems,35,37 see Figures 4 and 5, where
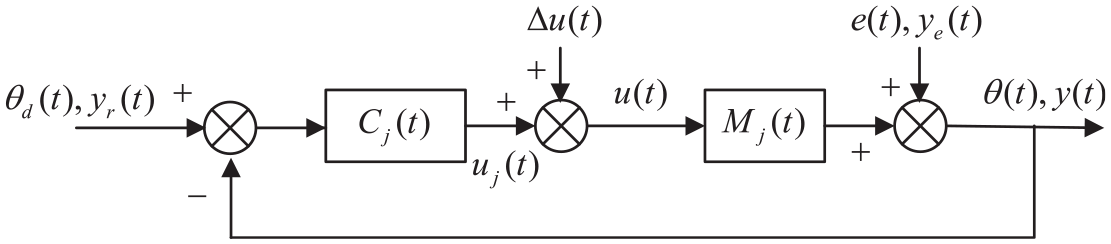
VES of a time-varying WMMAC system.
Subsystem 1 of VES.
Subsystem 2 of VES.
Considering that parameter jumps cannot be infinitely fast in reality, the system parameters can be regarded as constant values at a certain working point. So, the decomposed subsystem 1 in Figure 4 is equivalent to the time-invariant system in the input–output sense, whose stability can be proved according to Zhang.
35
Then, based on switching system theory,
38
the subsystem 1 of VES is overall closed-loop stable, that are
Furthermore, based on proof by contradiction
37
and the Cauchy–Schwarz inequality,
That completes the stability proof of the WMMABC system.
Numerical simulation
The effectiveness of the proposed WMMABC is illustrated by numerical simulation in MATLAB. In order to realize the simulation of PDE model without losing the flexible characteristics of the manipulator, the finite difference approach is adopted and the space–time steps are as small as possible, whose detailed values based on debugging experience are time step
In general, the boundary control has certain robustness, and the parameter variations of the flexible manipulator can be obtained through the clustering of sample data and theoretical analysis. Therefore, the parameter uncertainties can be effectively covered by a finite number of representative constant local models. For simplicity, there are two possible models to cover the parameter uncertainties, whose parameters have been obtained. Without losing the authenticity of the simulation system, the specific model parameters are given and adjusted based on the parameters in Jiang et al.
34
The parameters of model 1 are
The simulation results are presented in Figures 6–9. As shown in Figure 6, the angle positions of the flexible manipulator asymptotically tend to the target positions within 2.5 s along with the changes of target positions, and the angle speed is relatively smooth without oscillations frequently. Even when the system plant parameters jump largely at the seventh second, the controller can also ensure the angle position tracking accurately. Figure 7 shows the flexible deformations of each point on the flexible manipulator changes as time goes on. Since the target angle position changes at the 3.5th and 7th seconds, which is a square wave function as shown in Figure 6, the flexible deformations are difficult to avoid. Fortunately, the manipulator is quickly stabilized and the flexible deformations are effectively suppressed within 3.0 s. Especially when the system parameters change largely, the control system can effectively suppress the flexible deformation without obvious chattering, which mainly benefits from the implementation of WMMAC. The control inputs demonstrated in Figure 8 are restrained with [–10 N, 20 N], which shows that the control system just requires a small amount of energy. The weights of models are shown in Figure 9, whose switching process takes about 20 steps in the simulation when the plant parameters jump.

Angle position tracking based on WMMABC for the variable parameter manipulator.

Flexible deformations of the manipulator with the WMMABC.

Weighted multiple model adaptive boundary control inputs.

Weights for the local controllers of WMMABC system.
Remark 9
According to the above simulation results, especially those shown in Figures 6 and 7, the position tracking and vibration suppression are effective and stable, which are due to the satisfaction of the Theorem conditions, that are the stabilizing and tracking of the local boundary control strategy and the convergence of weighting algorithm. In summary, the Theorem effectively ensures the overall closed-loop system stability and provides theoretical guidance for the design of the controller. At the same time, the effective results of system simulation further verify the reliability of the Theorem.
In addition, to illustrate the improvement of control performance, the vibration suppression effect using conventional boundary control is given in Figure 10. As shown in Figures 6 and 7, it is obvious that the joint motor

Flexible deformations of the manipulator with conventional boundary control.
Conclusion
This article focuses on position control and vibration suppression issues of a flexible manipulator subjected to the large parameter uncertainties. To our knowledge, the proposed WMMABC based on improved weighting algorithm is first designed for the flexible manipulator, and the stability of the overall closed-loop system is ensured by Lyapunov stability theory and VES theory. The simulation results illustrate the effectiveness of the proposed control strategy. The main advantages of the proposed method are that (1) it can deal with the large parameter uncertainties, which cannot be accomplished by the existing other controllers, and (2) the performance index of weighting algorithm considers both angular position and flexible deformation, which can avoid system response chattering or instability caused by incorrect operations of weight calculation. However, the design process of the control method is complicated, especially the construction of model set. Therefore, the future works will be focused on construction and dynamic optimization of a reasonable precise model set, the position control and vibration suppression for a flexible manipulator with input and output constraints, and the practical experiments.
Footnotes
Acknowledgements
The authors would like to thank the anonymous reviewers for their constructive and insightful comments for further improving the quality of this work.
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This work was supported by National Natural Science Foundation of China (No. 61520106010, 61741302).