
Abstract
This paper formulates an enhanced Model-Reference-Adaptive-Controller (MRAC) that is augmented with a fuzzy-immune adaptive regulator to strengthen the disturbance-attenuation capability of closed-loop under-actuated systems. The proposed scheme employs the conventional state-space MRAC and augments it with a pre-configured fuzzy-immune mechanism that acts as a superior regulator to dynamically modulate the adaptation gains of the Lyapunov gain-adjustment law. The immunological computations increase the controller's adaptability to flexibly manipulate the damping control effort under exogenous disturbances. The efficacy of the proposed Immune-MRAC law is comparatively analyzed under practical disturbance conditions by conducting real-time hardware experiments on the QNET rotary pendulum. The experimental outcomes validate the faster transient-recovery behavior and stronger damping effort of the proposed control law against the exogenous disturbances while preserving the system's asymptotic stability and control energy efficiency.
Keywords
Introduction
The Rotary-Inverted-Pendulum (RIP) is used as a standard benchmark platform to verify the robustness of any designed control strategy for nonlinear dynamical systems, due to its inherent under-actuated configuration, nonlinear characteristics, and open-loop kinematic instability. 1 The RIP stabilization control problem is used in developing a stable gait control for legged robots, orbital stabilization of the satellites, attitude stabilization of submarines, and posture stabilization of rockets and rotorcrafts during take-off. 2 This control problem becomes more challenging when the system encounters exogenous disturbances that pose a serious threat to the mission's safety. 3
Related work
Several RIP stabilization control strategies have been proposed in the available literature. 4 The structural simplicity of PID controllers incapacitates them to address the nonlinear disturbances. 5 The PID gains inevitably amplify the measurement noise content which eventually corrupts the control effort. The intelligent controllers require heuristically defined logical rules which rely upon the expert's knowledge or large sets of training data to formulate an agile control law.6, 7 These control realizations inevitably involve an excessive computational burden. The sliding-mode controllers achieve the desired robustness at the cost of highly discontinuous control activity which imposes peak servo requirements upon the actuator, and thus, induces chattering in the state response. 8 The dependance of optimal linear-quadratic-regulator on the system's linear state-space model renders it inefficient against parametric and model variations. 9
The adaptive controllers use pre-configured meta-rules to dynamically adjust the critical controller parameters and redesign control law online to reject the exogenous disturbances.10, 11 The nonlinear-type gain-scheduling mechanisms use well-postulated meta-rules and nonlinear scaling functions to dynamically adjust the controller parameters. 12 However, tuning the associated hyper-parameters and deriving a sufficient stability proof is a cumbersome process. The model-predictive-controller yields time-varying controller gains by solving a finite-horizon problem. 13 However, imprecise tuning of the hyper-parameters leads to wrong predictions which leads to frail control effort, especially under long-drifting disturbances. The derivation of accurate state-dependent-coefficient matrices used to formulate the State-Dependent-Riccati-Equation-based controller is quite difficult due to the complex geometry of the higher-order dynamical systems. 14 The model-reference-adaptive controller uses a Lyapunov function to minimize the tracking error between the outputs of the reference and the controlled system. 15 This arrangement renders optimality in the control behavior while preserving its asymptotic stability. 16 However, the fixed inner adaption-gains of the MRAC prevents it from addressing the rapid error variations. 17
Proposed methodology
The main contribution of this article is to methodically formulate a novel self-regulating MRAC procedure that enhances the robustness of under-actuated mechatronic systems against bounded exogenous disturbances. The proposed scheme employs the state-space MRAC as the baseline controller that tracks an LQ-regulated reference model. This MRAC structure is robustified by retrofitting it with a pre-configured fuzzy-immune adaptation mechanism that dynamically modulates the inner adaptation gains of the Lyapunov gain-adjustment law. The adaptation law utilizes the system's control input feedback along with well-postulated immunological rules to self-tune the state-compensator gains and achieves the desired objectives. The efficacy of the proposed Immune-MRAC (I-MRAC) law is evaluated by conducting real-time hardware experiments on the QNET rotary pendulum. The experimental outcomes validate its faster transient-recovery behavior and stronger disturbance-rejection behavior while preserving the system's stability and control energy efficiency.
The proposed I-MRAC scheme affords several benefits that are typically unachievable via the conventional control techniques. The MRAC tracks an optimal reference model to adjust the gains while preserving the Lyapunov stability. This feature prevents the controller from imposing large control requirements and unnecessary chattering in the response. Unlike LQR, the MRAC quickly compensates for the model and exogenous disturbances. The adaptive-gain adjustment also improves the system's immunity to measurement noise. Any set of fixed-values of MRAC's inner adaptation-gains can only meet the control requirements for a limited range of operating conditions. This feature renders the MRAC insufficient against abrupt error variations. Hence, in this article, the fuzzy-immune mechanism acts as a superior regulator to modulate the adaptation-gains of the MRAC law and nullify this inherent problem. The fuzzy-immune mechanism mimics the adaptability of the biological immune systems to efficiently reject the exogenous disturbances. The said mechanism is formulated via well-established fuzzy-rules to strengthen the controller's robustness. Finally, the proposed I-MRAC does not require online training process, modeling of intrinsic nonlinearities, or predictions which renders this technique computationally inexpensive and easily realizable with modern computers.
The utilization of fuzzy-immunological computations to adaptively tune the MRAC's inner adaptation gains, to strengthen its disturbance-rejection capability, has not been attempted previously in the available literature. Hence, this idea is the novel contribution of this paper.
The rest of the paper is organized as follows: The mathematical description of the RIP system is presented in Section 2. The fixed-gain LQR and the conventional MRAC laws are constructed in Section 3. The formulation of the proposed I-MRAC law is presented in Section 4. The performance of I-MRAC is experimentally assessed in Section 5. The article is concluded in Section 6.
System modeling
The QNET Rotary Pendulum Setup is selected to experimentally investigate the proposed control scheme. The schematic of a conventional rotary pendulum is shown in Figure 1. The system comprises a rod whose free end is coupled to a 0.1 kg mass while the pivoted end is coupled to a rotary encoder that measures the pendulum angle,

Simplified schematic of the RIP system.
Mathematical model
The dynamical model of the RIP is formulated using the Euler-Lagrange method. The derivation is initiated by computing the difference between the system's total kinetic energy and total potential energy in terms of its state-variables (


These linear equations are used to derive the system's nominal state-space model. The general state-space representation of a linear system is expressed in Eq. 2.




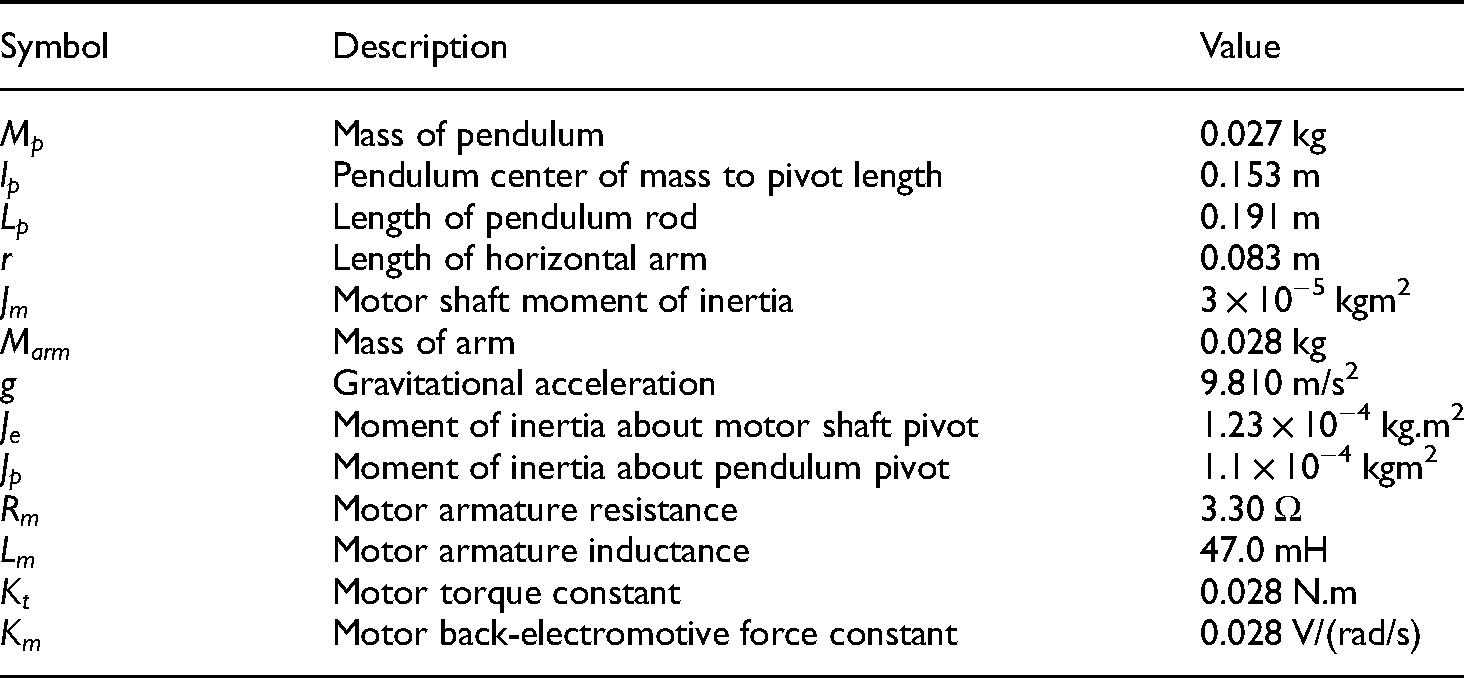
Model parameters of QNET RIP.
Baseline model-reference-adaptive-control
The MRAC's design methodology is straight-forward. Initially, an optimal LQR controller is constructed. The stabilized closed loop system, given by LQR method, is declared as the reference model (
LQ-regulated reference model
The conventional LQR yields an optimal control trajectory by minimizing a quadratic-performance-index (QPI), expressed in Eq. 5, which captures the state variations and the control input associated with the linear dynamical system.
21








State-space MRAC law design
The conventional MRAC law updates the controller-gains online via a Lyapunov function that minimizing the tracking-error between the outputs of the LQ-regulated reference model and the actual system.
23
Consider the linear system expressed in Eq. 2. It is desired to construct an adaptive control law that tracks and imitate the response of the LQ-regulated reference model (


Compatibility condition: Generally, it is impossible to acquire a vector 














Online adaptation-gain modulation
The matrix 


Conventional fuzzy inference adaptation
The conventional fuzzy logic scheme (FLS) is employed as the baseline mechanism to self-regulate the MRAC law.
27
It uses a pre-defined set of qualitative rules to self-tune the critical parameters.
28
In this research, the FLS is formulated as an even-symmetric nonlinear function that is bounded between 0 and 1. It uses compounded state-error variable, The value of The value of 

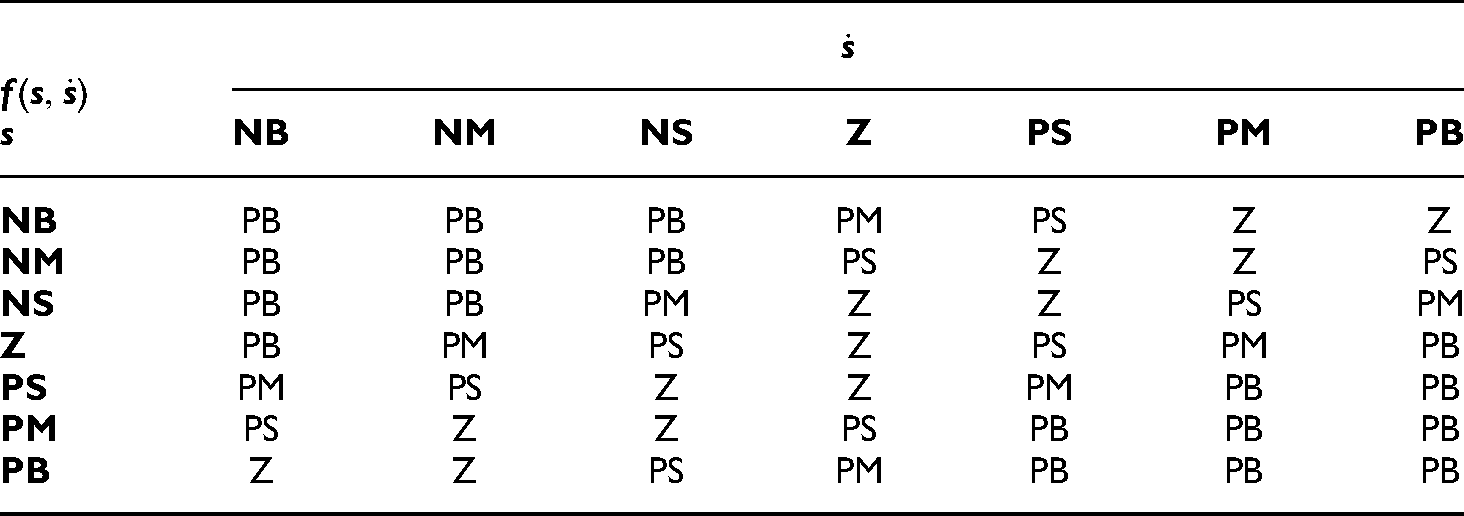
These characteristics enhance the adaptability of the MRAC law. The consequent fuzzy-rule-base is shown in Table 2. The following min-max inference technique is adopted to perform the implication.






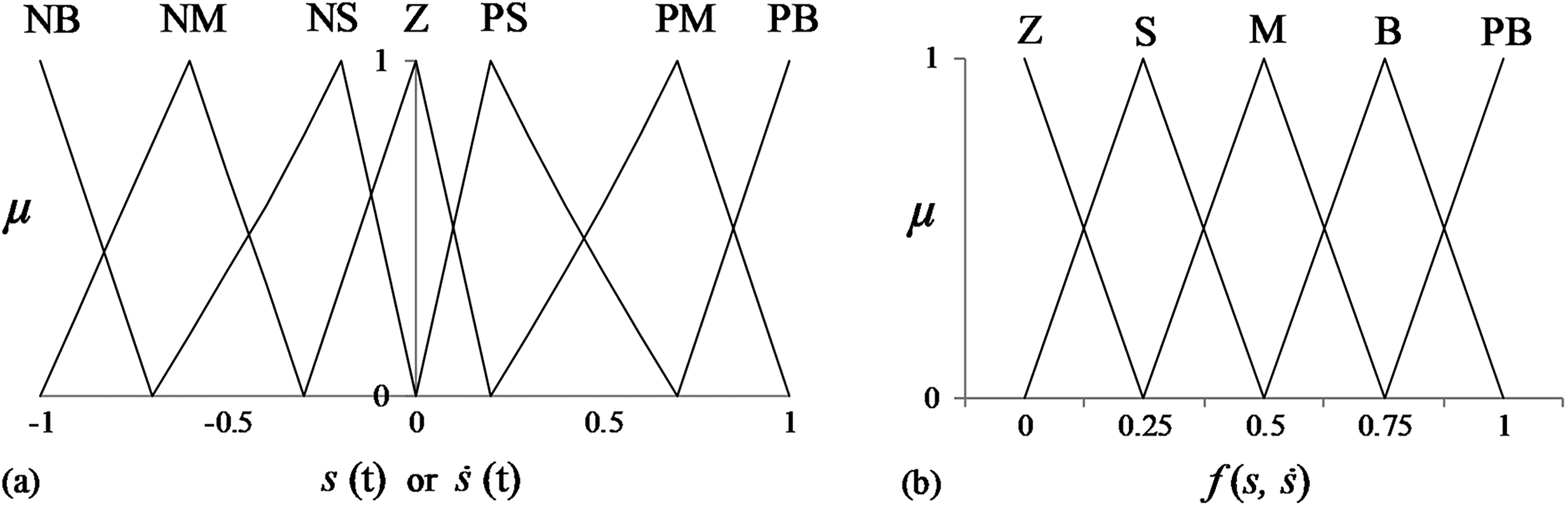
(a) input mfs of FLS, (b) output mfs of FLS.
Two-input rule-base of FLS.
The parameters

Block diagram of the F-MRAC.
Fuzzy-immune adaptation



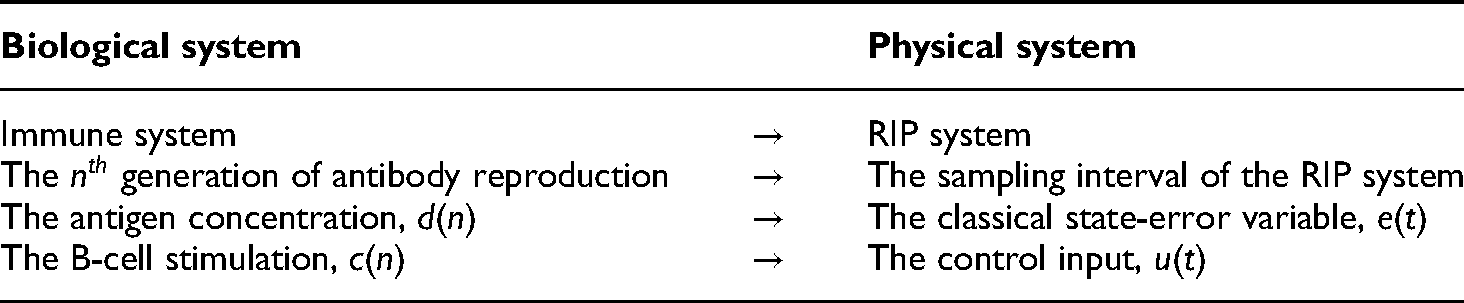
The aforementioned map yields the following artificial-immune control law.

Two-input rule-base to implement the stimulus function.

The fuzzy nonlinear function 




(a) input mfs of fuzzy-immune system, (b) output mfs of fuzzy-immune system.
The parameters
The tuned values of these parameters are

Block diagram of the proposed I-MRAC.
The formulation of LQR reference model requires a well-identified linear state-space model of the dynamical system (a priori). However, this difficulty can be addressed by using modern identification tools for a given complex dynamical system. Secondly, the I-MRAC requires offline selection of a relatively larger number of hyper-parameters associated with the fuzzy-immune system. This has been addressed in this research by iteratively minimizing the cost-function
Experimental analysis
This section details the procedure used to conduct the experiments along with the comparative analysis of the corresponding graphical results.
Experimental setup
In this work, the QNET Rotary Pendulum Board is used to conduct real-time experiments. The experimental setup is illustrated in Figure 6. The NI-ELVIS II Data-Acquisition board acquires the angular measurements at a sampling rate of 1.0 kHz, and then serially communicates the digitized data to a LabVIEW-based control application at 9600 bps. The control software is operated on a 64-bit and 1.8 GHz microprocessor with 8.0 GB RAM. The front-end of the said application is used to visualize and record the real-time state and control signal variations. The control system is implemented via the block diagram tool of the application. The adaptation laws are programed via C-language in the Math-Script tool of the LabVIEW software. This custom-built control routine processes the incoming sensor data to update the control signals that are serially fed to the hardware setup via the ELVIS board. The onboard motor driver circuit subsequently modulates and amplifies these control signals fed to drive the motor. The motor driver is durable enough to safely handle the disputed control activity.

The QNET rotary inverted Pendulum setup.
Test and results
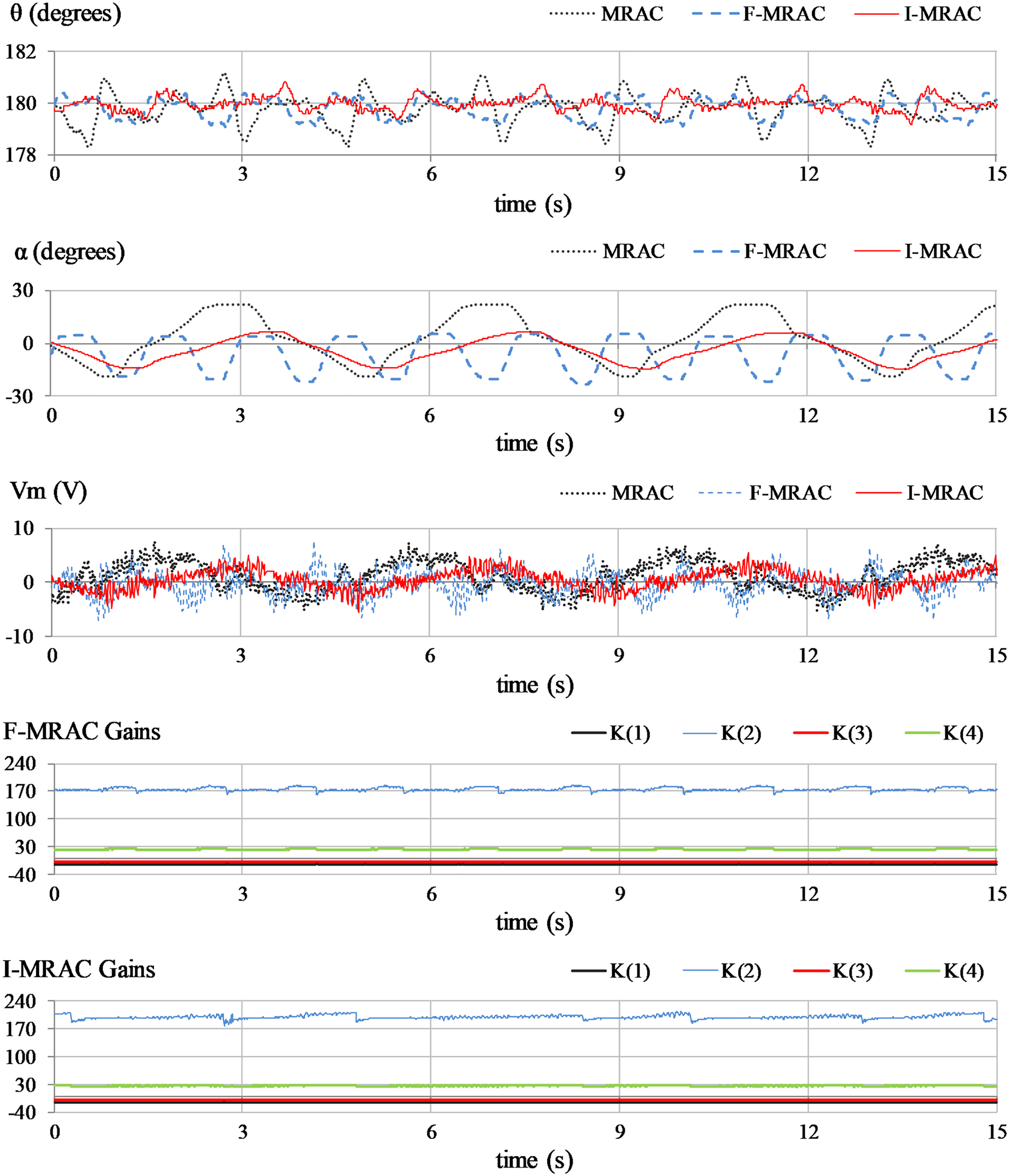
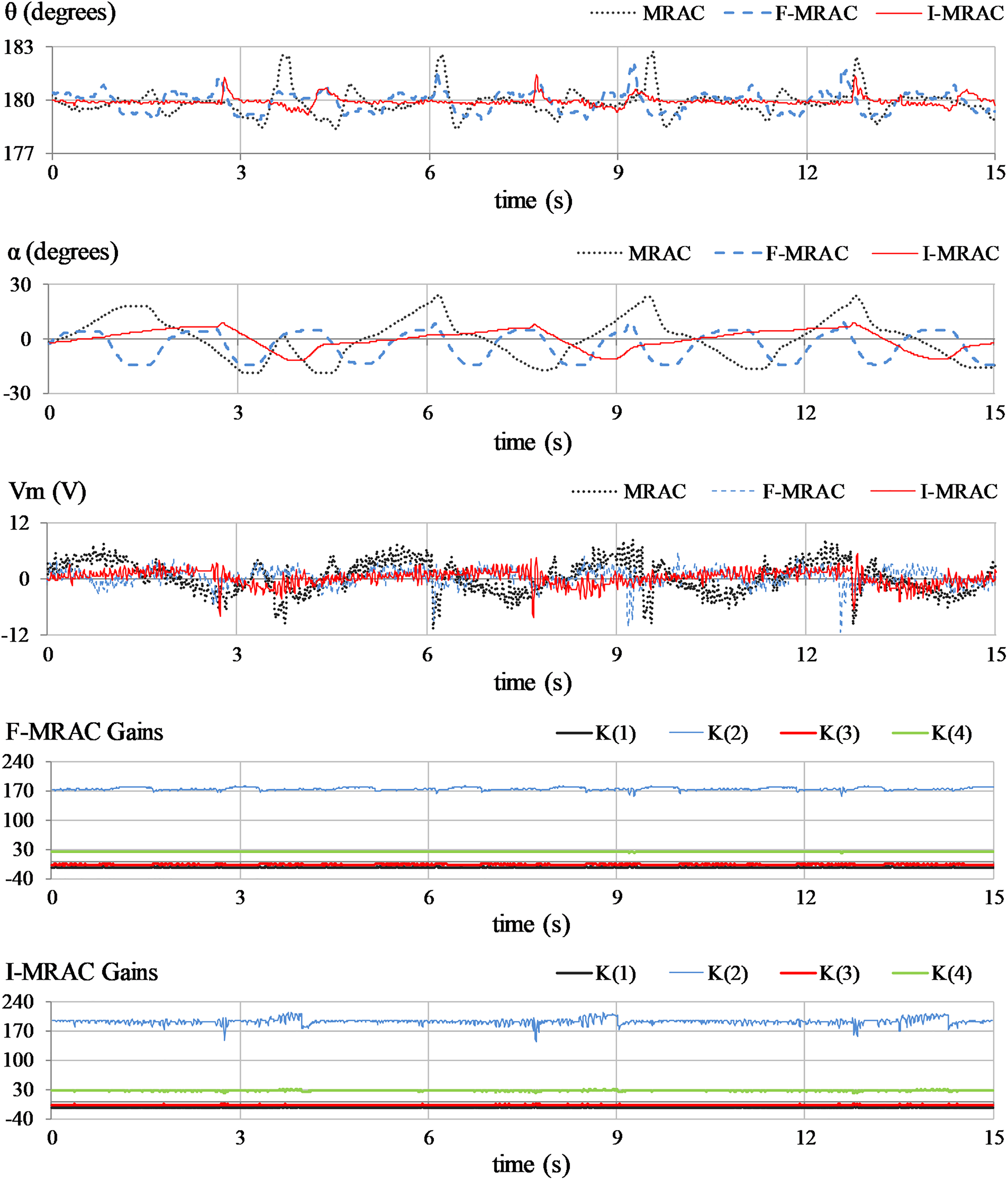
The aforesaid MRAC variants are experimentally examined by performing the following five test cases. The pendulum rod is erected manually and stabilized at the beginning of every trial while ensuring same initial condition. In each test-case, the responses of
RIP's response under normal conditions.
RIP's response under impulsive disturbances.

RIP's response under step disturbances.

RIP's response under sinusoidal disturbances.

RIP's response under model variation.
Analysis and discussions
The performance analysis is done via the following standard-performance-indicators (SPIs): the root-mean-squared-error (ex_RMS) in the responses of α and θ, the magnitude of overshoot or undershoots (Mp,x) under disturbances, the transient-recovery time (ts,x) taken by the response, the offset in the arm (αoff) under disturbances, the peak-to-peak amplitude of fluctuations in the arm (αp−p) under disturbance, the mean-squared-voltage (MSVm) to determine the average control energy dissipation, and the peak control voltage (Vp) observed under disturbances. The experimental results are summarized in Table 4.
Summary of experimental results.

In
The performance assessment validates the enhanced position-regulation, time-optimal disturbance-rejection, and energy-efficient control activity of the I-MRAC in the aforementioned tests. Under every disturbance scenario, the I-MRAC exhibits minimal position-regulation error and the most economical energy consumption. The F-MRAC manifest the second-best performance. The improved robustness of I-MRAC is accredited to the dynamic adjustment of
The fuzzy-immune adaptation addresses all the inherent shortcomings of the MRAC system by using the real-time control-input dynamics to autonomously adapt the
Conclusion
This paper formulates an immunologically-driven self-regulating MRAC law that strengthens the disturbance-rejection capability of under-actuated mechatronic systems. The proposed I-MRAC employs real-time control-input variations in conjunction with pre-calibrated immunological rules to modify the adaptation gains of the MRAC law. These immunological computations increase the controller's adaptability to effectively execute self-tuning in a real-time environment. The I-MRAC flexibly manipulates the tightness of the damping control force and response speed under exogenous disturbances while economizing the control-energy expenditure. These propositions are justified by the experimental results. The proposed controller is highly-scalable and can be extended to other under-actuated systems. Furthermore, this technique does not put any recursive computational burden and can be easily realized using modern digital computers. In the future, meta-heuristic optimizers can be employed for the offline selection of the hyper-parameters. Moreover, the prescribed control law can be further optimized by replacing the immune-adaptation scheme with other computational intelligence algorithms.
Footnotes
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) received no financial support for the research, authorship, and/or publication of this article.
Author biographies
Omer Saleem is an Assistant Professor at the Department of Electrical Engineering, National University of Computer and Emerging Sciences, Lahore, Pakistan. He received his Ph.D. in Electrical Engineering with specialization in adaptive control systems from University of Engineering and Technology, Lahore, Pakistan. His research interests include the design of self-tuning adaptive state-feedback controllers for electro-mechanical systems.
Mohsin Rizwan is an Associate Professor at the Department of Mechatronics and Control Engineering, University of Engineering and Technology, Lahore, Pakistan. He received his Ph.D. from University of Texas at Arlington with specialization in optimal control and optimization. His research interests include nonlinear system modeling and control.
Fahim Gohar Awan is an Associate Professor at the Department of Electrical Engineering, University of Engineering and Technology, Lahore, Pakistan. He received his Ph.D. in Electrical Engineering from University of Engineering and Technology, Lahore, with specialization in electrical instrumentation. His research interests include simulation, modeling and analysis.