
Abstract
Valve-controlled asymmetric cylinder is widely used in servo loading system. As a kind of typical electro-hydraulic servo system (EHSS), it inherently has the characteristics such as high order nonlinear, strong coupling, and uncertain, therefore, conventional control strategy is difficult to satisfy the requirements of high-performance control. In this paper, a novel linear active disturbance rejection control (LADRC) method was proposed, in which the internal and external disturbances were actively estimated by the third-order linear extended state observer (LESO) in real-time, and rejected by the control law of proportional integral control (PID) with acceleration feed-forward. The stability of the proposed method was proved, and the influence rules of the LADRC parameters on the control performance were revealed by simulation. Finally, comparative experiments between LADRC and PID control were carried out, results showed that the disturbances can be effectively compensated and the control goals can be successfully achieved with the proposed method.
Keywords
Introduction
As a kind of important actuator, valve-controlled asymmetric cylinder electro-hydraulic servo system (EHSS) has been widely used in servo loading system such as robotic arms, 1 automotive suspension, 2 and steel manufacturing equipment, 3 etc. due to the characteristics such as high power-mass ration, fast response, high stiffness, and less space occupation. However, EHSS exhibits significant higher nonlinear dynamics, as for instance dead zone of the valve, flow, pressure, friction, and output saturation of the controller. Moreover, it is common that some of the system parameters are uncertain, especially the time-varying load and the structure of the asymmetry hydraulic cylinder. Therefore, in order to improve the tracking performance of EHSS, treatment of the uncertainties and development of high-performance closed-loop controllers have become great challenges in both academic and industrial fields over the last decade.
To achieve the high-performance tracking control of EHSS, model-based design method, known for its rigor, is highly focused in the modern control theory, such as adaptive control, 4 robust control, 5 variable structure control,6–8 H-infinity,9–11 fuzzy control,12,13 neural network control,14,15 feedback linearization control,16–18 internal model control (IMC), 19 back-stepping control, 20 and so forth. However, the influence of various uncertain factors on the control performance is rarely considered comprehensively, such as change of the load, the modeling error, the sensor noise, and the un-modeled dynamics. Adaptive control is mainly applicable to linear systems, and the uncertainty can be expressed in the form of unknown linear parameters. Unfortunately, the nonlinear uncertain often go far beyond the scope of the adaptive control theories in the EHSS, which will result in more complexity of the adaptive algorithm, and difficulty for the direct application in engineering practice. Robust control technique has also been utilized in hydraulic servo systems, to deal with parametric uncertainties and uncertain nonlinearities. However, typical nonlinear robust control usually requires that the uncertainties are bounded in some categories and have certain structural properties. In engineering practice, the value of the disturbance is too difficult to express precisely, especially the varying payload. To ensure the robustness of the control system, the upper bound of the system uncertainties is usually expressed in a conservative way, which will limit the application scope of the controller. Variable structure control (VSC) is a special kind of nonlinear control strategy. When the system state is operating in the sliding mode or the self-stabilizing domain, the system parameter variations and external disturbances are completely invariant, but the upper bound of the uncertain dynamic or disturbance still need to be provided in order to realize the sliding mode of the self-stabilizing domain threshold. At the same time, high frequency modes of the system is easy to be excited by the vibration caused by the switching control function of VSC, and the control performance will be degraded and even become unstable.
The feedback linearization method has some robustness with respect to both parametric uncertainties and uncertain nonlinearities. However, the accurate mathematical model and system states are also needed to design the controller. In the back-stepping design process, explosive terms are easy to produce for the high order EHSS, and the designing control law is difficult to implement in engineering due to the complexity.
What is more, various disturbance estimation techniques have been proposed to compensate or suppress the effect of disturbance on the EHSS, such as the disturbance observer (DOB),21,22 the sliding mode observer (SMO), 23 high gain state observer (HGSO), 24 and the extended state observer (ESO) 25 etc. In most estimators, such as DOB, SMO, and HGSO, the disturbance is reconstructed under assumption that the exact mathematical model is available. Its applicability is however often unsatisfied due to the lack of detailed plant model in practice, or the high cost for obtaining the model. Firstly, the structural and parametric uncertainties, especially the time-varying payload make it difficult to describe the dynamic model by a precise mathematical expression. Secondly, the system position, velocity, acceleration, and other system states are needed in the process of the controller design. Nevertheless, only the piston displacement can be directly measured in real engineering practice. Finally, the EHSS process can easily falls into unstable state if the control is designed solely based on a model because of the significant changes of the payload and the uncertain parameters.
Therefore, the strict model-based designs show their limitations, and the control design must be carried out with less model information. Hence, the PID control strategy always plays an important role in EHSS, thanks to the advantages of simple principle, convenient use, and strong adaptability. However, due to the hysteresis effect, overshoot, and oscillation is easily to form in PID control, and the high-performance of the control requirements is difficult to meet.
From the above analysis, it can be concluded that a control approach, suitable for EHSS with great disturbance rejection ability, strong robustness, easy to apply, and independent of an exact model is urgently needed for high performance displacement tracking control.
Based on the extended state observer (ESO), the active disturbance rejection controller (ADRC) is an efficient control method, to deal with the plants containing lumped uncertain dynamics and disturbances, and without depending on the exact model information. The key of ADRC is to estimate the total uncertainty (or total disturbance) online by the ESO, which lumps the internal uncertain dynamics and the external disturbances. Under the framework of ADRC, the total disturbance is treated as the extended state, and effectively estimated by the ESO and compensated in real time. The original nonlinear dynamic system will be forced to behave like a simple, disturbance-free plant.
It has attracted application of several industrial companies, such as Parker Hannifin extrusion plant and Texas instrument. Up to now, the idea of ADRC technique has been successfully applied in solving various kinds of engineering problems, such as chemical, 26 electric system, 27 robot, 28 and other process industrial systems. 29
This research aims to develop a robust and easy-to-implement control approach, and provide a practical solution based on LADRC technology to achieve high-performance tracking control of EHSS, even the EHSS model information is unknown. The closed-loop stability of the EHSS has been verified, and the feasibility and effectiveness of the proposed method has been demonstrated by simulation and experiments.
The rest of this paper is organized as follows. Section 2 describes the detailed nonlinear model equations with a single-rod electro-hydraulic system. Section 3 presents the combined structure of LADRC with acceleration feed-forward, stability analysis is given in section 4. Comparative simulation and experiments are carried out in section 5, and the influences of the observer bandwidth and controller bandwidth on control performance are also revealed. Then the conclusions are drawn in section 6.
System modeling and problem formation
It is known that EHSS is a complex multivariable coupled SISO (Single-Input Single-Output) nonlinear system. The schematic diagram of EHSS configuration is show in Figure 1, which mainly consists of the filter 1, motor 2, hydraulic pump 3, three-position four-way electro-hydraulic proportional valve 4, overflow valve 5, single-outlet hydraulic cylinder 6, load 7, controller 8, linear displacement sensor 9, analog-to-digital converter 10, and the digital-to-analog converter 11. The supply pressure
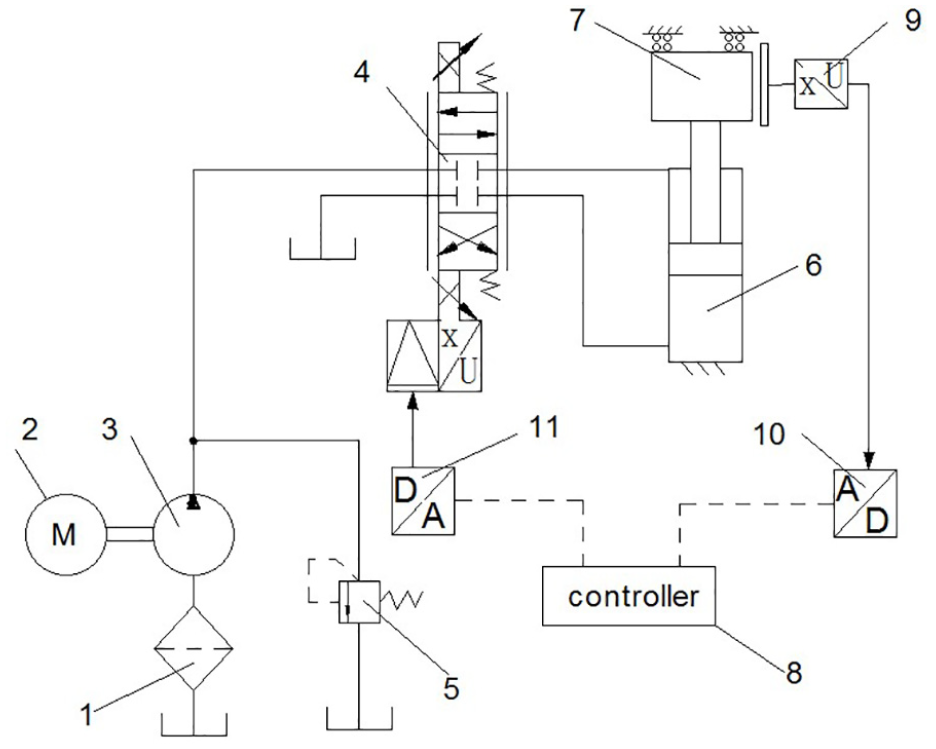
Schematic diagram of the EHSS of valve-control asymmetric cylinder.
In operation, the real-time load displacement
Under the control of the LADRC, the exact model of EHSS is not required. Nevertheless, the model information is particularly helpful for the design of the controller and enhance of the control quality. So, the dynamic mechanism model of the EHSS is constructed based on the nominal values of physical parameters.
Based on Newton’s second law, the dynamics of elastic and inertial load can be described by

where
Ignoring the external leakage of the cylinder, the flow continuity equation of the two chambers can be described by


where
Define switching functions


where
Considering that the dynamic response speed of the electro-hydraulic proportional valve used is much higher than the hydraulic cylinder operation frequency band, the linear model of the valve can be expressed by

where
Substituting equation (4) into equation (3), then


For simplicity, define

and

where


Substituting equation (8) into equation (2), then


Differentiate the equation (1) and substitute equation (9) into it, then the dynamics of elastic and inertial load can be expressed as

The equation (10) is only an ideal nominal model of the EHSS of valve-controlled asymmetric cylinder. But it has some adverse factors such as uncertainty, nonlinear and strong coupling, which make the high performance control become difficult. Firstly, the mechanical system parameters are time-varying, such as the control gain
Model simplification and design of the LADRC control law
As shown in Huang et al.
30
, the framework of ADRC does not set strict mathematical constraints on the total uncertainty or the uncertain plant, the order (or relative degree) of the plant
Model simplification
The nominal model (10) of the EHSS is a high-order nonlinear uncertain system. How to select the order (or relative degree) of the controlled plant becomes the primary problem during the design of the ADRC controller.
The Valve-controlled asymmetric cylinder electro-hydraulic position servo system, which essentially adjusts the opening of the electro-hydraulic proportional valve port by adjusting the control input voltage, to realize the adjustment of the two-chamber flow of the inflow and outflow cylinders, then the piston operating speed, and finally the piston displacement control can be realized.
Since

Considering time delay exists in the EHSS, from control input

where
Zhao and Gao 33 proposed a modified ADRC design method to accommodate time delay. If the delay time is known, an equivalent delay is introduced to the control signal, which will synchronize the signals that go into the observer. Finally, the purpose of improving the state estimation accuracy, enhancing the anti-interference ability, and reducing the observer bandwidth are realized. However, the setting delay time mismatch may cause the degrade of control performance.
Generally, the time delay could be approximated by a first-order inertial link 32 as

Comprehensively consider equations (4), (8), (11), and (12), and perform Laplace transform. The relationship between the control input voltage

Where
From equation (14), the EHSS can be considered as a second-order system for the next controller design.
Control gain estimation value


The total disturbance
In equation (15), the constant coefficient

yet, in equation (15), it is the estimated value of the

Although the value of
The time delay transfer function can be described as

and the frequency characteristics are

Equation (20) shows that the time delay only affects the phase and does not affect the amplitude.
Therefore, it is reasonable to use the second-order system of equation (15) to describe EHSS, which is beneficial to the design of the LADRC controller.
Design of the LADRC control law
Based on the extended state observer (ESO) and as an alternative solution, LADRC can actively estimates and compensates for the effects of discrepancies between the real process and the assumed mathematical model as well as the influence of any unknown external disturbances in real time, and the real process will forced to behave like a simple, disturbance-free plant. Unlike the tradition control methods, the controller draws the information needed to control the plant is not depended on the model of the plant but on the ESO. It will offer a new and inherent robust control method for EHSS. The dependence on explicit modeling will be greatly reduced, and it has the advantages of simplicity in engineering implementation and superior performance. Based on equation (15), the LADRC schematic diagram of the EHSS is shown in Figure 2, which includes the tracking differentiator (TD), state feedback controller, and linearly extended state observer (LESO).

The schematic diagram of the LADRC for EHSS.
In order to solve the contradiction between the fastness and stability of the control system, TD is used to arrange the transition process.
The third-order linear TD has the following form 32

where
Define

Where
Based on equation (22), the third-order LESO such as

With the observer gain

can be constructed, so that

with a well conducted observer, the states of the system
Employing the third-LESO of (22) in the form of (23), the state feedback control law with acceleration feed-forward is given as

where
Submitting equation (26) into equation (15), then the closed EHSS become

With a well-design LESO, the first term in the right hand side (RHS) of (27) is negligible and the rest of the terms in the RHS of (27) constitutes a generalized PD controller with an acceleration feed-forward.
For the convenience of parameter tuning of the state feedback controller, the parameterization technique proposed by Gao
34
is adopted, and

Then
Stability analysis
To assess the reliability of the proposed method, it is very important to perform the stability analysis of the proposed method.
Convergence of the third-order LESO
Define the state estimation error vector of third-order LESO as

Subtracting equation (22) from equation (23), the error dynamics of the LESO is as follows

where
For the purpose of parameterization and the stability analysis, the states transformation is define as

Then, equation (30) can be written as

where
Solving equation (32), the solution of

Let
Since

The matrix

for all

for all
Let

Substitute equations (35) and (36) into the inequality (32), then

for all
Note that
Let

for all

Let
According to

for all
The equation (42) show that the higher of observer bandwidth
Convergence of the LADRC
Define the expected tracking state vector as

and the closed-loop tracking error vector as

then the equations (43) and (44) will be hold


Submitting equations (26) and (28) into equation (46), then

The error dynamics of the EHSS feedback loop can be expressed by

where
Solving equation (47), the analytical expression is

Since

Let


Since

so

Considering the matrix

for all
Note that
Let

for all
Let

for all

for all

for all
From equations (49), (52), (56), and (59), the following result can be hold

for all
The equation (60) shows that the tracking error of the EHSS output is bounded and the upper bound of the error monotonously decreases with the increase of the observer bandwidth
Simulations and experimental verification
To verify the feasibility and effectiveness of the proposed control strategy, simulations and experiments have been carried out for the valve controlled asymmetric cylinder electro-hydraulic servo system, including trapezoid instruction and sine closed-loop tracking control tests.
Simulation analysis
Based on the differential equations (1)–(5) obtained in section 2 and the actual working conditions, the dynamic model of EHSS was built using the S-function in Matlab/Simulink, and the model parameters were selected as in Table 1.
Parameters of the EHSS.

It means that in the following simulation, the influence of all disturbances on the performance of the control system is comprehensively considered, including structure uncertainty, parameter uncertainty and the time-varying payload etc. The simulation configurations were as follows: ode3 (Bogacki-Shampine) was selected as the solver. The fixed-step and sampling period were set to 0.001 s, which were the same as the real experiment system. Finally, the robustness of various LADRC parameters (
Case 1: Influence of the control gain estimate variations on the control performance
Due to the structural asymmetry and the initial volume uncertainty of the cylinder, the control gain of the EHSS has a great uncertainty in the process during the piston moving back and forth. In order to verify the robustness of the proposed control method, time-varying control gain

Tracking response curves of the EHSS under the control of LADRC with different control gain estimation values (
The simulation results showed that: If the values of
Case 2: Robustness against the variations in the LESO bandwidth
In order to verify the robustness of LESO with the bandwidth

State estimation errors of LESO under different observer bandwidths (

Displacement tracking curves of the EHSS under the control of LADRC with different observer bandwidths (
The simulation results showed that: the observer bandwidth
Case 3: Robustness against the variations of
In order to verify the robustness of the proposed control method under variations controller bandwidth
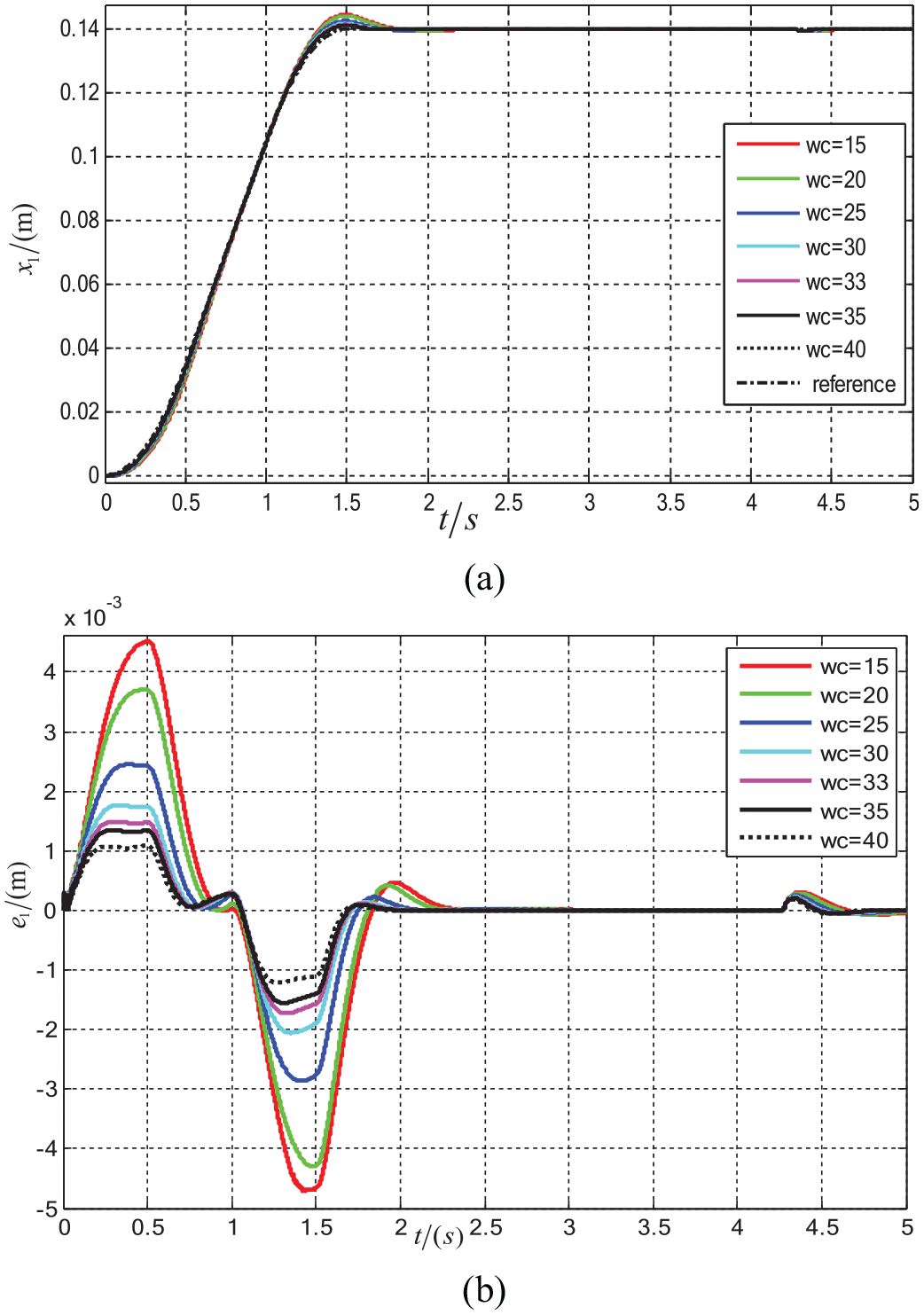
Displacement tracking curves of EHSS under the control of LADRC with different controller bandwidths (
The simulation results showed that: when both values of
Case 4: Analysis of the disturbance rejection performance
In order to evaluate the disturbance rejection ability of the presented method, the generalized disturbances including the external disturbance, the unknown dynamics and the high frequency measurement noise were comprehensively considered into the research. The random white noise of the power, sampling period and the seed were selected as

Displacement tracking curves of the EHSS under the control of LADRC (
Figure 7(a) shows that: LADRC controller has a strong robustness against the uncertain disturbance. When trapezoid instruction is tracked, the tracking error and the steady error are only 1.8 mm and 0.1 mm, both are only 30% and 10% of that in PID control, respectively. After 5 s, with the introduction of disturbances, the control performance of LADRC is almost unchanged, yet the PID control performance degraded dramatically. When different frequency sine signals such as
The test bench and experiments
Simulation results show that the developed method was simple, effective, easy to implement, and robust to the uncertain disturbances. The piston trajectory can be tracked quickly and accurately in the absence of a precise plant model. In this section, the developed method was carried out on the test bench of the EHSS to verify the effectiveness of the theory and simulation.
Figures 8 and 9 showed the system and schematic diagram of the experimental platform. It was mainly composed of two parts: the real-time control system and the test bench of the EHSS. The real-time control system, with a 1000 Hz sampling frequency, mainly composed of a host industrial computer, a slave digital processor 1103, the associated PCI-bus data acquisition cards including a 16-bit bipolar A/D converter and a 16-bit bipolar D/A converter. The ControlDesk software was employed to develop the human-computer interaction in the host computer, and the control algorithm was carried out in Matlab /Simulink with C language. The test bench is consist of the load mass, the Keyence magnetic levitation linear displacement sensor (1800X10400), the three-position four-way electro-hydraulic proportional valve (Rexroth 4WREE10V-75-7X/6EG24N9K31/AV), constant pressure oil source and two single rod cylinders, the first cylinder (also called the main-cylinder) acted as the system to be controlled. In order to adjust the load force of the main-cylinder, the second cylinder was controlled by the proportional relief valve (Rexroth DBEE10/5X-315YG24K31K4M) in real time. The mass block geometric centerline was coincided with the axis of the two single cylinders, and directly contacted with the surface of test bench.

Schematic diagram of the experimental platform.

Experimental system of the EHSS.
In order to verify the effectiveness of the proposed method, two sets of comparative experiments were carried out on the experimental platform, under the control of LADRC and PID, respectively. The PID controller parameters are set as
Figures 10 and 11 presented the comparative experiment results tracking the trapezoid instruction and the

Comparative experimental results tracking the trapezoid instruction: (a) LADRC and (b) PID.

Comparative experimental results tracking the sinusoidal signal: (a) LADRC and (b) PID.
Figure 10 showed that the proposed method can follow the reference trajectory so precisely that the two curves were almost indistinguishable. In the transient region, the maximum tracking error was only 1.5 mm. Furthermore, there was no change in the steady state error under the external disturbance, and the absolute value of steady state error was no more than 0.5 mm. In contrast, under the control of PID, the maximum dynamic tracking error was about 3 mm, and the steady-state error of the system exceeded 1 mm, under the action of external disturbance.
Similarly, Figure 11 showed that, under the control of the proposed method, the tracking error was reduced instead, even the disturbance frequency increased significantly. The corresponding results have a good agreement with the theoretical analysis and simulation.
The results indicate that the proposed method can improve the tracking performance of EHSS, and achieve high-precision and smooth position control, due to the disturbances effective estimation and compensation. It is worth emphasizing that, the proposed control methods LADRC is independent of exact mathematical model, and the system information is only corresponded with the outputs of the displacement. Thus, the implementation of the developed algorithm in practice is rather convenient.
Conclusion
In this paper, a LADRC strategy with an acceleration feed-forward has been proposed and successfully implemented in EHSS to track the desired trajectory. The closed-loop system stability was proved. Through simulation, the influencing rule of the LADRC parameter variation on the control system performance was obtained.
Relationship between the LESO bandwidth and the state estimation accuracy was analyzed. The feasibility and effectiveness of the proposed method was verified by means of simulation and experiment. Compared with the general PID control, the nonlinear uncertainty disturbances in the EHSS can be effectively suppressed by the proposed method, and fast and accurate trajectory tracking can be realized. The following conclusions can be drawn based on the researches.
The proposed method can be easily used in engineering application and the structure of the controller is simple. In the proposed method, minimal priori information of the EHSS is required, the unknown dynamics and disturbances of the plant can be actively estimated and compensated by the third-order LESO.
The parameters such as the estimate value
When the bandwidth of the observer increases, the estimated accuracy of the state observer will increase gradually, but when the bandwidth exceeds the critical value, the estimated accuracy of the state observer will decrease on the contrary because of the influence of the noise, and the bandwidth of the observer needs to be adjusted backwards correspondingly.
Footnotes
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This work is supported by the Open Research Fund of State Key Laboratory of High Performance Complex Manufacturing, Central South University (No. Kfkt2018-13), Shanxi Province Major Science and Technology Projects (No. 20191102009), and the Doctoral Scientific Research Foundation of Taiyuan University of Science and Technology (No. 20202043).