
Abstract
Due to the complex and changeable train operation environment and the unstable and time-varying parameters, accurate modeling is limited. Therefore, a modified active disturbance rejection control algorithm based on feedforward compensation (FC-MADRC) is proposed targeting the speed control problem of trains under the circumstances of external disturbances, which reduces the dependence on the train model. Firstly, the state space equation is established based on the single-particle mathematical model of the train, and all the running resistances are regarded as disturbances. Secondly, the FC-MADRC algorithm is designed. Based on the terminal attractor function and the novel Sigmoid function, an improved tracking differentiator (ITD) is designed. An improved fal (nsfal) function with better smoothness is constructed by using the properties of the Dirac δ function, and an ameliorative nonlinear state error feedback (ANLSEF) and a modified extended state observer (IESO) are designed based on the nsfal function. Furthermore, based on the thought of PID, the integral term of error is introduced into ANLSEF for the nonlinear operation to reduce the steady-state error of train speed tracking. In order to promote the robustness and control accuracy of the system, the feedforward compensation term and disturbance compensation term are combined to perform dynamic compensation for disturbances in real time. Finally, the simulation is carried out with CRH380A train data. The results indicate that compared with conventional ADRC and 2DOF-PID, FC-MADRC has the more vital anti-disturbance ability and higher tracking accuracy. FC-MADRC has the advantages of solid anti-disturbance, fast response, and high tracking accuracy. Under the premise of external disturbance, it can still achieve accurate speed tracking under different road conditions.
Keywords
Introduction
As a fast, economical, stable, and safe mode of transportation, China's high-speed railway has developed rapidly in recent years. 1 By the end of 2022, the mileage of high-speed railways reached 42,000 km in China. At the end of 2019, Beijing-Zhangjiakou high-speed railway was opened, and automatic driving of the 350 km/h high-speed railway was realized for the first time. The application of automatic train operation (ATO) technology can improve operational efficiency, reduce energy consumption, reduce the burden on drivers, and improve the riding experience of passengers. 2 As one of the critical subsystems of the train control system, the ATO system (as shown in Figure 1) is responsible for controlling the braking and traction of high-speed trains (HST). Its most essential function is to control the velocity of HST, which is the basis for realizing the transportation security and automatic operation of HST. 3 Therefore, it is essential to comprehend how to apply the ATO system to realize train velocity tracking in complicated environments.
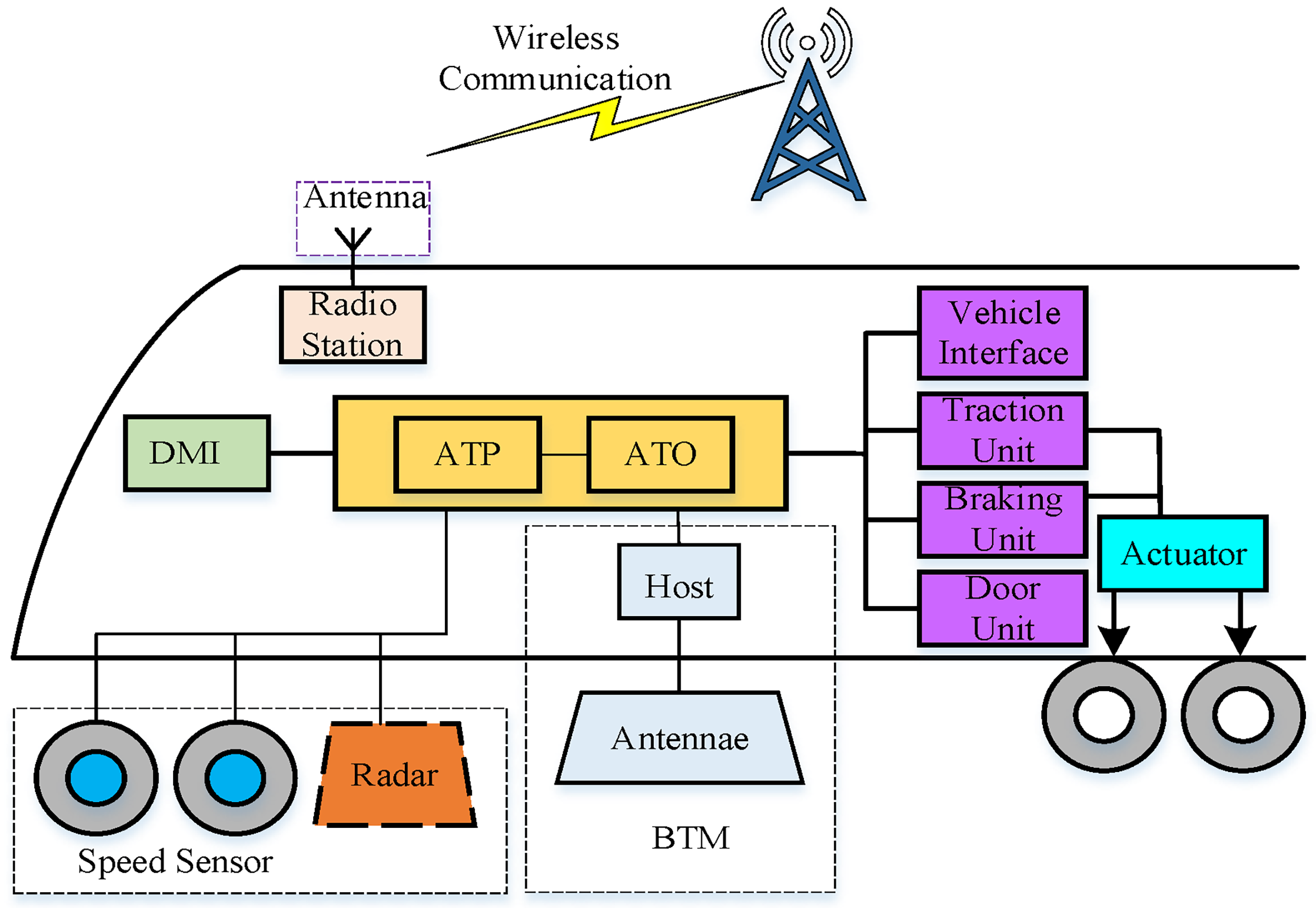
Principle block diagram of ATO for high-speed train.
In recent years, the ATO algorithm has attracted extensive attention from scholars in engineering and academic fields. PID control was used based on intelligent optimization algorithms to control the velocity of the train.4–6 In Ref. 7 , a train speed control algorithm was proposed based on fractional order PID, improving comfort. The PID algorithm performs the speed tracking better and achieves a minor tracking error. However, it has poor robustness, anti-disturbance ability, and comfort in complex environments such as significant differences in vehicle parameters and external strong disturbance. Because fuzzy control has the advantages of good robustness and being easy to understand, and the design of fuzzy rules can be integrated into the prior human experience, many train control methods combined with fuzzy logic have emerged.8–12 However, the establishment of fuzzy rules and membership functions relies too much on engineering experience, and it is not easy to adapt to the complex and changeable operating environment, which is not conducive to real-time tracking. MAO et al. 13 proposed a new adaptive fault-tolerant sliding mode control scheme considering disturbance and actuator failure. Although sliding mode control14–18 has a good tracking effect, it can easily produce a chattering phenomenon. Although some correction methods, such as the saturation function method, can effectively reduce the chattering phenomenon, they will sacrifice the advantage of outstanding anti-disturbance performance. In Ref. 19 , a nonlinear model predictive control algorithm was designed to track the velocity curve accurately. In Ref. 20 , an improved Smith prediction method was applied to improve the tracking ability of deceleration. Although the above two methods can improve the control quality, the dependence on the accurate model needs to be lowered. Although the above two methods can improve the control quality, they rely too much on accurate models. In Ref. 21 , an iterative learning method was used to track the desired speed curve of the train. This method improves the multi-point tracking accuracy by using the repeatability of the train motion and does not depend on the accurate model of the system. However, it has the disadvantages of blind selection of control law parameters and weak resistance to random non-repetitive disturbances. Yuan et al. 3 considered stochastic disturbances and adopted the adaptive control strategy to track the speed gradually, which improved the robustness and transient performance of the train.
The above control methods have a satisfactory control effect. However, most control strategies are cumbersome to design, accurate models need to be constructed, and the anti-disturbance ability needs to be improved. The interference in the train operation environment is unknown and complicated, and the train has nonlinear characteristics. Accordingly, it is unrealistic to construct a precise mathematical model. It is imperative to devise a speed-tracking controller that does not rely upon the precise model and has high precision and strong anti-disturbance ability. HAN proposed an active disturbance rejection control (ADRC) formally based on the thought of error feedback of PID, 22 which has been widely used in various fields23–27 due to its excellent control performance. In Ref. 28 , aiming at the shortcoming of poor robustness of traditional PID under strong disturbance, the traditional ADRC was used for train speed control, which has the advantages of strong disturbance resistance and high tracking accuracy. In Ref. 29 , the improved particle swarm optimization algorithm was used to optimize the parameters of ADRC, which solved the problem of difficult parameter debugging. Aiming at the time delay problem of maglev train, Wang et al. 30 decomposed and optimized the ADRC structure and gave the parameter adjustment method under the equivalent model, which realized the accurate tracking of speed in different road sections. Liu et al. 31 used BP neural network to adjust ADRC parameters adaptively and applied it to the speed control of a permanent magnet maglev train, which improved the robustness, stability and accuracy.
However, for the above ADRC train control method, the nonlinear function structure in the tracking differentiator (TD) is too complex, and the flutter phenomenon will exist by using the sign function. Although the fal function used in the extended state observer (ESO) is continuous, it is not derivable at the segmentation point and has no good smoothness. The derivative mutation will reduce the robustness of the observation system.
In summary, aiming at the speed control problem of trains running in complex environments and the defects of traditional ADRC, we design an improved active disturbance rejection speed controller for trains based on feedforward compensation (FC-MADRC) to ensure that the train can track the desired speed stably and accurately under the influence of various additional resistances and external disturbances. TD is improved by using an improved Sigmoid function. An ameliorative nonlinear state error feedback law (ANLSEF) and an improved ESO (IESO) are designed by using a smooth new fal function. To further improve the robustness of the system, feedforward compensation is added. Finally, the effectiveness of the improved ADRC for train speed control is verified by MATLAB.
Control mathematical model of the train
The train is affected by traction, braking force, additional resistance, and basic resistance. According to the single particle model of the train (as shown in Figure 2), the train control model is established as follows
32
:


Force diagram of a high-speed train in longitudinal motion.
According to Eq. (1), the train state equation is:



The control objectives of this paper are as follows:
For system (2) with external disturbance, the ITD is designed to arrange the transition process, and the IESO is constructed to observe the total disturbance in real time. An improved ADRC control algorithm based on feedforward compensation is designed to realize the accurate tracking of the expected speed of the high-speed train under external disturbance and complex road conditions.
Design of FC-MADRC speed controller
The control structure of FC-MADRC is shown in Figure 3, which mainly includes:
ITD: improved tracking differentiator based on the terminal attractor function and the modified Sigmoid function. IESO: improved extended state observer based on a new smooth approximation function of the fal function. ANLSEF: ameliorative nonlinear state error feedback law introducing error integral term and new smooth approximation function of the fal function. FC: feedforward compensation.
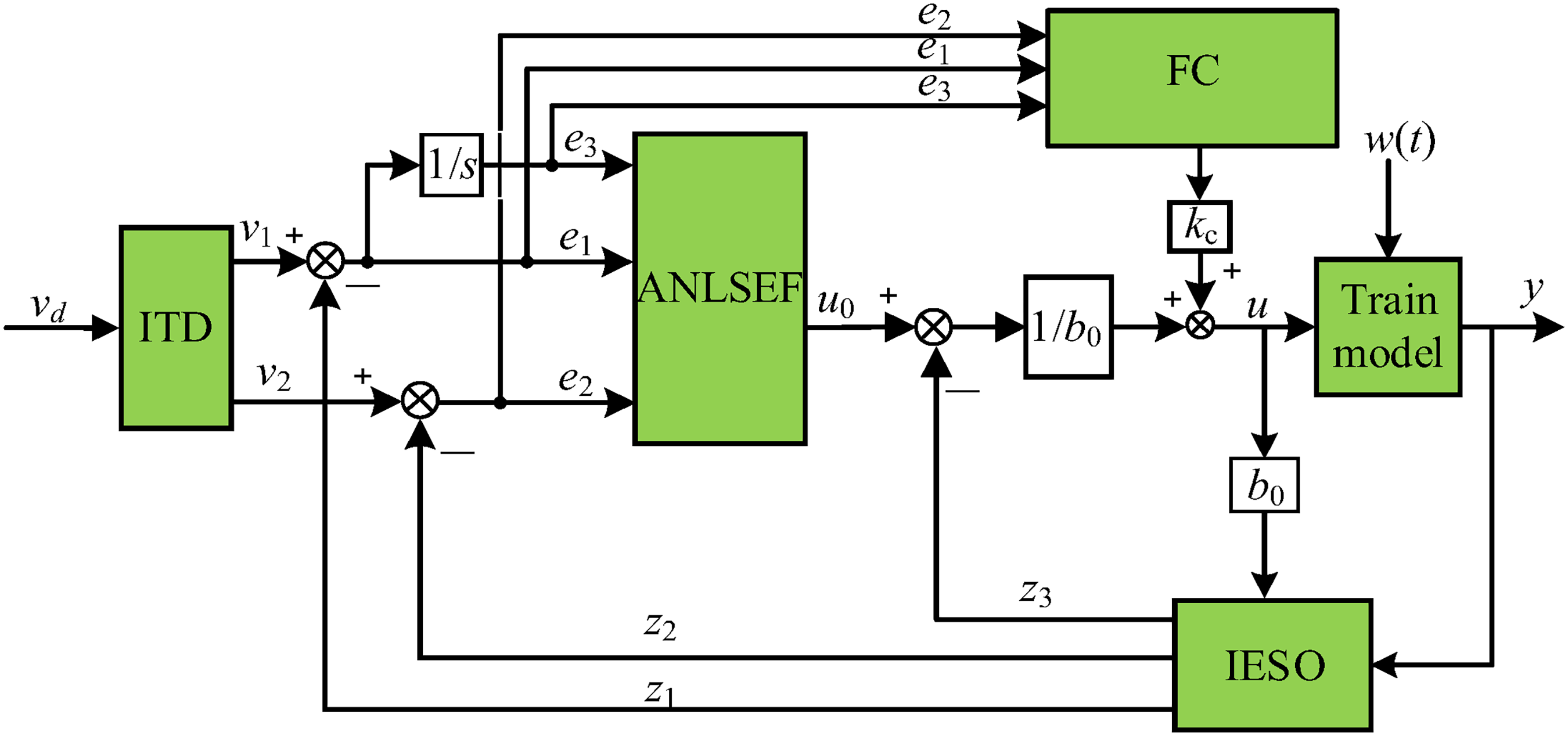
Structure diagram of FC-MADRC.
Novel tracking differentiator design
Improved sigmoid function
The classical nonlinear TD (NLTD) and linear TD (LTD) in Eqs. (5) and (6) are as follows, respectively.


The sigmoid function
35
is often used as the activation function of the neural network, which has the characteristics of smoothness, boundedness, and monotonicity. The Sigmoid function is improved by introducing an exponential factor to adjust the width of the approximate linear interval. The expression of the improved Sigmoid function is given:



Novel tracking differentiator

If the solution of Eq. (11) satisfies



The specific form of the function g (·) in Eq. (11) is designed as follows:

Given system ∑2

System ∑2 is globally asymptotically convergent at the equilibrium point (0,0).
Select


Only when z1 = 0, z2 = 0, then V (z1, z2) = 0. Finding the derivative of Eq. (17) yields

Based on Lemma 1 and Theorem 1, an improved tracking differentiator (ITD) in the following discrete form can be obtained.

Firstly, select the appropriate value of a. Secondly, the value of ϑ is placed at a smaller value, and then after adjusting the appropriate R, κ1 and κ2 are fine-tuned to adjust the differential and tracking effects. Finally, the value of ϑ is adjusted to achieve the optimal noise suppression capability of the system.
ITD exhibits linear characteristics when the state is close to the equilibrium point, which can weaken the chattering. It exhibits nonlinear characteristics when the state is far from the equilibrium point, which can accelerate the convergence speed.
To verify the improved performance of ITD, it is compared with LTD and NLTD when the speed factor R is the same. In Simulink, the “Repeating Sequence” module is applied to generate a triangular wave signal, and the “Sine Wave” module and “Sign” module are employed to generate a square wave signal. Ulteriorly, they are used as the input signal of TD for simulation. The “Band-Limited White Noise” module is adapted to generate a white noise signal and is added to the input signal to verify the filtering ability of ITD. In the noise module, the parameter values of noise power and sample time are set to 10−10 and 0.001, respectively. The mean value of the noise signal generated by the band-limited white noise module is zero.
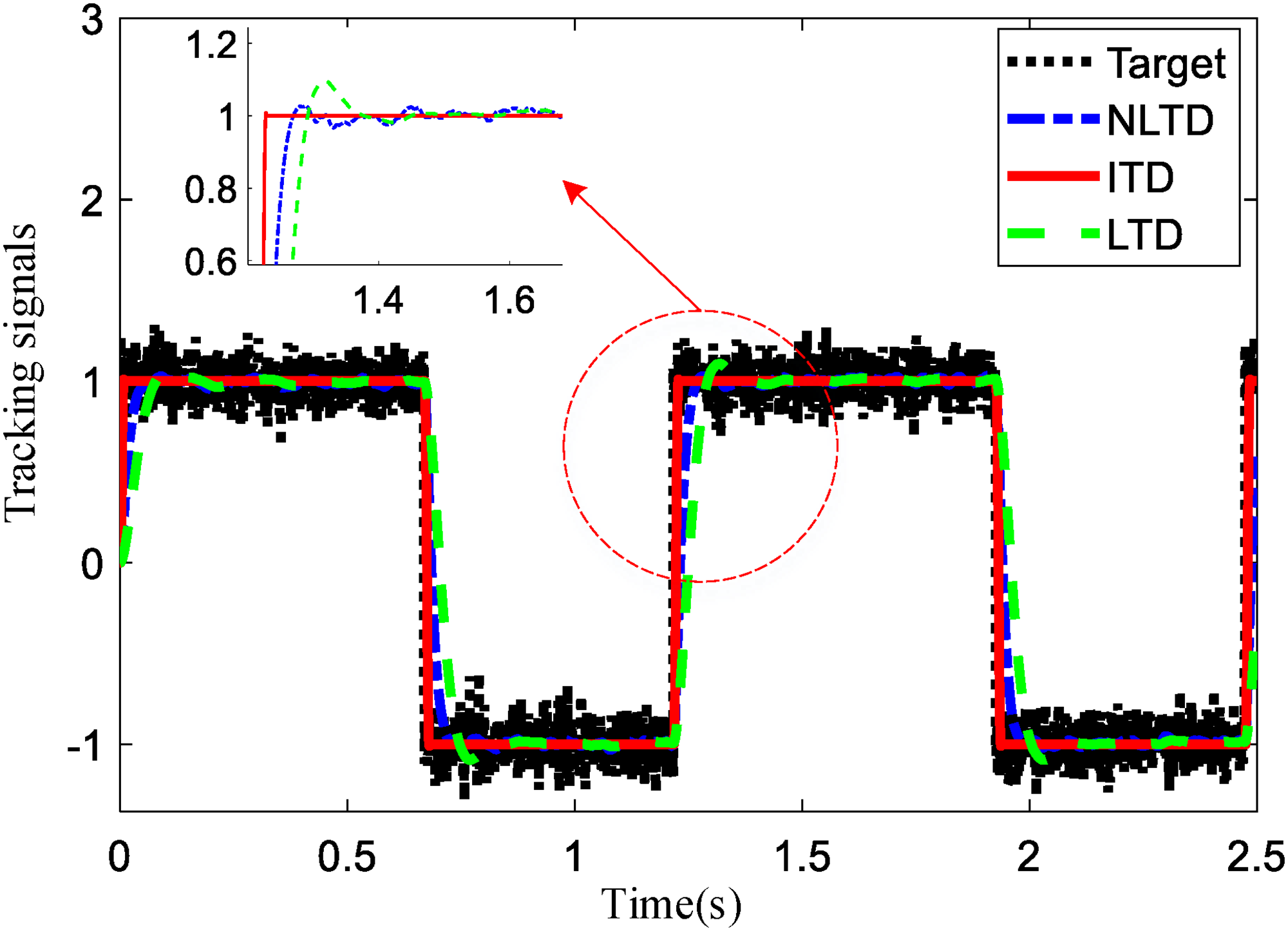
When the input signal is a triangular wave, the performance comparison of various TDs is shown in Figures 4 and 5. It can be seen from Figure 4 that ITD has the highest tracking accuracy while LTD has the worst tracking performance. From Figure 5, we observe that NLTD produces obvious chattering due to the use of the sign function. Compared with NLTD, LTD has slightly smaller chattering but noticeable overshoot and the slowest response speed. ITD has the smoothest differential signal and the fastest response speed, showing good differential and filtering performance. The noise suppression ability of ITD is the best because the acceleration function of ITD is designed by a continuous function, and the addition of a terminal attractor function further suppresses the effect of noise.

Comparison of tracking effect when the reference input is triangular wave.

Comparison of differential effect when the reference input is a triangular wave.
When the input signal is a square wave, the power spectral density of white noise is increased, and the parameter value of Noise power is set to 10−5. The performance comparison of various TDs is illustrated in Figures 6 and 7. It can be observed from Figure 6 that ITD also has a good filtering effect on the tracking signal, and ITD achieves fast-tracking of the square wave signal with almost no overshoot. From Figure 7, we observe that the differential signal of ITD has almost no chattering. In summary, the ITD we designed in this paper has good tracking and differentiation performance, as well as noise suppression ability.
Comparison of tracking effect when the reference input is a square wave.

Comparison of differential effect when the reference input is a square wave.
Novel extended state observer
The extended state observer (ESO) is the core of ADRC, which is mainly used to estimate the total disturbance. Linear ESO (LESO) has an inherent peak effect, and ESO designed by Professor Han Jingqing can achieve smoother and more accurate total disturbance estimation by introducing a nonlinear function fal (·) to better suppress the peak effect. The ESO expression based on the fal function is:


Novel fal function
The characteristics of nonlinear functions in ESO directly affect its observation performance, which in turn affects the performance of the control system. The selection of nonlinear functions should follow the following principles
37
:
The function is symmetrical about the origin and can be derived everywhere. The curve has good continuity, convergence, and smoothness. Large gain is used when there is a small error, and small gain is used when there is a large error.
Although the fal function is continuous, it is not derivable at the segmentation point and has no good smoothness. The abrupt derivative will reduce the robustness and observation ability of the observation system.
Given the above problems, we use the Dirac δ function
38
widely used in physics to smooth the fal function. The Dirac δ function is a generalized function, proposed by the German mathematician G.Dirac, which is commonly used in physics to represent the density distribution of ideal models such as particle and point charge. The Dirac function satisfies the following condition:







Function characteristic curve.

Error gain curve.
Novel ESO based on nsfal function
By replacing the fal function in (21) with nsfal function, the form of improved ESO can be obtained:



Influence of the value of β03 on the performance of disturbance estimation.
Analysis of convergence conditions of improved ESO
When the external disturbance is not considered, the observation error equation is obtained by combining Eqs. (4) and (29) as follows:


The Lyapunov function is constructed as follows:



The following step input signal is used to preliminarily verify the improvement effect of the improved ESO (IESO). Under the premise that the gain coefficients are the same, the traditional ESO and IESO in Eqs. (21) and (29) are compared. The comparison of disturbance observation results for different ESOs is illustrated in Figure 11. It can be observed that IESO has a faster disturbance estimation speed and smaller error peak compared with traditional ESO. All in all, IESO has better disturbance estimation performance.

Comparison of disturbance estimation performance for different ESOs. (a) Disturbance estimation; (b) Estimation error.
Design of improved nonlinear state error feedback
The nonlinear state error feedback (NLSEF) of traditional ADRC is:


Design of feedforward compensation
The system is transformed into an integrator series structure when the conventional ADRC can accurately estimate the total disturbance. However, there may be estimation errors in practice, resulting in disturbance in the double integrator structure. To improve the robustness and control accuracy of the system, a feedforward compensation term is added to the disturbance compensation control u1 in (38) to further compensate for the disturbance in real-time, which can better suppress the internal and external disturbances. The feedforward compensation is designed as follows:


Simulation results and discussion
To verify the performance of the designed FC-MADRC, the CRH380A high-speed train is selected as the research object for simulation and comparison. The train parameters are shown in Table 1.
Basic parameters of CRH380A train.

“-” represents no unit
The state space equation of the CRH380A train is:



Step response and sinusoidal response are shown in Figure 12 and Figure 13, respectively. From Figure 12, we observe that the overshoot of 2DOF-PID is more significant, and the response speed of FC-MADRC is faster than that of ADRC in the case of almost no overshoot. Figure 13 demonstrates that FC-MADRC can track sinusoidal signals well with the most negligible phase lag, while 2DOF-PID has a considerable phase lag.

Step response.

Sine response.
The speed tracking curve and speed error are shown in Figure 14 and Figure 15. FC-MADRC can better track the target speed curve, and its minimum speed tracking error is almost close to zero. The speed error range of 2DOF-PID is the largest. When the train enters the uphill ramp at 400 s, it begins to be subject to additional ramp resistance, which is equivalent to the introduction of step disturbance. At about 400 s: the maximum speed tracking error of FC-MADRC is about 0.005 km/h, which is the smallest of the three, and the speed tracking error of 2DOF-PID is about 0.553 km/h, which is the largest, indicating that FC-MADRC has the best anti-disturbance ability, while 2DOF-PID has the worst anti-disturbance ability. Similarly, during the 1000–2400 s period, the train is subject to other resistances, equivalent to introducing a sinusoidal disturbance with an amplitude of 50. From the time of 1000 s, the speed error of 2DOF-PID and ADRC begins to increase obviously, while the speed tracking error of FC-MADRC is still the smallest and has no noticeable change, which further shows that FC-MADRC has the best anti-disturbance performance.
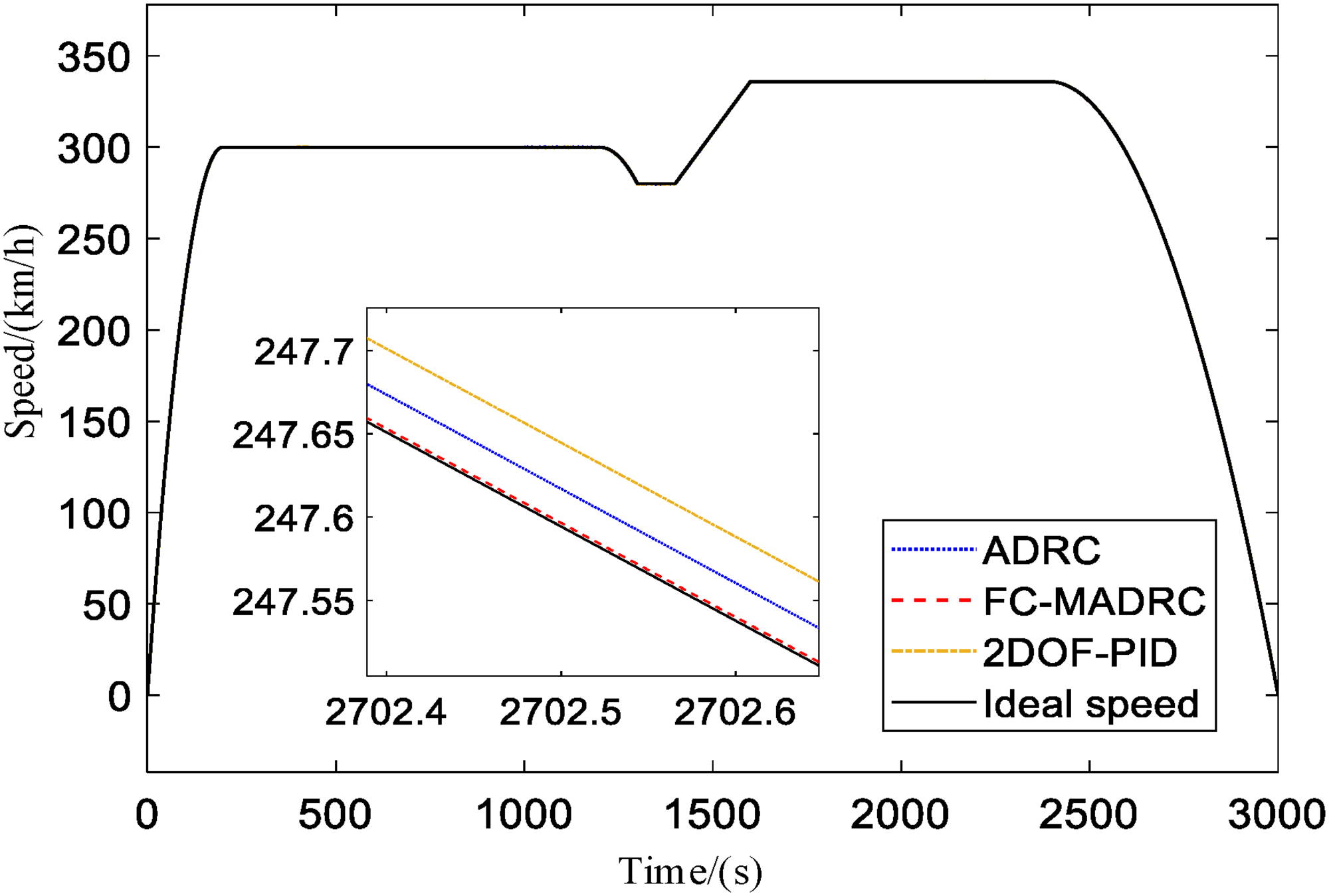
Speed tracking curve.
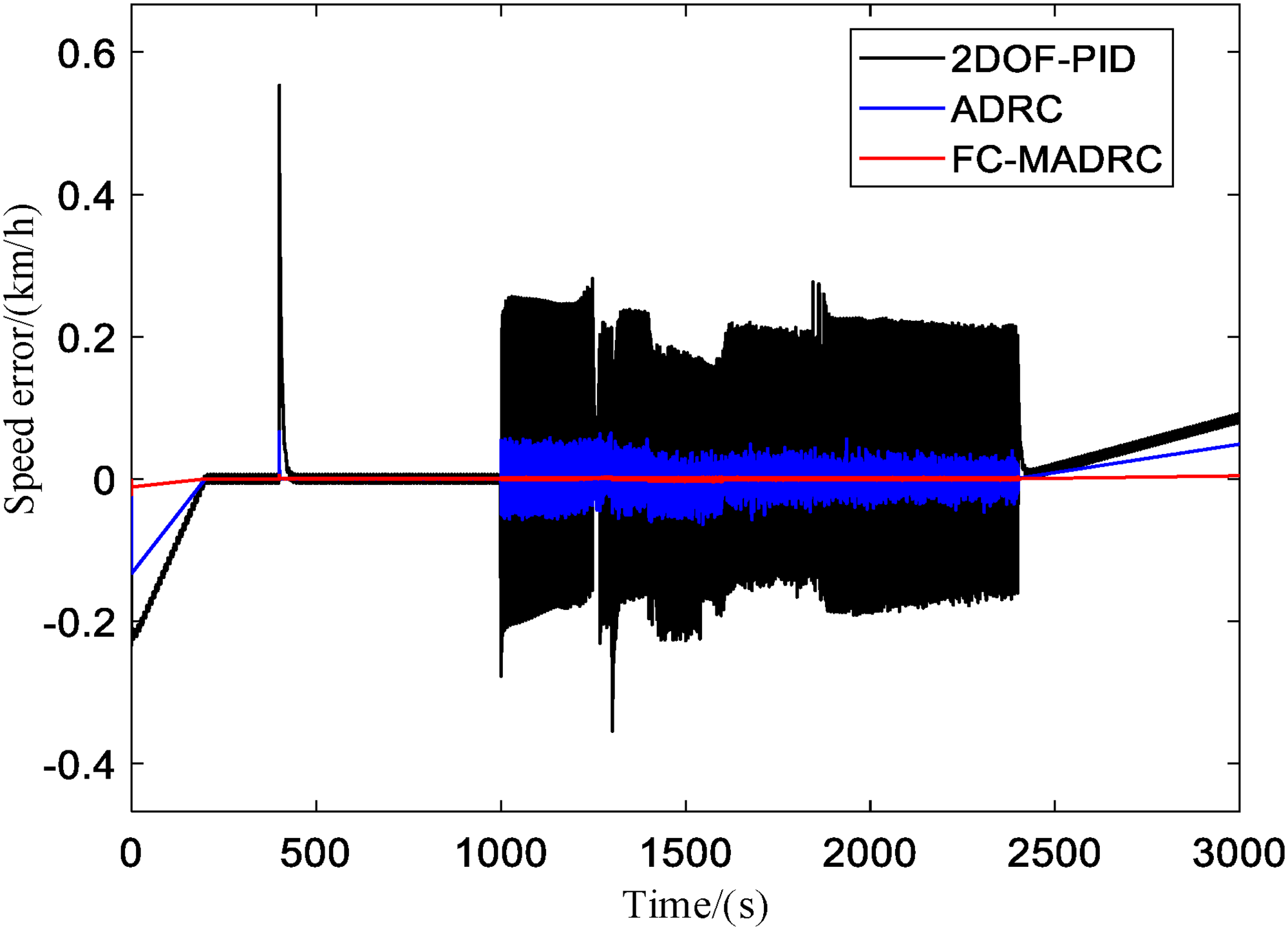
Speed tracking error curve.
Figure 16 and Figure 17 illustrate the displacement tracking curve and displacement error. The minimum convergence range of displacement error of FC-MADRC is close to zero, and the maximum range of displacement error of 2DOF-PID is in the range of (−24.5 m, + 3.1 m). The displacement tracking error of the train at the last moment reflects the parking accuracy to a certain extent. At 3000 s: the displacement error of 2DOF-PID is 3.031 m and is not within the error range of ± 0.5 m, while the displacement errors of ADRC and FC-MADRC are 0.00473 m and 0.00033 m, respectively, which are close to zero and can meet the requirements of precise parking. The error of FC-MADRC is slightly smaller.
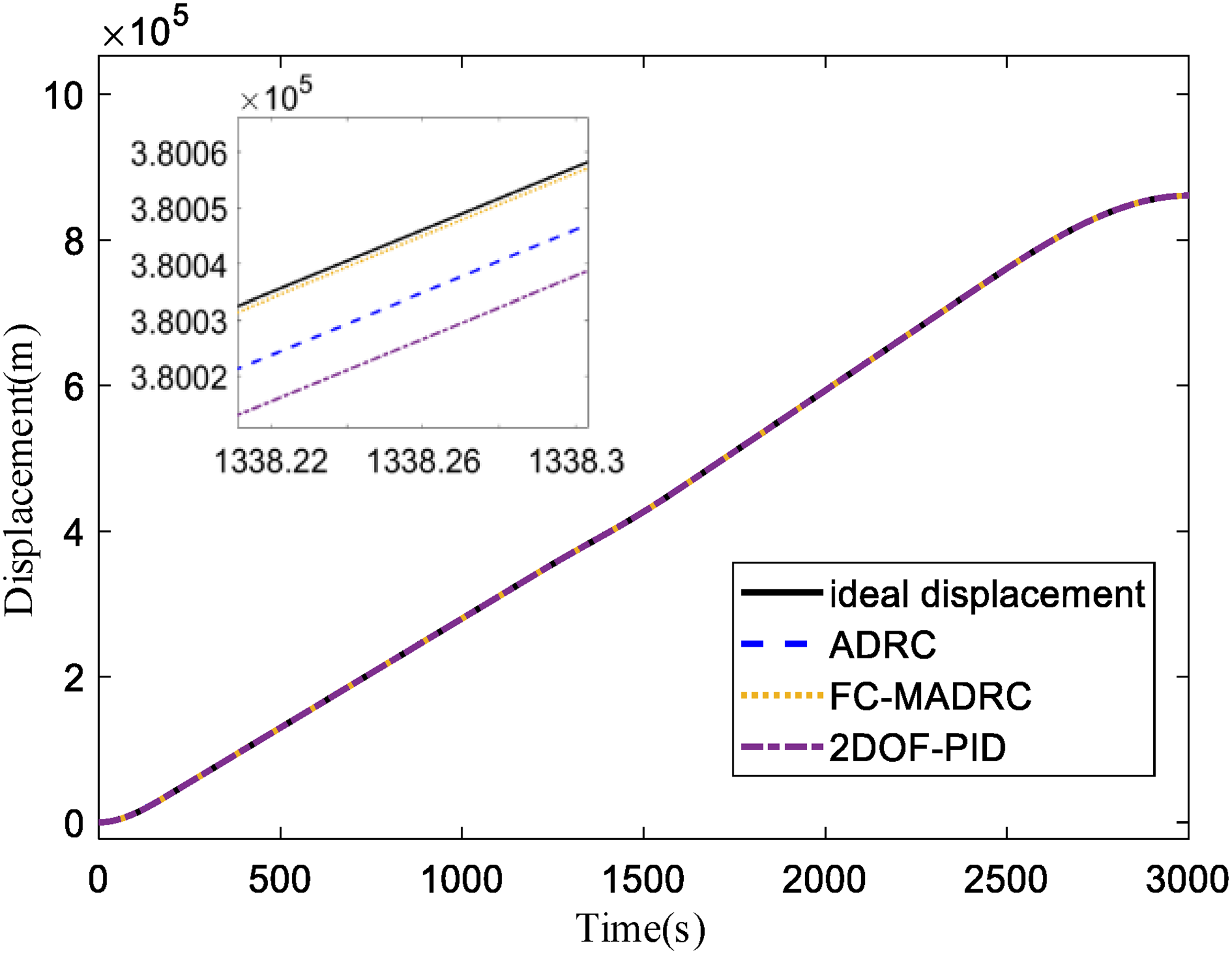
Displacement tracking curve.

Displacement tracking error curve.
To quantitatively measure the control effect of FC-MADRC, root mean square error (RMSE), integral of absolute error (IAE), and integral of absolute error multiplied by time (ITAE) were selected for comparison. Each speed error index is shown in Eqs. (46)-(48).


Comparison of error velocity indexes.

Conclusions
Due to the complex and changeable train operation environment, and unstable and time-varying parameters, the accurate modeling is limited, which makes the traditional PID control algorithm challenging to adapt. Therefore, an improved active disturbance rejection control algorithm based on feedforward compensation (FC-MADRC) is proposed targeting the speed control problem of trains under external disturbances, which effectively improves the speed tracking control performance.
The effectiveness of FC-MADRC is verified through MATLAB simulation tools. Compared with 2DOF-PID and ADRC, the improved control strategy improves the anti-disturbance ability and tracking accuracy. This control method can not only ensure the accurate tracking of train speeds, but also meet the requirements of accurate parking.
FC-MADRC has the advantages of strong anti-disturbance, fast response, and high tracking accuracy. Under the premise of external disturbance, it can still achieve accurate speed tracking under different road conditions, which can provide a reference for the engineering application of ATO speed control.
Footnotes
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/ or publication of this article: This work was funded by Science and Technology Research & Development Plan Project of China National Railway Group Co., Ltd (grant number N2021G045) and Foundation of A Hundred Youth Talents Training Program of Lanzhou Jiaotong University (grant number 1520220321).
Author biographies
Lili Yue received the M.S. degree from Lanzhou Jiaotong University, Lanzhou, China, in 2008, where she is currently pursuing the PhD degree. She is currently a Lecturer at the School of Automation and Electrical Engineering, Lanzhou Jiaotong University. Her research interest includes traffic information engineering and control.
Yidong Wang received the B.S. degree from the Lanzhou Jiaotong University, Lanzhou, China, in 2019, where he is currently pursuing the M.S. degree. His research interest includes active disturbance rejection control and automatic train control.
Baodi Xiao received the B.S. degree from Lanzhou Jiaotong University, China, in 1987, and the M.S. degree from the China Academy of Railway Sciences, in 2003. He was the deputy director and researcher of the Communication and Signal Research Institute of the China Academy of Railway Sciences, from 2002 to 2015. He was awarded the National Science and Technology Progress Award, in 2002. Currently, he is the Chairman of Beijing Consen Traffic Equipment Co., Ltd, China. His research interests include intelligent control of traffic information systems.
Yiqing Wang received the B.S. degree from the Lanzhou Jiaotong University, Lanzhou, China, in 2019, and the M.S. degree from Lanzhou Jiaotong University, China, in 2022. He is currently an engineer with China Railway Xi’an Bureau Group Co., Ltd, China. His research interest includes train operation control.
Junting Lin received the M.S. degree from Beijing Jiaotong University, Beijing, China, in 2008, and the PhD degree from Lanzhou Jiaotong University, China, in 2018. From 2011 to 2012, he was a visiting scholar in College of Transportation Engineering, Tongji University, China. He has participated in more than 10 research projects funded by National Natural Science Foundation of China and China Railway. He is the author of more than 40 papers published in international journals or conference proceedings. He is currently the director of Department of Rail Transit Signal and Control, a Professor with the School of Automation and Electrical Engineering, Lanzhou Jiaotong University. His research interests include obstacle conflict prediction and security protection based on autonomous perception, intelligent control and autonomous operation technology of rail transit trains.