
Abstract
In this study, a preview repetitive control (PRC) strategy was developed for uncertain nonlinear discrete-time systems subjected to a previewable periodic reference signal. The proposed preview repetitive controller was designed such that the system output tracked a previewable periodic reference signal even with model uncertainties and nonlinear terms. An augmented two-dimensional (2D) model was constructed based on the 2D model approach and state augmented technique. Second, considering the state unmeasured and periodic tracking reference signal, a static output PRC law was designed using the linear matrix inequality (LMI) techniques. Finally, the effectiveness of the proposed controller was verified through two illustrative examples.
Keywords
Introduction
In a controller, tracking control is used to drive the output of the system toward the desired reference signal as accurately as possible. Preview control (PC) is an advanced control method, in which the future information of the reference signals is used to improve tracking quality.1,2 Since PC was first proposed, 3 numerous PC techniques such as optimal PC,4–7 H2 optimization-based PC, 8 and H∞ PC9,10 have been developed. Most of these techniques are Riccati-equation-based design methods. Developing a robust PC problem using the LMI technique is the latest technology trend.11–16
The combination of PC and other theories to solve problems has attracted considerable attention. For example, a PRC strategy of control systems has been devised17–20 using the 2D model approach and the state augmented technique. Studies21–24 have investigated the problem of PC for nonlinear systems based on the augmented error system and LMI techniques. A data-driven robust fault-tolerant PC scheme was designed for discrete-time systems. 25 A modified PC strategy was proposed 26 to realize wireless tracking control.
Many studies have focused on PC design and analysis for discrete-time systems or robust PC for systems with uncertain items and disturbance signals. However, the problems of PRC for discrete-time nonlinear systems with polytopic uncertainties have not been investigated. Repetitive control (RC) is a specialized control scheme for tracking and rejecting periodic signals.27,28 Thus, investigating the feasibility of using PRC when the reference signal is periodic and previewable is critical. Therefore, we proposed a novel control strategy to address the aforementioned problems. The PRC laws design methods for nonlinear systems are special cases of this paper. In comparison with the PRC design methods given in previous studies,17–20 the proposed results permit the system matrices to be noncommon and to exhibit nonlinear terms, which allows a wide range of objects.
This paper presents a method of PRC for uncertain nonlinear systems when the periodic reference signal is previewable. By using the 2D approach and the state augmentation technique, an augmented 2D system including previewable information was derived. An algorithm for a static output PRC and learning actions was designed. Finally, we performed numerical simulations to compare PRC and RC.
The key contribution of this paper can be summarized as follows:
An augmented 2D system without error signal is derived by a new construction method. This has two advantages: First, the order of the augmented error system and the amount of computation are reduced; Second, the output matrices of the considered uncertain system are allowed to be non-common and have uncertainties. A robust preview repetitive controller to guarantee output tracking control performance is designed by using the construction of the augmented plant including previewable information and learning ability and the robust controller synthesis using LMIs.
Problem statement
Consider the following nonlinear discrete-time system




We made the following assumptions.

Let




The repetitive controller can be expressed as follows:


In this section, we utilize the characteristics of RC and the methods of PC theory to construct an augmented system, which combines the error equation, the state equation of controlled system and the reference signal. Then, the required controller is designed by LMI technology.
Construction of the augmented 2d system
Let
From (1), (7), and (8), we have the following 2D representations:
























Substituting (18), (24), and (20) into (22), we obtain the following expression:













where















Based on Theorem 1, an LMI method is presented in the next theorem to design a PRC law as (33) to solve the PC problem for polytopic uncertain Lipschitz system (37).








From Lemma 1, (50) can guarantee

where

Let
that is,

where


In theorem 1, letting



Next, we can obtain (39) from (52). Thus, it follows from Theorem 1 that Theorem 2 holds.

Where


Next, the gain matrices are expressed by the following expression:


Based on (53), we determine that
Suppose that LMIs (53) have a feasible solution. Next,

From (34) and derivation, the gain matrices are obtained as follows:

Numerical example
Example 1
A flexible-link robot model is cited in.[22] The state-space model of the flexible-link robot control system (F-LRCS) is expressed as follows:



where
The output equation is expressed as follows:

By the sampling period

For comparison and analysis, RC and PRC were applied to F-LRCS. For the given
When




Output of F-LRCS with PRC with RC.

Tracking error of F-LRCS with PRC with RC.
Figure 3 shows the control input of F-LRCS. It illustrates that once the output vector of the system tracks the reference signal, the input vector basically remains unchanged or changes periodically, which is the same as the actual situation.

Control input of F-LRCS with PRC with RC.
The reference signal is as follows:

Output response of F-LRCS for signal (60).

Tracking error of F-LRCS for signal (60).

Control input of F-LRCS for signal (60).
Example 2
In system (1),




The gain matrices of PRC law with





Comparison of the output of system (1) with PRC with RC.

Tracking error of system (1) with PRC with RC.

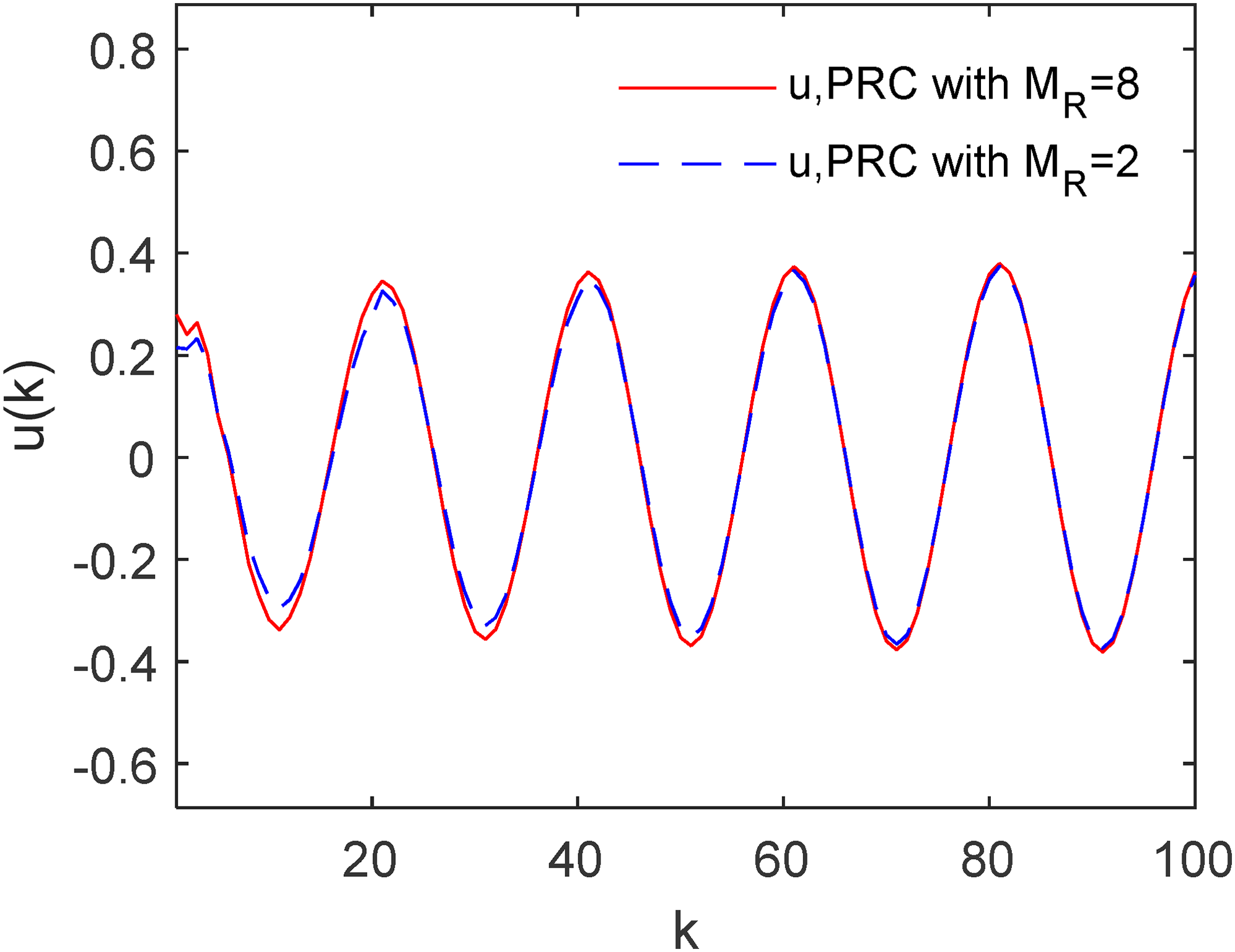
Control input of system (1) with PRC with RC.
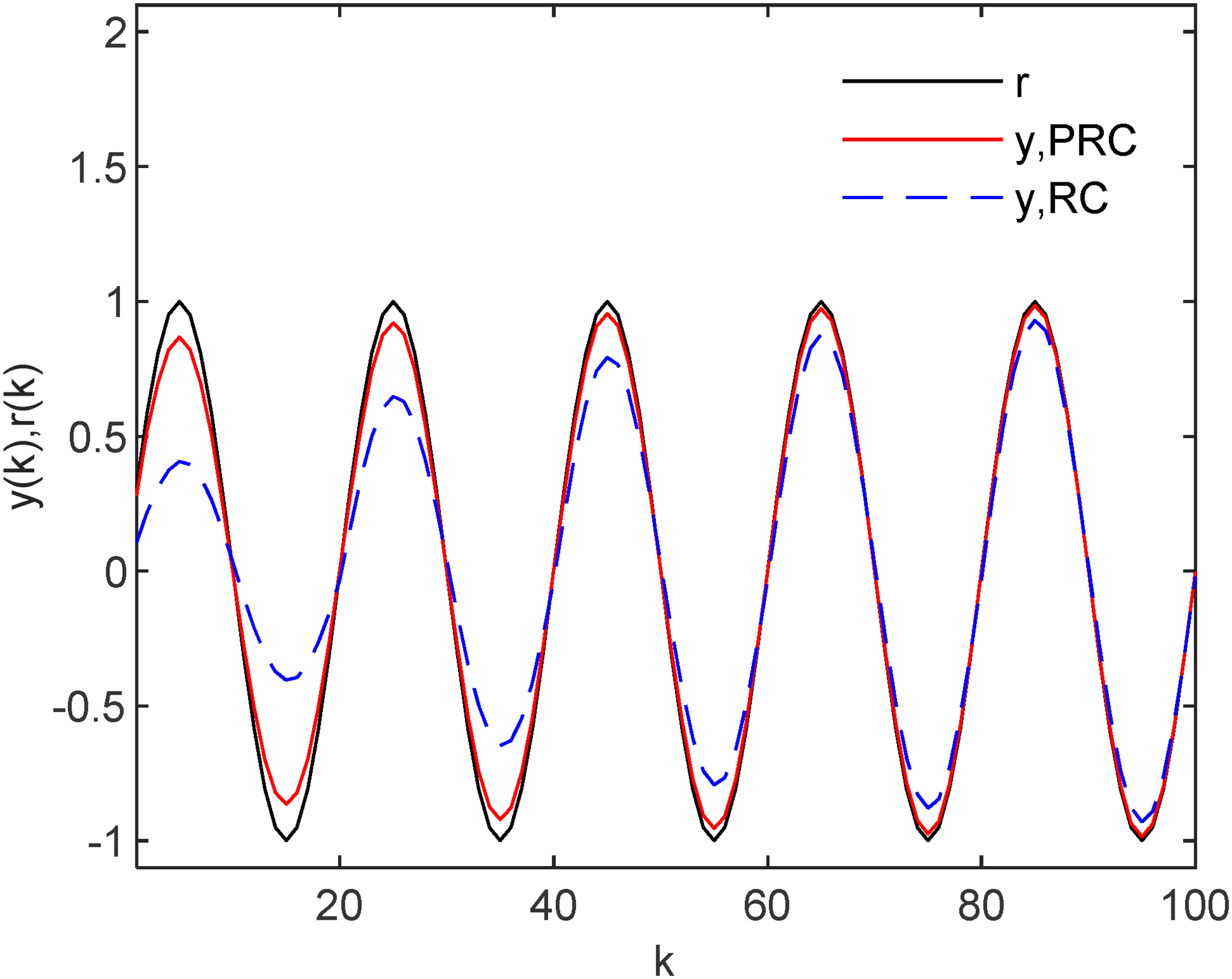
Furthermore, we investigated the effect of PRC and RC on the closed-loop system for signal (60). The simulation results are illustrated in Figures 10–12. Through the comparison with the RC (i.e. no preview), Figures 10 and 11 reveal that the output with PRC and RC can track the desired signal faster.

Comparison of the output response between PRC and RC.

Tracking error of system (1) between PRC and RC.
Control input of system (1) between PRC and RC.
This paper presented a method of designing a PRC law for a class of uncertain nonlinear discrete-time systems. The design problem of PRC is converted into the stability analysis of a nonlinear discrete-time 2D system by using the augmented model approach. Next, the Lyapunov functions method was used to derive sufficient conditions for the existence of a PRC law such that the tracking error converges to zero. The effectiveness of the proposed method was verified using two illustrative examples.
In future, one of the important research topics is to extend the present result to the discrete-time descriptor systems, which is more challenging due to the special structure of descriptor systems. And the issue of the PRC based on the techniques of sliding mode will be interesting and of great significance.
Footnotes
Acknowledgments
This work was supported by the National Natural Science Foundation of China [61903130]; Key Scientific Research Project of Hubei Department of Education [D20192202]; Hubei University of Economics Research And Development Project [PYZD202005, PYYB202007]; Shandong Provincial Natural Science Foundation [ZR2020QA036].
Declaration of Conflicting Interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This work was supported by the Shandong Provincial Natural Science Foundation (grant number ZR2020QA036); the National Natural Science Foundation of China [61903130]; Key Scientific Research Project of Hubei Department of Education [D20192202]; Hubei University of Economics Research And Development Project [PYZD202005, PYYB202007].