
Abstract
A negative stiffness mechanism consisting of a spring and cylinder is proposed, and a grounded dynamic vibration absorber is designed based on a quasi-zero stiffness vibration isolator to constitute the vibration isolator with a vibration absorber system. The range of parameters for attaining zero stiffness is derived from static analysis. The dynamic analysis of the vibration isolator with a vibration absorber system is carried out by a multiscale method, and the amplitude–frequency response equation of the system is obtained. The influence of different system parameters on the amplitude–frequency response is analyzed. The amplitude–frequency response of the quasi-zero stiffness vibration isolator is compared with that of the vibration isolator with a vibration absorber, and the linear and nonlinear analytical solutions of the vibration isolator with a vibration absorber system are also compared. The results show that the designed vibration isolator with a vibration absorber is an ideal choice for low-frequency vibration isolation, with no large resonance peak throughout the system and significantly improved reliability of the system.
Keywords
Introduction
With the improvement of living standards and material quality, people attach increasing importance to energy conservation and vibration reduction. The riding comfort of vehicles is associated with mechanical vibration, and precise instruments require the support device to have good vibration attenuation ability. In order to solve the above-mentioned vibration problems, vibration isolators or absorbers are usually used. In order to isolate vibration at low frequency, a quasi-zero stiffness vibration isolator is designed, but it still shows an extremely high resonance peak at the low-frequency band. If the excitation frequency is close to such a resonance frequency, the isolator system will be quickly unstable. In addition, a dynamic vibration absorber reduces the response amplitude greatly, but the effective frequency bandwidth is extremely narrow because of two new resonance peaks.
In recent years, in the field of vibration isolation, scholars have done a lot of research on quasi-zero stiffness vibration isolators. The negative stiffness mechanism composed of a tension spring and a connecting rod was designed and researched.1–3 Chai et al. 4 used a spring-cam-roller mechanism as the negative stiffness mechanism. Meng et al. 5 utilized a Belleville spring to compose a nonlinear quasi-zero stiffness vibration isolator. Meng et al. 6 studied the effect of increase of nonlinear damping on a quasi-zero stiffness vibration isolator. Wang et al. 7 proposed a two-stage quasi-zero stiffness vibration isolation system and built a segmented nonlinear dynamic model. Liu and Yu 8 added an auxiliary system to the vibration isolation system to reduce the transmissibility and jump phenomenon. Li et al. 9 proposed a negative stiffness mechanism based on hybrid bistable composite laminates. Liu et al. 10 studied the impact of Coulomb friction on a Euler buckling beam isolator. However, the issue of significant resonance peaks in the quasi-zero stiffness vibration isolator is not yet effectively resolved after years of development.
In the field of vibration absorber, a lot of research studies have been done from damping dynamic absorbers to grounded vibration absorbers with negative stiffness springs. 11 Zheng et al. 12 studied a nonlinear vibration energy absorber-based strategy for automotive active suspension. Zhao and Xu 13 designed a time-delay nonlinear dynamic vibration absorber for a vibration absorber in the controlled system. Dong et al. 14 applied a vibration absorber to a hub motor. Shen et al. 15 added inertial elements to traditional vibration absorbers and used them for automotive shock absorbers. Wang et al. 16 created a grounded three-element vibration absorber from viscous-elastic material. Javidialesaadi and Wierschem 17 proposed a three-element vibration absorber composed of two kinds of current passive devices. Shen et al. 18 brought forward a novel dynamic vibration absorber with a grounded stiffness unit and an amplifying mechanism.
There are many analysis methods for solving a nonlinear system. Nayfeh 19 and Nayfeh and Mook 20 proposed a perturbation method to analyze the nonlinear vibration problem and used the multiscale method to analyze the multi degree of freedom problem. Chen and Wu 21 simplified the analysis process by applying the averaging method to the nonlinear multi degree of freedom field. Li and Yang 22 used the multiscale method to analyze the nonlinear multi degree of freedom vibration of vehicle suspension. Kovacic et al. 23 used the nonlinear method to analyze the vibration isolator composed of a tension spring. Li et al. 24 used the mode superposition multiscale method to analyze the nonlinear dynamics. Mahdi and Bardaweel 25 used the harmonic balance method to analyze the dynamic performance of the vibration isolator.
In this work, the negative stiffness mechanism is designed by using the tension spring to make the vibration isolator achieve the purpose of low-frequency vibration isolation, but the strong resonance problem still exists. Therefore, a quasi-zero stiffness vibration isolator incorporating a grounded dynamic vibration absorber is designed to effectively reduce the resonance peak. By making good for deficiencies, the main system is kept away from high resonance peaks and shows reliability at any excitation frequency.
Static analysis of a mechanical system
As shown in Figure 1, the quasi-zero stiffness vibration isolator is composed of a negative stiffness part and a positive stiffness part. The negative stiffness part consists of the cylinder body 2, piston rod 3, and tension spring 4. The left end of the tension spring 4 is connected to the piston rod 3, while the right side is connected to the cylinder body 2. The tensile quantity
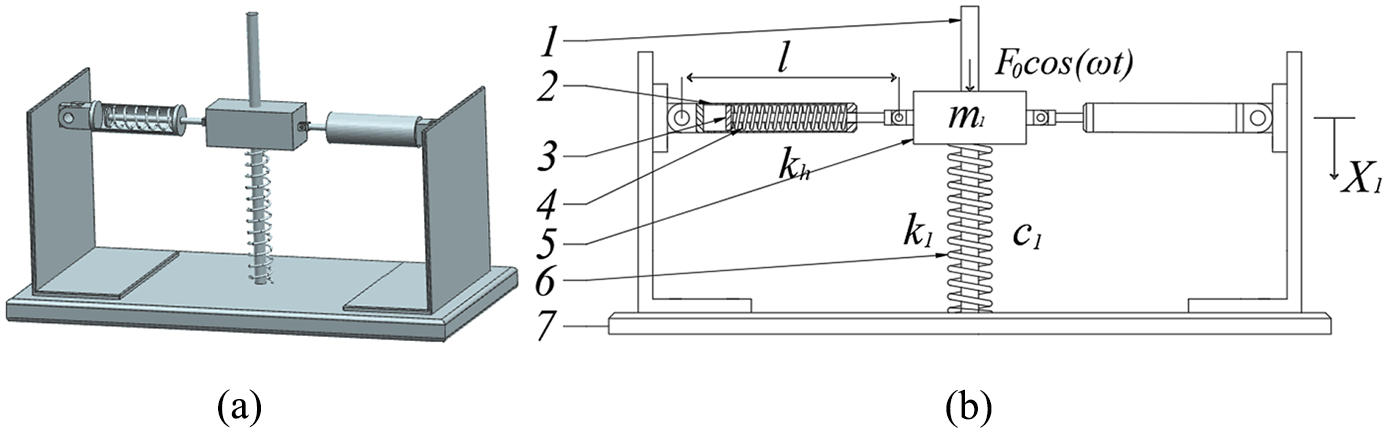
Schematic diagram of a tension spring quasi-zero stiffness isolator. (a) Three-dimensional modeling of a vibration isolator. (b) Schematic diagram of a vibration isolator.
Under the exciting force, the mass block

Let

When equation (2) is divided by x1, one can get the dimensionless stiffness of the isolator

Let

When condition (4) is met, the vibration isolation system has quasi-zero stiffness.
From equations (2) and (3), the restoring force–displacement curves of an isolator can be obtained with different Coulomb frictions
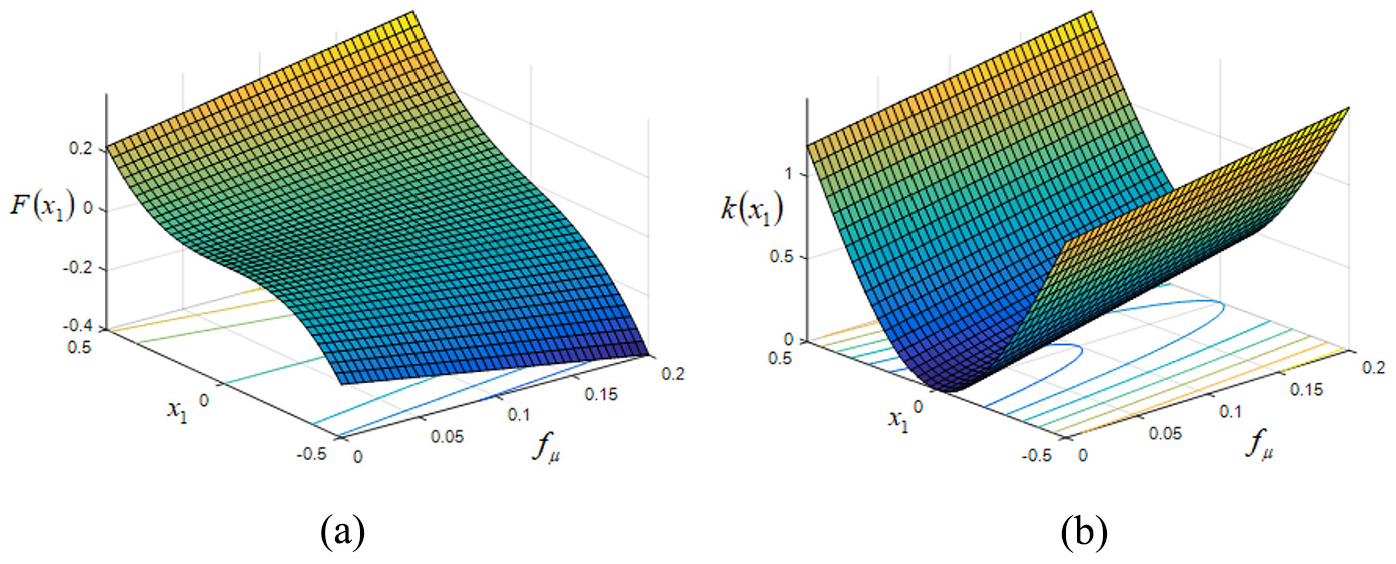
The dimensionless restoring force and stiffness diagram of a negative stiffness mechanism with different Coulomb frictional forces. (a) Dimensionless restoring force displacement. (b) Dimensionless stiffness displacement.

The dimensionless restoring force and stiffness diagram under different pre-tension quantities. (a) Dimensionless restoring force displacement. (b) Dimensionless stiffness displacement.

The dimensionless restoring force and stiffness diagram for stiffness ratios. (a) Dimensionless restoring force displacement. (b) Dimensionless stiffness displacement.
The simplified form 26 of equations (2) and (3) can be obtained by the Taylor expansion


where
From Figures 2–4 and equations (5) and (6), it can be noted that the dimensionless force of the system is an odd function, while the dimensionless stiffness is an even function.
Figure 5 gives a comparison between the Taylor expansion and the original expression. Figure 5(a) shows the restoring force property obtained from equations (5) and (2). Figure 5(b) shows the stiffness property obtained from equations (6) and (3). It is clear that the result of the Taylor expansion coincides with that of the original expression when the displacement is small, so the Taylor expansion in (5) and (6) is able to respect the quasi-zero stiffness property of the isolator.

A comparison between the Taylor expansion and the original expression.
Dynamic analysis for a vibration isolatorwith a vibration absorber
A physical model of a grounded dynamic vibration absorber is designed to weaken the strong resonance peak in a vibration isolator so that the system is stable at any excitation frequency. The absorber is composed of a shock-absorbing spring 8, a negative stiffness rod 9,
27
and a shock-absorbing mass block 10. The proposed vibration isolator with a vibration absorber (VIVA) is shown in Figure 6, where

Quasi-zero stiffness vibration isolator with a vibration absorber. (a) Three-dimensional modeling of a vibration isolator with a vibration absorber. (b) Schematic diagram of a VIVA.
Nonlinear dynamics analysis
The nonlinear dynamic equations of the VIVA system is established

Assuming

In view of the low damping, small excitation amplitude, and weak nonlinearity,
28
we assume that

Let

Where
The partial derivative operator is defined as

Substituting equations (10) and (11) in equation (9), one may get



Assuming the solution to the equation in equation (12) is

Where
Substituting equation (15) in the equation (13), one can get

In this system, only the dominant frequency is considered, so the perpetual term condition of the first formula in the elimination equation (16) is obtained as

The second formula in equation (16) does not have a perpetual term.
The special solutions

Substituting equations (17) and (18) in equation (14) yields

where


The perpetual term condition of the first formula in the elimination formula (19) is

The second formula in equation (19) does not have a perpetual term.
The complex function

Substituting equation (21) in equations (17) and (20) and separating the real part from the imaginary part, one can get

Where the amplitude
Linear dynamics analysis
The classical method29,30 is used to ignore the nonlinear term of the VIVA system to establish the dynamic equation

Let

According to equation (25), the amplitude–frequency response formula of the VIVA system under a linear condition is obtained

where




Parameter analysis for a VIVA
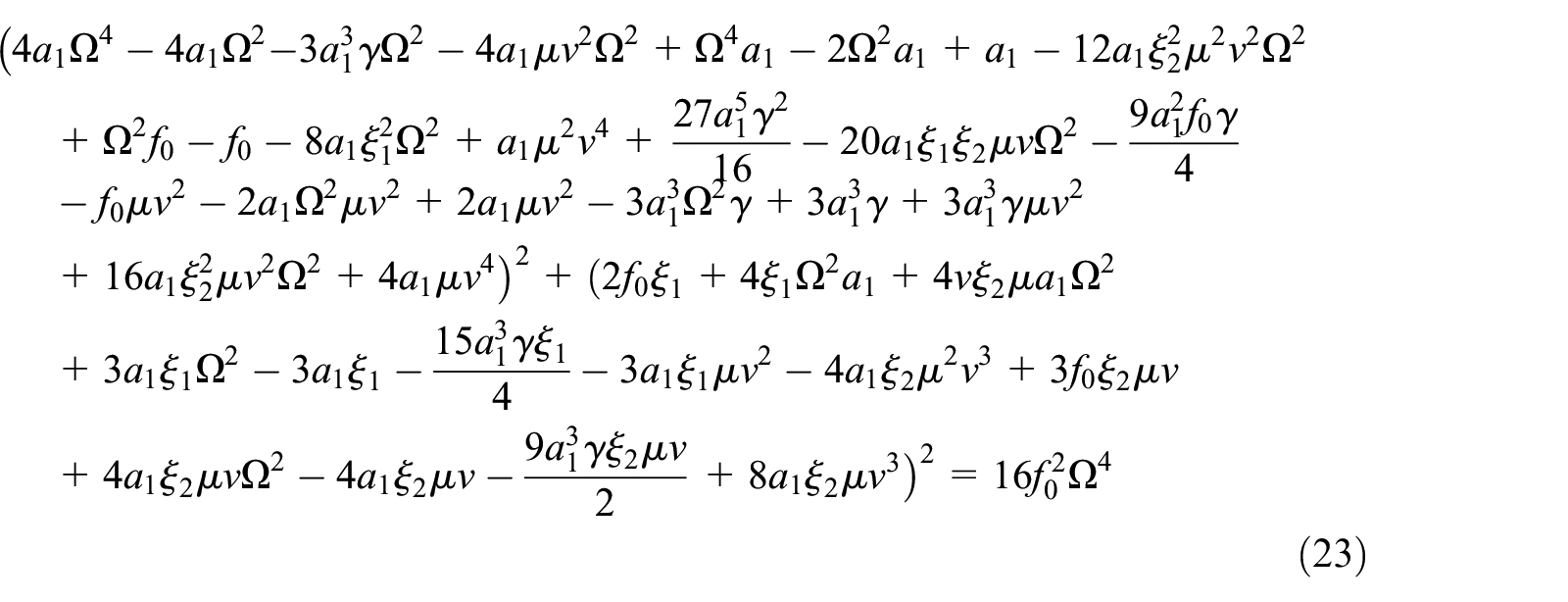
The nonlinear analytical solution of the amplitude–frequency response of a quasi-zero stiffness VIVA system is obtained with equation (23), and the linear analytical solution can be obtained with equation (26). In the nonlinear analytical equation, let
In this system, only increasing the ratio of natural frequencies

Effect of the ratio of natural frequencies: (a)
There is damping in the VIVA isolation system, so there is no anti resonance peak in the amplitude–frequency response diagram. As shown in Figure 8(A) and (B), with the increase of the damper ratio

Effect of the vibration isolator damping ratio: (a)
As shown in Figure 9(A), when only the damping ratio

Effect of the vibration absorber damping ratio: (a)
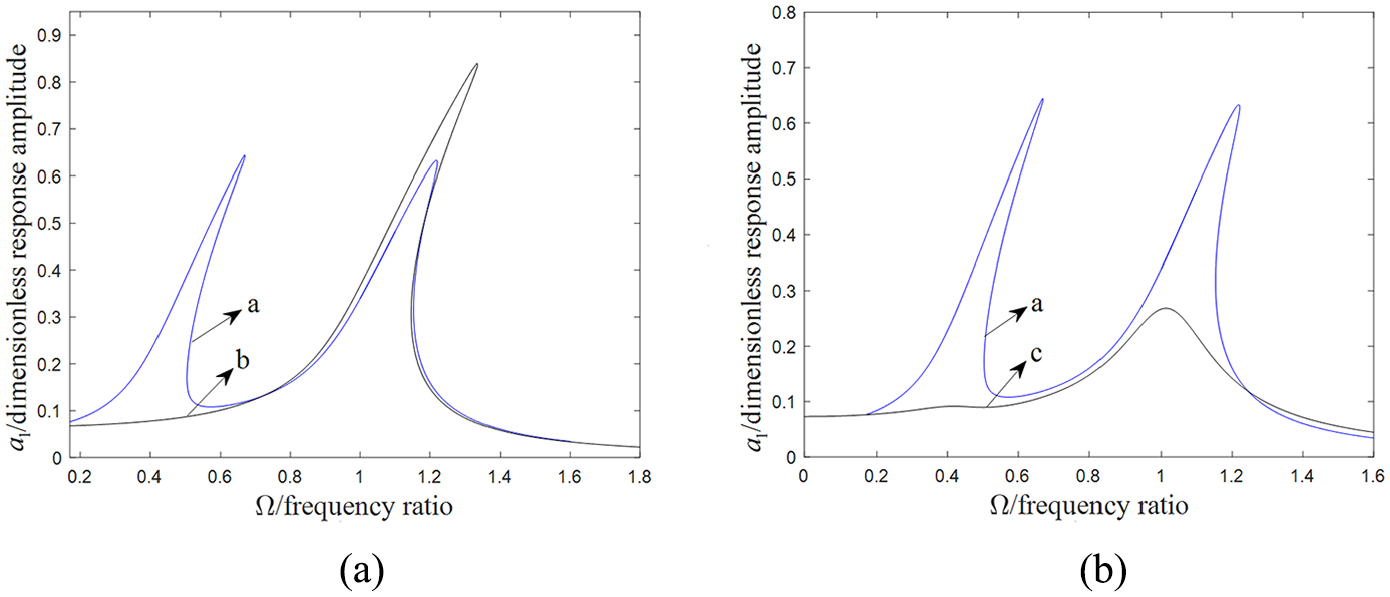
As shown in Figure 10, there are two nonlinear resonance peaks. When the excitation amplitude

Effect of excitation amplitude: (a)
Under the condition of constant system parameters, as shown in the amplitude–frequency response curve a in Figure 10, the VIVA system resonates at
Selection and verification of optimal parameters
Selection of optimal parameters
The VIVA system is nonlinear and the vibration isolation system has damping, so the optimal parameters of the system cannot be obtained by using the set-point theory. Therefore, the iterative algorithm and the influence of parameters in Figures 7–10 on the amplitude–frequency response are used to obtain the optimal parameter, which is
Through equation (23), the comparison diagram of amplitude–frequency response curves of the grounded vibration absorber and the quasi-zero stiffness isolator under nonlinear conditions can be obtained, as shown in Figure 11(A). The peak value of response amplitude of the VIVA system is
Comparison diagram under optimal parameters: (a) Nonlinear analytical solution of the vibration isolator with a vibration absorber system, (b) nonlinear analytical solution of the quasi-zero stiffness isolator, and (c) linear analytical solution of the vibration isolator with a vibration absorber system. (A) Comparison with a vibration isolator. (B) Comparison with linear analytical solution.
Numerical verification
The correctness of the analytical results of equation (23) is proved by using fourth order Runge–Kutta method. Numerical simulation is carried out for equation (8), in which

Comparison between numerical solution and analytical solution. (a) Low-frequency resonance peak. (b) High frequency resonance peak.
The numerical solution of the quasi-zero stiffness isolator at resonance is compared with that of the VIVA system, where

Comparison diagram under optimal parameters. (a) Comparison with a vibration isolator. (b) Comparison with linear analytical solution.
Conclusion
Based on static and dynamic analysis of a nonlinear quasi-zero stiffness VIVA system, a novel VIVA system is proposed to achieve low-frequency vibration isolation to avoid strong resonance, and the system parameters are optimized, with the correctness of the analytical solution proved by numerical verification.
According to the static analysis of the quasi-zero stiffness isolator, it is found that the quasi-zero stiffness is related to the Coulomb friction, pre-tension, and stiffness ratio. Only if these three system parameters satisfy equation (4), the quasi-zero stiffness can be achieved.
The proposed VIVA system is able to solve the problem of strong resonance effectively and realize vibration isolation in low frequency. Under the optimal parameters, the peak value of the response amplitude of the isolator is reduced by 25% compared with that of the quasi-zero stiffness isolator.
The nonlinear analytical solution of the VIVA system is compared with the linear analytical solution. The influence of system parameters on the two solutions is basically the same, but the nonlinear term cannot be ignored; otherwise, the error between them can reach 58%.
Footnotes
Availability of data and material
The manuscript data used to support the findings of this study are included within the article.
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This research is supported by the National Natural Science Foundation of China (11972238).