
Abstract
Agricultural machine automatic navigation poses great challenge to the precise agricultural technology system nowadays. To this end, this paper proposes a novel steering assistance system (SAS) to assist drivers in the path-tracking. First, the driver steering model is investigated through the driver simulator tests. Combining the wheeled tractor kinematics model, a driver-vehicle model is developed. Then, a polytopic linear parameter-varying (LPV) system is adopted to describe the uncertainties, including time-varying driver model parameters and velocity, in the model, based on which an output-feedback robust controller is developed to ensure robust stability within the polytope space. Moreover, a regional pole placement method is adopted to improve the transient performance of the system. Finally, driver-in-the-loop and field tests conducted to value the controller. The results show the effectiveness of the proposed method to improve the path-tracking performance for the agricultural machine navigation, while reducing the physical and mental workload of drivers. This control method is expected to be a paradigm for the precise navigation system of the agricultural machinery.
Keywords
Introduction
Agricultural machine automatic navigation technology is an important technology to realize the precise agriculture.1–2 It has been used in the farming, fertilization, spraying, harvesting and other agricultural production process.3–4 There exits two main concerns which would have an effect on the automatic navigation technology. One is the acquisition of the multiple-information. 5 The environment perception technique can be an effective method which can use onboard sensors to collect the environment information and agricultural machine states such as position, heading angle and speed. 6 Mature technology for precise environment perception can depend on the GNSS (Global Navigation Satellite System), such as GPS (Global Positioning System), GLONASS, GALILEO and BDS (Bei Dou Navigation Satellite System). So far, the most common application in the agricultural machine automatic navigation system is RTK-GPS (real-time kinematic GPS) with the cm-level accuracy. 6 O’Connor 7 first applies RTK-GPS to the navigation system of the tractor, which can minimize the tracking error below 2.5 cm for the straight line running. Unal 8 develops a GPS-guided autonomous robot for the detection of soil and plant test processes. In addition, the rise of the machine vision technique is also providing a feasible scheme for the environment detection. 5 Hiremath et al. 9 propose a vision-based farm navigation system for the robots in the field work. Reference 10 designs a machine version algorithm to apply to the small vehicles in the orchard.
The second problem is the accuracy of path-tracking on the basis of precise environment perception. Many studies have been conducted to investigate the path-tracking controller,11–12 including model-based and model-independent methods. Bai et al. 13 study the influencing factors of tracking accuracy during the curve-line running and presents a self-tuning model control method for the agricultural machine navigation, which can adjust the control input dynamically. The test results indicates that the curve-line tracking error can be less than 18.57 cm. Reference 14 designs a path-tracking system for the tractor and trailer system based on the nonlinear model predictive control algorithm and conducts the field tests to verify the effectiveness of the proposed control method.
It should be noted that abovementioned methods are depend on the agricultural machinery modeling. Model-independent control method can also be an alternative strategy. PID control and fuzzy control are widely used in the model-independent control. Norremark et al. 15 introduce the PID controller into the wheel speed control of weeding machines. The path-tracking error are 1.6 cm and 2.2 cm during running with a speed of 0.31 m/s and 0.52 m/s. As for the fuzzy control, Kannan et al. 16 present a multi-functional wheeled tractor for automatic ploughing, sowing, and soil moisture sensing. The fuzzy controller is used to change the speed of driving wheels and control the steering angle.
However, the model-independent method is difficult to design the proper controller parameters, 17 which determine the control performance for the system. Moreover, the parameters self-tuning method also requires a large number of experimental resources. Therefore, the design of the controller in this work is based on the wheeled tractor two-wheels kinematics model. Nevertheless, as described in, 17 the kinematics model uses the linear approximation method with assuming that a small heading angle and a constant velocity. These assumptions would cause the weak stability of the control system. The robustness of the system cannot be guaranteed during the varying speeds. Considering that the existing agricultural machines basically rely on the manual operation, we mainly study the driver steering assistance system (SAS) to assist drivers in realizing the precise path-tracking.
With regard to the time-varying parameters in the model, the robust controller have also been used to handle the system uncertainties.18–20 Reference 21 designs the active front steering system to maintain the vehicle stability while considering the uncertainty of cornering stiffness. The driver steering angle input is regarded as an external disturbance in.22–23 A robust gain-scheduled H∞ control method is proposed in 22 to realize the integrated control of active steering system and direct yaw-moment control system for electric vehicles. The tests results show that the proposed method can effectively ensure the vehicle lateral stability under the effect of the external disturbances. Reference 23 develops a Takagi-Sugeno (T-S) fuzzy robust controller to enhance the vehicle handling performance. The extreme steering manipulation demonstrates the superiority of the proposed control method. Furthermore, the driver steering model is investigated and integrated into the vehicle model.24–25 A driver-vehicle model is established in, 24 based on which a robust controller is designed to assist the drivers in tracking the desired path for handover scenarios. To achieve good cooperation between drivers and steering assistance system, the driver activity is considered in the reference. 25 Then a Takagi-Sugeno (T-S) fuzzy robust controller is designed to design the lane-keep assistance system. In this work, the driver model parameters and vehicle velocity are regarded as the time-varying parameters. The polytopic methodology with finite vertices is used to describe the system uncertainties. Then a linear parameter-varying (LPV) model is reconstructed. LPV method are widely used to handle the model uncertainties and facilitate the controller design. 22
Assuming that agricultural machines are endowed with the ability to obtain the surrounding environment information and their own states. This paper aims to extend the previous path-tracking work for the agricultural machine automatic navigation. The main contributions of this paper are as follows. First, the driver preview model is used to describe the diver steering maneuver during tracking the desired path. 26 The driver model parameters are identified through the driver tests, based on which a driver-vehicle model is established. Then, an output-feedback robust controller with regional pole placement is presented to design the steering assistance system and improve the path-tracking performance of the agricultural machines. Finally, the simulator and field tests are conducted. The results show the effectiveness of the proposed controller to enhance the path-tracking performance and improve the comfort of the drivers.
The remainder of this paper is organized as follows. “Modeling” develops a driver-wheeled tractor kinematics model. In “Controller design”, a robust H∞ output-feedback controller with regional pole placement is designed. The simulator experiments and field tests are conducted to verify the effectiveness of the proposed control method in “Driver simulator tests”. The conclusions are presented in “Conclusion”.
Modeling
The wheeled tractor motion control is dependent on the agricultural machinery modeling. Here, we adopt a wheeled tractor two-wheels kinematics model, which takes take into account the lateral and yaw motion of the wheeled tractor. Then, a single-point preview model is applied to investigate the drivers’ steering manipulation behavior during the path-tracking.
Vehicle kinematic model
A wheeled tractor kinematics model as shown in Figure 1 is applied to the motion control of the vehicle. It can guarantee a feasible path with satisfying kinematic geometric constraints in real driving conditions. We define a system with the state vector. Then wheeled tractor steering kinematic model can be described by:

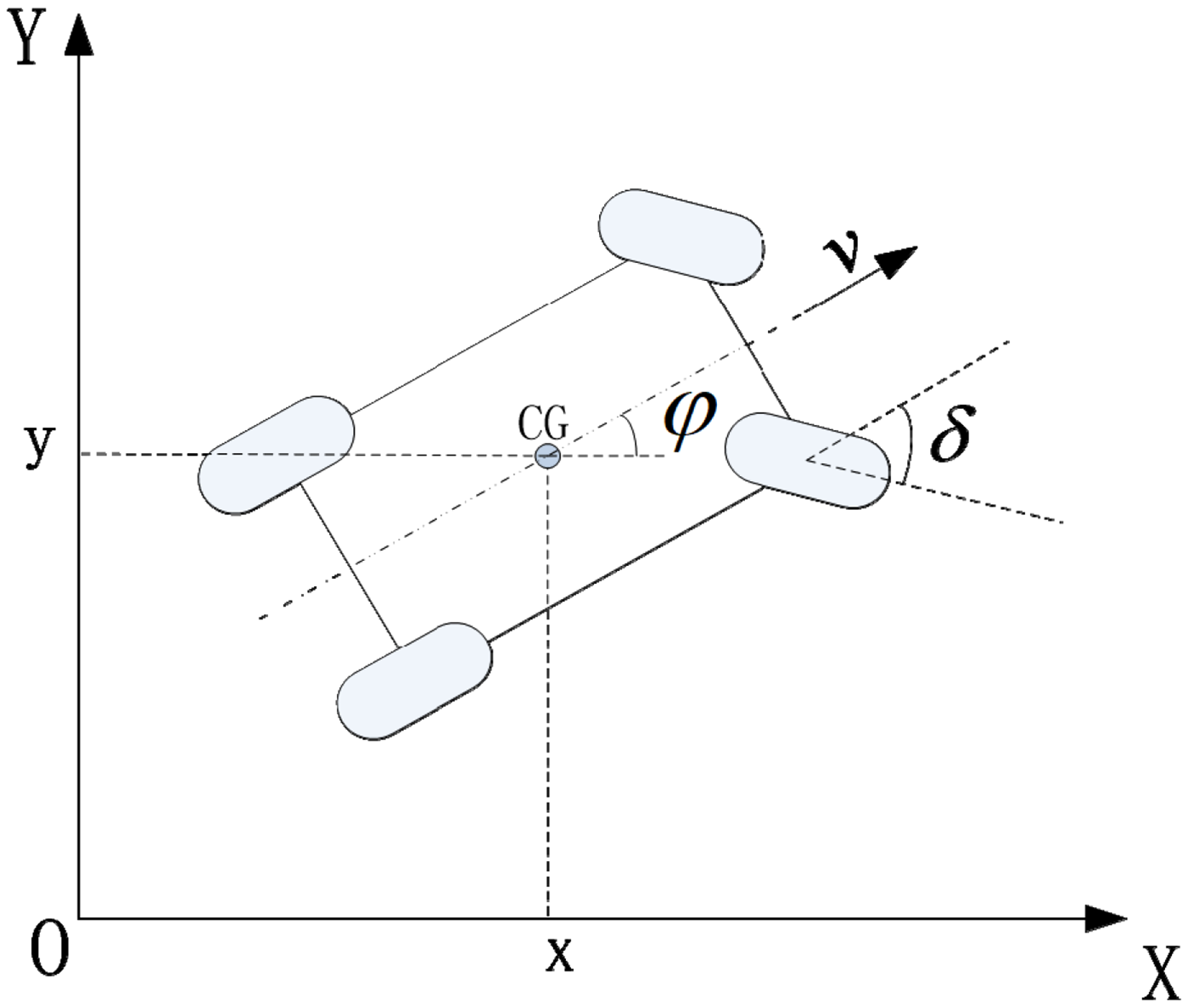
Wheeled tractor kinematics model.
Driver-vehicle model
In this section, a sing-point preview model, as shown in Figure 2, is introduced to represent the driver's steering manipulation



Single-preview driver model.
where

Driver simulator tests.
Then, combing equations (1) and (2), the diver-in-the-loop model is established based on the identification results. The steering input of the SAS is donated by


where
where
Controller design
The diver-vehicle model can be rewritten as:


where
Then the parameter set
The uncertainties of the driver model parameters can be expressed with a rectangular domain as shown in Figure 4. Then, the model (5) can be furthermore represented as a polytopic model:






Polytope for the time-varying parameters.
The parameter matrices in model (6) are given by:
In this section, an output-feedback robust controller is developed to assist the driver, so that the close-loop system can be robust to the time-varying model parameters. The output-feedback control law can be written as:
28
The close-up system is stable and the





Then we can obtain



In addition, the inequality (14) can be included as a constraint for the controller design:
29
For a matrix A, the eigevalues are contained in the region



Then multiplying a congruence transformation to the equation (16) with

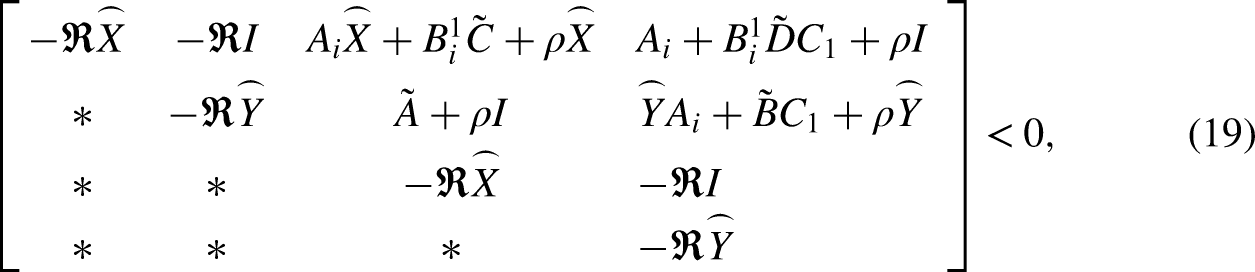
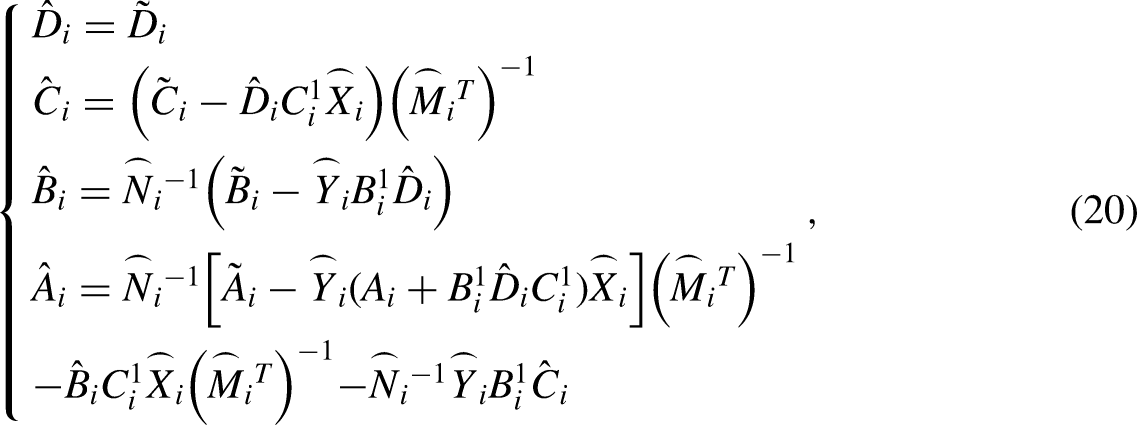
Theorem 1: For the close-loop system (8), the

Driver simulator tests
In this section, the driver simulator tests are conducted to verify the effectiveness of the control method based on a full vehicle model. During the tests, the driver can operate the steering wheel according to the desired path. Then the steering angle information are transmitted to the Dspace, based on which the robust controller was used to calculate the assistance steering angle. Finally, the total steering angle can send to the vehicle model which is established the Carsim software. The real test platform is given in Figure 2. Figure 5 is the experimental set-up, where the steering motor is based on the PID controller. The master controller MicroAutobox is used to compile the proposed control method. The NI/Labview is adopted to show the animations. The control diagram is shown in Figure 6. A PID control is also set as a comparison test to verify the superiority of the proposed controller. Moreover, the field test is conducted to verify the proposed control method.

Experimental set-up.
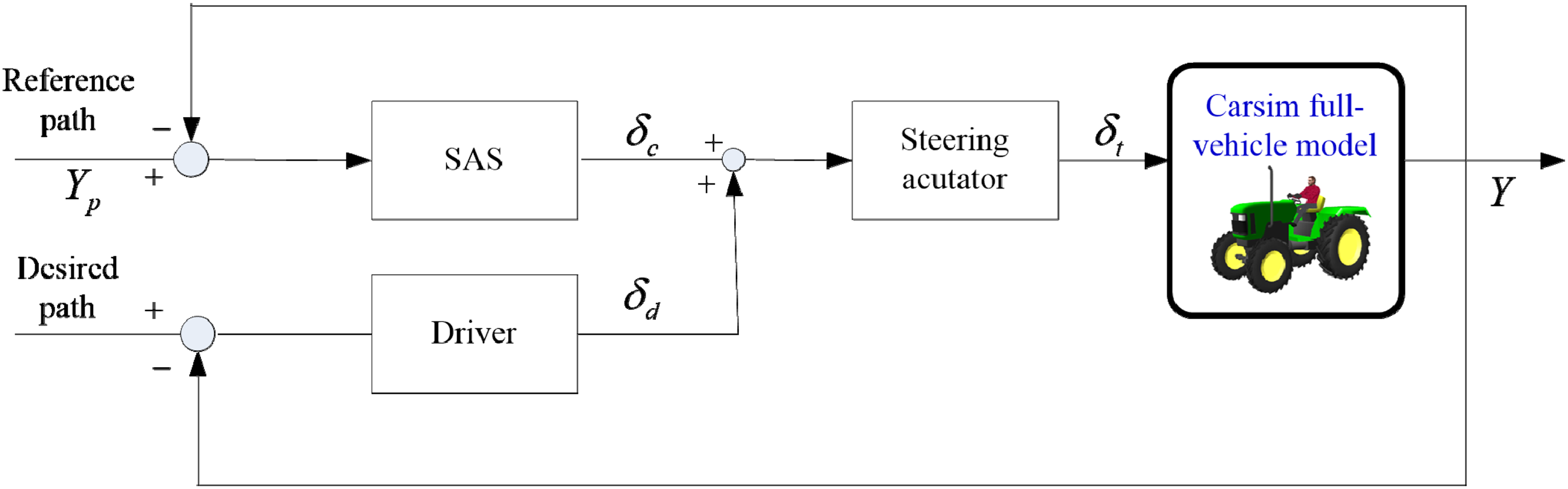
Control diagram of the steering assistance system.
Before the tests, the driver model parameter are required to identify first A skilled driver was trained through the driver simulator. A small-curve path is used to implement the identification tests. The identification results of the driver is shown in Figure 7. It can be seen that the RLS method is effective to identify the driver parameters.
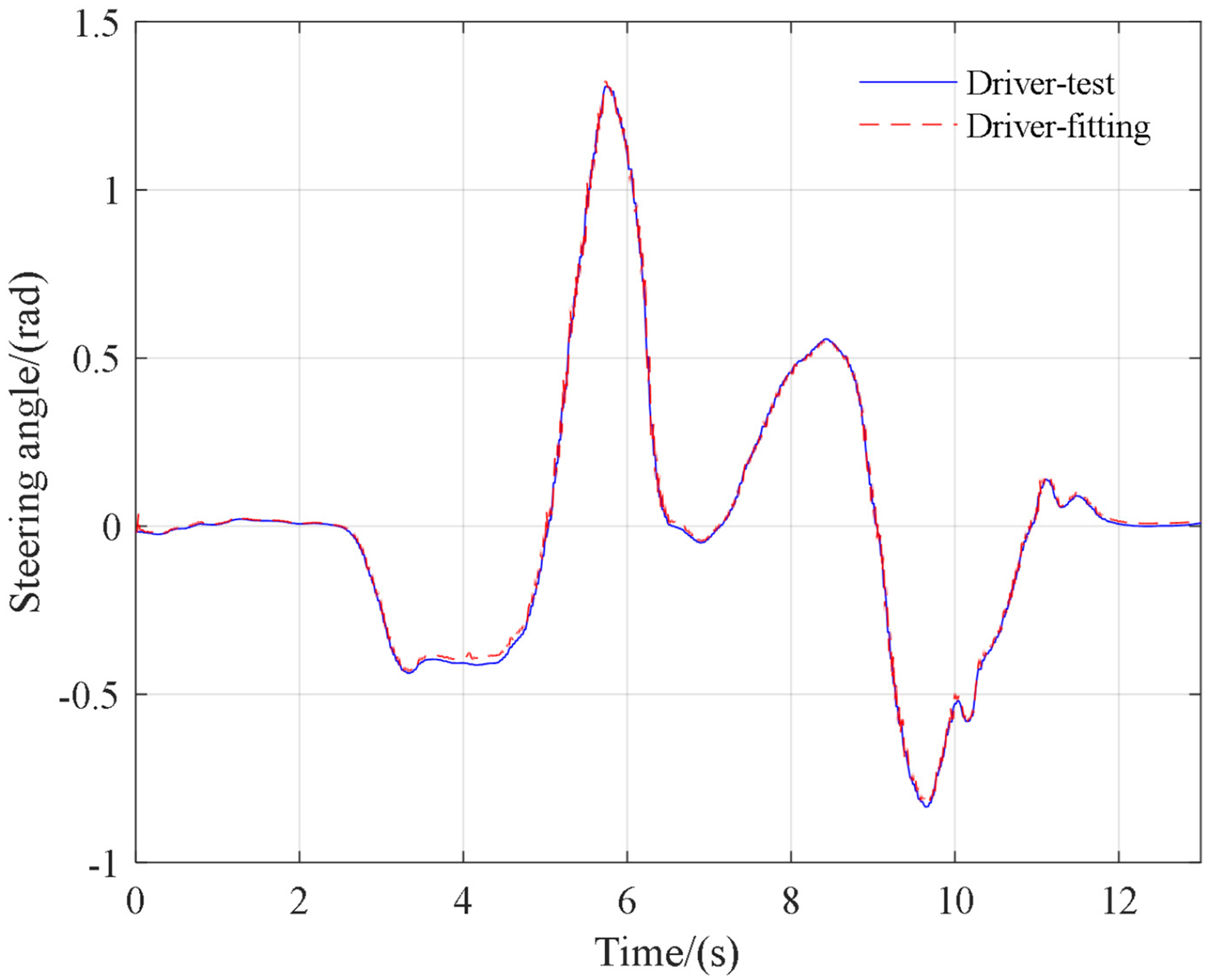
Driver identification results.
Then, the performance indices are defined as:

Poles position of the system.
Scenario 1 test
In this section, a single-lane-change manoeuvre is set to verify the control performance during a machine vehicle runs from straight-line to the curve-line. The reference path and path-tracking error are shown in Figure 9 and Figure 10, respectively. It is clear that the path-tracking performance of the machine vehicle can be improved with both two controllers. However, the proposed robust controller can be better than PID control. It can be seen that the absolute value of maximum deviation between the machine vehicle lateral position and desired path would be 10 cm approximately without the proposed control method at 5∼10 s. It is because the driver may not keep a preview well on the desired path during the lane-change from the straight-line to the curve-line. In case introducing the proposed controller into the system, the absolute value of maximum deviation can be reduced to 2 cm, while 6 cm for PID control. It shows that the path-tracking performance of the robust control excels the PID control. This is because the driver model through the identification can match the real driver characteristics, based on which the robust control method can provide a proper steering angle to assist the wheeled tractor in the path-tracking. This is beneficial to prompt the precise agricultural system. PID algorithm is not a model-based control method. It would be difficult to adjust control parameters based on the engineering experience and achieve a better control performance. In addition, the quantified driver performance indices including physical workload

Reference path of the scenario 1.
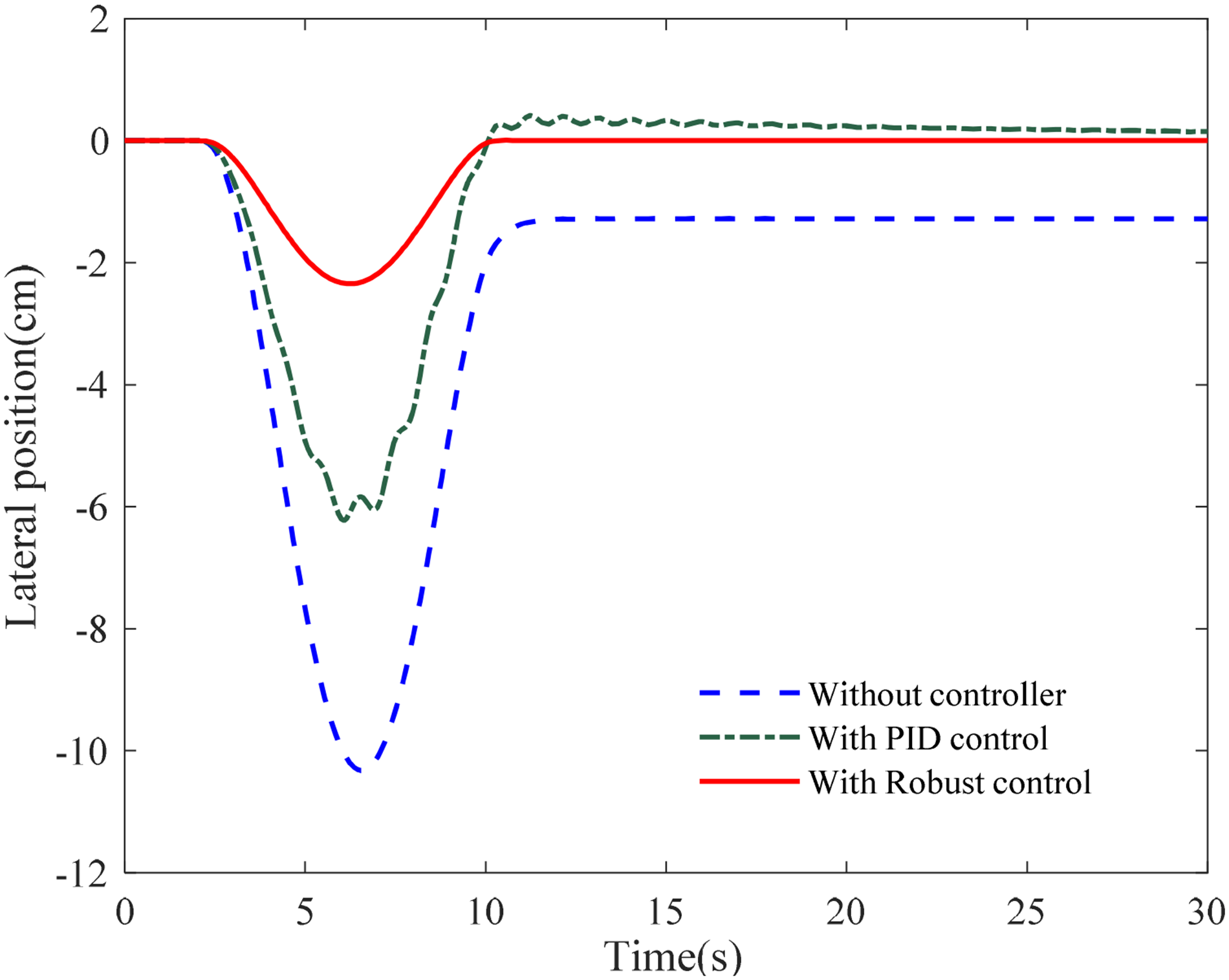
Lateral deviation for scenario 1.
Physical and mental workload of drivers for scenario 1.

Scenario 2 test
Considering the complex condition in the farm work for the agricultural machines, a snake-like line is set to further test the control method. The reference path and path-tracking error are shown in Figure 11 and Figure 12, respectively. As can be seen, the lateral error obviously increase without the control compared to the single-lane-change scenario, while this can be reduced by applying the control. The prosed robust control has a better performance to track the reference path compared to the PID control. The absolute maximum value of the later deviation can be reduced by 75% with the robust control, while 33.3% with the PID control. Additionally, the driver performance indices during the agricultural machine's running are given in Table 2. As can be seen, the driver workload can also be reduced under the effect of the steering assistance system, in which the physical load

Reference path of the scenario 2.

Lateral deviation for scenario 2.
Physical and mental workload of drivers for scenario 2.

Field test
In this section, a wheeled tractor as shown in Figure 13 is used to verify the proposed controller. The GPS is used to obtain the reference path. Industrial Personal Computer (IPC) is in the charge of controlling the motor. The proposed control method is embedded into the Dspace. A straight-line scenario is set to be tracked by a driver. The tracking performance without and with the proposed controller is shown in Figure 14. It is clear that the maximum deviation without the controller can be up to 1 m during path-tracking. It is unfavorable for precise agriculture. As can be seen from the results, the deviation can be reduced significantly with the proposed controller. This can also demonstrate that the proposed controller is effective to improve the path-tracking performance.

Set-up of the wheeled tractor.

Lateral deviation with and without the controller.
Conclusion
In this paper, a steering assistance system for the wheeled tractors is designed to assist drivers in path-tracking. To facilitate the controller design, a driver-machine vehicle model is established first. Considering the uncertainties of driver parameters and vehicle velocity in the model, a linear parameter-varying (LPV) method is employed to reconstruct the model, in which the uncertainties are handled by the polytopic methodology with finite vertices. Then an output-feedback robust control method is proposed to improve the path-tracking accuracy and simultaneously reduce the workloads of drivers. The system transient performance can also be guaranteed through the regional poles assignment. The driver simulator testes with different scenarios are implemented to verify the effectiveness. The results show that the proposed control method can reduce the lateral deviation for path-tracking while ensuring the comfort of drivers. A comparative test with the PID control demonstrates the superiority of the proposed control method. The field tests also validate that the proposed controller can improve the path-tracking performance.
Footnotes
Declaration of conflicting interests
The authors declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The authors disclosed receipt of the following financial support for the research, authorship and/or publication of this article: This research was financially supported by Jiangsu Agricultural Science and Technology Innovation Fund (SCX(21)3149), the National Key R&D Programs of China (2016YFD0700905), Fundamental Research Funds for Central Non-profit Scientific Institution (S201806), the Agricultural Science and Technology Innovation Program of Chinese Academy of Agricultural Sciences (ASTIP, CAAS).