
Abstract
Disk springs are widely used as preload and isolation due to their unique mechanical properties. In the prior research, the effect of linear friction on the disk spring was considered, but contact stiffness, another nonlinear contact factor, is ignored. Accordingly, in this paper, the asymmetric displacements of the contact edges are first derived, and the accurate friction dissipations are obtained, as a way to evaluate the effect of friction on the system. Then the velocity of the edges was obtained to establish a dynamic friction model. Meanwhile, the contact displacement and contact stiffness of the edge are obtained by fractal contact theory. Then the nonlinear static and dynamic models of disk spring with friction and contact stiffness are established by the energy method. The load–deflection relationship, stiffness, and hysteresis of disk spring are studied with different contact states. The results show that the model considering contact stiffness and asymmetric friction dissipation can effectively evaluate the static properties of the disk spring. Friction reinforces the nonlinear behavior of the system, while contact stiffness weakens the nonlinearity of the system. And due to the influence of nonlinear contact factors, the transmissibility curves produce multiple resonance peaks.
Introduction
During the past decades, the application of coned disk springs has expanded into a variety of fields. The most extensive application of disk springs is to provide preload. When the height–thickness ratio of the disk spring is changed, the nonlinear relationship between its load–deflection is also changed. Because of their excellent mechanical properties, the disk springs are used in clutches, dampers, anti-seismic structures, and vibration isolators.1–5 In addition, a positive, zero, or negative stiffness can be obtained, and the system stiffness can be highly customized by stacking. Therefore, in recent years, research on the application of disk springs in quasi-zero stiffness vibration isolators has been increasing.6,7 And the nonlinear characteristics of high static and low dynamic vibration isolators have also been noticed. 8
At present, researchers have studied the performance of disk spring with many approaches. The research mainly focused on the static and dynamic analysis of disk spring, and experimental studies are also used. The most concerned content is the effect of friction on disk spring. The pioneering model was proposed by Almen and Laszlo, 9 which provided a theoretical basis for the field. Almen and Laszlo hypothesized that the angular deflection of the intersecting surface is relatively small, and the intersecting surface remains unchanged at the deflection position, finally, the load is uniformly distributed. Based on these hypotheses, the static model of the disk spring was obtained. Afterward, a problem in the deduction process of the classical model was found by Curti and Orlando, 10 and a modified static model was proposed. In the follow-up research, Curti and Montanini 11 found that the effect of friction could not be neglected when the disk springs with large stiffness were used. Therefore, the static model of the disk spring considering the friction was deduced, and it was pointed out that the friction would cause the lag of the spring in the process of loading and unloading. Since then, more extensive research on disk springs was carried out.
Dharan and Bauman 12 studied the feasibility of replacing steel with composite material in disk spring. Chaturvedi et al. 13 studied the effect of the stepped section on the force–deflection and variable stiffness characteristics. Based on the energy method, Zheng et al. 14 obtained a new analytical solution of the load–deflection characteristic of the disk springs. Ozaki et al. 15 analyzed the influence of friction boundaries based on the equivalence of energies and friction law. Mastricola et al.16,17 proposed a disk spring model considering asymmetric friction, and the effects of friction on the hysteresis phenomenon and nonlinear stiffness of disk spring were studied by theory and experiment. Li et al. 18 investigated the effect of variable friction coefficients on the static properties of disk springs.
Based on the present studies, it is found that, except for friction, the influence of other contact characteristics on disk spring is seldom studied, and contact stiffness is representative. With the development of contact mechanics, researchers have found that the mechanism of contact stress and friction is very complex and it remains to be elucidated in more detail.19,20 According to existing research, contact stiffness affects many systems which including joint surface. To identify contact stiffness and study its effect on the control system, some researchers have been put forward.21–26 Through the experiment, Majumdar and Bhushan 27 found that a variety of surfaces were self-affine in structure within millimeter scales and nanoscales, and fractal dimension D and fractal roughness G were used for the first time to describe surface topography. Subsequently, the contact stiffness based on fractal theory attracted much attention.28–31
In the previous research on disk spring, the effect of friction has been studied in depth. But the effect of another nonlinear contact factor, contact stiffness, does not get much attention. To clarify the influence of contact factors on the performance of disk spring, the exact displacement and velocity of the edges along the friction direction are derived, so the dynamic friction models are available. The contact deflection and contact stiffness are obtained by 3D (three-dimensional) fractal contact model. Then, the nonlinear static and dynamic behavior of the disk spring considering the effect of complex contact states is analyzed by the energy method. Considering the influence of dynamic friction and contact stiffness on the nonlinear characteristics of the system,32–35 it is necessary to introduce them into the study of disk springs.
Static behavior of the disk spring
Static model of disk spring
Figure 1 shows the radial cross-section of the disk spring. According to Almen and Laszlo
9
and Curti and Orlando,
10
the minimum moments on the section satisfies the following equation


Top and cross-section of disk spring.
The torque dM can be expressed by the geometric parameter as

Because τsin(β−φ) = (a−b), equation (2) can be reduced to





Dissipation of friction
As shown in Figure 1, the energy dissipated by friction can be expressed as

Inspired by Ozaki et al., 15 this paper attempts to derive the detailed relationship between u and x.
Likewise, we define l as the length of the cross-section, O is the rotation center of the cross-section, l1 and l2 are the lengths from O to the edge of the cross-section. The relationship between them is







Additionally











Then, u can be written as an expression about x.


where


Load–deflection relationship with friction
When the deflection is Δx, the equilibrium of energies is given by

Then, the energy equation can be transformed into

Divide both sides of equation (31) by Δx



3D fractal contact stiffness
According to Hertz’s theory, the contact between two asperities on the joint under external load can be equivalent to a rigid smooth plane and a spherical equivalent asperity, as shown in Figure 2.

Equivalent contact model of single asperity.
Yan and Komvopoulos
36
improved the univariate W-M function and obtained the surface function which can simulate the 3D surface topography. By deducing a cosine function, the deflection ω of the asperity was defined by the difference between the amplitude of the crest and the trough as

According to Pan et al.,
30
the actual contact area s can be obtained as


Substituting equation (35) into equation (36)




Combining equations (38) to (40), the normal load of single asperity f(s) can be expressed as a function of actual contact area s.









Static analysis considering only friction
The displacement and friction coefficient of the upper and lower contact edges are considered as symmetrical by Ozaki et al. 15 The friction coefficients were considered as asymmetrical by Mastricola et al.16,17 Additionally, both of the displacements and friction coefficients are considered as asymmetrical in this article.
Based on Persson, 38 for most natural and engineering surfaces, the value of fractal dimension D is 2.15 ± 0.05.
The spring parameters are shown in Table 1 and the parameters of the interface are shown in Table 2.
Parameters of disk spring.

Parameters of the interface.

Fix the free height h=1.5τ, Figure 3 shows the displacement of the upper and lower edges. Obviously, for the given c=(a−b)/lnα, the displacement of the lower edge is greater than the upper edge.

Displacement of contact edge.
Figure 4(a) shows the comparison of load–deflection relationship using different models, where μ1 is the friction coefficient of the upper edge and μ2 is the friction coefficient of the lower edge. To reflect the characteristics of the chosen models, asymmetric friction coefficients are defined, and the average is used to represent symmetric friction. Compared with Ozaki's model, which also used the energy method, it can be seen that the asymmetric friction model in this paper has a greater difference. The displacement of the contact edge has a certain influence on the load–deflection relationship of disk spring. In addition, although different methods are used, the curves of Mastricola's model and this paper have a similar trend. It shows that the model is correct in theory.
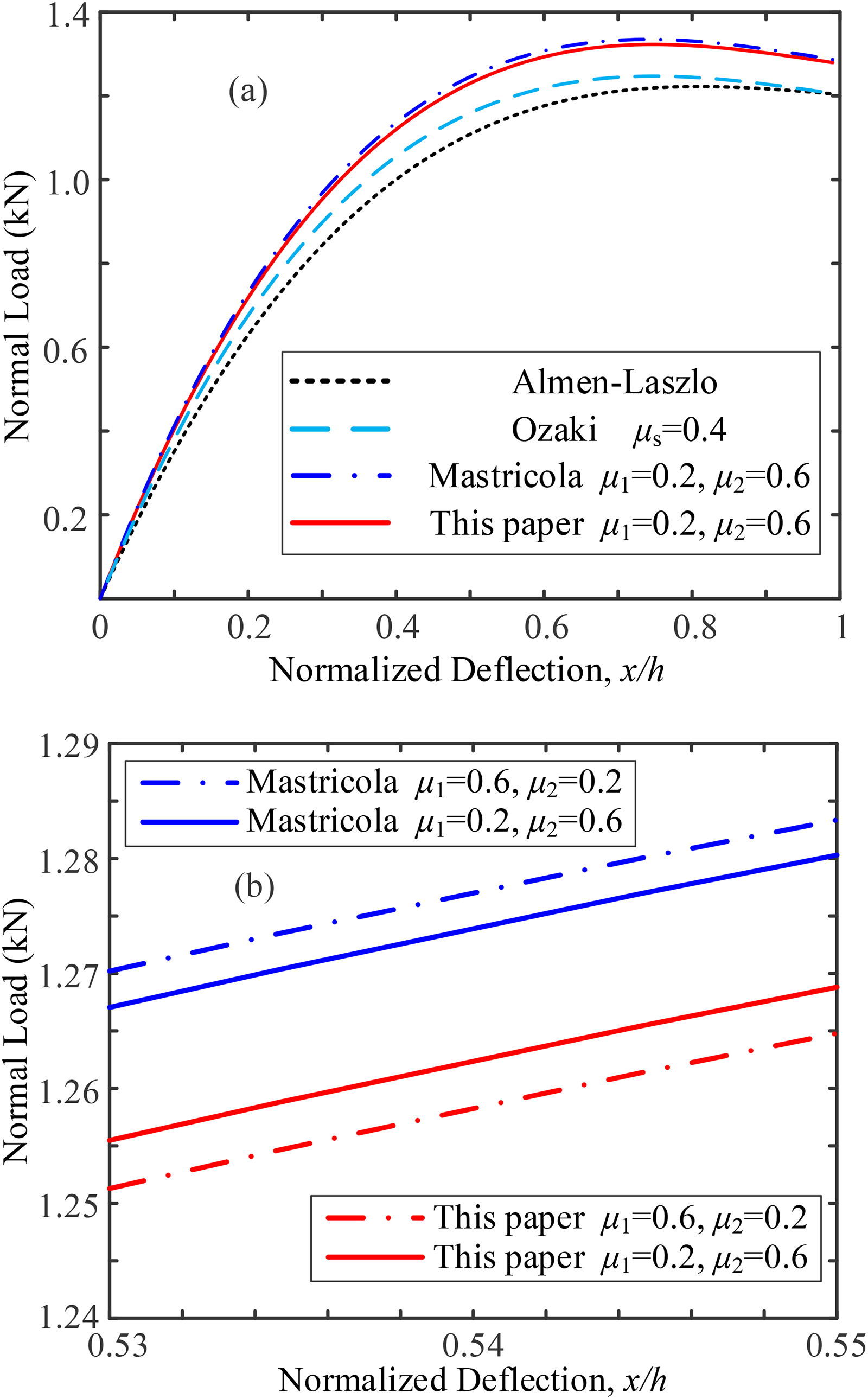
Load–deflection curves with different models.
In Figure 4(b), the arrangement of the friction coefficient is reversed. The curve of this paper has a downward offset, which means a lesser external normal load is needed. The result is contrary to Mastricola's model. This is because, compared to Mastricola's model, this paper considers not only the asymmetry of the friction coefficient but also the asymmetry of the contact edge displacement. In Figure 3, it can be seen that there is a large displacement of the lower edge. When the lower contact surface has a larger friction coefficient, it corresponds to the lower edge moving farther under a larger friction, thus generating a greater frictional dissipation. Accordingly, the load–deflection curve of the disk spring is more affected, as shown in Figure 4(b).
Different friction states are chosen to study the effect of friction. As shown in Figure 5, the load–deflection curves rise along with the y-axis with the increase of the total friction coefficient. Additionally, in the legend of Figure 5, the arrangements of the friction coefficient on the right side are reversed by the ones on the left side, I, II, and III represent three combinations of the curves. It is found that, for each combination, the difference between two curves is decided by the friction coefficient of the lower contact surface, which has a greater relative displacement with the edge of the disk spring. A greater μ2 and a longer displacement correspond to a greater difference.

Load–deflection curves with different friction states.
Static analysis considering contact stiffness
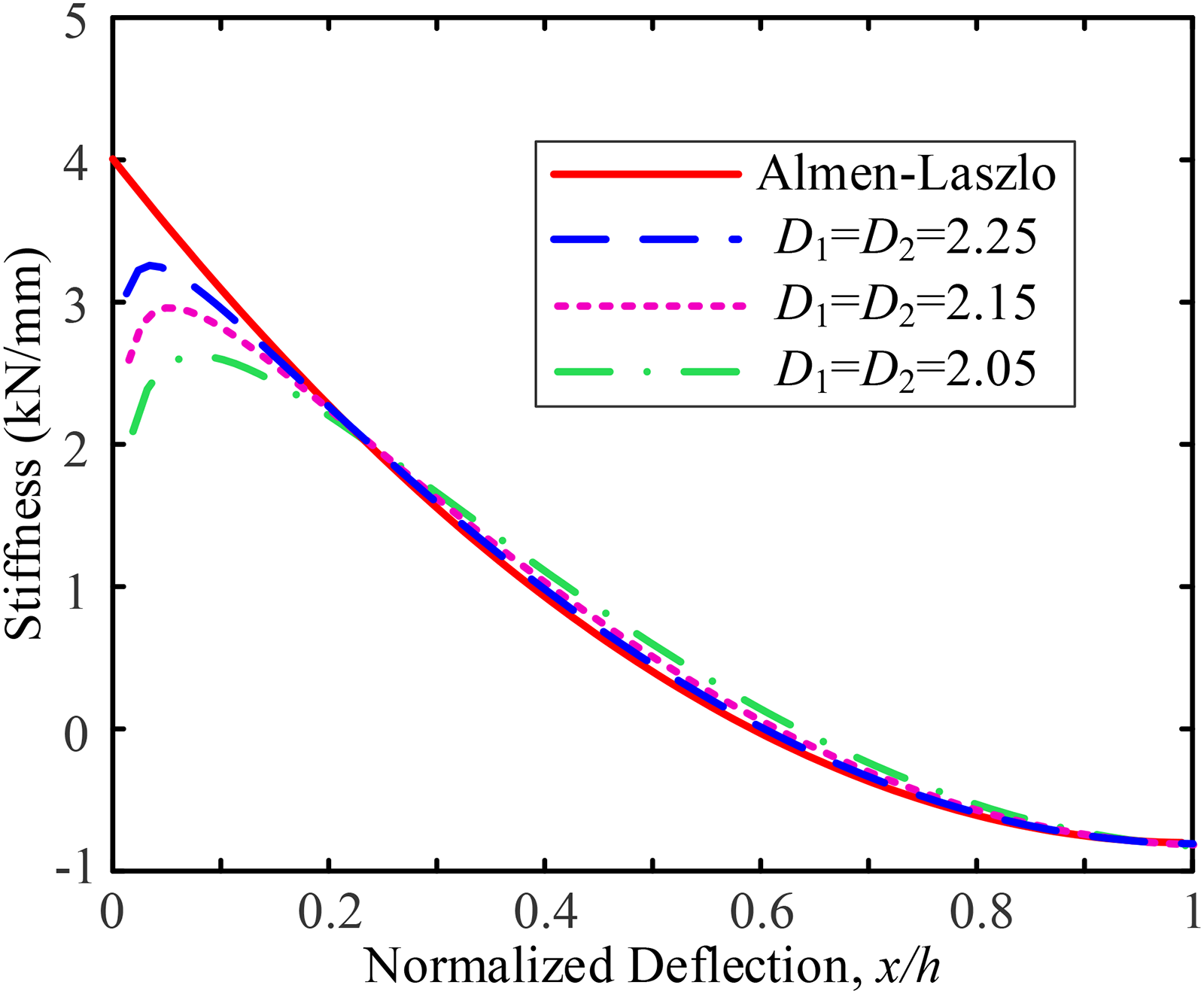
According to section “3D fractal contact stiffness,” the edge of the disk spring is regarded as an elastic half-plane composed of asperities, and the contact surface is regarded as a rigid half-plane, Figure 6 shows the contact stiffness between them under different fractal dimensions. It can be seen that the relationship between contact stiffness and normal load is also nonlinear. And with the same load, a greater fractal dimension corresponds to higher contact stiffness.

Contact stiffness of different D.
As shown in Figure 7, to study the effect of contact stiffness on the disk spring, the disk spring and contact surfaces are simplified as a system composed of three springs in series. All the springs are subjected to the normal load F(xs) obtained by equation (7) (or P(xs) obtained by equation (31), when friction is considered). Ks is the stiffness of disk spring, K1 and K2 are the contact stiffness of upper and lower contact edges, respectively, x1 and x2 are the deflections of contact edge, xs is the deflection of spring.

Model of the disk spring consider with contact stiffness.
Fix a deflection of disk spring xs, calculate the load F(xs) by equation (7), the maximum contact area of the asperities s1 can be obtained by equation (48). The contact stiffness Ki (i=1, 2) corresponding to xs can be obtained by substituting s1 into equation (51). Then the deflection x1 and x2 can be obtained by xi = F(xs)/Ki. The stiffness of disk spring can be obtained as



Stiffness of the disk spring consider with contact stiffness.
Figure 9 shows the load–deflection curves with different arrangements of fractal dimension. It is shown that the trend of the curves does not change with the fractal dimensions. On the other hand, with the same load, a larger fractal dimension corresponds to a smaller deflection when the stiffness of the disk spring is positive. But when the stiffness is negative, the relationship is just the opposite. Additionally, the overlapping curves are shown in Figure 9(b) illustrate that an inverse arrangement of fractal dimensions does not affect the load–deflection relationship.
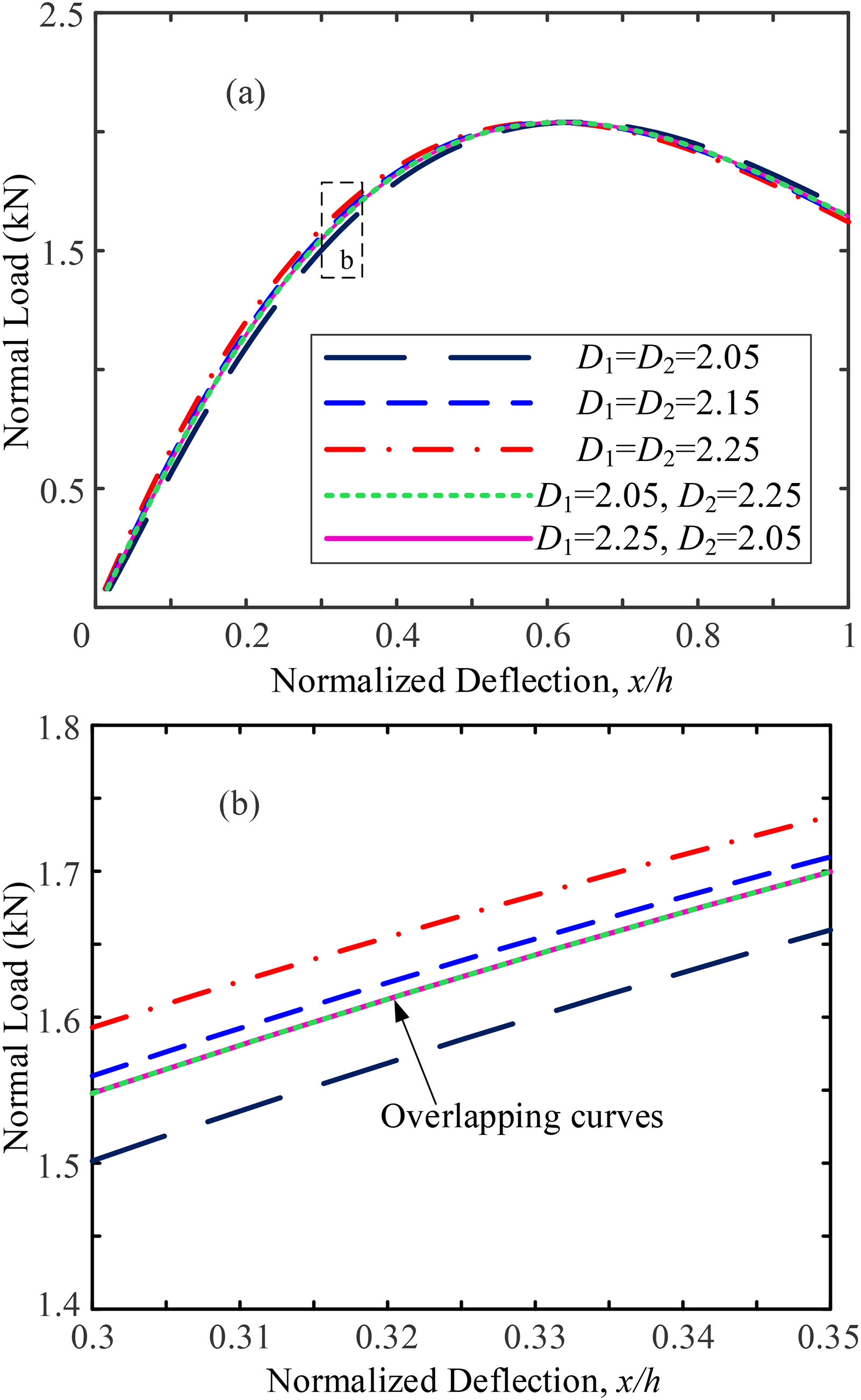
Load–deflection curves with contact stiffness.
Fix D1=D2=2.05 to estimate the contact stiffness. Affected by both h/t and normal load, the difference of x between the two curves in each group is also nonlinear, as shown in Figure 10. It means that, when disk springs with different free heights are placed on the same surface, if contact stiffness is considered, it is difficult to evaluate the nonlinear load–deflection relationship of disk springs accurately by using a traditional or empirical method. The method presented in this paper can be used to improve this situation.

Load–deflection curves with different free highs.
Figure 11 shows the hysteresis loops with different contact states. It can be seen that III and IV have no hysteresis, I and II have a similar trend, but the deflection is different. The friction causes hysteresis, the contact stiffness only changes deflection. It is consistent with the above studies.

Hysteresis loops with different contact states.
Dynamics behavior of the disk spring
Dynamics model of disk spring
According to the Lagrange equation and Figure 12, the dynamic equation of the disk spring system can be obtained as

Single degree freedom model for a disk spring.
To study the effect of friction on the dynamic response of the system, many models of dynamic friction were proposed. 39 Most of the previous studies on the dynamic characteristics of disk spring were based on the static friction model and the velocity of the contact edge along the direction of friction was not derived.
According to equations (27) and (28) in section “Static model of disk spring,” the displacements of upper and lower edges in the tangential direction are obtained. Because u is a function of x, the velocity of u can be obtained as
Then the dynamic friction model proposed by Threlfall
40
is used


Dynamics analysis considering only friction
As shown in Figure 13, friction can strengthen the nonlinear behavior of disk spring. As shown in Figure 13(a), when the range of frequency is 100–300 Hz, the nonlinear behaviors change obviously. So the following studies mainly focus on this scope. The I, II, and III are defined as the regions of dynamic behaviors. When friction is neglected, the dynamic response of disk spring always maintains in I. The system at this point is a single-degree-of-freedom system not affected by nonlinear factors, and no bifurcation is generated, as shown in Figure 13(b). As shown in Figure 13(c) and (d), the system shows multiple times-period bifurcations, and the larger the friction factor, the more bifurcation points there are. This is because dynamic friction is considered, which is equivalent to introducing a nonlinear factor into the system, and a larger friction coefficient corresponds to larger nonlinear friction. The system makes a complex pseudo-periodic motion near the jump point because the excitation frequency is close to the resonant frequency of the system at this point and the effect of nonlinear friction is intensified. Similarly, subject to friction, the ranges of II and III increase with the friction coefficient, and the amplitudes of deflection in III also increase. Figure 13(d) is compared with Figure 13(e), it can be seen that the contrary arrangement of friction coefficient does not affect the dynamic response in I and II, but the range of III and x in III increase if the lower edge has a larger friction coefficient. Additionally, the migrations appear when ωex=196 Hz and the distances between migration points reduce with the increase of friction coefficient.

Bifurcation diagram with different friction coefficient (a) μ1 = μ2 = 0.8 for the complete range, (b) μ1 = μ2 = 0, (c) μ1 = μ2 = 0.8, (d) μ1 = 0.2, μ2 = 0.6 and (e) μ1 = 0.6, μ2 = 0.2.
Based on Figure 13, the dynamic response with several groups of representative data is presented in Figures 14 to 17. Figure 14 is the dynamic response in I. It can be seen that the system behaves as a single period motion, the main frequency component of the system vibration is ωex, and 2ωex is a very small fraction. Figure 15 is the dynamic response in II. The system behaves as a two-period motion, the main frequency components are 0.5ωex, ωex, 1.5ωex, 2ωex, 2.5ωex, and rare 3ωex. Figure 16 is the dynamic response in III. The system behaves as a quasi-period motion, the maximum amplitude and velocity are increased by an order of magnitude. The main frequency components are 0.07ωex, 0.86ωex, 0.93ωex, ωex, 1.86ωex, and 0.14ωex, 0.8ωex, 1.07ωex, 1.8ωex, 1.93ωex are the small fractions. Since 0.93ωex is closer to the natural frequency of the system, it has the largest amplitude. Figure 17 is the dynamic response in II with greater friction coefficients. The system behaves as a six-period motion. The main frequency components are 0.17ωex, ωex, 1.17ωex, 2ωex, 2.17ωex, and 0.33ωex, 0.83ωex, 1.33ωex, 1.83ωex, 2.33ωex, 3.17ωex are the small fractions. In addition, since the Threlfall friction model approximates a rectangular wave, the stiffness obtained by considering its effects also approximates a rectangular wave, thus generating an abundance of superharmonic and subharmonic components in the system.

Dynamic response of disk spring with μ1 = μ2=0 and ωex=190 Hz: (a) time-domain diagram and (b) frequency-domain diagram.

Dynamic response of disk spring with μ1=0.2, μ2=0.6, and ωex=144 Hz: (a) time-domain diagram and (b) frequency-domain diagram.

Dynamic response of disk spring with μ1 = 0.2, μ2 = 0.6, and ωex=228 Hz: (a) time-domain diagram and (b) frequency-domain diagram.

Dynamic response of disk spring with μ1=μ2=0.8 and ωex=182 Hz: (a) time-domain diagram and (b) frequency-domain diagram.
In summary, a greater friction coefficient corresponds to more complex nonlinear behavior and more noninteger multiple resonant frequencies.
In this paper, it's difficult to obtain the traditional formula of transmissibility. The discrete data of Tr are obtained by the definition of transmissibility. According to Figures 7 and 12, the static deflection caused by Fex is xs, the amplitude of dynamic response caused by Fex is x, so the vibration transmissibility Tr for the given excitation frequency of the disk spring can be obtained as

Transmissibility with different friction coefficients.
Dynamic analysis with complex contact state
To introduce the effect of contact stiffness, the K=Ks in equation (55) is replaced by equation (53), the Ks obtained by equation (59) is still used to consider the effect of friction.
With the fixed friction coefficient, Figure 19 shows the bifurcation diagrams consider with different contact stiffness. Compared with Figure 13(b), the ranges of II and III decrease with the increase of fractal dimensions. It means that the nonlinear behavior of disk spring can be weakened by introducing nonlinear contact stiffness, and a smaller contact stiffness corresponds to a weaker system nonlinearity. Figure 19(c) is compared with Figure 19(d), which shows that the contrary arrangement of fractal dimensions does not affect the dynamic behavior.

Bifurcation diagram with different fractal dimensions for μ1=μ2=0.8: (a) D1=D2=2.05, (b) D1=D2=2.25, (c) D1=2.05, D2=2.25, and (d) D1=2.25, D2=2.05.
Figures 20 and 21 are the transmissibility with different fractal dimensions. It can be seen that the resonance frequency increases with the fractal dimensions. When friction is not considered, a higher peak of the resonance frequency corresponds to a smaller fractal dimension. Because the contact stiffness decreases with the decrease of fractal dimension. Then with the decreases of contact stiffness, the equivalent stiffness of the system decreases, and the deflection increases, which leads to the decrease of the natural frequency and the increase of the amplitude. When friction is considered, the number of local peaks can be reduced by decreasing the fractal dimension. Because introducing the contact stiffness can reduce the system nonlinearity caused by friction.

Transmissibility with different fractal dimensions for μ1 = μ2 = 0.

Transmissibility with different fractal dimensions for μ1 = μ2 = 0.8.
Additionally, in Figure 21, a new peak of resonance occurs at the second natural frequency of the system because the system is nonlinear due to friction and contact stiffness. It puts forward new requirements for vibration control of the system with disk spring. And by combining Figures 18, 20 and 21, it can be seen that when the range of excitation frequency is 1.4ω0∼2ω0 (ω0 is the natural frequency), the vibration isolation based on disk spring has stable performance.
Conclusion
In this paper, the displacements and velocities of the upper and lower edges of the disk spring are obtained respectively. And the elastic contact stiffness of the edges is obtained by the fractal contact theory. Then the static and dynamic models of disk spring with complex contact state are established by energy method.
In static analysis, friction is considered as energy dissipation and contact stiffness is considered as additional deflection. Compared with previous studies, the displacements of the upper and lower edges are asymmetric. When the friction coefficient is also asymmetric, the method proposed in this paper can evaluate the friction dissipation of the upper and lower edges, respectively, and accurately. When the edge with larger displacement has a greater friction coefficient, more dissipation is generated and causes greater hysteresis. On the other hand, the contact stiffness can change the system stiffness and increases the normal deflection. The changing trend of deflection is nonlinear with the change of load and free height. The contact stiffness does not cause hysteresis and its asymmetry does not affect the load–deflection relationship.
In dynamic analysis, friction is obtained by a dynamic model, which is related to the velocities of the upper and lower edges. The equivalent stiffness is obtained by parallel connection of spring stiffness and contact stiffness. It is found that, as a nonlinear factor, the friction can expand the frequency range of quasi-periodic and n-period motions, it also can introduce extra resonance frequency. Additionally, asymmetric friction has little effect on nonlinear behavior. On the contrary, also as a nonlinear factor, the contact stiffness can contract the frequency range of nonlinear behaviors, and asymmetric contact stiffness has no effect on nonlinear behavior. From the aspect of transmissibility, friction can increases the number of a local peak, contact stiffness can reduces the resonance frequency. Extra formants occur at the second natural frequency of the system. When active control is not applied, the vibration isolation range of disk spring is 1.4ω0∼2ω0.
Footnotes
Acknowledgements
The authors greatly appreciate the financial support of the National Natural Science Foundation of China (no. 51875092), the National Key Research and Development Project of China (no. 2020YFB2007802), and the Natural Science Foundation of Ningxia Province (no. 2020AAC03279).
Declaration of competing interest
The authors declare that they have no known competing financial interests or personal relationships that could have appeared to influence the work reported in this paper.
Funding
The authors received no financial support for the research, authorship, and/or publication of this article.