
Abstract
Multi-axis motion system is widely applied in commercial industrial machines such as precision CNC machine tools, Robot manipulator and laser cutting machines, etc. Contour accuracy plays a major role for the multi-axis servo motion system. The contour machining accuracy is related to the synthesis of single-axis position accuracy and multi-axis linkage accuracy. Only improving the single-axis tracking performance cannot effectively guarantee the machining accuracy of multi-axis system. The primary objective of this study was to design a contour control method to improve single-axis tracking accuracy and multi-axis contour accuracy. A control strategy that combines a sliding mode tracking controller, a disturbance observer and an adaptive fuzzy PID cross coupled controller is proposed. Sliding mode control is simple and has strong robustness to parameter changes and disturbance, which is especially suitable for control of such as non-linear multi-axis motion system. Besides, disturbance is inevitable in practical application, which degrades the motion accuracy. In order to eliminate the influence of external disturbance and uncertainty, disturbance observer is adopted to accurately estimate external disturbance and reduce the chattering phenomenon of sliding mode control, then improve the single-axis tracking accuracy. In order to further consider the coordination between different motion axes and improve the contour accuracy, the PID cross coupled control is used. Owing to conventional PID control cannot satisfy the multi-axis servo motion system with nonlinearity and uncertainty, an adaptive fuzzy method with on-line real-time PID parameters adjustment is proposed. The three-axis motion platform driven by PMLSM is used as the control object, to analysis the influence of disturbance observer on sliding mode control signal and analysis adaptive fuzzy PID cross coupled control performance respectively. The disturbance observer is used to observe the disturbance signal and estimate the disturbance well. The chattering of the sliding mode control signal is obviously improved. Next, compared with the conventional PID-CCC control, adaptive fuzzy PID- CCC control can significantly reduce the tracking error, the contour accuracy is also obviously improved. The disturbance observer can effectively eliminate the influence of external disturbance, reduce the chattering of sliding mode control, and ensure the single-axis accurate tracking. The self-adaptive fuzzy PID cross coupled controller can eliminate the influence of the dynamic characteristics mismatching and parameter difference of each axis, and improve contour accuracy. The simulation results clearly demonstrate the effectiveness of the proposed control method.
Keywords
Introduction
The objective of multi-axis motion control system is to track the desired contour trajectory with high- speed and high-precision. It is widely used in precision CNC machine tools, multi-DOF manipulator and cutting machine.1–3 Therefore, the research of high-performance multi-axis contour control strategy has important practical significance and application prospects.
For the multi-axis servo motion system, its movement accuracy depends on single-axis tracking error and contour error. 4 The contour trajectory is the result of coordinated multi-axis movement. The contour machining accuracy is related to the dynamic characteristics and parameter matching of each linkage axis of the machine tool, and also the synthesis of single-axis position accuracy and multi-axis linkage accuracy. 5 In recent years, numerous studies have been performed for single axis tracking motion, such as feedforward control,6,7 adaptive control,8,9 and zero phase error tracking control 10 and so on. In these control methods, the actual position information of each axis is not related to each other, and each axis is independently controlled to improve the position accuracy of single axis. However, the contour error is not only the sum of the motion tracking error of each axis for the feed system, but both gain parameter and dynamic mismatch between each axis will also cause the contour error. 11 Therefore, only improving the single-axis tracking performance cannot guarantee the machining accuracy of the multi-axis system. In order to further consider the coordination between different motion axes and improve the contour accuracy, cross coupled control method (CCC) was proposed by Koren. 12 In CCC, contour error is estimated by the geometrical relationship of tracking error and reference contour, which provides an opportunity to solve the synchronous control problem of multi-axis motion system. Considering the interaction between the axes, the contour controller is used to compensate the contour error. CCC is usually combined with modern control theories, such as robust control, 13 sliding mode control, predictive control,14,15 iterative learning control,16,17 neural network control, 18 and so on.
Among them, sliding mode control19,20 is simple and has strong robustness to parameter changes and disturbance, which is especially suitable for control of such as non-linear multi-axis motion system. On the other hand, disturbance is inevitable in practical application, which is one of the main factors that degrade the motion accuracy. In order to eliminate the influence of external disturbance and uncertainty, the traditional sliding mode control needs a large switching gain, which results in obvious chattering. Such chattering may cause the existence of un-modeled high-frequency components in the system or even cause system instability. Then, the disturbance observer is introduced to accurately estimate the uncertainty and external disturbance, so as to effectively reduce chattering and improve the single-axis tracking accuracy. By using sliding mode control and disturbance observer to reduce the tracking error of single-axis, the position information of other linkage axes is introduced into the position control of this axis as mutual correction. That means, using the coupled gain to calculate the contour error, and then through the CCC to allocate the contour error to each axis for error compensation, so as to ensure the synchronization of each-axis and reduce the contour error of the system.
In this paper, we propose an adaptive fuzzy PID cross coupled control for multi-axis motion system based on sliding mode disturbance observation. Firstly, the sliding mode controller is carried out as single-axis motion controller. Secondly, the disturbance observe is introduced to accurately estimate the uncertainty and external disturbance, so as to effectively reduce chattering and improve the single-axis tracking accuracy. In addition to considering the accuracy the contour control, CCC adopts simple and effective PID control method. Aiming at the problem that conventional PID control cannot satisfy the multi-axis servo motion system with nonlinearity and uncertainty, an adaptive fuzzy method with on-line real-time PID parameters adjustment is proposed. In this method, the fuzzy logic system does not depend on the system model, and can approach any continuous function in the compact set. It can be used for online real-time tuning of PID parameters.
The rest of this paper is organized as follows: Section 2 defines the contour error estimation of three-axis motion system; Section 3 describes the design of the proposed controller, including the design of sliding mode controller based on disturbance observation and adaptive fuzzy PID cross coupled controller. And Section 4 demonstrates the simulation and analysis. Finally, the conclusions are given in Section 5.
Contour error estimation of three-axis motion system
The cross coupled controller can reduce the contour error by choosing the appropriate coupled operator to coordinate the motion of each axis. The coupled gain of CCC is used to calculate the contour error and determine the compensation signal allocated to each axis, so it is very critical to determine the coupled gain value. For circular and arbitrary non-circular contour, Yeh and Hsu 21 proposes a contour error estimation method, which is suitable for two or more axes.
The geometric relationship of the three-axis system is shown in Figure 1.
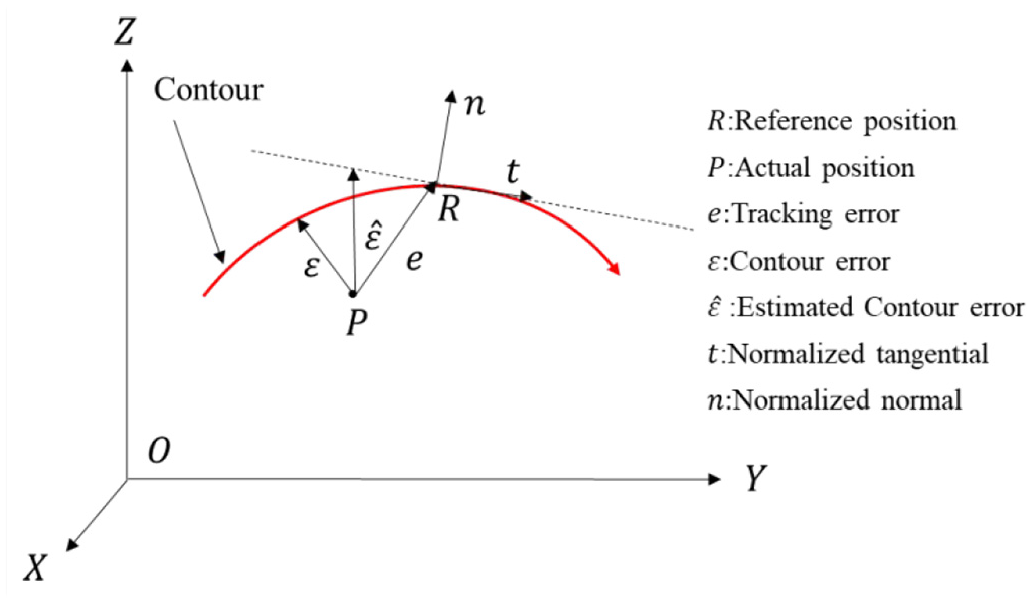
Geometric relationship of three-axis motion system.
The estimated contour error is defined as the shortest distance from the actual position to the tangent of the reference position. When the tracking error is small enough, the estimated contour error vector
Define the normalized estimated contour error:

where

Based on Formula (2), it is concluded that

From Formulas (2) and (3), and according to the properties of vector and inner product, get


where, the direction of the normalized estimated contour error vector
Since the angle between


As shown in Figure 1 and Formula (1), the estimated contour error vector

Thus, the estimated contour error vector is obtained as

Let
Then, contour error is expressed as:

Because this estimation method is simple and efficient, it will be used to estimate the coupled gain of the cross-coupled controller in this paper.
Design of adaptive fuzzy PID-CCC based on sliding mode disturbance observation
Sliding mode control is adopted for single-axis, the disturbance observer is introduced to estimate the uncertainty and external disturbance of the controlled object accurately, so as to reduce the switching gain and effectively reduce chattering of sliding mode control. The PID cross coupled control algorithm is adopted for coordinated movement between axes, and adaptive fuzzy control is adopted to adjust PID parameters online. The structural diagram of the control system is shown in Figure 2.

The structure diagram of the control system.
where,
Designing SMC based on disturbance observation
The permanent magnet synchronous servo motor is widely used in CNC machine tools due to its high accuracy and fast response.22,23 In this paper, a three-axis motion platform driven by two perpendicular permanent magnet linear synchronous motors (PMLSM) is used as the control object. Its mechanical motion equation is as follows:

where,
Select motor position

where,
For the single axis system, the sliding surface is chosen as

where,
Design sliding mode control law:

where,
The disturbance observer is designed as

in which,
The disturbance observer can be expressed as

Stability analysis
Define Lyapunov function as

in which,
The derivative of

Substitute the differential equation of the control object into Formula (18), and then get

When the condition

Let the disturbance signal as slow time-varying signal, satisfying

Sum up,

Design of CCC based on adaptive fuzzy PID
In order to solve the problem of contour error caused by the mismatching of the dynamic characteristics of each axis in the process of multi-axis linkage machining, the CCC is adopted in this paper. By selecting the appropriate coupled gain, coordinate the movement of each axis to ensure the synchronization motion, so as to reduce the contour error. PID control with simple algorithm and good real-time performance is adopted as the cross coupled controller, and adaptive fuzzy control is introduced for adaptive tuning of PID controller parameters. It can effectively solve the problem that PID parameters are difficult to set due to the nonlinearity and time-varying of servo system.
The adaptive fuzzy controller used to approximate the PID controller parameters,



where,
The following two steps are used to construct the fuzzy system
Step 1: Choose contour error

Membership function.
Step 2: Construct fuzzy system using the following fuzzy rules, as shown in Table 1.
Fuzzy rule base.

Product inference engine, singleton fuzzifier, and center average defuzzifier are used to calculate outputs, the fuzzy controller is:

where,

Using the same process, construct adaptive fuzzy system
In this paper, Fuzzy logic system output

For the adaptive controllers (23–25), the adaptive weights



where,
The structural diagram of adaptive-fuzzy PID controller is shown in the Figure 4.
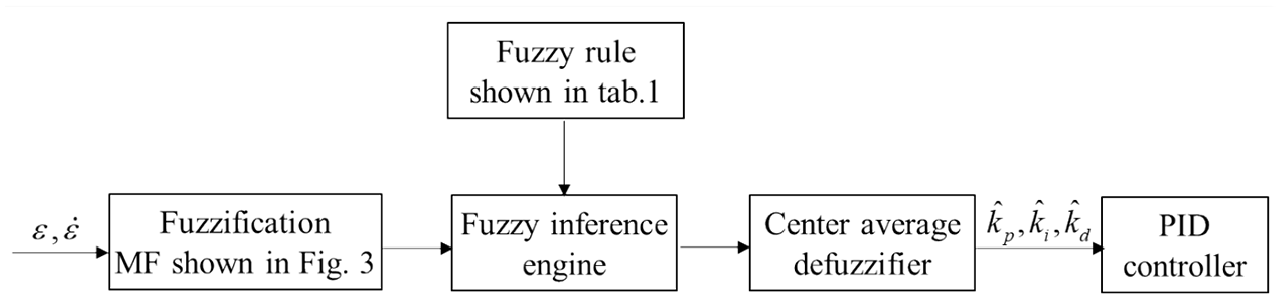
Structural diagram of adaptive-fuzzy PID controller.
Simulation analysis
Simulation parameters setting
The three-axis motion platform driven by PMLSM is used as the control object to verify the effectiveness of the proposed control method. Motor parameters are shown in Table 2.
Parameters of three-axis PMLSM system.

The Multi-axis CNC system is prone to be affected by disturbance, and we randomly choose
In order to ensure the control performance of the system, the sliding mode control algorithm based on the disturbance observer is used for tracking control of the single-axis, and the cross coupled controller based on adaptive fuzzy PID control is used to coordinate motion control between the axes, so as to improve the accuracy of contour control. Controller parameters are shown in Table 3.
Controller parameters.

The following performance indexes between 0 and 10 s are used to analyze the performance of the control system.
Maximum error for transient performance evaluation:

RMS and mean error for steady-state performance evaluation


To verify the effectiveness of the proposed control scheme, a screw-shape curve is chosen as the reference contour, which can be expressed by the following equations:

Analysis of the influence of disturbance observer on control performance
In this part, the influence of the disturbance observer on the single-axis sliding mode control signal is analyzed. The two cases with disturbance observer and without disturbance observer are compared. In the single-axis sliding mode controller (14), if there is no disturbance observer to observe and compensate the disturbance signal, a large switching gain coefficient is needed to overcome the influence of the disturbance. The switching gain of each axis is taken as

Simulation effect of single axis SMC without disturbance observation: (a) SMC control signal of
where Figure 5(a)–(c) are SMC signal of axes
Next, the disturbance observer is used to observe and compensate the disturbance, and the smaller switching gain coefficient is selected (the
where, Figure 6(a)–(c) are sliding mode control signal of the three axes with disturbance observation; Figure 6(d) is the triaxial disturbance signal and its observation.
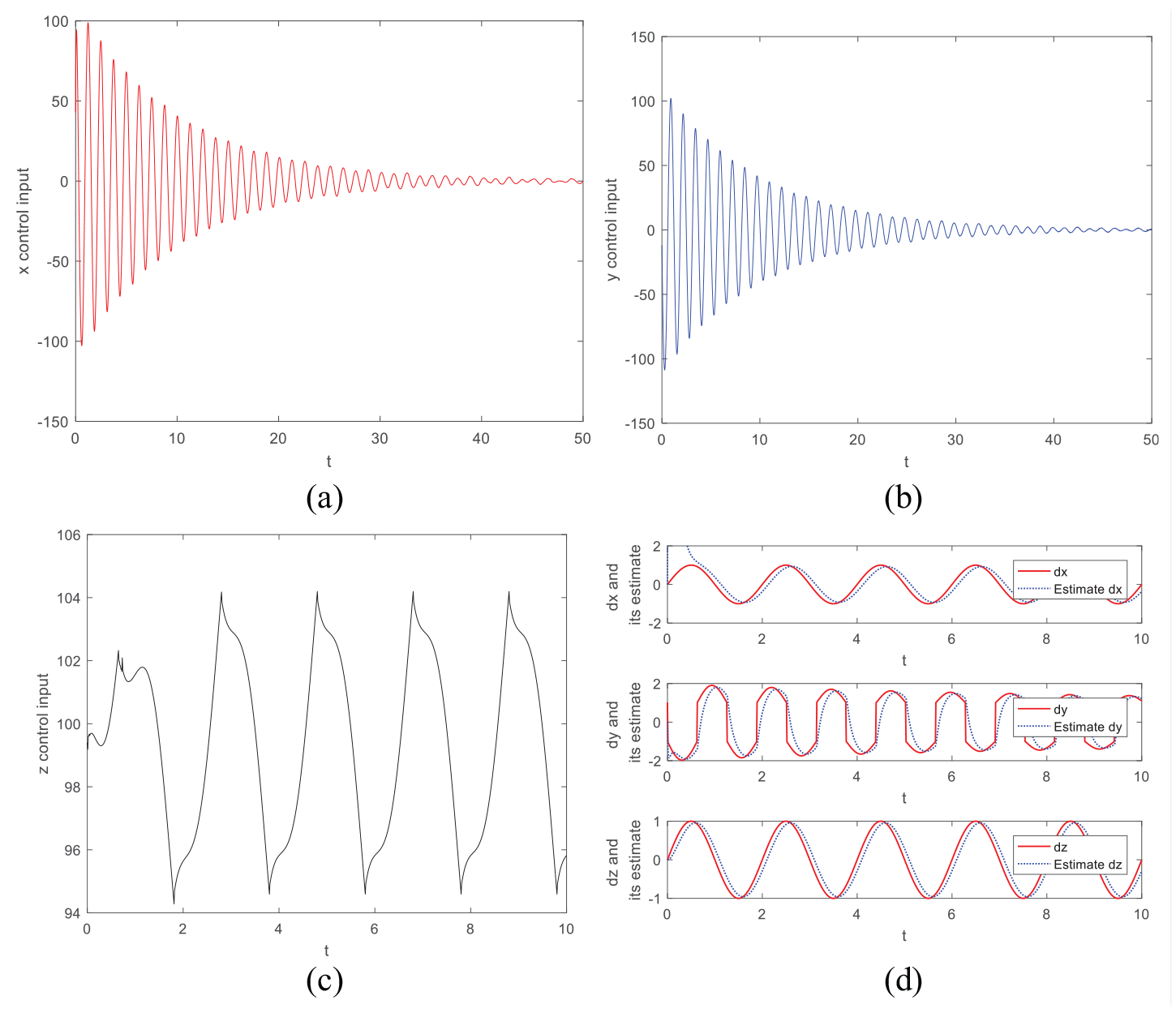
Simulation effect of single axis SMC with disturbance observation: (a) SMC control signal of
By comparing the simulation results in Figures 5 and 6, it can be seen that when there is no disturbance observer, a large switching gain value is required to eliminate the influence of disturbance, and the chattering of sliding mode control signal is very obvious. The disturbance observer is used to observe the disturbance signal, the disturbance is well estimated, the chattering of the sliding mode control signal is obviously improved.
In order to better reflect the signal axis tracking control performance, we will compare the proposed sliding mode disturbance observer controller with the following robust controller. Controller is designed as

(a)
From the comparison figure, it can clearly that the proposed sliding mode and disturbance observer has better control performance than the PD robust controller in single axis tracking, which has smaller tracking error.
Contour control performance analysis of adaptive fuzzy PID-CCC
In the following experiment, under the premise of disturbance observation, the contour control effect of the cross coupled controller based on adaptive fuzzy PID and the conventional PID are compared and analyzed, to verify the superiority of the proposed adaptive fuzzy PID control algorithm. After lots of debugging, the conventional PID controller parameters are chosen as

(a) Tracking error of
where, Figure 8(a)–(c) are three-axis tracking error respectively, the red and blue lines represent the tracking error under the action of adaptive fuzzy PID and general PID control respectively; Figure 8(d) represents the contour error in two cases; Figure 8(e) shows the contour tracking, in which the red line is the reference contour, blue line is the contour under the action of the adaptive fuzzy PID-CCC, and the green line is the contour under the action of general PID-CCC.
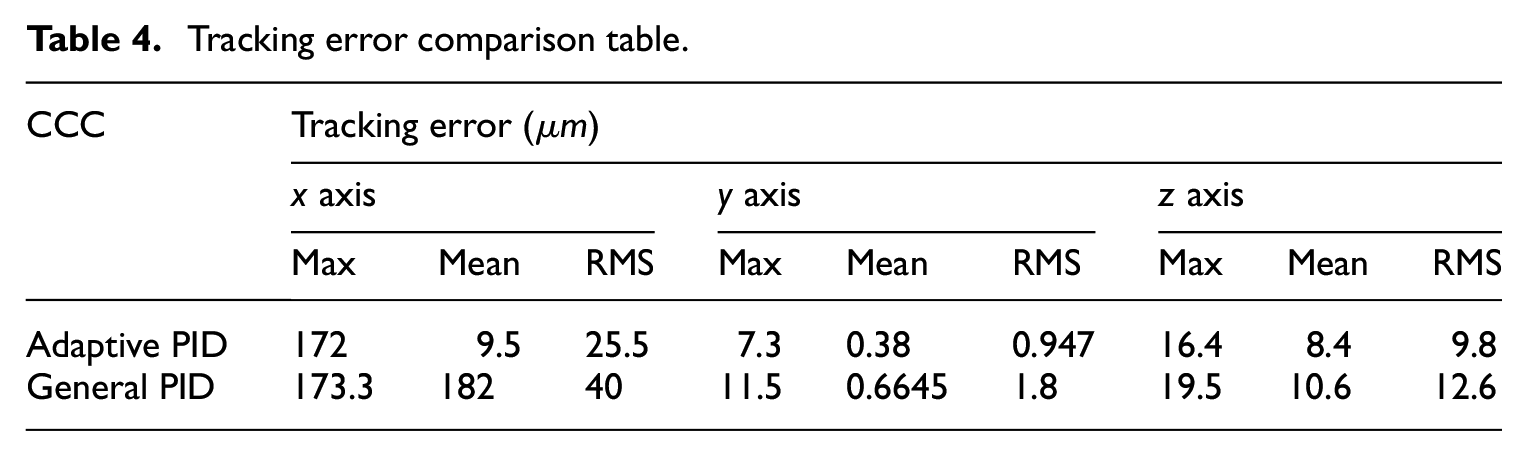
The maximum, average, and root mean square values of tracking error and contour error in both cases are shown in Tables 4 and 5, respectively.
Tracking error comparison table.
Contour error comparison table.
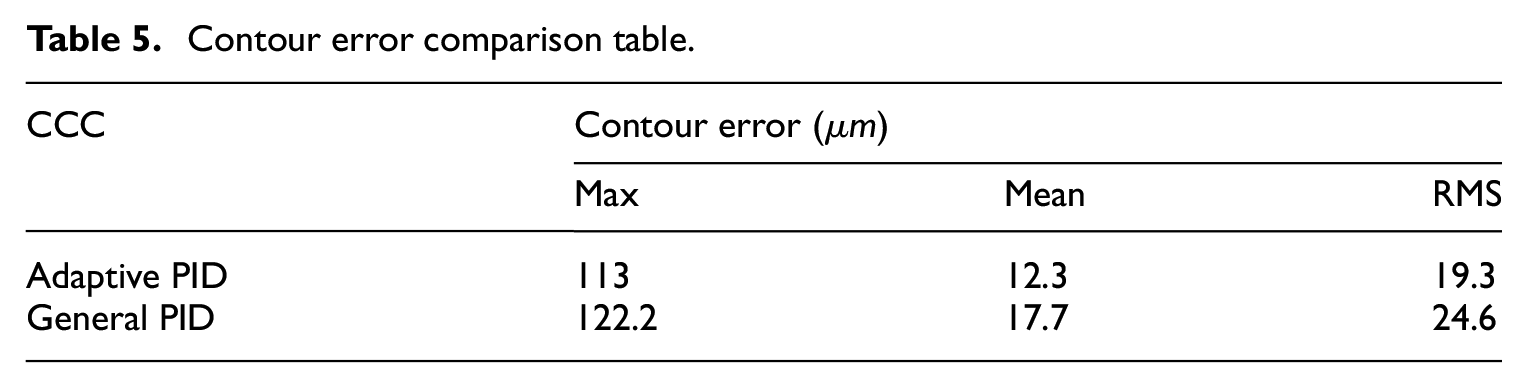
As can been seen in Table 4, compared with the conventional PID-CCC control, adaptive fuzzy PID-CCC control can significantly reduce the tracking error of each axis. Taking the y-axis as an example, the maximum tracking error is reduced from 11.5 to 7.3, the error is reduced by 36.5%, the average tracking error is reduced from 0.6645 to 0.38, down by 42.8% and the root mean square error is reduced from 1.8 to 0.947, down by 47.4%. The contour accuracy is also obviously improved. It can be seen from Table 5 that the maximum contour error has been reduced from 122.2 to 113; the average contour error has been reduced from 17.7 to 12.3, down by 30.5%, and the RMS value of contour error has been reduced from 24.6 to 19.3, down by 21.5%.
Conclusions
For contour control of the three-axis motion platform driven by the permanent magnet linear synchronous motor servo system, a control strategy combining a sliding mode controller, a disturbance observer and a cross coupled controller based on adaptive fuzzy PID control is proposed. Among them, the disturbance observer can effectively eliminate the influence of external disturbance, reduce the chattering of sliding mode control, and ensure the single-axis accurate tracking. The cross coupled controller is used to eliminate the influence of the dynamic characteristics mismatching and parameter difference of each axis. The self-adaptive fuzzy controller is used to adjust the PID control parameters on line, so as to solve the problem of difficult PID parameter setting. The simulation results clearly demonstrate the effectiveness of the proposed control method. In the future research, the authors will study more excellent contour control methods, and further apply them to five-axis motion control system.
Footnotes
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This research was supported by Joint Fund of Zhejiang Provincial Natural Science Foundation, Grant No. LTY20E050001.
Data availability
The data used to support the findings of this study are included within the article.