
Abstract
A new nonlinear rotor model supported by the rolling bearing is established under the consideration of the bearing with waviness fault, the unbalanced excitation, the nonlinear Hertz contact force, the varying compliance vibration, and, especially, the physical nonlinear stiffness of the shaft material. The expression with cubic nonlinear terms is adopted to characterize the physical nonlinear stiffness of the shaft material, and the sinusoidal wave is applied to describe the shape characteristics of the waviness fault. The dynamic equations of motion for the new model are developed, and the calculation example of the rotor system supported by the bearing JIS6306 is solved by the variable step-size Runge–Kutta methods to study the effect of the waviness, the clearance, the mass eccentricity on the dynamic behavior. The research results show that growth of the amplitude for the waviness changes the energy distribution of the vibration process; the enlargement of bearing clearance will reduce the stability of the system; the increase in the number of the waviness will make the order of the frequency components changed; for the nonlinear stiffness bearing-rotor system with waviness fault, the augment of mass eccentricity will enhance the impact of the nonlinear stiffness on the system.
Introduction
The rotor and its support are complex dynamic system. The rolling bearing is a common support of the rotor. Although the manufacturing technology is more and more advanced, the bearing waviness is inevitable in the production and manufacturing. The inner race and outer race of the rolling bearing may produce certain waviness due to the limitation of the manufacturing process. The existence of waviness has a great impact on the dynamic response of the system and can generate a lot of noise. The vibration and noise are harmful to the equipment and workers. Therefore, it is necessary to study the rotor system with waviness fault.
In order to study the nonlinear characteristics of the rotor system supported by the rolling bearing with waviness, it is essential to use mathematical method to describe the model of the rolling bearing with waviness. At present, scholars usually use two methods to describe the waviness of rolling bearing. The first method is to define the characteristics of waviness by the width of Hertz contact surface. The second method is that the waviness is defined according to the number of the waviness in the whole race. In the research of the rolling bearing-rotor system with the waviness, Harsha et al. 1 and Kankar et al. 2 established the rolling bearing rigid rotor model considering the bearing waviness; they found that there is a regular relationship between the certain frequency combination in the spectrum and the wave number; they analyzed the stability of the system, and the research revealed that the number of rolling elements and the wave number affect the dynamics of the rotor system. Yusof and Ripin 3 found that the surface roughness and the lubrication state of the raceway directly affect the vibration strength of the system.
Some scholars have studied the dynamics of the rolling bearing-rotor system with waviness fault. Wang et al. 4 investigated the nonlinear dynamics behaviors of a rotor rolling element bearing system with waviness. The research shows that the system may have the chaos state, the period doubling bifurcation, and the quasi-periodic nature as the rotational speed increases. Rajesh et al. 5 conducted a nonlinear vibration analysis of angular contact ball bearing of a rigid rotor under the consideration of the waviness of the ball and race. Based on the computed results, in presence of the lubricant film at the contacts of balls and races, vibrations reduce significantly. Jang and Jeong 6 presented a nonlinear model to analyze the ball bearing vibration with waviness in a rigid rotor supported by ball bearings. Li et al. 7 studied the effects of the surface waviness on the nonlinear dynamic performance of a gas bearing-rotor system. The coupling vibration with the elastomer was considered. The results show that the existence of the waviness can improve the stability of the system obviously. Babu et al. 8 developed six-degree-of-freedom rigid rotor-bearing model, considering the waviness on the surface of inner race, outer race, and ball. Based on the computed results, the influence of inner race is relatively more on the vibrations in comparison to waviness of the outer race and ball. Bai et al. 9 built five-degree-of-freedom rotor-bearing system to study the effects of the axial preload on the nonlinear dynamic characteristics of a flexible rotor supported by angular contact ball bearings. Harsha et al. 10 dealt with the dynamic responses of the rotor supported by the ball bearings under the consideration of the surface waviness, the Hertzian contact force, the varying compliance (VC), and the internal radial clearance. Harsha and Nataraj 11 studied the nonlinear dynamic analysis of the high-speed ball bearings with the waviness and the unbalanced rotor. The numerical integration technique Newmark β with Newton–Raphson method was used to solve the nonlinear differential equations iteratively. The results show that the interaction of the ball passage and the unbalanced force results in low amplitude region of instability and chaos. Hou et al. 12 focused on the nonlinear response in a rotor ball bearing system with internal clearances and the contact forces. The results obtained in this article will contribute to a further understanding of the complex nonlinear dynamic behaviors of the rotor systems.
Modaresahmadi et al. 13 modeled a system of a flexible rotor and two ball bearings under the consideration of the waviness to study the dynamic responses. Jang and Jeong 14 presented an analytical method to calculate the characteristics of the ball bearing under the effect of the waviness in its rolling elements and the centrifugal force and the gyroscopic moment of the ball. The waviness of rolling element was modeled by using sinusoidal function. Kankar et al. 15 applied the approximate response surface method (RSM) to analyze the effects of the design and operating parameters on the vibration signature of a rotor-bearing system. They considered the distributed defects such as the internal radial clearance and the surface waviness of bearing components. Bai and Xu 16 presented a general dynamic model to study the dynamic properties of rotor system supported by ball bearings under the effects of clearance and bearing running surface waviness. The cage speed was considered a time-variation parameter related to the orbital speed of balls. The numerical results of the research were in good agreement with the prior authors’ experiments. Nataraj and Harsha 17 proposed an analytical model to study the nonlinear dynamic behavior of an unbalanced rotor-bearing system due to cage run-out. The contact between the rolling elements and races was regarded as the nonlinear springs, and the system was analyzed for the varying numbers of balls. The results show that the response falls into three regions, the periodic motion, the quasi-periodic oscillation, and the chaotic response.
The rotor system composed of the nonlinear elastic material shaft has more complex nonlinear dynamic characteristics. Cveticanin 18 analyzed the main resonance response of the rotor system with the nonlinear elastic material under the periodic excitation by means of the average method, and carried out the experiments of the shaft with three different materials (iron, aluminum alloy, and wood). The research work confirmed that there exists the phenomenon of vibration mutation in the rotor system with nonlinear stiffness. Luo et al. 19 established a rotor system model with the fixed ends, considered the nonlinear characteristics from the nonlinear stiffness of the rotor shaft, and analyzed the unbalanced response of the rotor system by numerical integration method.
Much research has been devoted to investigating the effect of only one nonlinear factor on the dynamics. The two combined nonlinear factors from the rolling bearing and from the stiffness of the shaft will be studied in this article. A new nonlinear rotor model supported by the rolling bearing is established under the consideration of the bearing with waviness fault, the unbalanced excitation, the nonlinear Hertz contact force, the VC vibration, and, especially, the physical nonlinear stiffness of the shaft material. Based on the new model, the effects of the waviness, the clearance, and the mass eccentricity on the dynamic behavior are studied.
Modeling of the bearing-rotor system
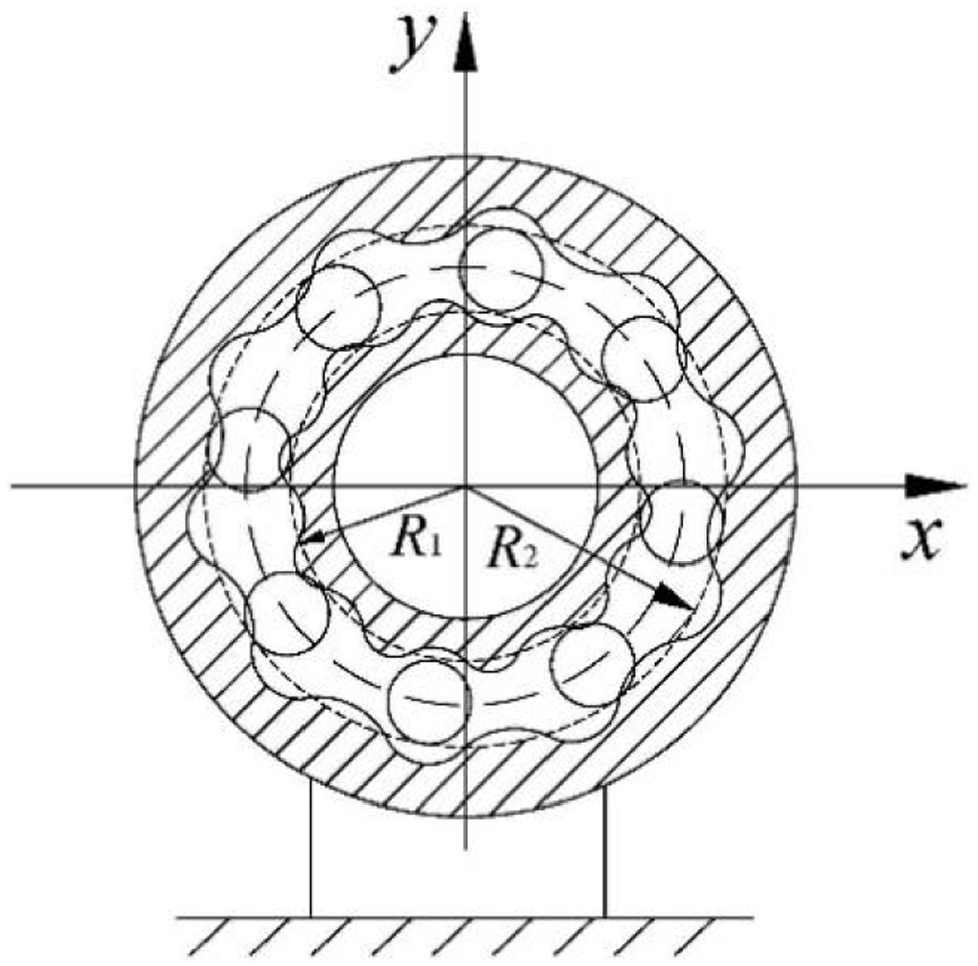
It is crucial to model the analytical model of the bearing-rotor system. The first step is to build the model of the rolling bearing. Figure 1 is the schematic diagram of the rolling bearing model. The rolling bearing includes the inner race, the outer race, the middle rolling elements, and the cage, and, here, the rolling element is rolling ball. The ball in the track has both the revolution around the center of the bearing (O1) and the rotation around the center of the ball. The initial position of the mass center for the rotor at the bearing is O1. During the operation of the rotor, the position of the mass center for the rotor is O2. As shown in Figure 1, the inner race radius is R1, and the outer race radius is R2. The outer race is fixed to the bearing pedestal and its vibration is ignored; the inner race is connected to the shaft, and then the speed of the outer race for the bearing is v2 = 0; if the speed of the inner race for the bearing is equal to the speed of the rotor, then the speed of inner race


The schematic diagram of the rolling element bearing.
Let R3 be the radius of the ball revolution, and the angular velocity of the ball revolution is

Therefore, the position angle of the nth (n = 1, 2, …, n) element is

Therefore, the radial contact deformation between the nth element and the inner race is

where

where


The resultant force of the contact force between each element and the inner race is the force of the rolling bearing on the shaft, consequently


where
Other import model for this study is the rotor system. Based on the rolling element bearing, the rotor model will be built in this section. The shaft of the rotating machinery is made of copper, aluminum, or the other materials, and its stiffness is usually nonlinear. According to the research results of Cvetanin, the stiffness of the shaft increases with the increase of displacement, and its relationship between the stiffness and the displacement can be expressed by the linear equation with the cubic term. Figure 2 is the schematic diagram of the bearing-rotor system, and the elastic restoring force of the system is


In this model, the rotor is simplified into three lumped masses. The positions of points P, R, and L are, respectively, located at the mass center of the disk, the mass center of the rotor at the right bearing, and the mass center of the rotor at the left bearing.


The horizontal and the vertical relative displacement differences between point P and point L are, respectively, as follows



Schematic diagram of the bearing-rotor system.
According to Newton’s second theorem, the dynamic equation of the system can be obtained
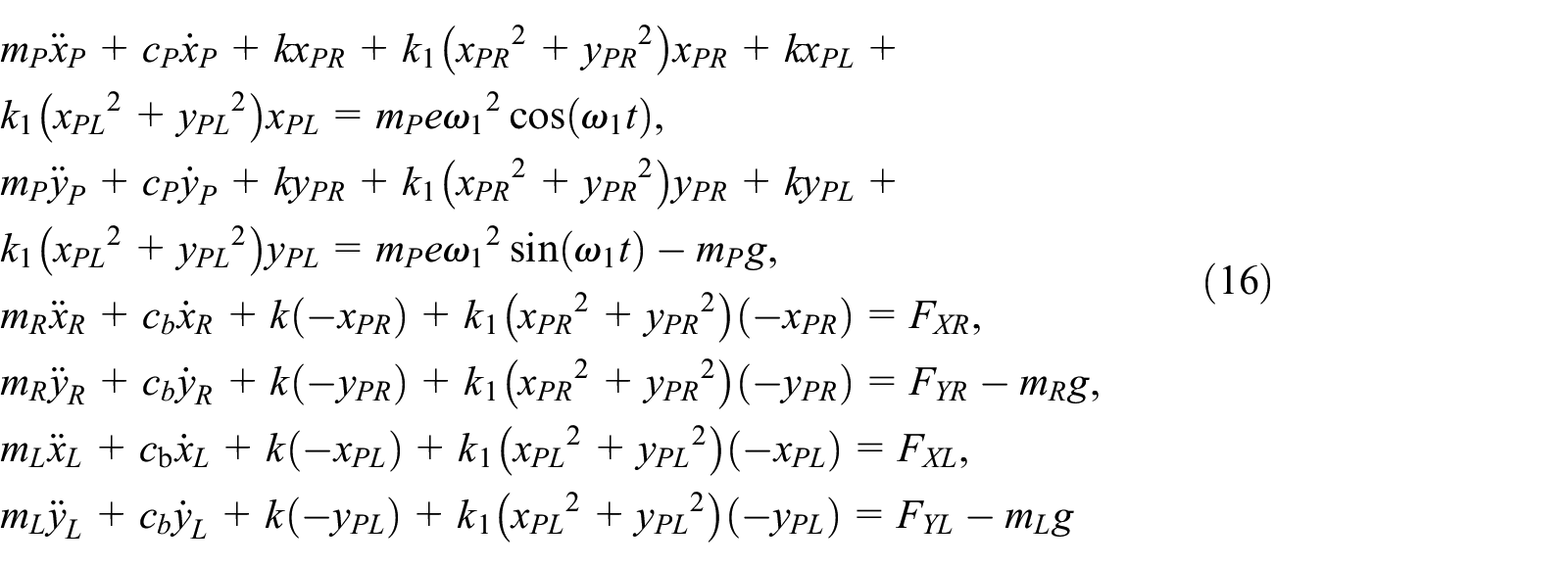
where e is the eccentricity of the disk;
Dynamic model of rolling bearing-rotor system with waviness
In order to study the nonlinear characteristics of the rotor system supported by the rolling bearing with waviness, it is necessary to use mathematical method to describe the model of the rolling bearing with waviness. Sinusoidal function is used to describe the shape characteristics of the waviness. Figure 3 is the schematic diagram of the model of the rolling bearing with waviness.
Schematic diagram of rolling bearing with waviness.
If the amplitude of the inner race waviness is A1, then the formula of the waviness is

where A0 is the initial amplitude of the waviness for the inner race,

where R1 is the radius of the inner race for the bearing and Nw1 is the wave number of the inner race. Similarly, the waviness of the outer race is

The radial contact deformation between the nth element and the inner race for the rolling bearing-rotor system with waviness fault is

Analysis of dynamic characteristics
Under the comprehensive influence of the nonlinear factors such as the bearing clearance, the nonlinear Hertz contact force, the VC vibration, and the nonlinear stiffness of the shaft, the dynamic behavior of the rolling bearing-rotor system is extremely complex. It is of great significance to study the rolling bearing waviness on the dynamic response of the rotor system.
The model of the rolling bearing selected in this article is JIS6306. The main parameters are as follows: the radius of the inner race R1 = 40.1 mm; the radius of the outer race R2 = 63.9 mm; the number of balls N = 8; the Hertz contact stiffness
Calculation parameters of the rotor system.

Influence of bearing waviness on dynamic behavior
In order to study the difference of the rotor-bearing system with waviness from the system without waviness, the bifurcation diagrams of the two systems are drawn to analyze the nonlinear behaviors. Introducing

Bifurcation of the horizontal component of the disk displacement to the rotating speed n when e = 0, c0 = 0 (Bearing model JIS6306): (a) without waviness, (b) with waviness.
The initial amplitude of the waviness
The effect of the initial amplitude for the waviness on the response of the system is studied under the premise of keeping the other parameters unchanged. The calculation will be conducted according to Table 2 with the rotation speed
Analytical parameters for the bearing waviness on the system.

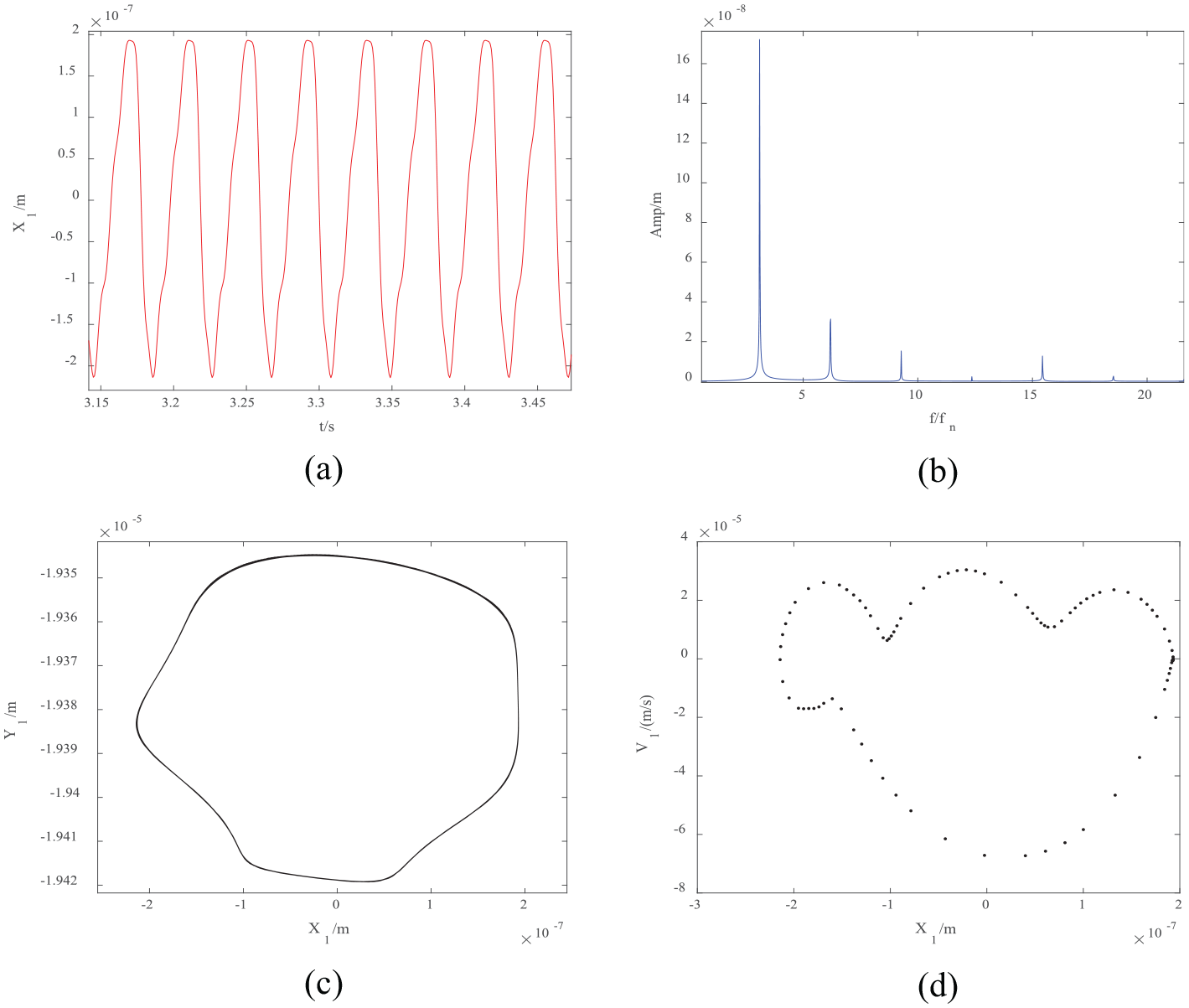
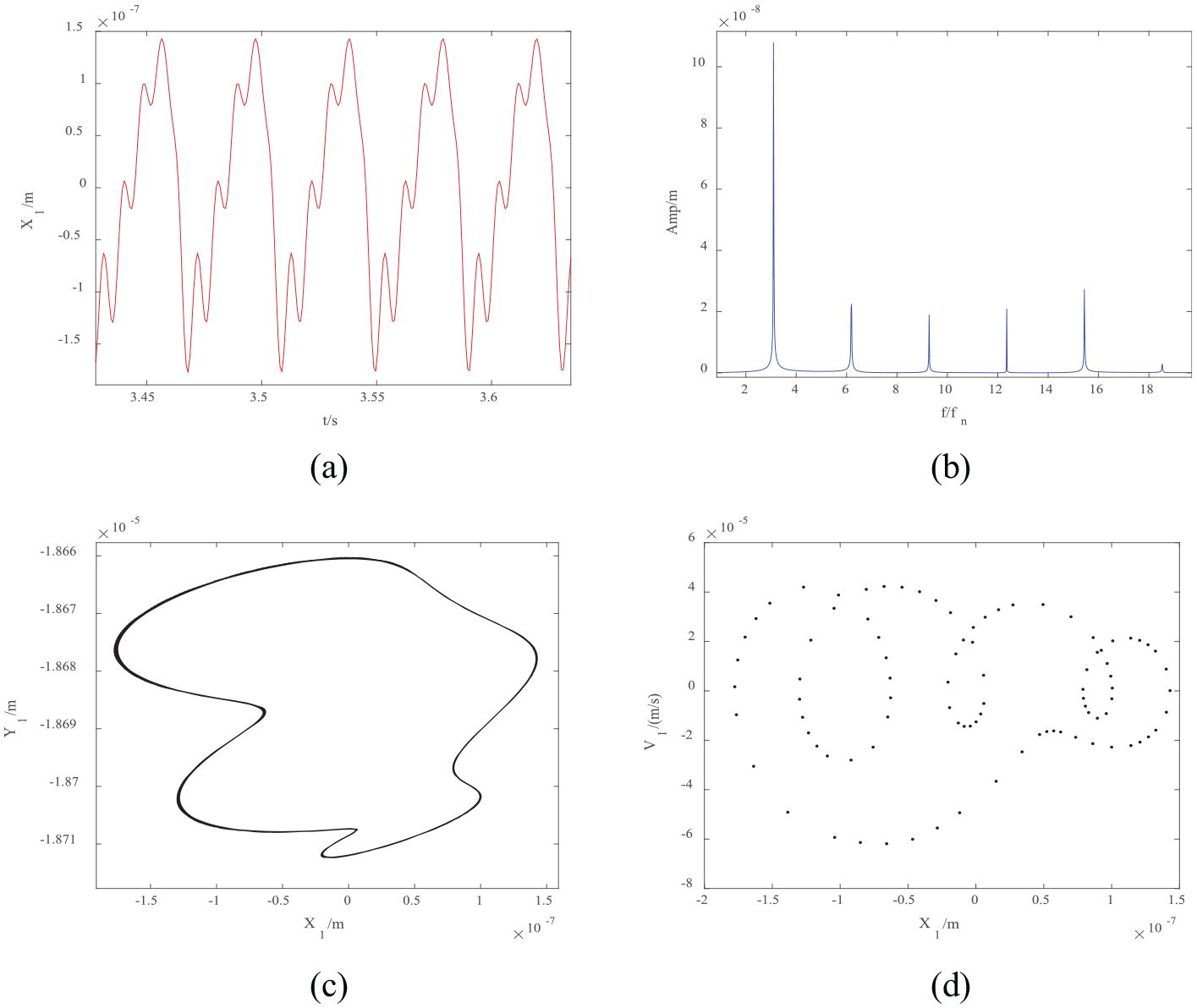
Figure 5 shows the vibration response at the center of the disk when the initial amplitude A0 is 2 × 10−3 mm, the amplitude A is 1 × 10−3 mm, and the waviness number NZ is 8. It can be seen from Figure 5(a) and Figure 5(c) that the system motion has classic periodicity, and the orbit of the shaft center is a basically typical ring. Figure 5(d) shows the ring with three concaves. Figure 5(b) shows the VC vibration frequency FVC and its 2, 4 times, and the frequency ratio is 3.08, which is equal to the rolling element bearing parameter BN. The order for the components of the frequencies is 1X-3X-5X-2X-4X. It can be seen from Figure 5 that the vibration of the system is periodic at this time. Figure 6 shows the vibration response at the center of the disk when the initial amplitude A0 = 5 × 10−3 mm, the amplitude A = 1 × 10−3 mm, and the ripple number NZ = 8. It can be seen from Figure 6(a) and (c) that the system motion has certain periodicity, and the motion of the locus is more complex and more chaotic than that of Figure 5. Figure 6(d) shows four continuous rings which correspond to the four wave crest of Figure 6(a), and the Figure 6(b) shows the VC vibration frequency FVC and its 2, 3, 4, 5 times. The order for the components of the frequencies is 1X-4X-3X-2X-5X. Compared with Figure 5, Figure 6 has obvious frequency multiplication and the response amplitude has doubled, and the order has changed. Although the overall motion state is still periodic, the motion form is more complicated. It can be seen that the larger the initial amplitude of waviness is, the more complex the motion state of the system is, including the orbit of center and the frequency characteristics, as seen in Figure 6(b) and (c).

(a) Time history, (b) spectrum, (c) orbit of shaft center, (d) Poincaré section when

(a) Time history, (b) spectrum, (c) orbit of center, (d) Poincaré section, when
The amplitude of the waviness
Figure 7 is the response diagram of the system without considering the nonlinearity of bearing clearance. When the maximum amplitude is A = 1 × 10−3 mm, it can be seen from Figure 7(a) and (c) that the motion of the system is typical periodic. It can be seen from Figure 7(b) that the maximum amplitude of the system appears at 3.08 times of the working frequency, that is the VC vibration frequency FVC; there exist 2, 3, 5 times of the VC vibration frequency, and the order of the components of the frequencies is 1X-2X-3X-5X-others. Figure 7(d) is the Poincaré section. These are the classic vibration characteristics of the periodic motion.
(a) Time history, (b) spectrum, (c) orbit of center, (d) Poincaré section when
Figure 8 is the response diagram of the system with waviness fault when the maximum amplitude is A = 3 × 10−3 mm. It can be seen from Figure 8(a) and (c) that the motion state of the system is also periodic. Figure 8(c) shows a larger corrugation shape than that of Figure 7(c), and the shape corresponds to the shape of the time history, as seen in Figure 8(a). Essentially, it is from the increase of the amplitude of the waviness. Figure 8(d) shows five hybrid rings, and the motion form is more complex than that in Figure 7. Figure 8(d) is the Poincaré section. In Figure 8(b), the number of the VC vibration frequency multiplication is more than that of Figure 7, and the order of the components of the frequencies is 1X-5X-4X-2X-3X. To sum up, the effect of the maximum amplitude of the waviness on the system motion is mainly to change the order of the components of the frequencies, make the process of the periodic vibration more complicated, and make the orbit of center complex. Augment of the amplitude of the waviness changes the energy distribution of the vibration process. In engineering practice, enlargement of the waviness level may lead to the increase of the wear and noise. The study for the effect of the waviness on the vibration provides a calculation tool for control of the vibration and noise.
(a) Time history, (b) spectrum, (c) orbit of center, (d) Poincaré section when
The number of waviness
Figures 9 and 10 are the response diagram of the system when the number of waviness is 7 and 10, respectively. It can be seen from Figure 9(a) and (c) that the system is periodic, and the shape of the orbit trace is approximate circular where the upper part and the lower part have corrugation shape, as seen in Figure 9(c). Figure 9(b) shows 1–4 times of the VC frequency; in all the frequencies, the amplitude of 1 time frequency of FVC is the largest, and the 4 times frequency is the second; and the order is 1X-4X-3X-2X. Figure 9(d) shows a ring with three concaves, two of them are in the upper part and the other one is in the lower part. Figure 10 shows the time domain diagram, the spectrum diagram, the chart of axes track, and the Poincaré map of the system with the number of waviness NZ = 10. It can be seen that the system is also in the state of the periodic motion. Compared with Figure 9, Figure 10(a) shows step-like shape. The axes track in Figure 10(c) is irregular motion, and the overall motion is still periodic motion, that is, the system repeats the irregular motion periodically. This confusion is due to a change in the number of the waviness. Figure 10(b) shows 1–6 times of VC vibration frequency, of which the frequency amplitude of 1 time for FVC is the largest, the 2 times of FVC is second instead of the 4 times in Figure 9(b), and the order has changed to 1X-2X-4X-3X-5X-6X. This change is related to the number of waviness, that is, the number of waviness has a direct impact on the frequency components of the system. Figure 10(d) shows three concaves where one concave is in the upper part and the other two concaves are in the lower part, which is opposite to Figure 9(d). To sum up, the increase in the number of waviness will make the motion of system complicated, and the order of the frequency components has changed.

(a) Time history, (b) spectrum, (c) orbit of center, (d) Poincaré section, when

(a) Time history, (b) spectrum, (c) orbit of center, (d) Poincaré section, when
The clearance of bearing
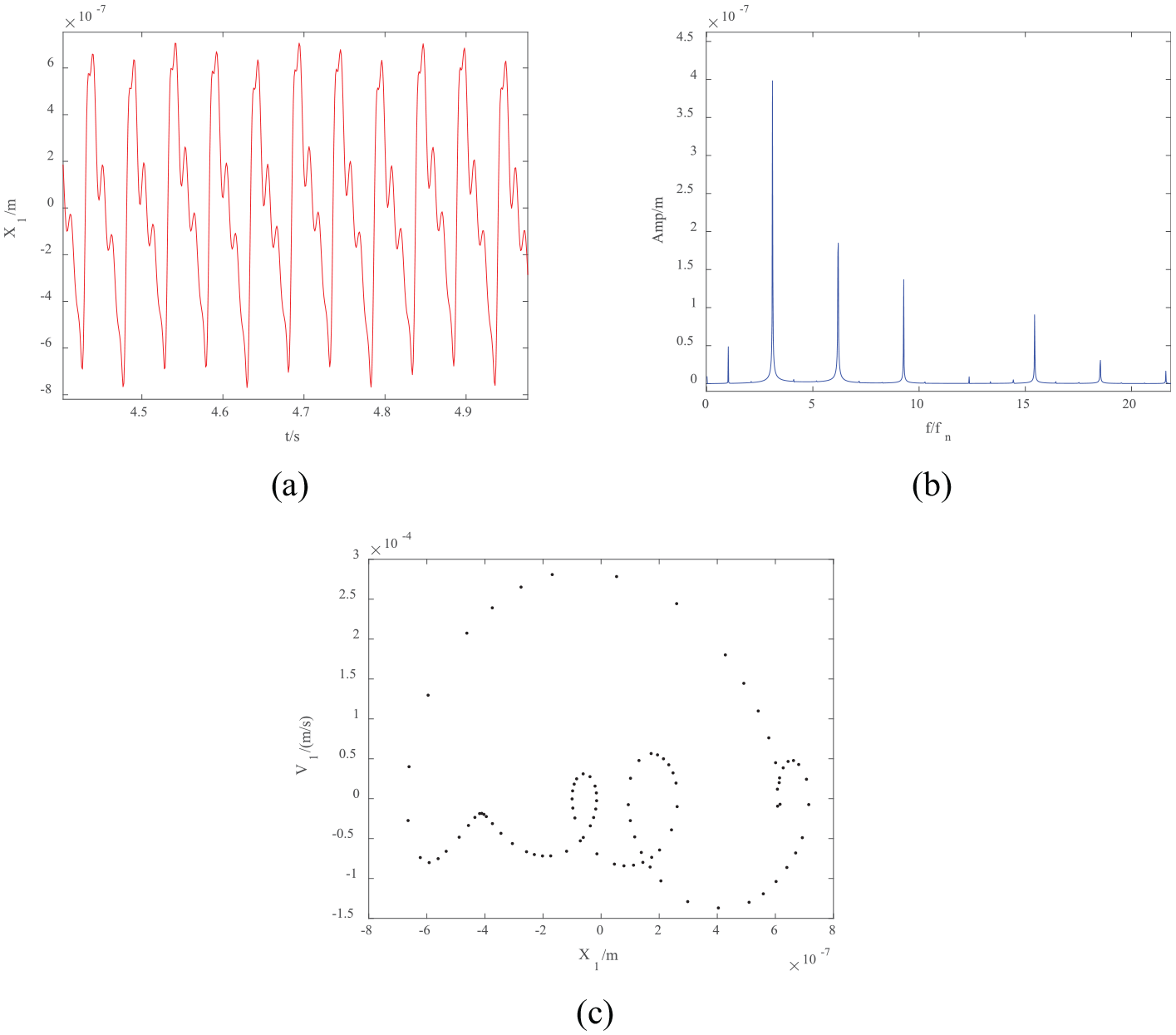
In this section, the influence of the bearing clearance on the rotor system with waviness is studied. The initial amplitude A0 is 10 μm, the periodic amplitude A is 20 μm, the waviness number Nz is 8, the imbalance e is 0.01 mm, and the rotor speed ω1 is 40 rad/s. The rotor-bearing system with the waviness and with the cubic nonlinear stiffness is focused on in this article. To compare the physical nonlinear stiffness of the shaft material with the linear stiffness, the linear and nonlinear stiffness systems are investigated in this section (see Table 3).
Calculation parameters comparison between linear and nonlinear systems.
Linear stiffness system
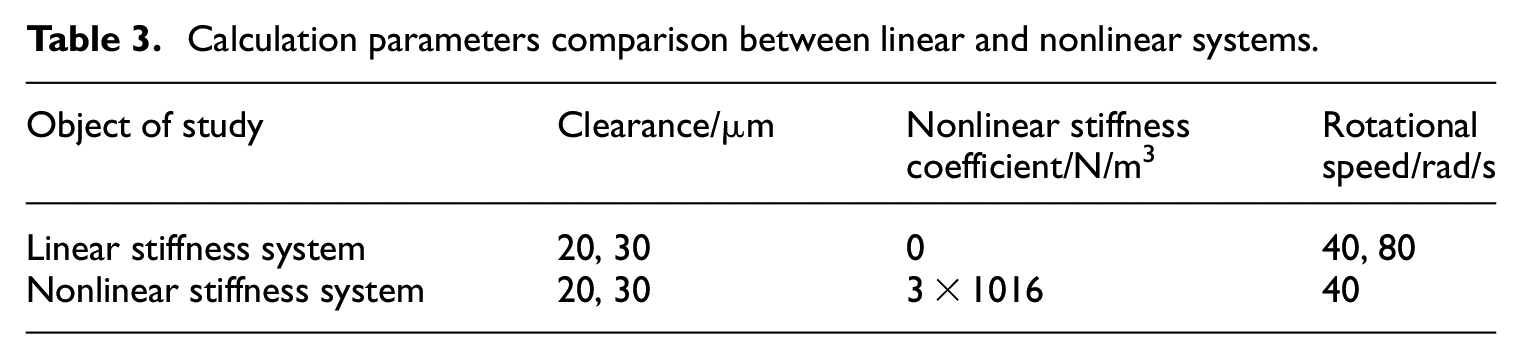
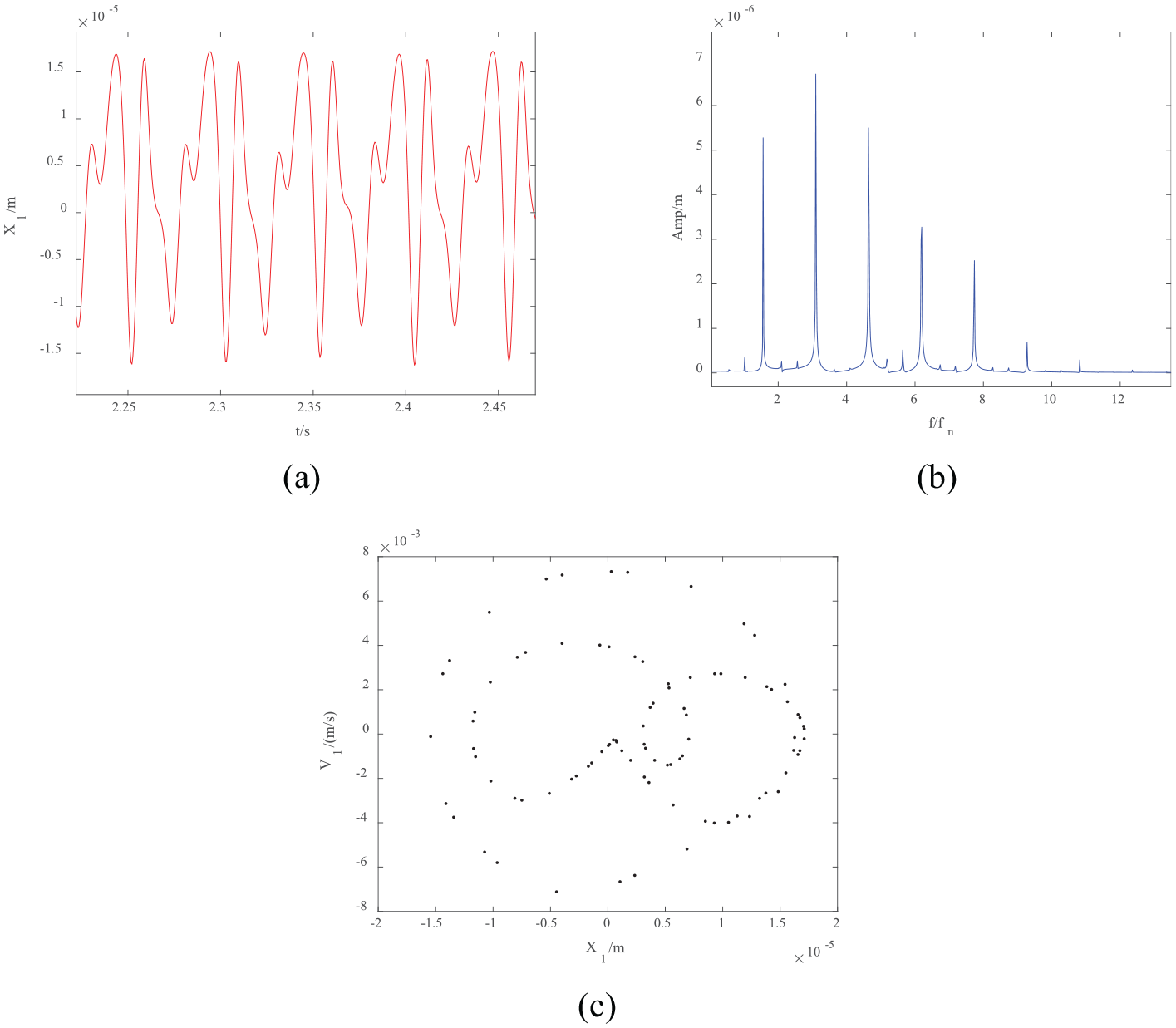
The dynamic characteristics of the system with linear stiffness will be analyzed in this section. Figures 11 and 12 show the time history, the spectrum diagram, and the Poincaré diagram of the horizontal direction for the blade when the rotating speed ω1 = 40 rad/s, the bearing clearance c0 = 20 μm/30 μm, the initial amplitude of the waviness A0 = 10 μm, the periodic amplitude A = 20 μm, the number of the waviness NZ = 8, and the imbalance e = 0.01 mm. It can be seen from the Figure 11(a) that under the influence of waviness, there are three wave peaks in each cycle of the rotor. At this time, the working frequency of the system is fN = 6.37 Hz, and the peak value corresponding to this frequency is displayed in Figure 11(b). The VC vibration frequency produced by the rolling bearing is FVC = 3.08 and fn = 19.61 Hz. Figure 11(b) mainly reflects the VC vibration frequency and its frequency multiplication. Figure 11(c) shows its Poincaré diagram. It can be seen from Figure 12(a) that the response of system has bigger peaks. Figure 12(b) mainly shows the frequency division and 2 times of the frequency corresponding to the operating frequency FN = 6.37 Hz. Other frequency components include the frequency multiplication, the frequency division, and the combined frequency of the working frequency and the VC vibration frequency. Figure 12(c) shows its Poincaré section. To sum up, for the system with waviness, the increase of the rolling bearing clearance will make the motion track more complex, and the frequency component will gradually change from VC vibration frequency to the working frequency. Figure 13 is drawn under the parameters: the rotating speed ω1 = 80 rad/s, the bearing clearance c0 = 20 μm/30 μm, the initial amplitude of waviness A0 = 10 μm, the periodic amplitude A = 20 μm, the number of waviness NZ is 8, and the imbalance e = 0.01 mm.

(a) Time history, (b) spectrum, (c) Poincaré section when ω1 = 40 rad/s,

(a) Time history, (b) spectrum, (c) Poincaré when ω1 = 40 rad/s,
(a) Time history, (b) spectrum, (c) Poincaré section when ω1 = 80 rad/s,
Compared with Figure 13, it can be seen from Figure 14(a) that the motion form of system is more complex and has certain stability. In Figure 14(b), the frequency amplitude related to the VC vibration frequency FVC is larger compared with other peaks, and the frequency amplitude corresponding to the working frequency FN is smaller. The results show that the increase of the bearing clearance and the rotating speed will reduce the stability of the system and increase the amplitude of the vibration response.
(a) Time history, (b) spectrum, (c) Poincaré section when ω1 = 80 rad/s,
Nonlinear stiffness system
Due to the existence of nonlinear stiffness for the shaft, the displacement and elastic restoring force of the system are nonlinear stiffness. The influence of bearing clearance on the dynamic characteristics of the nonlinear stiffness system is different from that of the linear stiffness system.
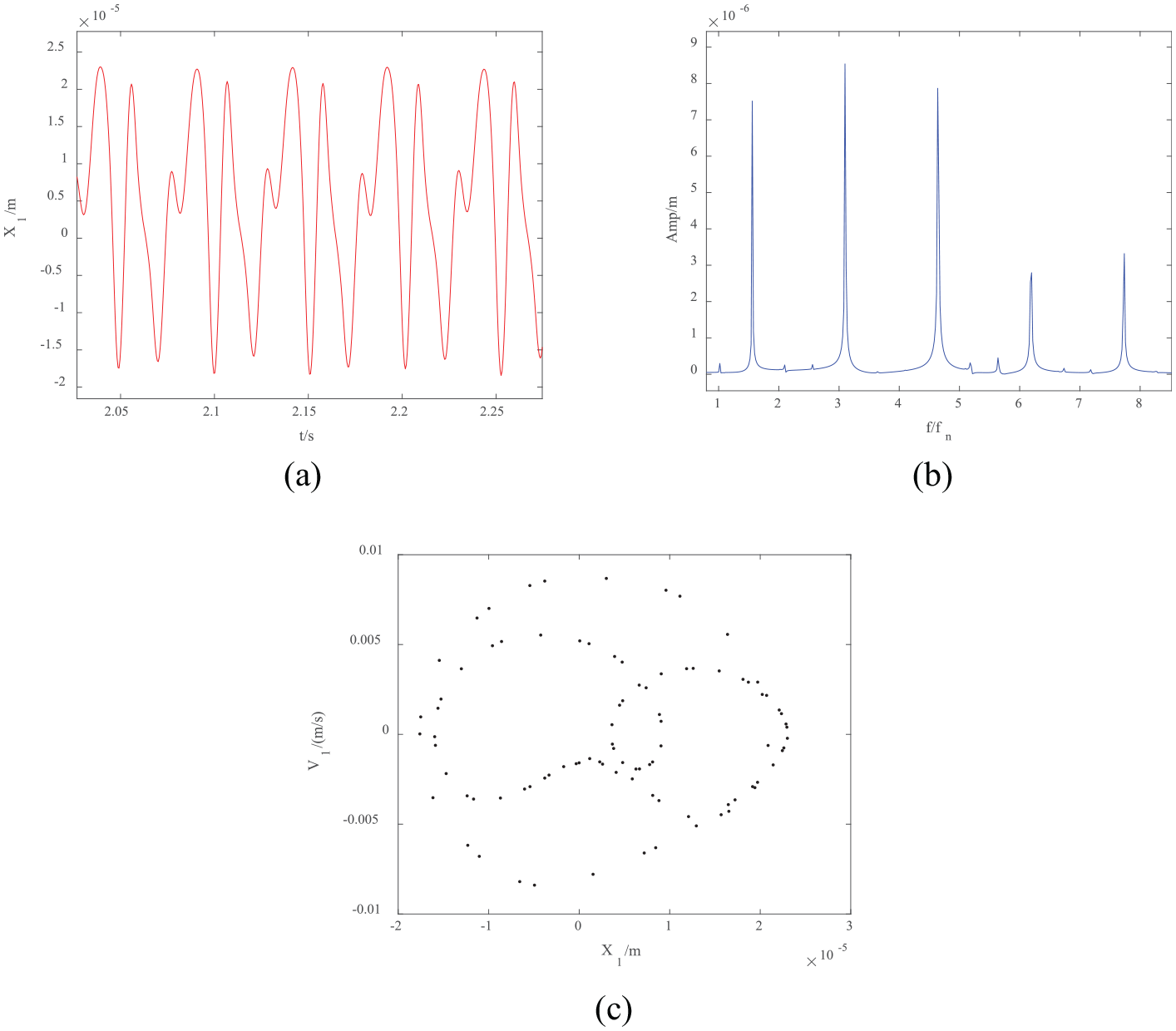
The nonlinear stiffness coefficient is K1 = 3 × 1016 N/m3, and Figure 15 shows the time domain diagram, the frequency domain diagram, and the Poincaré section of the horizontal direction of the blade center when the rotational speed ω1 = 40 rad/s, the bearing clearance c0 = 20 μm, the initial amplitude of the waviness A0 = 10 μm, the periodic amplitude A = 20 μm, the number of waviness NZ = 8, and the imbalance e = 0.01 mm. From Figure 15(a), it can be seen that the motion of the system at this time is irregular and has certain stability. Figure 15(c) shows that there is a concave in the lower part, and it can be seen that the system is in the state of quasi-periodic motion. Figure 15(b) shows that the frequency FVC and its multiplication are the main frequency components, and the amplitude of the working frequency is smaller than that of the VC vibration frequency. Figure 16(a) shows that the vibration of the system has periodicity, but the stability is not good enough. Figure 16(c) shows some rings. Figure 16(b) shows five frequency components, of which the frequency of VC vibration is the main frequency component. Figure 17(a) is the time history when the system speed is ω1 = 80 rad/s and the bearing clearance c0 = 20 μm. Figure 17(b) shows that the VC vibration frequency FVC and its multiplication are the main frequency components. Other frequency components include the multiplication of the working frequency FN, the multiplication of VC vibration frequency FVC and the combination of this two type of frequencies. The continuous spectrum appears near the multiplication of the working frequency. Figure 17(c) has two rings, which shows that the system is in the state of quasi-periodic motion at this time. The existence of bearing clearance makes the motion of the nonlinear system more complex, and the motion state is in the state of quasi-periodic motion.
(a) Time history, (b) spectrum, (c) Poincaré section when e = 0.01 mm, ω1 = 40 rad/s,

(a) Time history, (b) spectrum, (c) Poincaré section when e = 0.01 mm, ω1 = 40 rad/s,

(a) Time history, (b)spectrum, (c) Poincaré section when e = 0.01 mm, ω1 = 80 rad/s,
Mass eccentricity
The influence of the mass eccentricity for the rotor on the system without waviness has been reported. The effect of the mass eccentricity of the rotor on the system with waviness is mainly analyzed in this section. Figure 18 is a bifurcation diagram of a waviness fault rotor system without and with mass eccentricity. The imbalance is e = 0 mm, e = 0.01 mm, the bearing clearance c0 = 5 μm, the waviness parameter is set as the number of waviness NZ = 8, the initial amplitude of the waviness A0 = 2 μm, and the maximum amplitude A = 2 μm. From Figure 18(a), it can be seen that the response of the system increases up to the rotational speed of 237 rad/s with a peak value, it is caused by the existence of VC vibration frequency. In the 1256–1793 rad/s stage, the system is in the state of chaotic motion, and in the other speed stages, the system is in the state of quasi-periodic motion, and it is due to the joint effect of VC vibration and the vibration induced by the waviness. Figure 18(b) shows that the system is in the state of quasi-periodic motion in the whole range of speed. In addition, when the rotating speed increase up to 805 rad/s, the rotor reaches the critical speed, the peak of response appears.
Bifurcation diagrams of the rotor-bearing system (a) without eccentricity and (b) with eccentricity e = 0.01 mm.
Table 4 is the research content of this section. The bearing clearance is c0 = 5 μm, the waviness parameter is set as the number of waviness NZ = 8, the initial amplitude of waviness A0 = 2 μm, and the maximum amplitude A = 2 μm.
Influence of the mass eccentricity on the response.
Linear stiffness system
Under the impact of unbalanced force, the dynamic response diagram of the linear stiffness rotor system is analyzed in this section.
Figure 19 shows the bifurcation diagram of the system when the imbalance e = 0.004 mm and e = 0.008 mm. It can be seen that Figure 19(a) shows two peaks in the system response with the increase of speed. The first is the peak value caused by the VC vibration, which appears near the 237 rad/s. In Figure 19(b), as the speed increases, the response also has two peaks. The peak value is larger than that of Figure 19(a), and the speed corresponding to the peak also increases. It can be seen that the augment of mass imbalance will lead to the increase of the response. Therefore, for the linear stiffness rotor system, the enlargement of the eccentricity will increase the response of the system.

Bifurcation diagrams of the rotor-bearing system when c0 = 5 μm, k1 = 0 N/m3, Nz = 8,
Nonlinear stiffness system
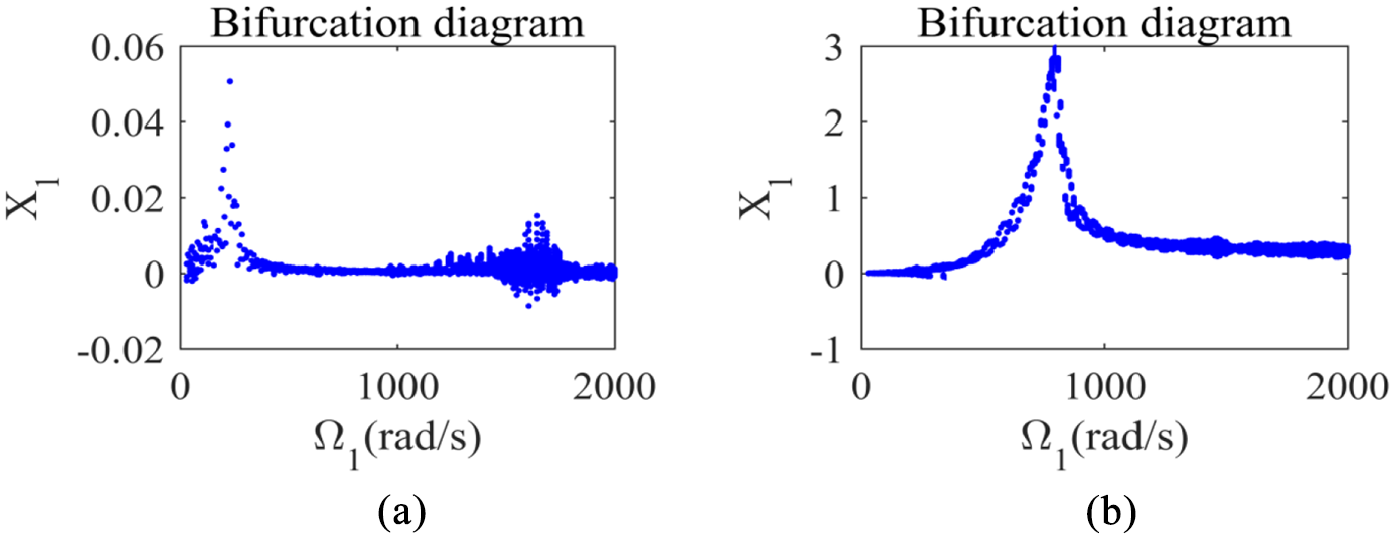
The influence of mass eccentricity on the motion characteristics of nonlinear stiffness system with waviness fault is different from that of linear stiffness system. Figure 20 is the bifurcation diagram of the nonlinear stiffness rotor system when the imbalance e = 0.004 and 0.008 mm. Compared with Figure 19(a), Figure 20(a) shows that the bifurcation phenomenon is in the range of 510–1256 rad/s; as the vibration response increases, the continuous bifurcation phenomenon appears; after 1256 rad/s, the chaos phenomenon appears. In Figure 20(b), with the increase of rotating speed, the system response increases, and the response growth is slow significantly near 628 rad/s. This is because the nonlinear stiffness of the shaft increases the system stiffness, and the response increases the restoring force of the system and reduces the amplitude of the response. At the same time, continuous bifurcation occurs, the phenomenon is caused by the waviness fault. To sum up, for the nonlinear stiffness system with waviness fault, as the increase of the mass eccentricity for the rotor, the motion stability of the system is reduced.

Bifurcation diagrams of rotor-bearing system when c0 = 5 μm, k1 = 3 × 1016 N/m3, Nz = 8,
Conclusion
The dynamic characteristics of the bearing-rotor system are investigated in this article. A new model of the rolling bearing with the waviness fault is developed, and the model is introduced in the systematic model of the bearing-rotor considering the cubic stiffness nonlinearity of the shaft material. The nonlinearity from the bearing and the nonlinearity from the stiffness of the shaft are taken into consideration in this article. It is of great significance to consider these two nonlinear factors for dynamic analysis. The research includes the effect of the bearing waviness parameters, the bearing clearance, and mass eccentricity on the dynamic characteristics of the linear and the nonlinear stiffness rotor systems. Based on the developed model, main conclusions are as follows:
The system with cubic nonlinear stiffness shows more complex bifurcation characteristic. Comparing with the linear stiffness system in the literature, 20 the bifurcation diagram has several spans of chaos instead of only one span of chaos, seen in Figure 21(a) and (b). This difference originates from the consideration of the cubic nonlinear stiffness for the system. The achievement is helpful to the control of the vibration.
The mass eccentricity of the system will reduce the stability of the nonlinear system more obviously, comparing with the linear stiffness system. For the rotor system with linear stiffness, the enlargement of rotor eccentricity will increase the critical speed and the response of the vibration; for the nonlinear stiffness rotor-bearing system with the waviness fault, the increase of the mass eccentricity for the system will strengthen the effect of the nonlinear stiffness on the system and reduce the stability of the system. Quantitative method of calculation is proposed in detail in this article, the method can be extend to similar dynamic analysis of the rotational machinery.
The waviness characteristics have an important impact on the dynamics of the bearing-rotor system. Comparing with only one nonlinear factor in other articles, the dynamic behaviors of the system with two nonlinear factors are more complex as the initial amplitude of waviness increases; the enlargement of the maximum amplitude for the waviness is mainly to increase the peak value of the response; to reduce the high-order vibration spectrum; and to enhance the wave characteristics of the axes track. Increase of the amplitude of the waviness essentially changes the energy distribution of the vibration process; the increase in the number of waviness will make the system motion more complicated and make the size order of the frequency components changed. The complexity is related to the multiple nonlinearity such as the cubic nonlinear stiffness, the internal clearance, the nonlinear contact force, and, especially, the waviness. In engineering practice, the increase of the waviness level leads to the amplification of the wear and noise. The study for the impact of the waviness on the vibration provides a calculation tool for control of the vibration and noise.
The expansion of bearing clearance will reduce the stability of the system and increase the response of vibration. For the rotor system with the waviness fault, the increase of the clearance for the rolling bearing will make the motion track more complicated, and the dominate component of frequency will gradually change from VC vibration frequency to the working frequency. The existence of bearing clearance strengthens the motion complexity of the rotor system with the nonlinear stiffness. This research is valuable for systematic design of the clearance from the perspective of the vibration reduction, and even vital to the safe and stable operation of the rotor system.

Footnotes
Appendix
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: The authors are grateful for the finance support provided by the National Natural Science Foundation of China under Grant number 51305267.
Data availability
All data generated or analyzed during this study are included in this article.