
Abstract
For the palletizing robot’s operating characteristics of high speed, high acceleration, and heavy load, it is necessary to make a research on the structure optimization focusing on the vibration characteristics according to the mechanical and dynamic performance analysis. This article first introduces the mechanical feature and working principle of high-speed and heavy-load robot palletizer. Kinematics analysis is carried out by using D-H parameter method, which obtains positive kinematics solution and workspace. Jacobian matrix is deduced, and the relationship between joint space and Cartesian space is established. Second, for the reason that joint flexibility has a great influence on the vibration performance of the robot, a rigid–flexible coupling dynamic model is established based on the simplified model of the flexible reducer and Lagrange’s second equation to describe the joint flexibility of high-speed and heavy-load palletizing robot, and the vibration modes of the robot are analyzed. The influence of different joint stiffness on the frequency response of the system reveals the inherent properties of the heavy-load palletizing robot, which provides a theoretical basis for the optimal design and control of the heavy-load palletizing robot.
Keywords
Introduction
With the wide application of high-speed and heavy-load palletizing robots in automobile, metallurgy, and logistics industries, automated production lines put forward higher requirements for the speed, load capacity, acceleration, and positioning accuracy of robots. The high-speed and heavy-load palletizing robot not only reduces the positioning accuracy of the palletizing robot but also limits the speed of the robot.1,2 In view of the high-speed, high-acceleration, and heavy-load working characteristics of high-speed and heavy-load palletizing robot, it is not enough to complete structural analysis only at the kinematics level. It is necessary to carry out dynamic analysis of the robot body.
Many achievements have been made in the study of flexible models. Bridges and Dawson 3 took into account the non-linear flexibility such as transmission friction, which made the flexible joint model more appropriate. On the basis of considering the non-linear links including backlash, Murphy et al. 4 established a complete flexible dynamic model of the robot by using Newton Euler method. For typical harmonic drive, Ghorbel and colleagues5,6 established the model of harmonic reducer and verified the influence of reducer flexibility on motion through theoretical and experimental analysis. Hong and colleagues7–9 used the basic principle of continuum mechanics to establish a rigid-flexible coupling dynamic equation, which has a high accuracy of coupling terms. Based on the principle of virtual displacement, Lu et al. 10 supplemented and improved Kinetic Elastic Dynamic equation when modeling, and included the coupling term between elastic deformation and nominal motion of rigid body, which effectively improved the accuracy of the model. 11 Zhang et al. 12 proposed a structural modeling and dynamic analysis method of palletizing robot considering joint flexibility, and analyzed the vibration modes of the robot. On the basis of considering the deformation of components, driving motor, and speed reducer, Lou et al. 13 analyzed the static stiffness of the end of the whole machine, and established the static stiffness model of the end of the whole machine by means of linear superposition principle.
In the past, the dynamic modeling and analysis of the palletizing robot only stayed at the level of kinematics of the robot, and did not analyze the key factor of the dynamic characteristics of the robot. Aiming at the above problems, starting from the working characteristics of high-speed and heavy-load palletizing robot, a structural modeling and dynamic characteristics analysis method of high-speed and heavy-load palletizing robot considering joint flexibility is proposed, and the effects of different joint stiffness on the frequency response characteristics of the system are studied.
Through the study of this article, the inherent properties of the system are revealed, and the established kinematic and dynamic models lay a theoretical foundation for the trajectory planning and control system design in the future. In practical aspects, the conclusions of this article can be used to guide the determination of reasonable working range and structural optimization design of palletizing robot—for example, adding a balance block with appropriate mass size, which can help to improve the seismic performance and increase the working range of the system.
Structural design of heavy-load palletizing robot
The design load of the high-speed and heavy-load four-degree-of-freedom palletizing robot is 300 kg, which consists of four rotary joints:
The base is connected with the main frame through a rotating joint whose axis is perpendicular to the ground.
The main frame is mounted on the base by rotating joints to support the whole arm, on which there are big arm, small arm, and connecting bar to keep the wrist level. The parallel quadrilateral mechanism is composed of big arm, small arm, and connecting bar. This mechanism not only has the function of travel enlargement but also increases the stiffness of the whole arm. The selection of parameters of each link and the relative position of its installation will directly affect the position and posture of the robot in the workspace.
The motor and speed reduction mechanism of the third joint adopts a rear parallelogram mechanism, which can place the motor and speed reduction mechanism of the first three joints on the base and main framework, which will obviously improve the dynamic characteristics of the system and reduce the inertia of the system.
The wrist is connected with the arm through a rotating joint, and the end joint is connected by the superposition effect of parallel quadrilateral mechanism in series, which satisfies the wrist’s controllability, ensures that the rotation axis of the wrist joint is always perpendicular to the ground, and reduces the control difficulty and shortens the handling period. The wrist is a flange, which can be used according to the stacking items. Similarly, different forms of actuators are connected to the flanged disk. The ontology of the robot is shown in Figure 1.

Ontological structure of high-speed and heavy-load palletizing robot.
Modeling of rigid–flexible coupling dynamics
Kinematic analysis
First, the D-H coordinate system of the high-speed and heavy-load four-degree-of-freedom palletizing robot is established. The coordinate system of the connecting bar is set as shown in Figure 2.

Connecting-bar coordinate system of high-speed and heavy-load palletizing robot.
According to the parameters of the connecting bar, the transformation matrices can be obtained





The positive kinematics solution of the end effector can be obtained by matrix transformation

The Jacobian matrix of palletizing robot is a function of structural parameters and joint variables

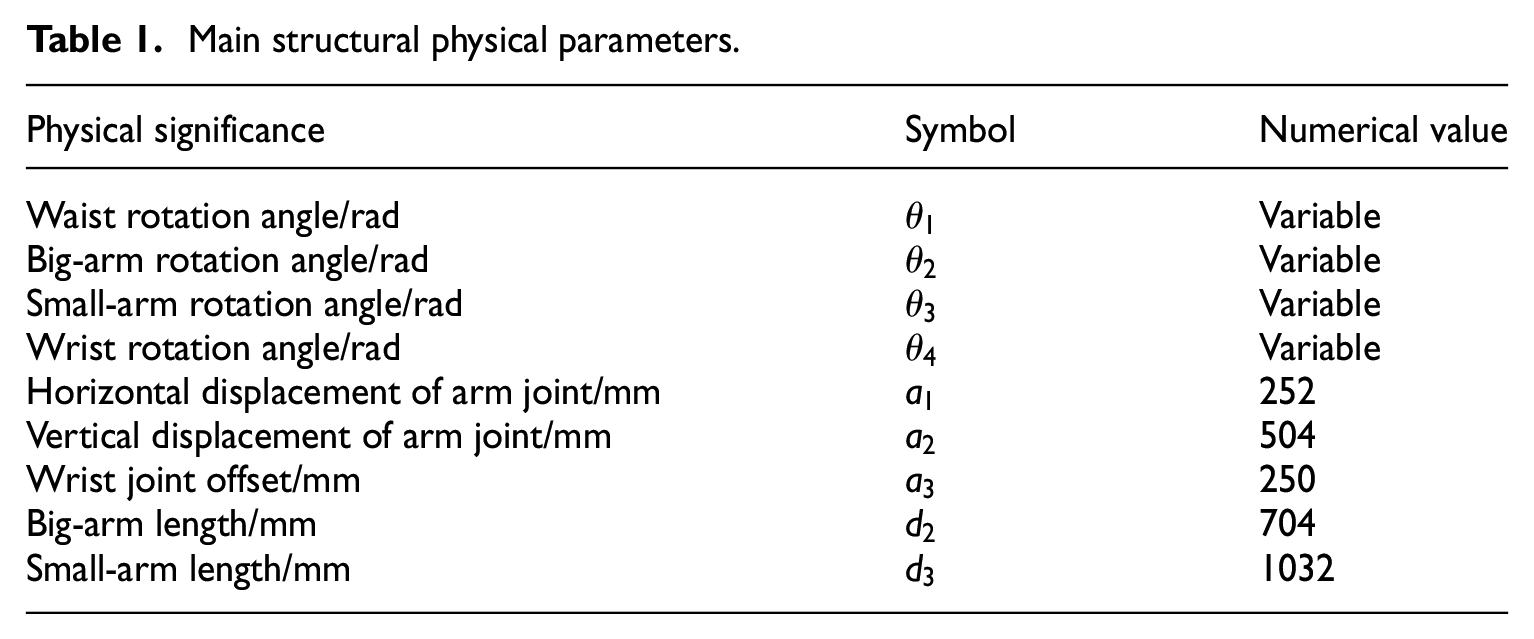
The definition and numerical value of the main structural physical parameters of the high-speed and heavy-load palletizing robot are shown in Table 1.
Main structural physical parameters.
Dynamics equation of heavy-load palletizing robot system
The second kind of Lagrange equation is used to model the high-speed and heavy-load palletizing robot system as shown in Figure 2. First, the kinetic energy of the moving parts of the system is obtained








where
The potential energy of the system includes gravitational potential energy and elastic potential energy, in which gravitational potential energy is

Assuming that the deformation is concentrated at the end of the bar, the elastic potential energy of the system is

where
Definition of pull equation:

Definition of generalized coordinates


The Lagrange equation of equation (18) is written in matrix form

where M is the mass matrix and K is the stiffness matrix.
The expression of equation (21) in the state–variable space is

where X is the state parameter, U is the input variable, Y is the output variable, and A, B, and C are the state matrix, input matrix, and output matrix of the system respectively. Each expression is
Simulation analysis
Static stiffness analysis of palletizing robot
Structural stiffness of bars
For the heavy-load palletizing robot, the load is very large, and the bar cannot be processed according to the rigid body like the light-load robot. The influence of the static stiffness of the bar on the end deformation must be considered. Because the stiffness of the waist and the end effector are very large and the contribution to the end displacement is very small, only the bars in the robot need to be considered.
First, the force of each bar in the whole heavy-load palletizing robot is analyzed. The main bars are two and three pairs. The force acting on a member can be divided into its own gravity and the internal force generated by the end load, as shown in Figure 3. Both gravity and internal force can be equivalent to the component forces along the axial and radial directions. For internal forces, d5, d7, d9, and d11 are only subjected to axial forces, while d1, d2, d6, and d8 are subjected to non-axial forces. At the same time, d1 and d2 are subjected to the bending moment produced by the motor. So d1, d2, d6, and d8 can be used as cantilever beam to calculate its deformation; d5, d7, d9, and d11 can calculate deformations according to simply supported beam, and d3 can calculate the deformation according to outrigger beam.
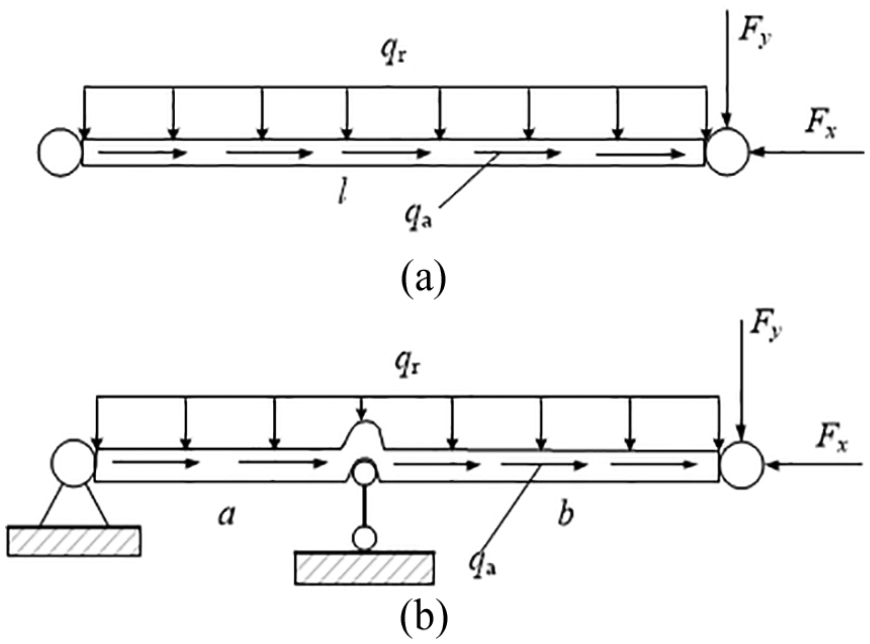
Force diagram of bar. (a) Force analysis diagram of bar d5, d7, d9, d11. (b) Force analysis diagram of bar d3.
Next, taking bar d1 as an example to calculate static stiffness.
As shown in Figure 4, the axial component of gravity and internal force causes tension and compression deformation, while the radial component causes bending deformation. Table 2 shows the formulas of axial and radial deformations of bar d1 caused by internal forces and gravity.
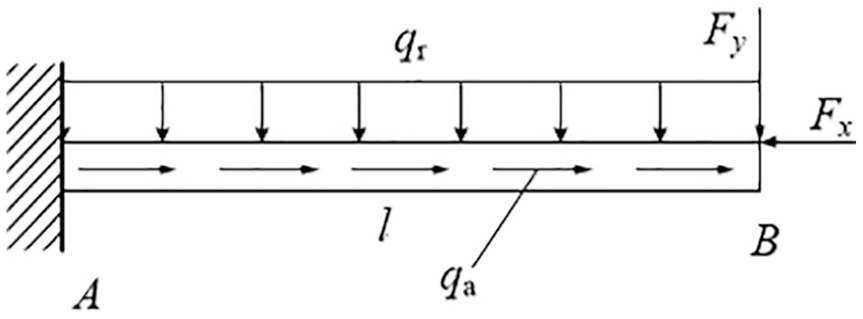
Force analysis diagram of bar d1.
Formulas of axial and radial deformation of bars produced by internal force and gravity.

Here, l is the length of the bar;

According to the above method, the static stiffness of each member of the palletizing robot can be obtained under the maximum load condition (the end load is 300 kg). Then, each member of the robot can be regarded as an elastic system composed of multi-stage linear springs in series and in parallel.14,15 The equivalent static stiffness can be obtained by integrating its stiffness into the upper arm and the lower arm of the active member.
Torsional stiffness of motor
For the study of static stiffness of motor, AC servo motor can be regarded as a mechanical torsional vibration system.
16
When the natural frequency of the system is

where t is the mechanical time constant of the motor (s), J is the moment of inertia of motor rotor (N·m/s2), and Kd is the torsional stiffness of motor system (N·m/rad).
Torsional stiffness of RV reducer
For RV reducer, if the input shaft (input gear) is fixed and the torque is applied on the output shaft, the torsion corresponding to the torque will occur, thus the hysteresis curve can be drawn and the static stiffness can be calculated through the hysteresis curve. Specific methods are as follows: when the system eliminates the gap in a certain direction, the input shaft is fixed, the load on the output shaft is increased from zero to rated torque step by step, and the torsion angle corresponding to each stage of loading is measured at the end of the output shaft. The torsional stiffness of RV reducer is the incremental ratio of the load torque on the output shaft to the corresponding torsional angle: b/a; the corresponding relationship is shown in Figure 5.
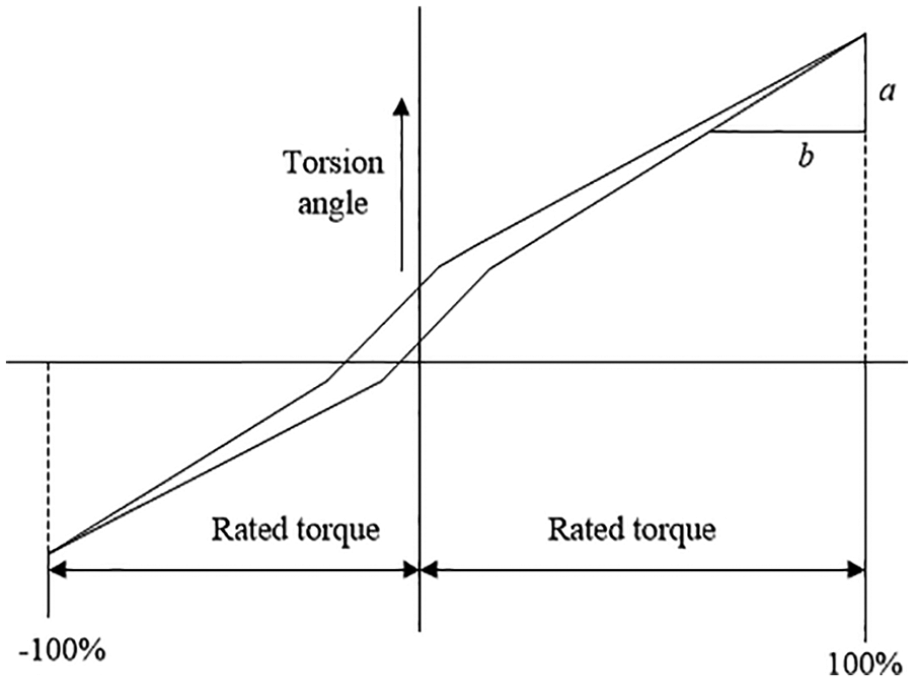
Hysteresis curve of RV reducer.
According to the principle of linear superposition, the end deformation Δx of each pair of joint-connecting bars can be decomposed into the end-deformation Δx motor, Δx reducer, and elastic deformation Δx component caused by the torsion of servo motor, RV reducer, that is, Δx = Δx motor +Δx reducer +Δx component.
From the previous calculation of the static stiffness of motor and reducer, it can be seen that the static stiffnesses of motor and reducer are very large relative to the torque bars, and the deformation can be neglected. Therefore, the contribution of component deformation to the static stiffness of the end is not considered. Because the waist and the end actuator are irregular objects, the stiffness is very large, and the deformation can be neglected. In the end, the palletizing robot can be simplified to a two-bar tandem mechanism. The big arm and the small arm can be regarded as a special rigid body.
The expression of the mass matrix obtained by calculation is as follows
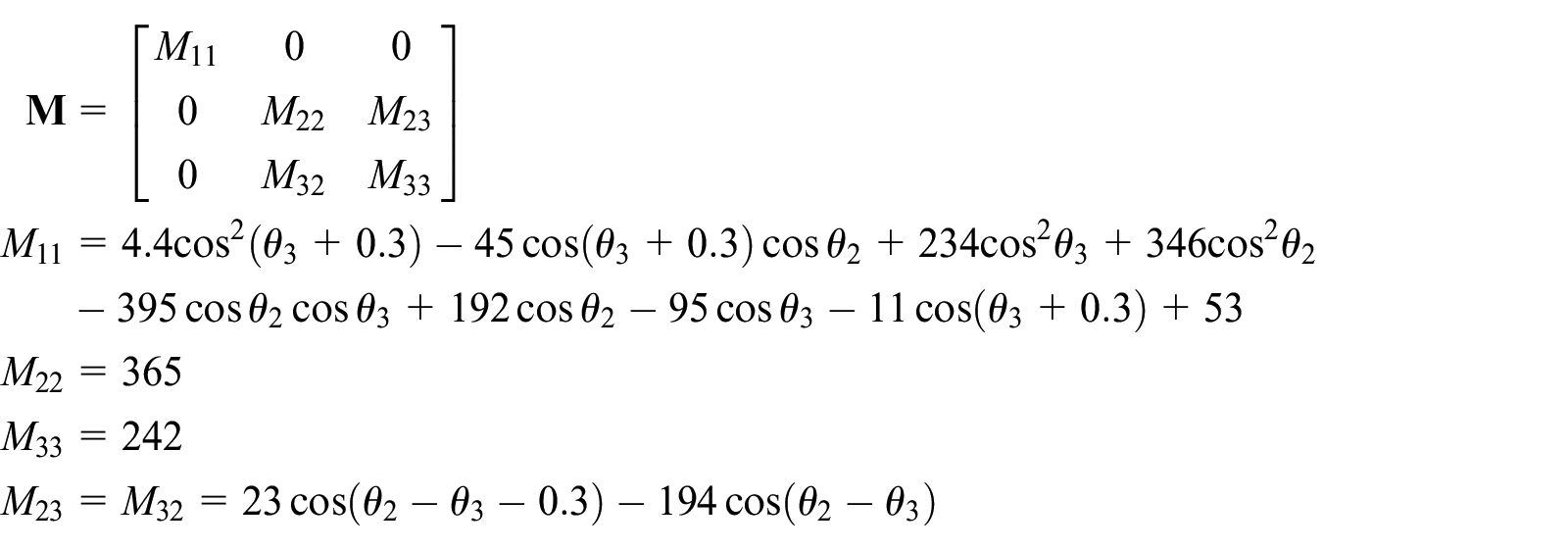
The stiffness matrix is expressed as follows

The diagonal stiffness of the stiffness matrix is equivalent to the stiffness of the first three joints.
Space analysis of terminal motion of palletizing robot
Jacobian matrix reflects the mapping relationship between Cartesian space coordinates at the end of the robot and joint space coordinates. In addition, the bi-parallelogram structure of the robot results in interference during operation. According to the structural characteristics and geometric relationship of the robot, the joint angle limits that the robot should not exceed are as follows

According to the structure characteristics of high-speed and heavy-load robot, the displacement of the end on the horizontal and vertical planes is plotted by MATLAB, as shown in Figure 6.
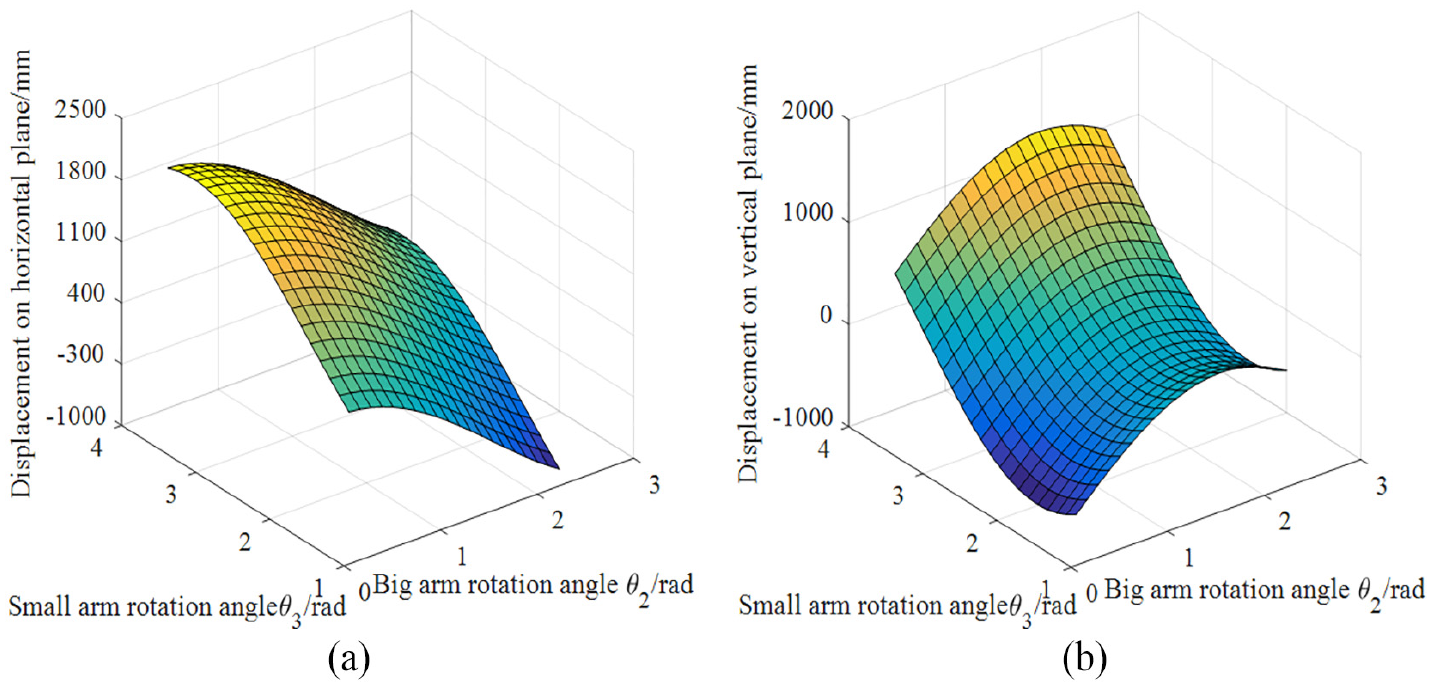
Displacement of terminal of palletizing robot on (a) horizontal plane and (b) vertical plane.
Frequency response analysis of palletizing robot
Compared with the natural frequency of undamped system, the existence of damping will reduce the natural frequency, but the relative degree is small, and the specific value of damping is difficult to obtain accurately. 17 In this article, the natural frequencies of the high-speed and heavy-load palletizing robot system are calculated, and the influence of damping on the natural frequencies is neglected while the accuracy is guaranteed. At the same time, according to the theory of non-linear vibration, the constant damping or non-linear damping can be neglected when calculating the natural frequencies, because the damping has little influence on the vibration law.18,19
According to the above analysis, the natural frequencies of free vibration can be obtained. The vibration equation can be written in the form of equation (21), and the natural frequencies can be obtained from the following equation

Defining

The inertia matrix of the robot is related to the joint rotation angle; that is, the natural frequency of the robot is related to its attitude, and the natural frequency of the low-order vibration is determined by the structural parameters.
20
At the same time, it is also affected by the joint rotation angle
The relationship between the first three vibration frequencies and the rotation angle of the high-speed and heavy-load palletizing robot with or without bars’ elastic deformation effect are shown in Figures 7–9.
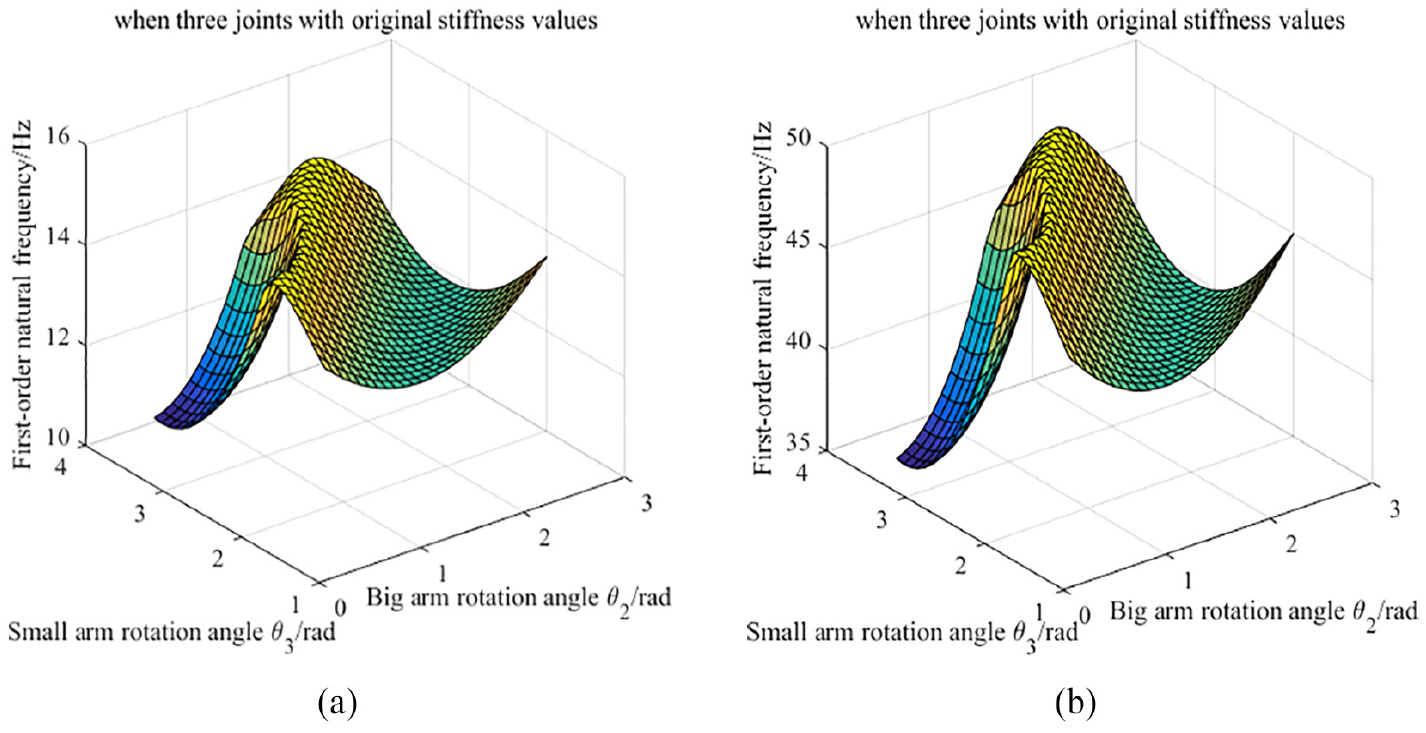
Spatial distribution of first-order natural frequency of palletizing robot: (a) with bars’ elastic deformation effect and (b) without bars’ elastic deformation effect.

Spatial distribution of second-order natural frequency of palletizing robot: (a) with bars’ elastic deformation effect and (b) without bars’ elastic deformation effect.

Spatial distribution of third-order natural frequency of palletizing robot: (a) with bars’ elastic deformation effect and (b) without bars’ elastic deformation effect.
From Figures 7(a), 8(a), and 9(a), it can be seen that the first three natural frequencies range of the high-speed and heavy-load palletizing robot with bars’ elastic deformation effect are 11.17–15.28 Hz, 13.24–26.59 Hz, and 18.78–83.71 Hz, respectively.
From Figures 7(b), 8(b), and 9(b), it can be seen that the first three natural frequencies range of the high-speed and heavy-load palletizing robot without bars’ elastic deformation effect are 36.16–49.80 Hz, 43.16–86.67 Hz, and 61.22–270.96 Hz, respectively.
It can be found from the comparative study with or without bars’ elastic deformation effect that considering the elastic deformation of the bars, the first three natural frequencies of the palletizing robot decrease, and the seismic performance of the system also decreases, which more accurately reflects the dynamic characteristics of the heavy-load and high-speed palletizing robot. Therefore, the following studies are all aimed at the case of considering the bars’ elastic deformation.
Effect of joint stiffness on frequency response characteristics of palletizing robot
The influence of the first three joint stiffness changes on the natural frequency of the high-speed and heavy-load palletizing robot is studied, which serves as the theoretical basis for the structural optimization of the robot.
The influence of the first joint stiffness (i.e. lumbar joint) on the first-order natural frequency
Figure 10 shows the effect of the first joint stiffness on the first natural frequency when it is increased by 2, 5, and 10 times respectively. When the stiffness of the first joint increases by 2, 5, and 10 times respectively, the ranges of first-order natural frequency is as follows: 13.24–15.28 Hz. It can be seen from Figure 10 that increasing the stiffness of the first joint can slightly increase the natural frequency of the system, but the effect of increasing the stiffness of the first joint is very small, so the natural frequency of the system cannot be increased by only increasing the stiffness of the first joint.

The influence of the first joint stiffness increases on the first-order natural frequency: when (a) three joints with original stiffness values, (b) only the first joint stiffness increases 2 times, (c) only the first joint stiffness increases 5 times, and (d) only the first joint stiffness increases 10 times.
Figure 11 shows the effect of the first joint stiffness on the first natural frequency when it is reduced by 2, 5, and 10 times respectively. When the first joint stiffness is reduced by 2, 5, and 10 times respectively, the ranges of first-order natural frequency are as follows: 7.89–15.28 Hz, 4.99–14.51 Hz, and 3.53–13.98 Hz; as can be seen from Figure 11, the natural frequency of the system decreases significantly when the stiffness of the first joint decreases. Therefore, to ensure the seismic performance of the palletizing robot, sufficient stiffness of the first joint is needed and serves as an important basis for optimal design.

The influence of the first joint stiffness decreases on the first-order natural frequency: when (a) three joints with original stiffness values, (b) only the first joint stiffness decreases 2 times, (c) only the first joint stiffness decreases 5 times, and (d) only the first joint stiffness decreases 10 times.
The influence of the second joint stiffness (i.e. the big arm joint) on the first-order natural frequency
Figure 12 shows the effect of the second joint stiffness on the first natural frequency when it is increased by 2, 5, and 10 times respectively. When the stiffness of the second joint increases by 2, 5, and 10 times respectively, the range of first-order natural frequencies is as follows: 11.17–18.77 Hz; it can be seen from Figure 12 that increasing the stiffness of the second joint alone cannot significantly improve the first-order natural frequency, but if the stiffness of the second joint is increased at the same time, the seismic performance of the system can be improved by ensuring that the palletizing robot works in a wide range of arm rotation angles.

The influence of the second joint stiffness increases on the first-order natural frequency: when (a) three joints with original stiffness values, (b) only the second joint stiffness increases 2 times, (c) only the second joint stiffness increases 5 times, and (d) only the second joint stiffness increases 10 times.
Figure 13 shows the effect of the second joint stiffness on the first natural frequency when it is reduced by 2, 5, and 10 times respectively. When the stiffness of the second joint is reduced by 2, 5, and 10 times respectively, the range of first-order natural frequencies is as follows: 10.13–10.81 Hz, 6.67–6.83 Hz, 4.78–4.83 Hz; as can be seen from Figure 13, the natural frequency of the palletizing robot is greatly reduced when the stiffness of the second joint is reduced, and the seismic performance of the system is greatly reduced.

The influence of the second joint stiffness decreases on the first-order natural frequency: when (a) three joints with original stiffness values, (b) only the second joint stiffness decreases 2 times, (c) only the second joint stiffness decreases 5 times, and (d) only the second joint stiffness decreases 10 times.
The influence of the third joint stiffness (i.e. the small arm joint) on the first-order natural frequency
Figure 14 shows the effect of the third joint stiffness on the first natural frequency when it is increased by 2, 5, and 10 times respectively. When the stiffness of the third joint is increased by 2, 5, and 10 times respectively, the range of first-order natural frequencies is as follows:11.17–15.28 Hz; it can be seen from Figure 14 that the seismic performance of the system can be significantly improved if the third joint stiffness is increased while the palletizing robot works in a larger arm rotation angle or a smaller arm rotation angle range.

The influence of the third joint stiffness increases on the first-order natural frequency: when (a) three joints with original stiffness values, (b) only the third joint stiffness increases 2 times, (c) only the third joint stiffness increases 5 times, and (d) only the third joint stiffness increases 10 times.
Figure 15 shows the effect of the third joint stiffness on the first natural frequency when it is reduced by 2, 5, and 10 times respectively. When the stiffness of the third joint is reduced by 2, 5, and 10 times respectively, the variation ranges of the first natural frequency are as follows: 11.17–13.26 Hz, 7.92–8.39 Hz, and 5.78–5.93 Hz; as can be seen from Figure 15, the natural frequency of the palletizing robot is also greatly reduced when the stiffness of the third joint is reduced, which greatly reduces the seismic performance of the system.
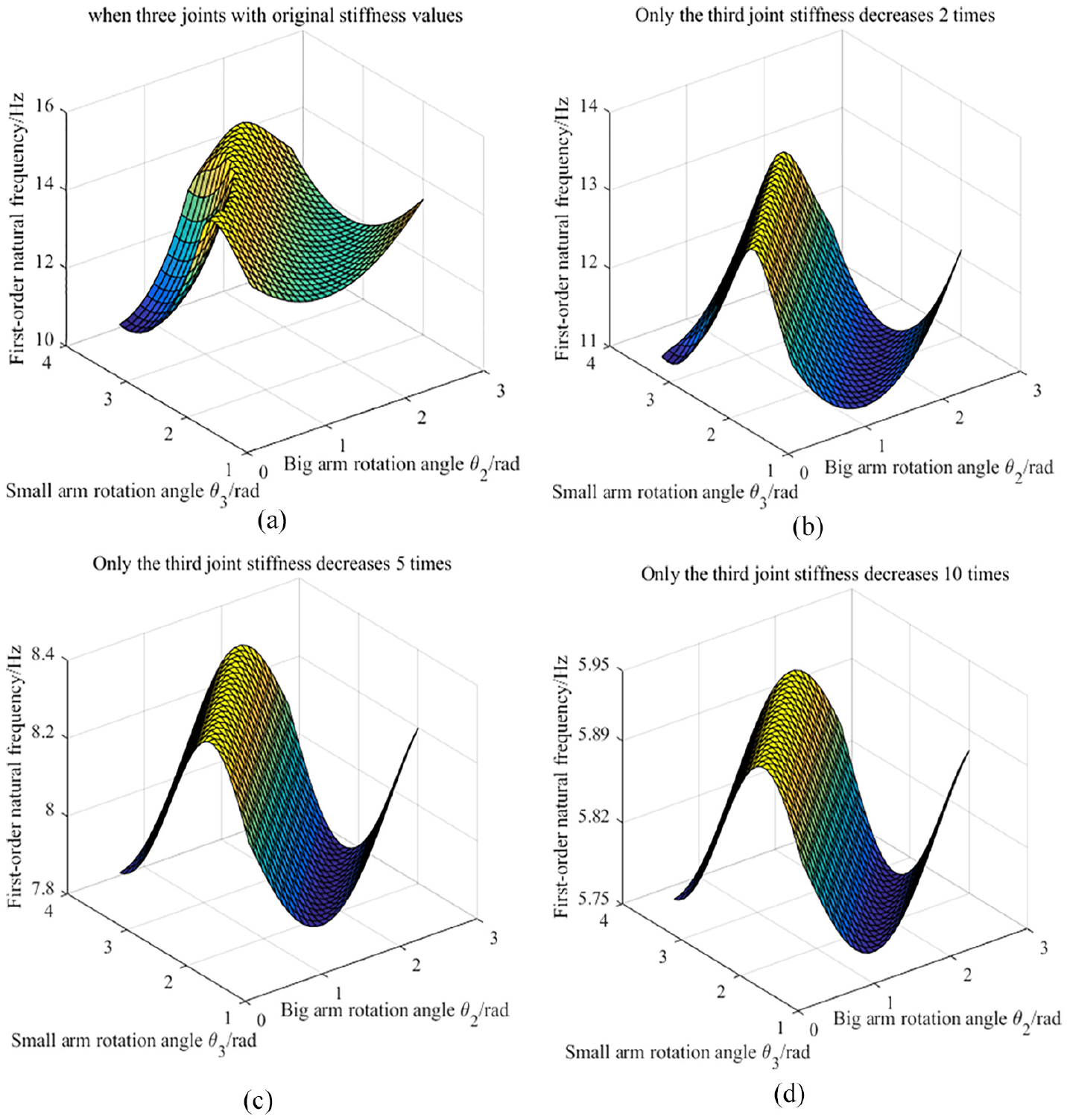
The influence of the third joint stiffness decreases on the first-order natural frequency: when (a) three joints with original stiffness values, (b) only the third joint stiffness decreases 2 times, (c) only the third joint stiffness decreases 5 times, and (d) only the third joint stiffness decreases 10 times.
In summary, in order to make the system have enough natural frequencies to improve the seismic performance of the system, first of all, it is necessary to ensure that the stiffness of the first joint (i.e. lumbar joint) is large enough, and the stiffness of the second and third joints (i.e. the big arm joint and the small arm joint) are moderately increased, while ensuring that the heavy-load palletizing robot operates in a larger rotation angle in the big arm or a lower rotation angle in small arm joint simultaneously.
Conclusion
First, based on the geometric characteristics of the bi-parallelogram structure of the high-speed and heavy-load palletizing robot, the kinematics equation of the robot are established by the geometric method, and the Jacobian matrix is deduced. The relationship between the displacement and velocity of the joint space and Cartesian space is established. The workspaces of the palletizing robot are plotted by MATLAB to present the end displacement on the horizontal and vertical planes.
Then, considering the working characteristics of high speed, high acceleration, and heavy load of the palletizing robot, a structural modeling and dynamic characteristics analysis of the high-speed and heavy-load palletizing robot considering joint flexibility is proposed, and a more accurate rigid body dynamic equation of the palletizing robot is established by using the second kind of Lagrange equation.
Finally, the influence of different joint stiffness on the frequency response characteristics of the system is analyzed. To improve the seismic performance of the system, it is necessary to ensure that the stiffness of the first joint is large enough, and the stiffness of the second and third joints is moderately increased. Following these analysis and improvement, the palletizing robot can work in the range of larger in big arm rotation angle or lower in small arm rotation angle.
The motivation of this article is to reveal the inherent properties of the high-speed and heavy-load palletizing robot through the analysis of dynamic characteristics, and to provide theoretical basis for structural optimization design. Based on the above theoretical research, a balance block with moderate mass and size can be added to the structure design of palletizing robot to increase its working range and improve the seismic performance of the system. At the same time, the establishment of kinematics and dynamics model lay a foundation for the follow-up trajectory planning and control system design.
Footnotes
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This study is supported by the Natural Science Foundation of Shandong Province, China (Grant No. ZR2019PEE006), Special Fund Plan for Local Science and Technology Development led by Central Authority in China, and the Shandong Province Higher Institution Science and Technology Plan Project (Grant No. J17KA028).