
Abstract
This study aims to present a new concept of a knee hinge based on a crossed four-bar linkage mechanism which has been designed to optimally follow a motion curve representing the knee kinematics in the position at which the knee hinge should be placed. The methodology used to determine the optimal knee hinge is based on the optimization of certain variables of the crossed four-bar mechanism using genetic algorithms in order to follow a certain motion curve, which was determined using a biomechanical model of the knee motion. Two current, commercially available knee hinges have been used to theoretically determine their motion by means of the path performed by their instantaneous helical axis. Comparison between these two different knee hinges, Optimal Knee Hinge and the theoretical motion performed by a human knee reveals that a common monocentric hinge has a maximum misalignment of up to 27.2 mm; a polycentric hinge has a maximum misalignment of 23.9 mm. In contrast, the maximum misalignment produced by the Optimal Knee Hinge is 1.99 mm. The orthotic joint presented significantly improves the kinematical compatibility and the adjustment between orthotic and human joint motion, and should provide several advantages in terms of comfort and safety. Furthermore, the determination of the instantaneous helical axis for a particular user, by means of human movement measurement techniques, will enable the optimal crossed four-bar mechanisms to be determined in a customized and personalized manner. As a consequence, this new concept of orthotic knee joint design may improve the adaptability of lower limb orthoses for the user, and may lead to significant advantages in the field of orthotics for the lower limb.
Introduction
Recent advances in electronics and control engineering have been introduced into the medical field over the last few years. In particular, research in orthotics has led to several improvements in electronic control of orthotic joint movements.
Some authors estimate that at least a dozen stance control orthoses (SCOs) have appeared on the market in the course of the last 30 years and all of them have disappeared for various reasons such as unreliability and mechanical inconsistency (Michael et al. 2003). The rationale for this stems from the low kinematical compatibility between orthotic and physiological knee motion, the mismatch between the orthotic and natural knee joint motions can cause an unwanted constraint force with subsequent pistonning of the orthotic components over the lower limb, producing restriction of normal range of motion, distal migrations and misalignment of the orthosis and skin pressure discomfort (Lewis et al. 1984a). Therefore, ensuring a satisfactory alignment between the centre of rotation of the orthosis and the user knee is a potential solution to providing comfort and for enhancing the satisfactory use of any orthotic device.
A further important consideration is that the use of hinges which are kinematically incompatible with the human joint to which they are applied, could seriously damage internal tissues and would not provide the expected results in a rehabilitation programme. Several tests and studies have been published with the purpose of evaluating different models of orthotic knee joints (William et al. 1982). Although many users of orthoses have reported subjective improvements in function, multiple studies on knee bracing have not demonstrated improved knee stability or faster recovery times (Mallory et al. 2003). In a more recent prospective study involving 62 patients (Moller et al. 2001), in which functional bracing was compared with no bracing in rehabilitation after anterior cruciate ligament reconstruction, researchers found no benefit from using a post-operative knee orthosis at any stage (2 and 6 weeks; 3, 6, and 24 months) after surgery. Moreover, the orthosis did not contribute to the attainment of a more stable knee during rehabilitation over a 2-year follow-up period. Other researchers investigated whether the kinematics of modern knee orthoses reflect the natural movement of the knee. The results of this study show that none of the knee orthoses tested provided efficient protection for knee movement (Thomsen et al. 2002).
These research results suggest that current commercially available orthotic knee joints do not move in a true physiological manner and, as such, do not properly reflect the human knee motion. Moreover, the articular movement is not exactly identical for all the individuals. For this reason, it would be desirable to be able to design orthotic joints which were not just compatible with human knee movement in general, but were also compatible with the particular movement of the individual user of the orthosis.
In conclusion, there is a need to improve the current concept of the orthotic knee joint in order to develop hinges which are more compatible with human knee kinematics. Therefore, the aim of this paper is to present a new concept of the external knee joint, based on a crossed four-bar linkage. In addition, a new design methodology based on the determination of the optimal mechanism which offers a better reproduction of the microstructure motion of the knee is proposed. This methodology will facilitate the design of customized knee hinges by simply adapting certain variables, upon which the kinematics of the mechanism depends, such as the bar lengths or the spatial location of the bar links.
Methods
Biomechanical knee models
The first step in the development of an orthotic knee joint compatible with the human knee motion is to perfectly understand and numerically quantify the microstructure of this special joint motion, which, historically speaking has been a difficult task. Furthermore, each individual has a different knee motion pattern depending on certain anthropometrical characteristics such as body mass, height, gender, muscular tone, etc. Several studies have tried to provide mathematical models of the human knee motion. The common problem faced by such models is that the human knee does not behave as a monocentric joint.
In this study, the model presented by Walker et al. (1985) has been used to determine knee movement, due to the fact that this model allows the displacement of the instantaneous helical axis (IHA) in three-dimensions which is essential to determine the motion performed by the intersection of the IHA and the plane in which the hinge will be located. Based on this model it is feasible to obtain the expression which determines the “average knee motion” of flexion-extension under quadriceps action. The relative motion between the femur and the tibia was determined when considering the medial and lateral femoral condyles as spherical surfaces. Given the latter, the centres of the spheres could be used as reference points. Figure 1 shows the radius and locations of condyle spheres and the direction of the axes considered in the model.
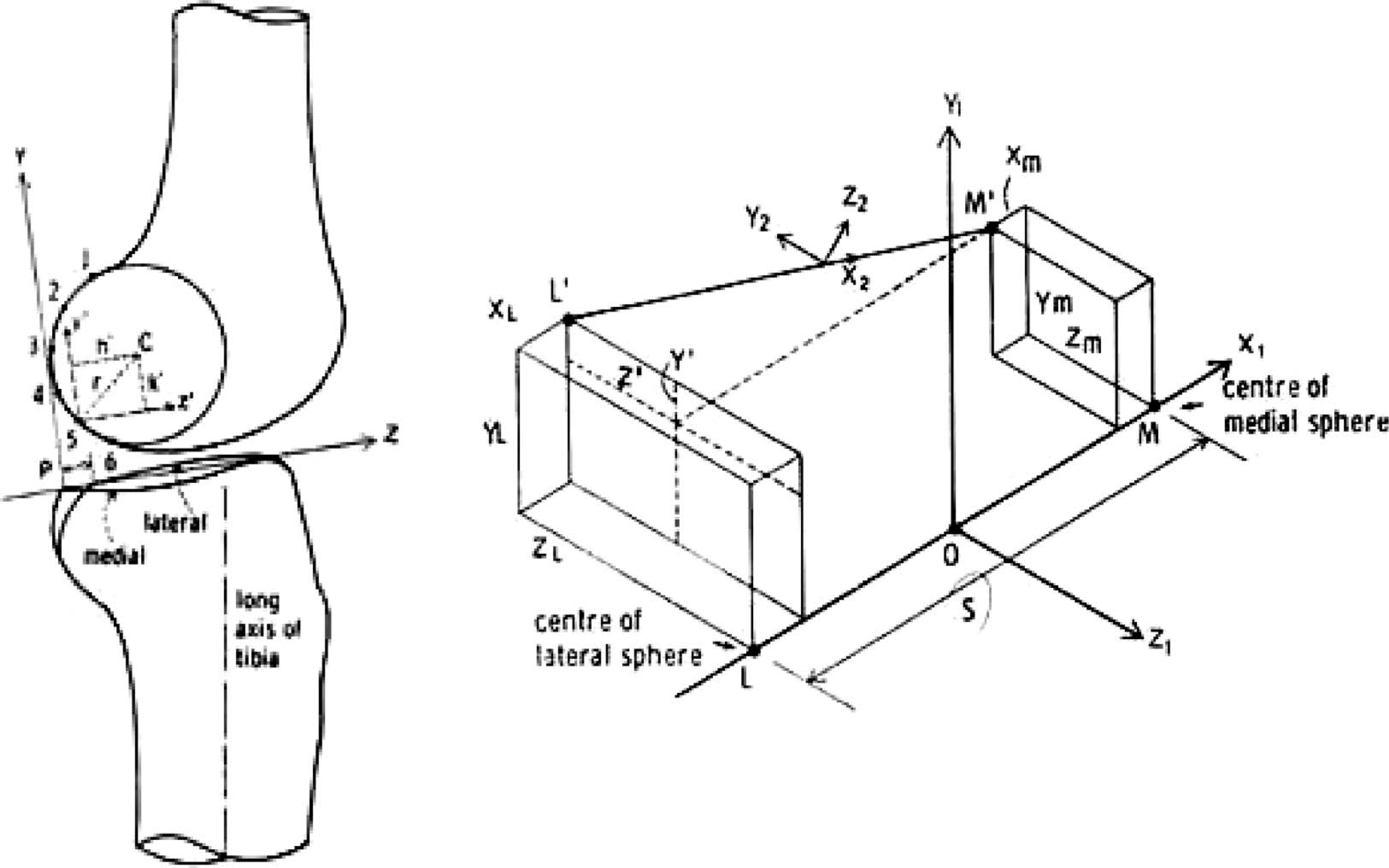
Condyle radius (left); Lateral and medial sphere centres (right).
Following the motion study carried out by Walker et al. (1985) it is possible to establish the following parameters: Varus rotation (V), internal rotation (R), anterior-posterior translation (ZDIS), and distal-proximal translation (YDIS) as a function of flexion angle (F):
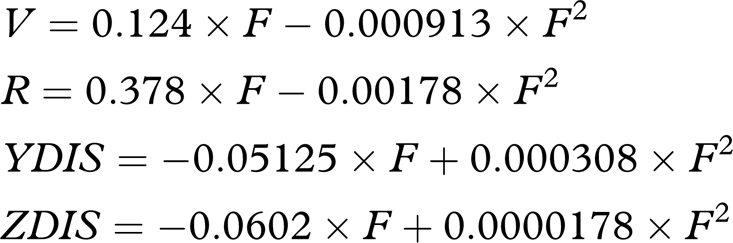
Angles are expressed in degrees and displacements in millimetres. These equations were then used to define the linear motion of the femoral axis relative to the tibia on the sagittal plane (YZ) at the medial distance value (X) where the external linkage would be placed (e.g., 60 mm from the intracondylar centre origin). At any given flexion at angle F, the transformation matrix is used to obtain the new Y and Z coordinates of the point on the femoral axis.
The motion given by the previous equation was assumed to be the IHA of the knee joint. The instantaneous helical axis is a useful tool for the comparative analysis of the relative motion of rigid objects, especially human joint motion. If an orthotic hinge based on a mechanism with an IHA equal to that of the natural movement of two body segments is obtained, the orthosis will then perfectly adapt to the physiological movement.
As can be seen in Figure 2, the representation of the IHA, established using the Walker et al. (1985) model, in a complete flexion-extension of the knee, performs some sort of mesh. Different sections, at different distances, of this mesh will describe different curves representing the same movement described by the knee.
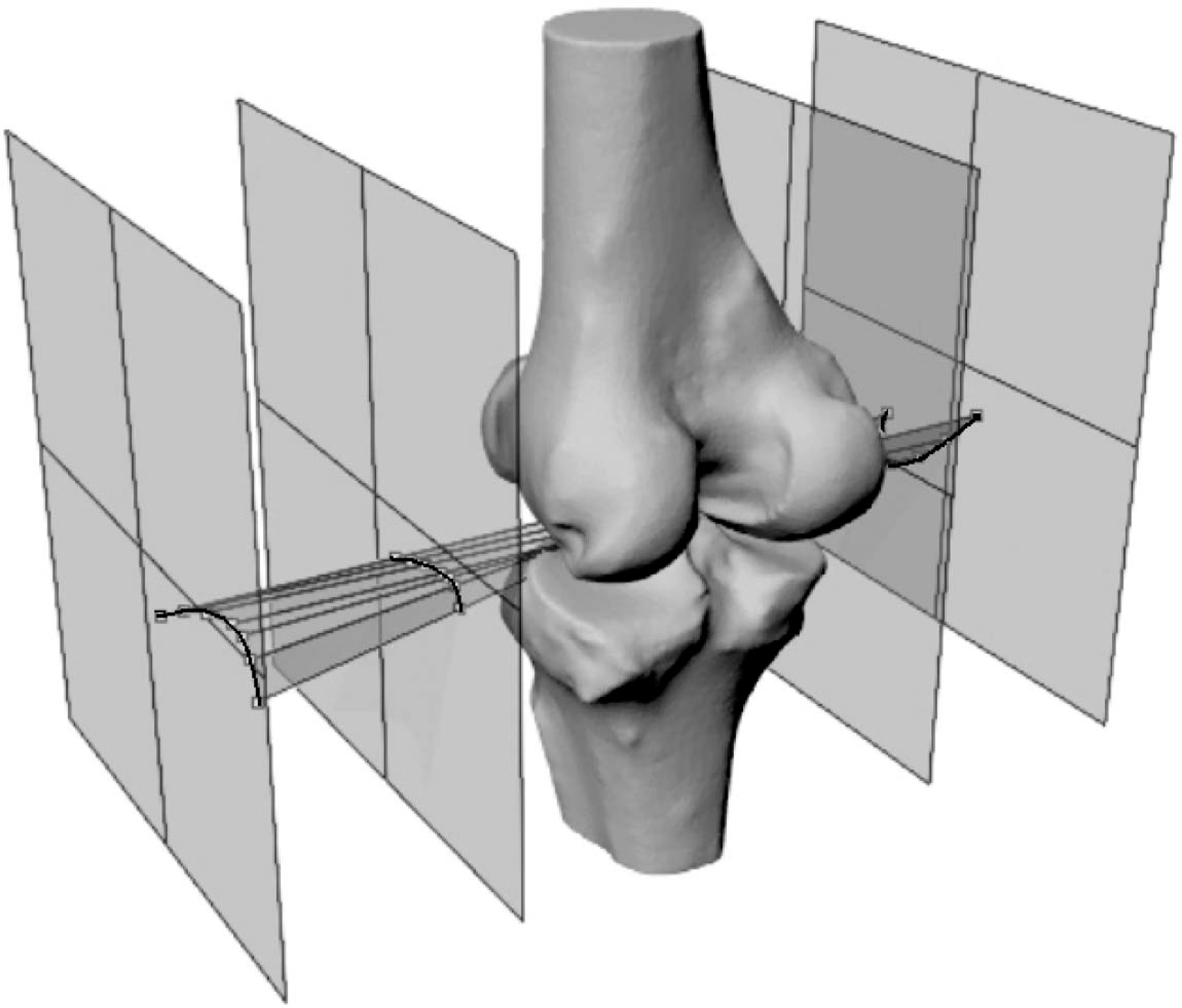
Representation of the 3-dimensional movement (IHA) in a complete flexion-extension of the knee joint.
Based on this, the design principle of any orthotic knee should focus on the premise that the external joint ought to describe the same motion as the curve performed by a section of the mesh at the same distance and with the same orientation as the orthotic hinge in real use conditions.
Using the Walker et al. (1985) expression it is possible to obtain the motion curve at any distance, simply by calculating the section between the mesh performed by the IHA, in the complete range of flexion, and the desired vertical plane. To develop the present work the authors have assumed a knee hinge placed at 60 mm from the middle of the knee, on the lateral side and with a vertical orientation.
Mobility analysis of a four-bar linkage mechanism
To obtain the desired motion curve, a mechanism was selected based on a crossed four-bar linkage. Although, it is possible to obtain similar solutions using other technical approaches such as a guide or a levy, these mechanical solutions include certain problems in terms of high cost manufacturability, resistance and pinching effect between the parts that perform the levy. The crossed four-bar mechanism has some advantages due to its simplicity, robustness and ease of design. However, the most important property of this mechanism is that it can be perfectly defined in an analytical way, due to the fact that its movement and kinematics are determined by the relative joint rotation angles.
The information of the displacement analysis of the four-bar linkage can be expressed in a mathematical closed form depending on the length and location of the four bars performing the mechanism. Moreover, another important feature of this mechanism is that the point where the links cross is the instantaneous centre of joint rotation. Subsequently it is possible, at least theoretically, to determine as accurately as possible, the optimal mechanism that follows a particular path. This approach is valid even for custom-built orthotic joints.
As can be seen in Figure 3, a four-bar linkage mechanism is characterized by the following parameters: X1, Y1: Which represent the spatial position of the crossed four-bar mechanism; L1, L2, L3, L4: Which represent the length of each one of the bars; α: Represents the angular rotation of the movement of the crossed four-bar linkage;

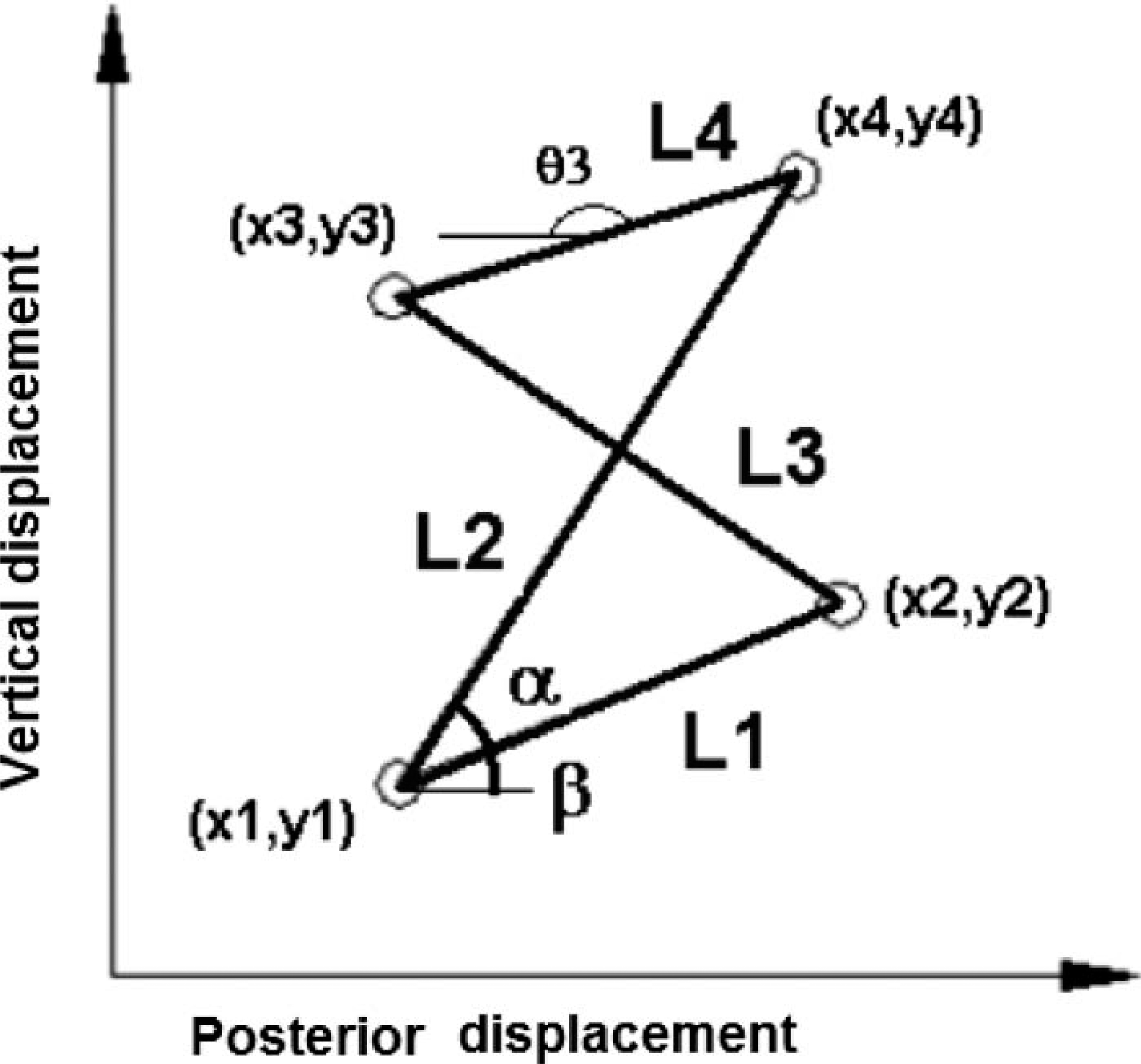
Principal parameters which describe the motion of a four-bar linkage mechanism.
This set of parameters completely characterizes the four-bar linkage mechanism and can be used to represent it. L4 is called the coupler-link and this movement should be totally compatible with the knee flexion.
Given that the link proportions are known and using the Freudenstein's equation (Suh & Radcliffe 1980) it is possible to perform a displacement analysis. Freudenstein's equation characterizes the movement of the crossed four-bar linkage mechanism and provides the output angle of the coupler link at any degree of flexion, which is given by the output angle θ3:

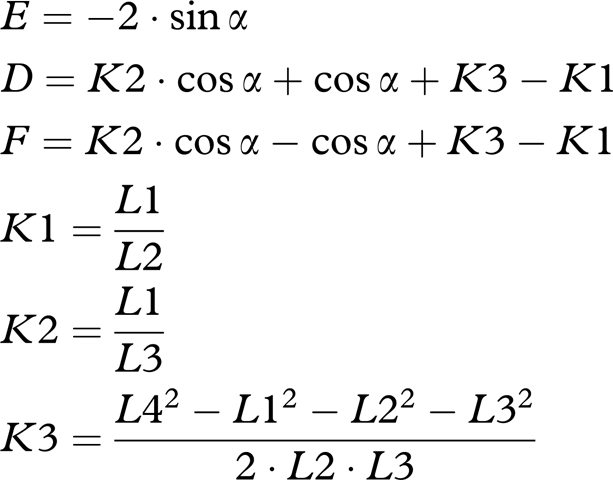
Knowing the output angle θ3 and the lengths of the bars, it is possible to determine position of the IHA of the crossed four-bar linkage.
Genetic algorithms methodology
The mathematical closed-form equations to solve the optimization problem have eight variables which represent the planar coordinates of each one of the apexes of the crossed four-bar linkage; to work with eight variables makes it very complex to find an optimal solution by means of analytical methods. Therefore, the genetic algorithms methodology (GA) has been selected for the optimization by the reason that GA is very useful in this kind of problems where the functions are difficult or impossible to differentiate and cannot be easily solved by analytic procedure (Holland 1975; Koza 1990).
Standard genetic algorithms proceed as follows: An initial population of individuals is generated at random or heuristically, and then the population evolves. Each individual represents one solution of the problem. At every evolutionary step, known as ‘generation’, the individuals are decoded and evaluated according to certain predefined quality criteria or fitness functions. To form a new population (the next generation), individuals are selected according to their fitness. Many selection procedures are currently in use, one of the simplest being Holland's original fitness-proportionate selection, where individuals are selected using a probability proportional to their relative fitness. This ensures that the expected number of times an individual is chosen is approximately proportional to his/her relative performance in the population. Thus, high-fitness individuals stand a better chance of ‘reproducing’, while low-fitness ones are more likely to disappear. Genetic algorithms are stochastic iterative processes with no guarantee of convergence. The termination condition may be specified as some fixed maximal number of generations or as the attainment of an acceptable fitness level.
Genetic algorithms have been programmed under Matlab 6.7 environment (MathWorks, Inc). This program makes it possible to modify the crossover probability, the mutation probability and the population size. Several calculations had to be performed to fit these parameters in order to accelerate the convergence to reach the optimal solution for the problem.
The human knee motion calculated with Walker et al. (1985) model has been used as the optimal solution towards which the solution evolves. The coordinates of the four apexes and the input angle α of the crossed four-bar linkage have been employed as input parameters. The evaluation stage has been carried out using the equations which express the ICR position of the crossed four-bar mechanism given the angular position of the coupler link and upon comparison with the optimal solution.
Before commencing the optimization process, a few constraints have been implemented in order to retain the variable parameters as the coordinates of a four-bar linkage.
The segments L1, L2, L3 and L4 are considered to be rigid bodies. The segment L1 is considered as the fixed bar of the four-bar linkage.
The length of the links must not satisfy the Grashof condition in order to avoid an undetermined solution. The condition states that if: L1 + L4 > L2 + L3 then the mechanism is a Grashof mechanism and at least one link will be capable of performing a full revolution. On the contrary, if the mechanism is non-Grashof, all the combinations of the links will be double rockers and not one of the links will be capable of a full rotation.
The motion range of the four-bar mechanism should be limited to the normal range of the knee motion. The motion range has been set at 120°.
It was assumed that the orthotic knee joint should not be larger than the human knee in order to avoid a bulky solution.
Gene codification has been conducted using an integer (six bit integer) approach. Although some methodology to code floating point numbers has been described in the bibliography (Herrara et al. 1998), binary codification has certain advantages such as better schema representation (Whitley 1994). The main drawback for binary representation is the numerical precision, but in this case the minimum representation is higher than the mechanical precision required. Binary representation uses the Gray code as proposed by Caruana and Schaffer (1988) to avoid hidden bias in the convergence.
In order to minimize variability, to reduce the size of the required population and the convergence time, the numeric representation per gene was scaled between the minimum and maximum possible values per each variable. These limitations were set by design requirements, and following this, the integer representation of the gene was scaled within the range in accordance with the formulae

The initial population size was 250 individuals. The evolution strategy includes a mutation of 10% of the individuals from each generation. From previous trials it was discovered that retaining 1% of the most suitable fathers for the next generation accelerates the convergence. The fitness function was the inverse of the product of the means square error times the maximum overall error. For any non-possible solution the fitness function returned to zero. This approach ensures a satisfactory match throughout the whole movement range.
Results
Genetic algorithms methodology continues to explore the area of solutions searching for a better solution along each stage of the iteration process. As such, it has been necessary to execute the procedure several times. More than 10 different solutions of the four-bar linkage were obtained and any subsequent attempt to carry out further iteration failed to provide a better solution. Therefore, the best possible mechanical solution using a crossed four-bar linkage and while retaining the previously mentioned limitations concerning low-bulkiness and range motion, was finally selected. The ‘optimal crossed four-bar linkage’ (OCFL) was finally considered to be the most appropriate solution.
Figure 4 compares the motion between a human knee represented by the goal curve and established using the Walker et al. model, and the five best solutions obtained from running the software using the genetic algorithms methodology. As can be seen in Figure 4, there was very little difference between these solutions. Nevertheless, it is possible to notice that each solution significantly improves the convergence with the knee motion model. The maximum difference between the motion of each solution and the pathway established using the biomechanical model, which represents the human knee motion at 60 mm laterally from the centre of the knee, was reduced by 1 mm on average in each stage of the iteration process. It can also be observed that although the curves of movement generated by the different four-bar linkage mechanisms are more rounded than the curve calculated using the Walker et al. (1985) model, the maximum difference between OCFL and human knee motion is lower than 2 mm throughout the whole range of knee flexion from 0 – 120°.
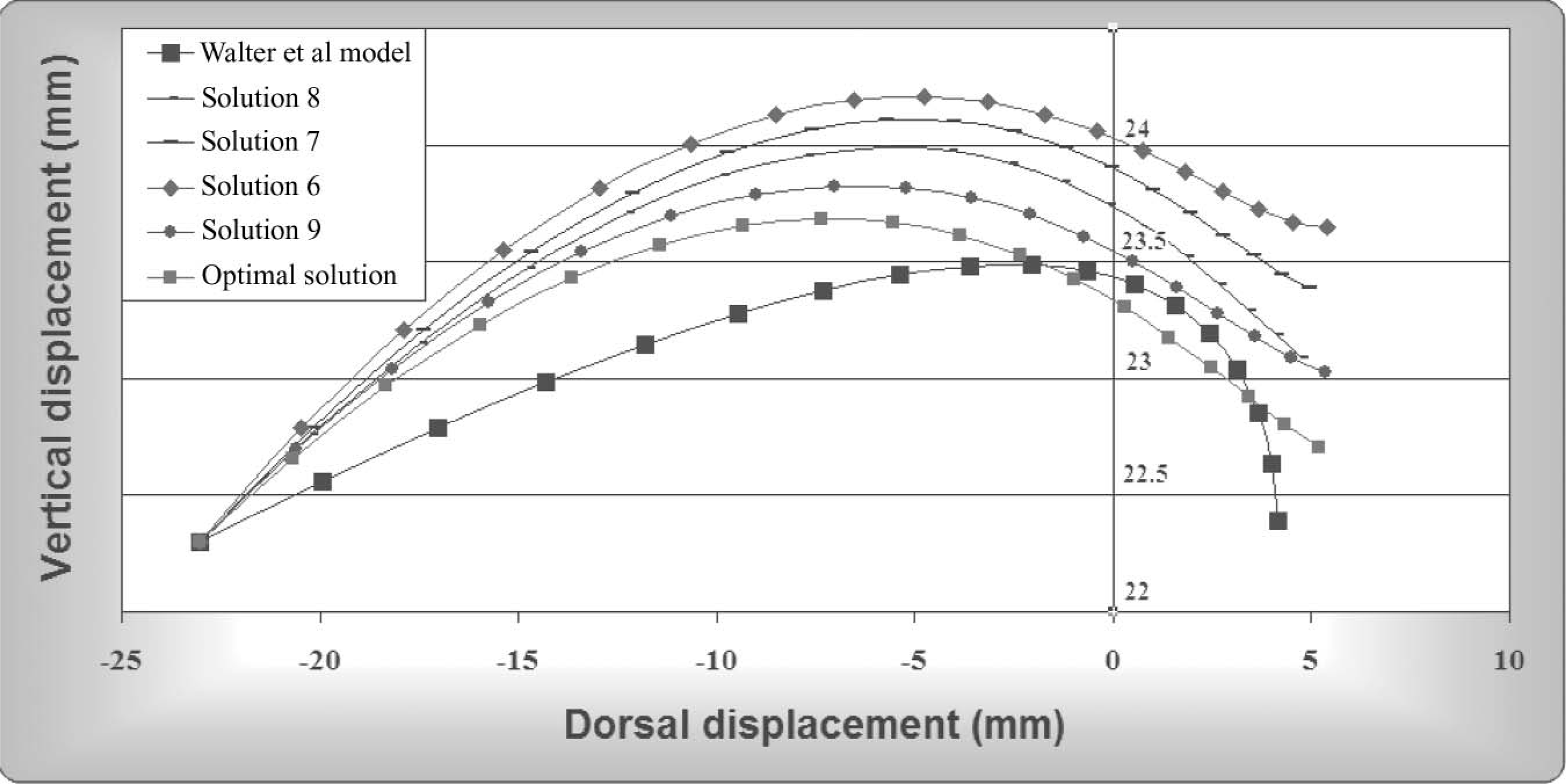
Representation of the different solutions obtained with the GA methodology and the Walter et al. (1985) model of the human knee motion.
The IHA motion of two common knee hinges: A common monocentric hinge and a polycentric hinge with a radius of 8 mm in both gears assembly, has been calculated theoretically. The monocentric hinge can be represented by a point representing the centre of its movement and the polycentric hinge motion can be determined using the common formulae of the gears motion. Figure 5 represents the path performed by the polycentric hinge and the OCFL compared with the human knee motion. In Figure 5, it is possible to observe that the OCFL follows the human knee movement, according to the knee model, significantly more accurately than the other solutions. The motion performed by the polycentric hinges is highly non-physiological and very different to the human knee motion.
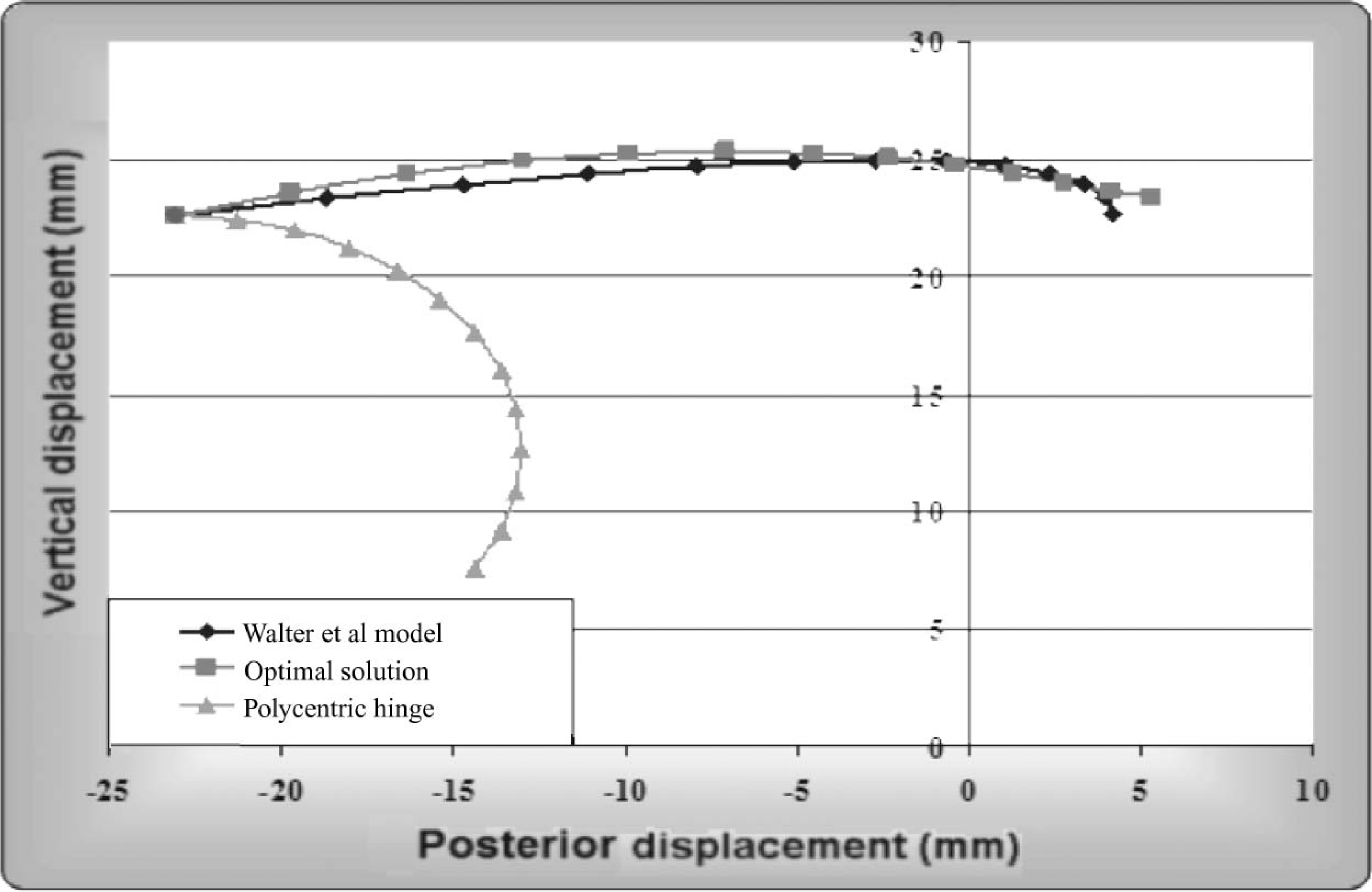
Comparison between theoretical motion curves of different orthotic knee joints.
The error defined as the difference in position between the human knee motion and the motion performed by different hinges has been determined at different degrees of knee flexion along the whole range from 0 – 120°. This error represents the kinematical incompatibility between the orthosis hinge and the human knee.
Table I represents the difference of position between each one of the three different knee hinges and the human model (mm) in the different degrees of the full range of the knee motion. As can be seen in this table, a common monocentric hinge has a maximum misalignment of up to 27.212 mm and a polycentric hinge with a radius of 8 mm in the gears has a maximum misalignment of 23.920 mm. The maximum misalignment produced by the OCFL hinge is 1.993 mm. This improvement is very significant, showing a better adjustment between the new concept of orthotic hinge (OCFL) and human motion.
Differences in position regarding the human model of the knee motion (mm).
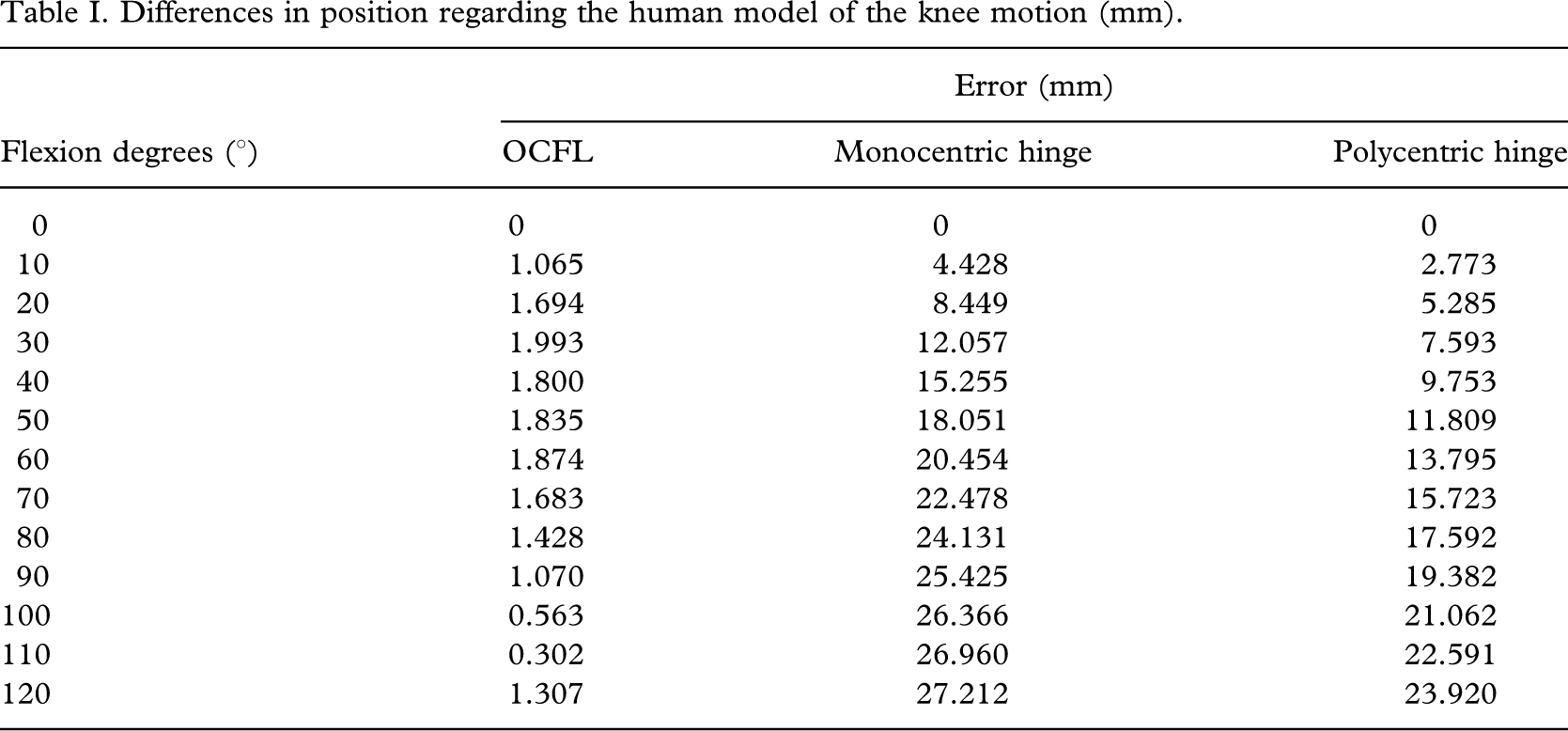
Monocentric and polycentric hinges enlarge the error as the knee flexes, whilst the OCFL hinge significantly reduces the error in the last degrees of flexion. This is particularly noteworthy due to the fact that the OCFL could improve general comfort during the execution of certain everyday tasks such as standing up or sitting down in a chair, negotiating stairs and slopes, etc.
The OCFL hinge also reduces the error in the first degrees of flexion. This will enable the user of this optimally-fitted orthosis to comfortably perform certain tasks requiring fewer degrees of flexion, the most important being walking.
Table II shows the mean and the standard deviation of the error, determined as the difference in position, and the cumulative error in a complete range of flexion. The cumulative error represents the total distance that must be compensated by means of relative movements between the orthosis and the leg of the orthotic user. These movements are translated to upper and lower displacements of the orthosis when the user flexes the knee and can cause the appearance of friction and shear stresses in the orthotic-user interaction. Shear stresses reduce the comfort and could be harmful to the skin.
Mean error and cumulative error between different hinges and knee human motion.
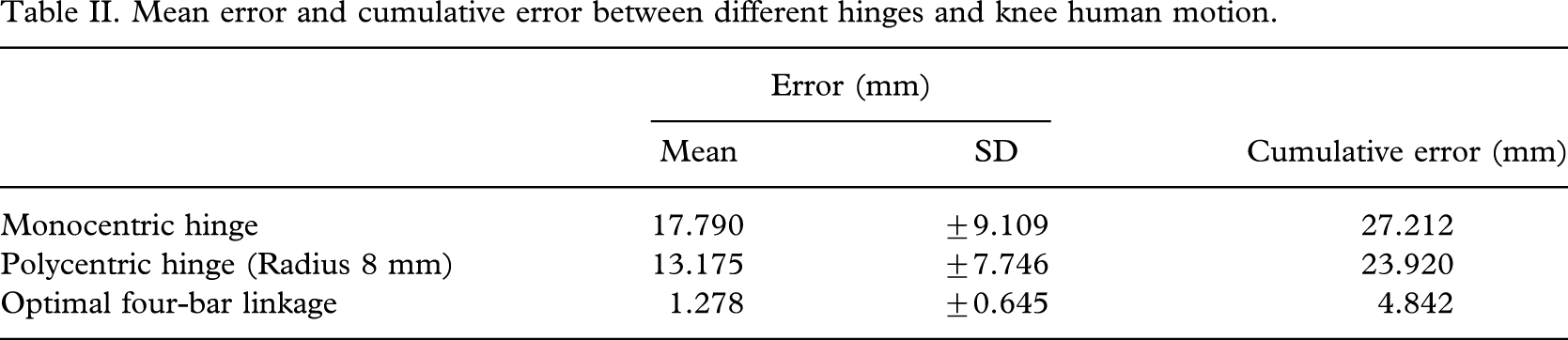
Figure 6 shows our knee design which is intended to represent an adaptable and interchangeable knee hinge. To fulfil that purpose two holes have been set on each bar to connect the hinge to the orthosis. The plates have been shaped in order to preserve the natural motion range of the human knee joint: Minimum 0° to maximum +120° and to prevent further rotations.

Representation of the optimal knee hinge design based on a four-bar linkage mechanism.
Discussion
As has been mentioned, the comfort, safety and reliability provided by the leg brace are likely to be a function of the mechanical compatibility between the knee hinge and the knee. Therefore, the knee hinge is of vital importance in a lower limb orthosis (Lewis et al. 1984b), and major improvements in these orthotic devices should be focus on that. This study broadly shows that any orthosis based on monocentric or polycentric hinges, which are commonly used by the majority of physicians, do not, in theory, properly follow the motion performed by the human knee. As such, hinges based on monocentric or polycentric mechanisms may not be most appropriate, in terms of mobility, for functional orthoses or modern SCOs in which knee movement is allowed and kinematical compatibility is required.
Although there are more knee hinges based on the four-bar linkage mechanism, it is important to note that every orthotic knee hinge based on a four-bar linkage mechanism could be different and display different motion. This is due to the fact that the family of curves able to adopt the displacements of the intersection of the lateral bars of an articulated four-bar linkage mechanism is infinite, when considering the lengths of the bars as possible input variables for determining the evolution curve. The solution curve searched for in the OCFL is that which corresponds to the intersection of the IHA with the plane containing the orthotic hinge, as described above. The result is the crossing of infinite solutions to arrive at only one that could be defined by the mechanical properties of each user's knee. None of the knee hinges commercially available in today's market reflect a design based on a four-bar linkage mechanism which follows and reproduces the physiological movement of the IHA of the knee.
The great scientific effort applied to the development of a new intelligent and automatic orthosis with an increased number of modern sensors and actuators, is not completely useful unless the existing concept of a knee hinge can be improved. The new concept of a hinge as presented in this article has been proven to represent a great improvement in the fields of orthotics and rehabilitation. It has been theoretically shown that the maximum difference of movement between the OCFL and the human knee motion is lower than 2 mm throughout the whole range of knee flexion from 0 – 120°, this difference could be totally accounted for by the skin deformation, preventing the generation of internal pressures within the knee. Although the main purpose of SCOs is to allow knee flexion during swing phase of the gait the authors have considered the whole range from 0 – 120° so as to fulfil the complete variety of requirements of use, sitting and standing up, stepping up and down, etc.
In this study, knee motion has been determined using biomechanical models, which are limited because the majority of these are extracted from in vivo bodies. Articular motion differs between in vivo and in vivo bodies due to the lack of physiological tonus of musculature. Moreover, articular motion varies between different people, depending on body mass, height, gender, age and pathological conditions. All these evidences support the idea that orthotic hinges should be designed in a personalized and customized manner for each user. Knee hinge designs based on four-bar linkage mechanisms are independent of the methodology used to calculate the motion path or curve. Therefore, following the methodology presented in this paper it could be possible to design orthotic knee hinges in a customized manner since the determination of the path followed by IHA of the knee motion for each user. Although describing the mechanism and motion of human joints still remains a hard problem, in several studies the IHA has been proved to be a valuable concept and the possible experimental faults and inaccuracies have been widely studied and their influence are explained and known, thus the determination of the path performed by the IHA of the knee is achievable (Woltring et al. 1985; Soudan et al. 1979).
The new concept of orthotic design will notably improve the adaptability of lower limb orthoses for the user, providing the following advantages:
Comfort: Kinematic compatibility avoids the relative movement between the orthosis and the lower leg, thereby the knee joint provides increased comfort; Safety: Ligament protection. The OCFL joint avoids the generation of unwanted pressures at the knee level, providing internal soft tissue protection.
Besides the biomechanical improvements, it is important to observe that the ease of manufacturability is also an improvement in design. Orthotic hinges based on crossed four-bar linkages can be manufactured cheaply by means of two lateral plates with holes at the same position as those displayed in the OCFL during the optimization procedure. These plates can also be integrated with a cover in order to avoid the pinching effect, due to the free space that is between the parts. Design enhancement solves the problem of the excessively high level of accuracy which is required in the manufacturing process of certain orthotic hinges such as polycentric hinges.
The authors of this study strongly believe that this new concept of a knee orthosis will cause a modernization in the field of orthosis design and will enable people with lower limb mobility problems to attain a more comfortable use of orthotic devices. Although the new concept of an orthotic knee joint, depicted in this study, represents a vast improvement in functional orthosis, further research should be conducted in order to validate this with orthotic users, and further work should be made in the materials and the mechanical design so as to improve certain aspects, such as resistance, weight and size to get a better product for real use.
From the results of this study, the main conclusions reported by the authors are:
None of the current knee orthoses follow the proper motion curve to render them reasonably compatible with the human knee; From a clinical point of view, knee orthoses should be adequately fitted and adapted to the user; External knee joints must be kinematically compatible with the user's knee, which means that an optimal knee hinge should perform the motion curve described by its relative placement to the bone geometry; Four-bar linkage mechanism is suitable for following the required motion path and can be designed using optimization methodologies; The genetic algorithms methodology is shown to be a good mathematical tool for solving complex problems such as the establishment of an optimal four-bar linkage for reflecting a required curve motion; Genetic algorithms will enable the design of a personalized knee joint, which will have the same kinematic characteristics as the subject wearing the orthotic device.
Footnotes
Acknowledgements
The authors gratefully acknowledge the funding support of the European Action Line IST2002-I.2.1 ‘Systems for Independent Living’ and the programme ‘Torres Quevedo’, financed by the Spanish Ministry for Education and Science and the European Social Fund. They would like to thank the R + D + i Linguistic Assistance Office at the Universidad Politécnica de Valencia for their help in revising this paper.