
Abstract
The Shape&Roll prosthetic foot was used to examine the effect of roll-over shape arc length on the gait of 14 unilateral trans-tibial prosthesis users. Simple modifications to the prosthetic foot were used to alter the effective forefoot rocker length, leaving factors such as alignment, limb length, and heel and mid-foot characteristics unchanged. Shortening the roll-over shape arc length caused a significant reduction in the maximum external dorsiflexion moment on the prosthetic side at all walking speeds (p < 0.001 for main effect of arc length), due to a reduction in forefoot leverage (moment arm) about the ankle. Roll-over shape arc length significantly affected the initial loading on the sound limb at normal and fast speeds (p = 0.001 for the main effect of arc length), with participants experiencing larger first peaks of vertical ground reaction forces on their sound limbs when using the foot with the shortest effective forefoot rocker arc length. Additionally, the difference between step lengths on the sound and prosthetic limbs was larger with the shortest arc length condition, although this difference was not statistically significant (p = 0.06 for main effect). It appears that prosthesis users may experience a drop-off effect at the end of single limb stance on prosthetic feet with short roll-over shape arc lengths, leading to increased loading and/or a shortened step on the contralateral limb.
Introduction
Several investigators have studied persons with unilateral trans-tibial amputations when walking with various types of prosthetic feet and have generally observed increased loading on their sound limbs compared with their prosthetic limbs and/or reduced step lengths on their sound sides compared with their prosthetic sides when using many kinds of prosthetic feet (Lehmann et al. 1993; Macfarlane et al. 1990; Powers et al. 1994; Mizuno et al. 1992; Snyder et al. 1995; Torburn et al. 1990; Wagner et al. 1987; Barth et al. 1992; Isakov et al. 1997). However, many of the studies demonstrated reduced sound limb loading when using a Flex-foot prosthetic foot in comparison with other prosthetic feet. The reason for the reduced sound limb loading when using the Flex-foot compared to other prosthetic feet is not clear although hypotheses have been formulated to describe these results. Lehmann et al. (1993) suggested that the differences could be attributed to better ‘push-off’ of the dynamic elastic response foot while Snyder et al. (1995) and Powers et al. (1994) suggested increased dorsiflexion when using the Flex-foot as a possible reason for reduced loading on the sound limb.
Other investigators have demonstrated that persons with unilateral gastrocnemius and soleus paralysis induced by nerve blocks or surgical excision tend to walk with shorter step lengths on the unaffected limb and/or with increased loading to the unaffected limb (Simon et al. 1978; Murray et al. 1978; Sutherland et al. 1980; Lehmann et al. 1985). The disabled plantar flexors in these cases led to a shortened excursion of the center of pressure in the direction of forward progression from heel contact to opposite heel contact (Sutherland et al. 1980). This shortened excursion reduces the functional length of the forefoot, reducing the movement arm of the foot about the ankle in terminal stance.
Recent work suggests that the Flex-foot prosthetic foot allows an increased length of the effective rocker (roll-over shape) in the forefoot region compared with other feet (Hansen et al. 2000, 2004). This longer effective rocker may reduce the ‘drop-off’ effect of the prosthesis and lead to reduced loading on the sound limb. Measures of effective forefoot leverage such as the effective foot length ratio (EFLR – see definition in the Methods section) have shown higher effective foot lengths in the Flexwalk foot (a foot similar to the Flex-foot) compared to other feet that were used clinically in the 1990s. The EFLR of the Flexwalk foot was comparable to that of the able-bodied ankle-foot system (Hansen et al. 2004).
It was hypothesized in this study that reductions in the forefoot arc length of the effective rocker of a prosthetic foot lead to a ‘drop-off’ effect, resulting in increased loading and shortened step lengths on the sound limbs of trans-tibial prosthesis users compared with their prosthetic limbs. These hypotheses were examined using a recently developed prosthetic foot named the Shape&Roll prosthetic foot (Sam et al. 2004). The Shape&Roll prosthetic foot was used because of the ability to shorten its effective foot length ratio with very minor alterations, thus keeping other properties such as heel stiffness, mid-foot stiffness, and weight of the foot relatively fixed.
Methods
Experimental protocol
A preliminary analysis suggested that fourteen subjects would be sufficient to determine differences equivalent to one standard deviation of the measurements, assuming allowable type I error of 5% and a power of 90% (Lieber 1990). Persons with unilateral trans-tibial amputations who walked with endoskeletal prostheses and without the use of assistive devices (e.g., canes or walkers) were recruited to participate in the experiment. Each potential subject went through the consent process with a member of the research team and signed a consent form approved by the Northwestern University Institutional Review Board prior to participation in the study. The subject's height, weight, age, and reason for amputation were collected at the time of the experiment.
After consent was obtained, the subject's prosthesis was taken to a separate laboratory and was disconnected at the junction of the socket and the pylon. The pylon was removed by loosening two of the four screws on the pyramid adjustment device in such a way that the alignment of the prosthesis could be preserved and re-established at the end of the study. In this way, the person's current socket could be used in the study to save time and to eliminate possible issues that could be present when fitting a new socket. The Shape&Roll prosthetic foot (Figure 1A) was then attached to the participant's socket using a different rigid pylon. The Shape&Roll prosthetic foot is made of copolymer plastic and was developed to conform to the roll-over shape of the able-bodied ankle-foot system during walking (Sam et al. 2004). The roll-over shape (effective rocker shape that is formed during walking) is established through the closing of cuts on the forefoot surface of the Shape&Roll prosthetic foot. A simple removable shell made of a soft foam material (Pelite®) and a nylon stocking were used to cover the foot during the experiment to blind the subject to the visual differences between the foot conditions (see Figure 1 and later text for a description of foot conditions).
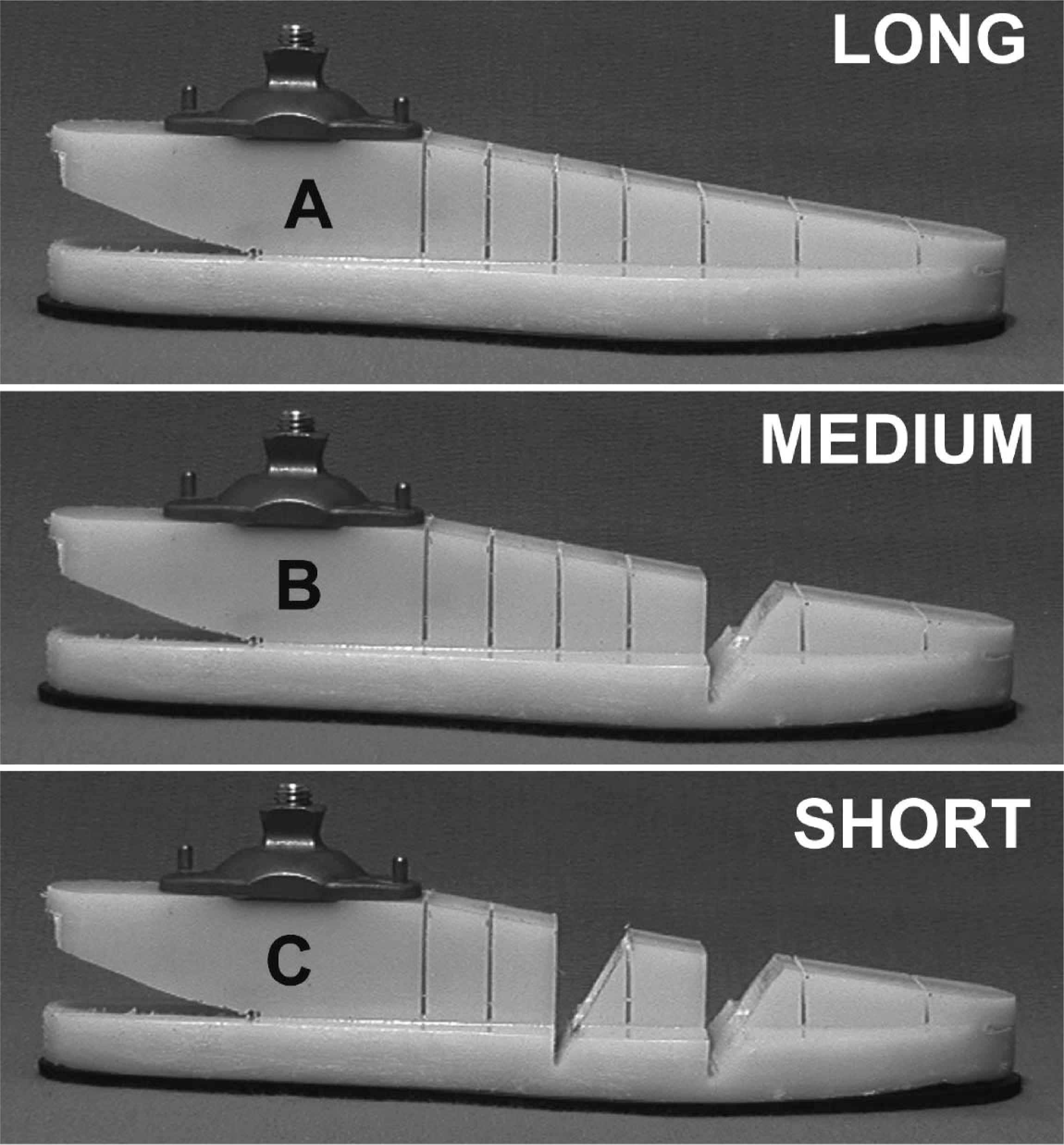
Photographs showing the three prosthetic foot conditions used in the study. (A) The unmodified Shape&Roll prosthetic foot was used to simulate a LONG roll-over shape arc length condition. The Shape&Roll prosthetic foot is made of copolymer polypropylene-polyethylene and was developed to deform to a roll-over shape similar to the non-disabled ankle-foot complex (Sam et al. 2004). (B) The Shape&Roll prosthetic foot with one wedge cut from its forefoot at approximately 70% of the foot's length was used to simulate a foot with a MEDIUM roll-over shape arc length. (C) The Shape&Roll prosthetic foot with two wedges cut from its forefoot (the second wedge being cut at approximately 60% of the foot's length) was used to simulate a foot with a SHORT roll-over shape arc length. The wedges allowed for increased bending of the forefoot portion distal to their locations, reducing forefoot leverage by preventing the centre of pressure of the ground reaction force from moving appreciably forward of the wedges prior to opposite heel contact.
Prior to motion analysis data acquisition, the manager of the motion analysis laboratory applied reflective markers to the subject's body. A modified Helen Hayes marker set was used for the study (Kadaba et al. 1990). Additional markers were placed on the socket at the approximate locations of the lateral femoral condyle, the anterior tibial tuberosity, and a lateral anterior location on the socket not in line with the other two socket markers. Markers for the ankle, heel, and toe (on the prosthetic side) were placed on a specially designed plate that was used to indicate the attachment surface and bolt-hole location for the prosthetic foot. Markers were placed on the specialized plate instead of the shoe to prevent moving them when the shoe was doffed and donned between conditions and to allow for possible comparison with previous studies of alignment (see Hansen et al. 2003 for more information on prosthesis marker placement). Markers on the participants were not altered throughout the experiment and all measurements and comparisons were made within subjects to remove variabilities in results due to marker placement. Marker positions were measured at 120 Hz during walking using an eight-camera real time motion analysis system (Motion Analysis Corporation, Santa Rosa, CA, USA). Synchronized ground reaction force measurements between the participant's feet and the floor were measured using six AMTI (Advanced Mechanical Technology, Inc., Watertown, MA, USA) force platforms.
The subjects in the experiment first walked with the Shape&Roll prosthetic foot as designed. This foot represented the LONG roll-over shape arc length condition for the study. The subjects were allowed approximately 5 min to acclimatize themselves to the foot after a dynamic alignment process was accomplished by an experienced prosthetist. Persons walked with the LONG foot condition at their normal freely selected speed, then at a slow self-selected speed, and lastly at a fast self-selected speed. Trials were repeated at each speed until data from five clean force platform hits had been collected for each of the sound and prosthetic limbs. Clean force platform hits were ones in which only one foot contacted a plate in the trial without that foot crossing any of the plate's borders. Sound and prosthetic side force platform hits were not necessarily captured in succession.
After completion of walking trials for the LONG foot condition, the subject removed the prosthesis. The foot was then altered as shown in Figure 1B. A wedge was removed from the forefoot of the Shape&Roll prosthetic foot at about 70% of the foot length using a band saw. This wedge was cut with the intention of shortening the arc length of the person's roll-over shape on the prosthetic side to see potential impacts on the sound and prosthetic limbs. The foot condition with one wedge removed will be referred to as the MEDIUM foot condition because it has a roll-over shape with the middle effective arc length of the three foot conditions tested.
The prosthesis with the MEDIUM foot condition attached was returned to the motion analysis laboratory by the technician and was then donned by the participant. The alteration to the foot was covered and not revealed to the participant. No alignment changes were made. The participant then walked on the foot for approx. 5 min to become accustomed to the new foot condition. After the participant felt comfortable with the new foot condition, gait data trials were captured. Subjects were asked to walk at normal, slow, and then fast self-selected speeds until five clean force platform hits were collected for each foot at each speed condition.
The prosthesis was again removed and a second wedge was cut out of the prosthetic foot proximal to the first wedge at about 60% of the foot length (Figure 1C). This cut created what will be called the SHORT foot condition, since it resulted in the prosthetic foot with the shortest roll-over shape arc length. The prosthesis was returned to the participant, he/she became accustomed to the SHORT foot condition, and gait analysis trials were performed in the same way as they were with the other two foot conditions.
After all data were collected, the participant's prosthesis was returned to its original state (i.e., the original prosthetic foot and pylon were replaced onto the socket with the original alignment) and was returned to the participant.
Preliminary testing of prosthetic feet
Preliminary quasi-static testing of the three feet conditions, using methods described in Hansen et al. (2000), yielded roll-over shapes for the three foot conditions as indicated in Figure 2. The effective foot length ratio (EFLR) was used as a measurement to compare the three prosthetic foot conditions in this study with commercially available feet previously tested (Hansen et al. 2004). The effective foot length is the distance from the heel of the prosthetic foot to the most anterior portion of the roll-over shape. The anterior end of the roll-over shape, measured using the quasi-static method, refers to the position of the centre of pressure in a prosthetic foot coordinate system for a foot that is loaded at body weight and at an angle that roughly corresponds to the angle of the shank (lower leg segment) at the time of opposite heel contact (Hansen et al. 2004). The EFLR is the effective foot length divided by the total foot length and when multiplied by 100, it gives a percentage of the total foot length used during a walking step. The resulting EFLR values for the feet in preliminary tests were 0.62 for SHORT, 0.74 for MEDIUM, and 0.82 for LONG. These values cover the range reported by Hansen et al. (2004) for 15 commercially available prosthetic feet that were tested previously (EFLR values for the feet ranged from 0.63 – 0.81). Thus, the prosthetic foot conditions used in this study were believed to be representative of a wide range of prosthetic feet.
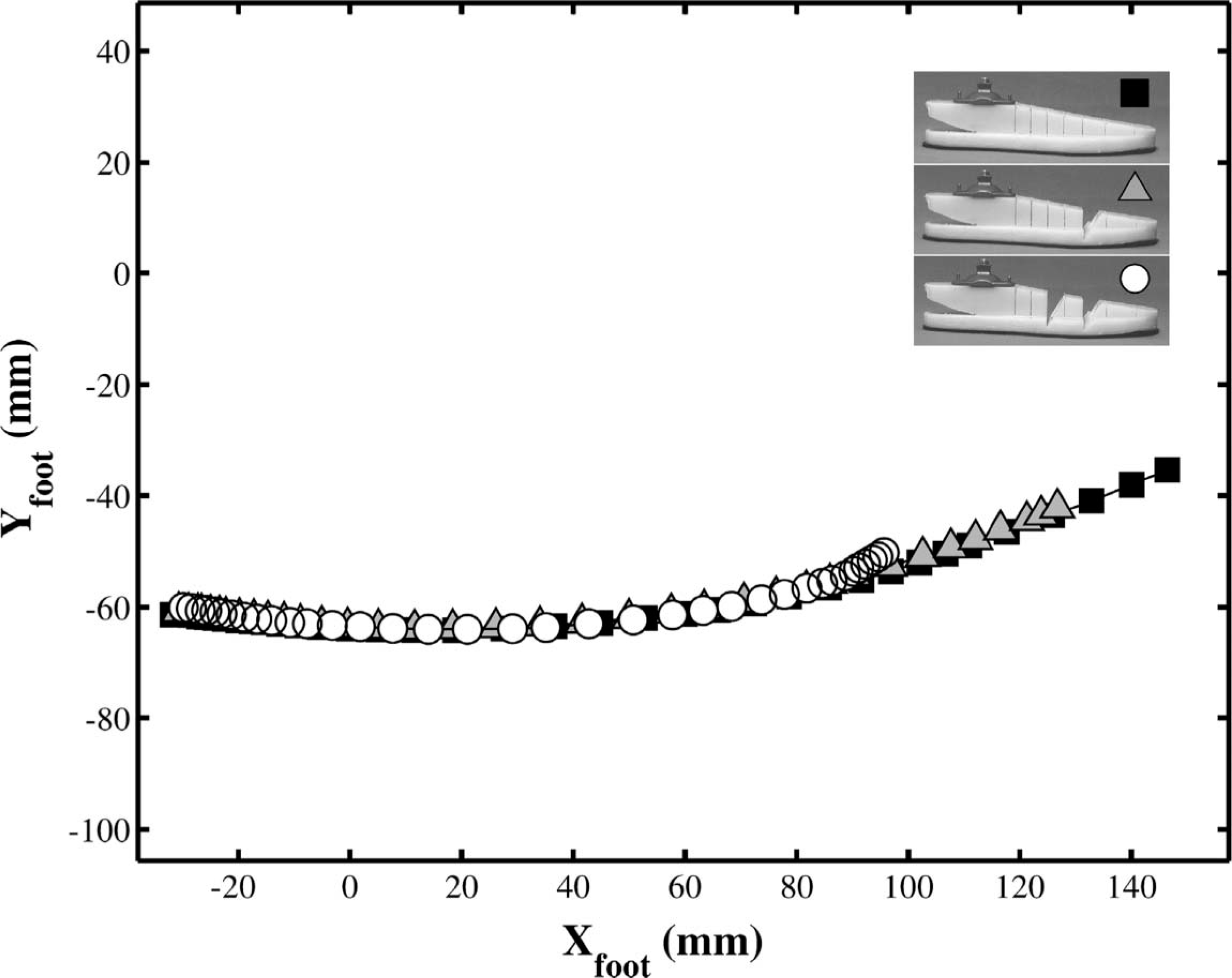
Roll-over shapes of the three prosthetic foot conditions used in the study resulting from quasi-static testing methods of Hansen et al. (2000) (black squares – LONG; grey triangles – MEDIUM; white circles – SHORT). The roll-over shapes reflect the centre of pressure of the ground reaction forces in a coordinate system fixed to the attachment surface of the prosthetic foot and signify an effective rocker shape that the feet conform to during walking. The origin (0,0) of the plot indicates the point on the attachment surface that is also at the centre of the bolt hole. Roll-over shapes are similar for all three prosthetic feet but have different lengths in the forefoot section (i.e., ahead of the bolt-hole).
Data processing
The following variables were analysed in the study: (i) walking speeds, (ii) differences between maximum external dorsiflexion moments during stance phase of the sound and prosthetic limbs, (iii) differences between prosthetic and sound limb step lengths, and (iv) differences between first peaks of the vertical ground reaction forces for the sound and prosthetic limbs. Differences between limbs were used as opposed to the actual values for each limb to account for variability in these measures that arise from changes in walking speed. The effective foot length ratios (EFLR) were also measured directly from walking data as the distance from the heels of the feet to the anterior ends of the ankle-foot roll-over shapes (Hansen et al. 2004) divided by the overall lengths of the feet. EFLR data were measured for both the sound and prosthetic side ankle-foot systems.
Median sound and prosthetic limb difference data as described in the previous paragraph and the median walking speeds for each subject at each walking condition (foot-speed combination) were checked for normality using the Shapiro-Wilk Test of Normality. Medians were used to characterize these data sets because they are less susceptible to outliers when compared with means. A total of 36 data sets were tested because there were nine conditions (three walking speeds and three prosthetic feet) for each of the four measured variables mentioned in the previous paragraph. Because 34 of 36 data sets were found to be normally distributed, 3×3 two-way repeated measures ANOVA tests were used to compare data sets for three walking speeds (slow, normal, and fast), for the three foot conditions (LONG, MEDIUM, and SHORT), and for the interaction between speed and foot conditions. Mauchly's Test of Sphericity was performed on each data set to test assumptions of the ANOVA test. When the assumption of sphericity was violated, the Greenhouse-Geisser correction factor was used to determine the p value. When main effects were found to be significant at a level of p < 0.05, pairwise comparisons were made using Bonferroni adjustments for multiple comparisons. Values for p were adjusted by the software to reflect the Bonferroni correction (i.e., adjusting the cut-off p values to 0.05). A commercially available software package was used to conduct all statistical analyses (SPSS, Chicago, IL).
Results
Research participants
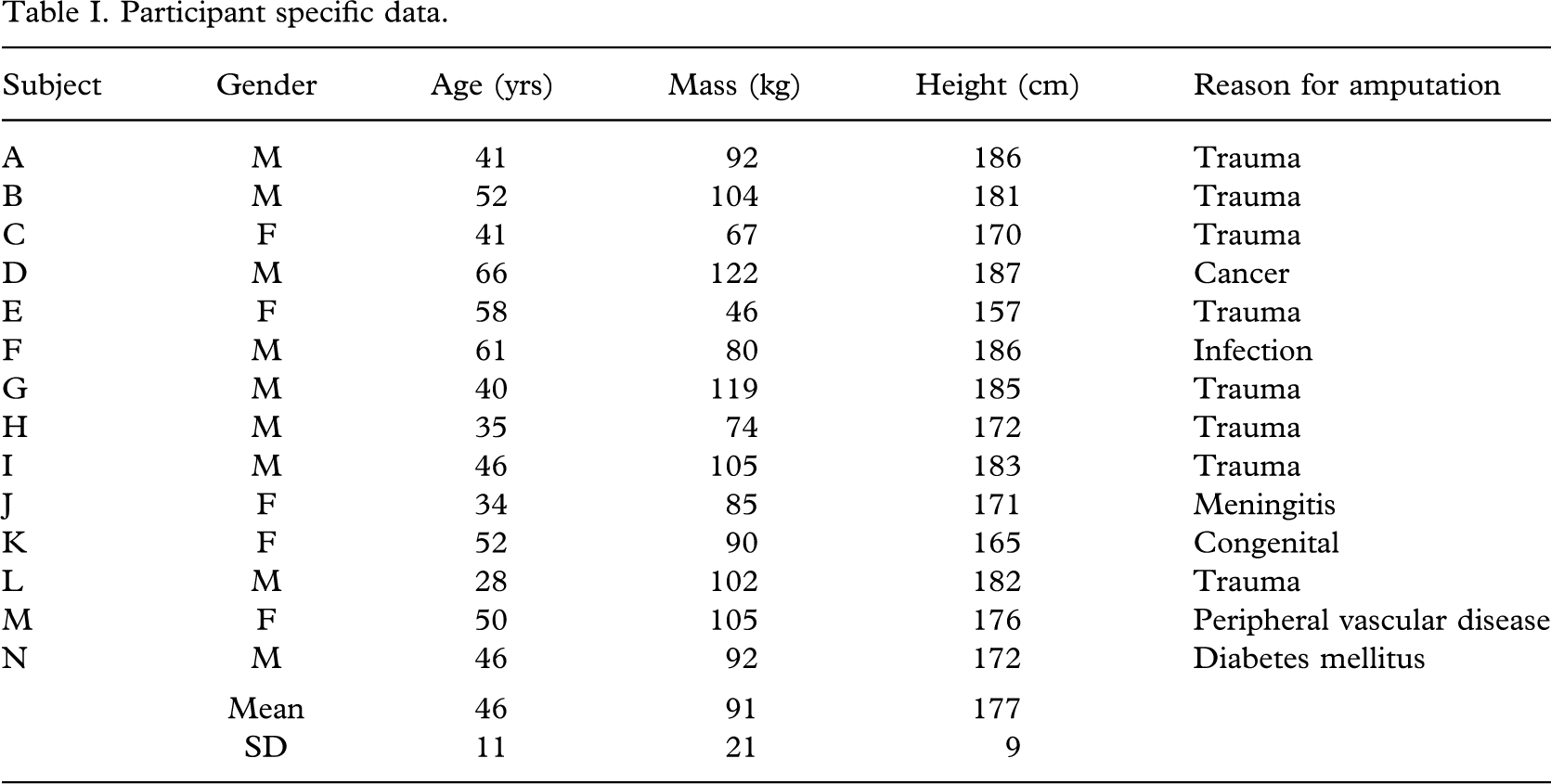
Sixteen persons with unilateral trans-tibial amputations participated in the study. One subject did not walk fast enough to utilize the increased arc lengths of the MEDIUM and LONG foot conditions. Her fastest walking speed was 0.85 m/s, which was accomplished using short step lengths that required minimal forward rolling on her feet. As a result, the roll-over shapes of all three prosthetic foot conditions were similar. Another subject was eliminated from the study because she was inadvertently coached to walk with equal step lengths prior to data collection. Thus, only data from 14 subjects were used in the data analysis (9 men and 5 women). Data describing the fourteen subjects that were included in the data analysis are shown in Table I.
Participant specific data.
Effective foot length ratios (EFLRs)
The median EFLRs for the 14 subjects vs. median speeds are shown in Figure 3. The EFLRs on the sound limb appear to be only minimally affected by the arc length of the prosthetic foot, while the EFLRs on the prosthetic side are clearly affected by the imposed changes to the prosthetic foot in the study. All EFLR values appear to increase as participants go from slow to normal walking speeds and then remain relatively constant from normal to fast speeds. On the prosthetic side, the EFLR was significantly affected by the arc length (p < 0.001) and by the walking speed (p < 0.001), but not by the interaction between arc length and walking speed (p = 0.231). Pairwise comparisons showed that EFLRs on the prosthetic side were significantly different between all foot conditions (p ≤ 0.001 for all comparisons) and between slow and normal (p = 0.001) and slow and fast walking speeds (p = 0.001) but not between normal and fast walking speeds (p = 0.083). The sound side EFLR was also significantly affected by the arc length of the foot on the prosthetic side (p = 0.007) and by the walking speed (p = 0.004), but not by the interaction between arc length and walking speed (p = 0.114). Pairwise comparisons showed that the EFLR on the sound side was significantly different between LONG and SHORT conditions (p = 0.033) but not between LONG and MEDIUM (p = 0.258) or MEDIUM and SHORT foot conditions (p = 0.205). EFLRs on the sound limb were also significantly different between slow and normal (p = 0.022) and slow and fast speeds (p = 0.010), but not between normal and fast speeds (p = 0.062).
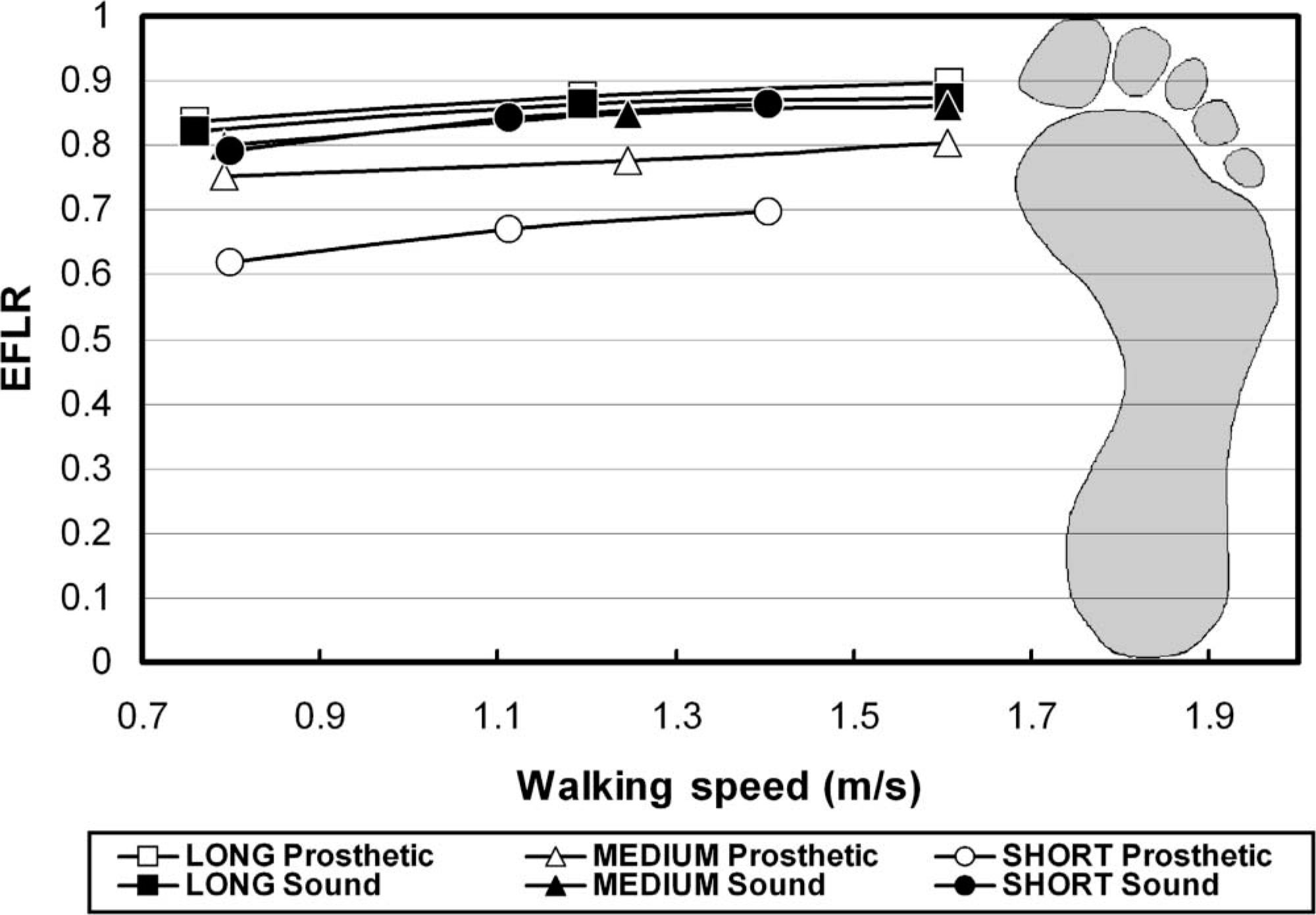
The median Effective Foot Length Ratios (EFLRs), measured from dynamic roll-over shape data, vs. median walking speeds for the 14 subjects in the experiment. The EFLR is a fraction of the total foot length that is effectively used during the stance phase and prior to unloading (i.e., from heel contact to opposite heel contact) (Hansen et al. 2004). Black filled symbols represent EFLR values for the sound limb while white filled symbols represent EFLRs for the prosthetic limb. The sound side EFLRs do not appear to be drastically affected by the prosthetic foot roll-over shape arc length. The prosthetic side EFLRs are affected by the foot conditions as expected. Both sound and prosthetic side EFLR values increase somewhat with walking speed.
Walking speed
Walking speed values were significantly affected by speed category (p < 0.001) and by the arc length of the foot (p = 0.003), but not by the interaction between speed and arc length (p = 0.249). Post-hoc comparisons revealed that all three speed ranges (slow, normal, and fast) were significantly different than one another as expected (p < 0.001 for all group comparisons). Walking speeds used when walking with the SHORT arc length foot were significantly slower than those for the MEDIUM arc length foot (p = 0.001). The speeds used when walking with the LONG and MEDIUM arc length feet were not significantly different (p = 0.434). The speeds used when walking with the LONG arc length foot were faster compared to those for the SHORT arc length foot although this difference was not found to be statistically significant (p = 0.081).
External ankle dorsiflexion moments (sound side – prosthetic side)
The mean external ankle dorsiflexion moment curves for one of the subjects walking at his normal self-selected speed are shown in Figure 4. As the arc length of the prosthetic foot's roll-over shape was decreased, the maximum ankle dorsiflexion moment on the side of the prosthesis (seen at approximately 80% of stance phase) also decreased. The sound limb's maximum ankle dorsiflexion moment was not affected appreciably by the shortening of the arc length on the prosthetic side.
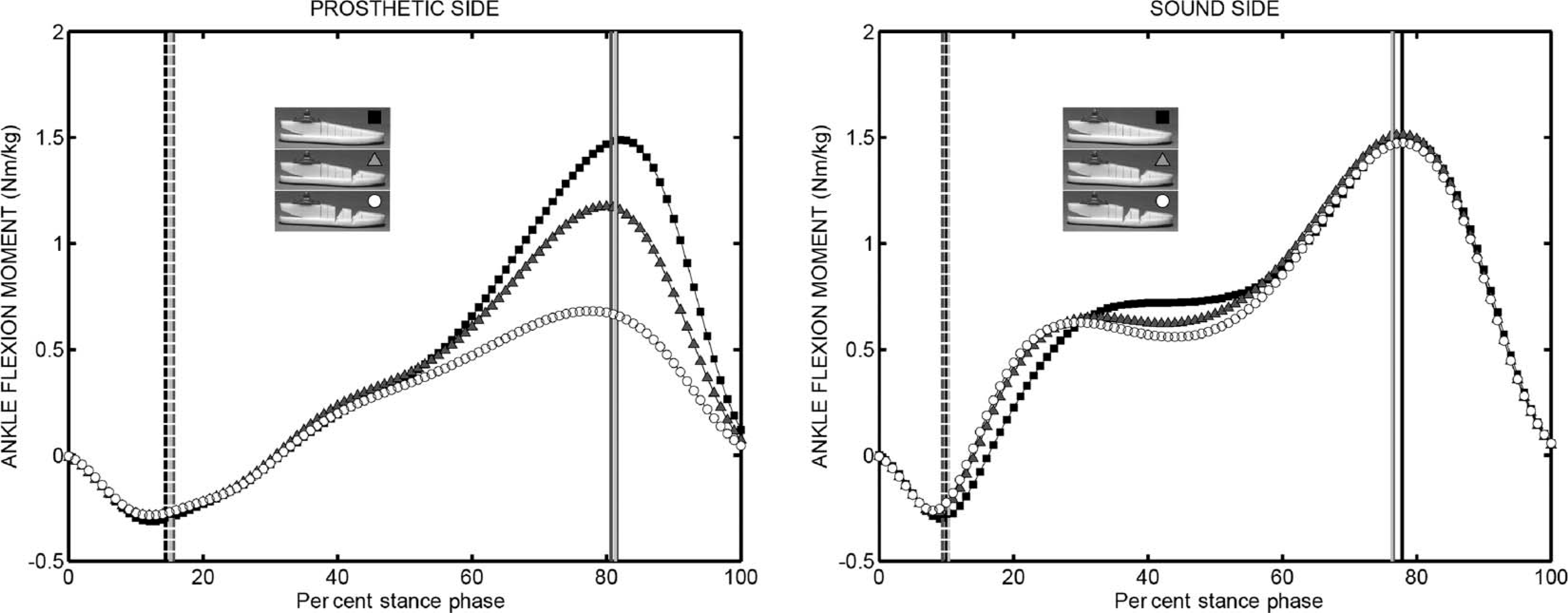
External ankle dorsiflexion moments (normalized by body mass) for the prosthetic side (left) and sound side (right) of one representative subject walking at his normal self-selected speed (black squares – LONG; grey triangles – MEDIUM; white circles – SHORT). The maximum dorsiflexion moments at late stance on the prosthetic side were reduced as roll-over shape arc lengths were decreased. Vertical lines in the plots indicate times of opposite toe off and opposite heel contact (black – LONG, dark gray – MEDIUM, and light gray – SHORT; dashed lines – opposite toe off, solid lines – opposite heel contact).
The median differences between the maximum external ankle dorsiflexion moments on the sound and prosthetic sides for each of the walking conditions are shown in Figure 5 (with lines extending to the first and third quartiles) as a function of walking speed. The data indicate that the asymmetry in peak external dorsiflexion moments between the sides was highest with the SHORT foot condition and lowest with the LONG foot condition. Statistical analysis indicated that the difference in maximum dorsiflexion moments between sides was significantly affected by the walking speed (p < 0.001), the arc length (p < 0.001), and the interaction between walking speed and arc length (p < 0.001). Pairwise comparisons showed significant differences between all arc length conditions (p < 0.001 for all group comparisons) and between all speed conditions (fast-normal: p < 0.001; fast-slow: p = 0.001; normal-slow: p = 0.037). Pairwise comparisons of the interaction term showed that the difference in maximum dorsiflexion moments between sides for all possible comparisons of speed and arc length conditions were significantly different (p ≤ 0.001).
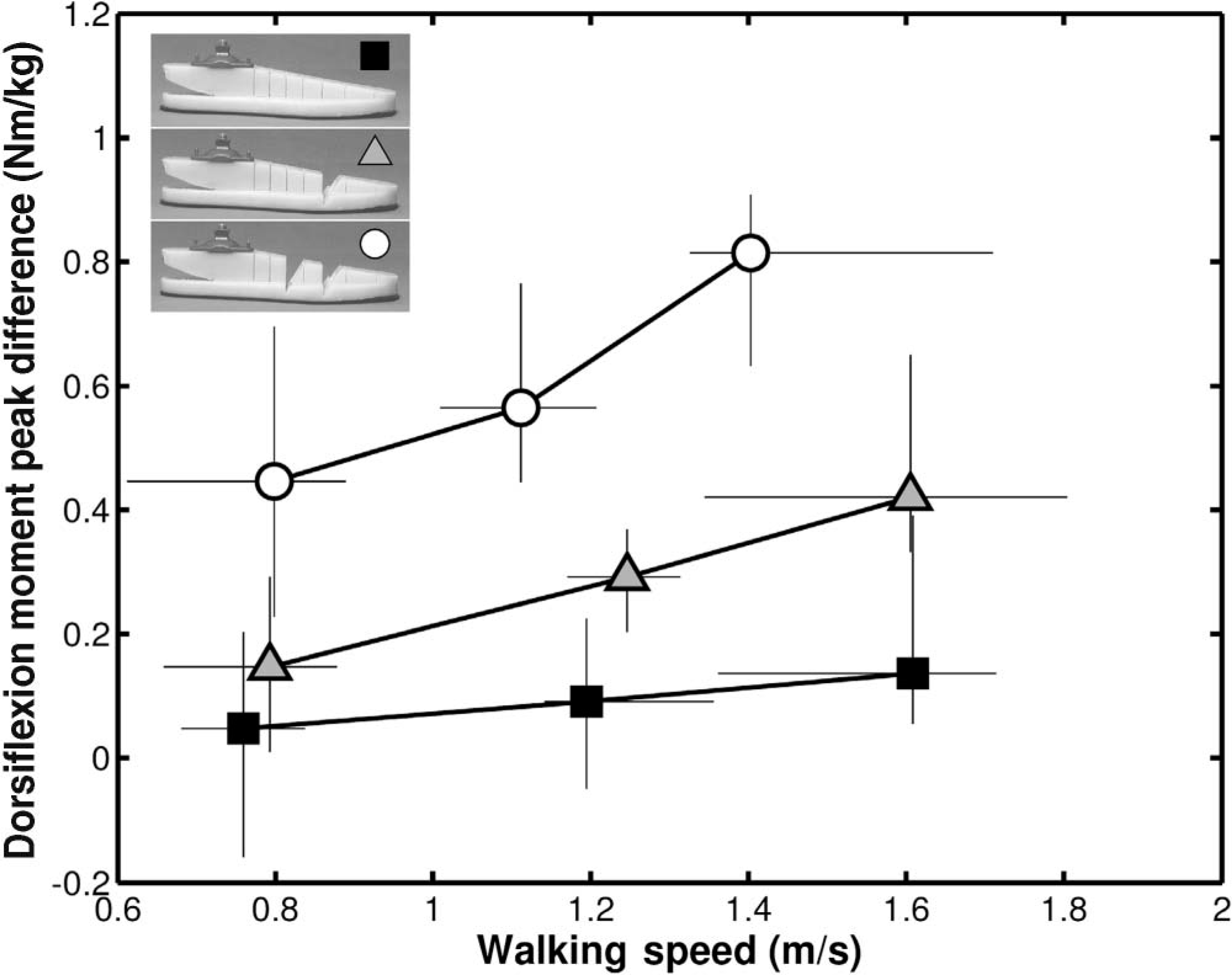
Median differences between maximum ankle dorsiflexion moments on the sound and prosthetic sides vs. median speeds for similar walking speed and arc length conditions for the 14 subjects in the experiment (black squares – LONG; grey triangles – MEDIUM; white circles – SHORT). Lines extend from the first to third quartiles of each data set for both speed and dorsiflexion moment peak differences. Differences in peak ankle dorsiflexion moments were increased when prosthetic foot roll-over shape arc length was decreased.
Step length asymmetry (prosthetic side – sound side)
The median differences between the prosthetic and sound limb step lengths for walking under the nine conditions of the study (speed and arc length combinations) are shown in Figure 6 (with lines extending to the first and third quartiles) as a function of walking speed. In the Figure, it appears that the step length difference is greatest when walking with the SHORT foot condition although there is a large amount of variability in the data. Statistical analysis showed that the step length difference was not significantly affected by walking speed (p = 0.583), arc length (p = 0.062), or the interaction between walking speed and arc length (p = 0.484).
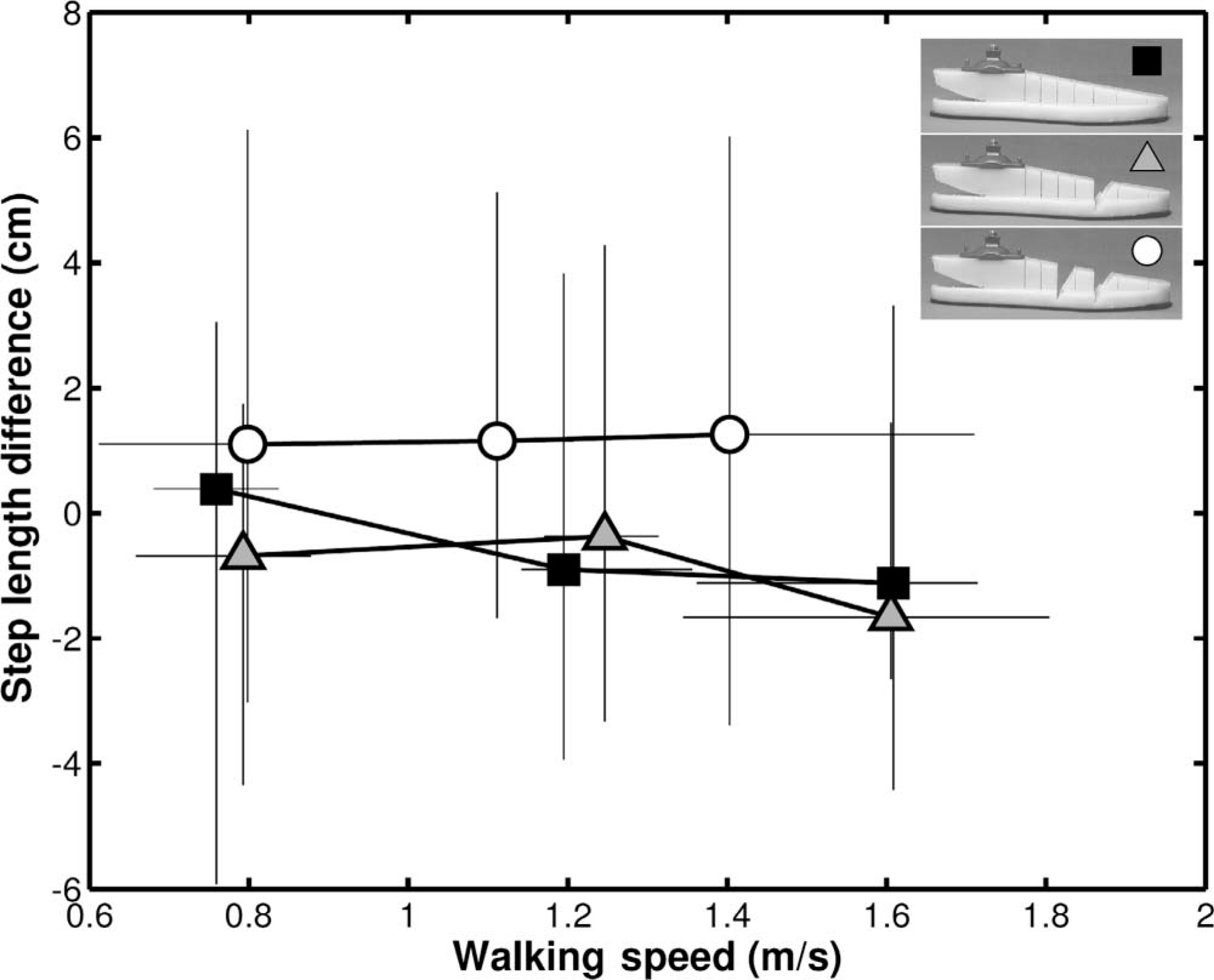
Median differences between step lengths on the prosthetic and sound sides versus median speeds for similar walking speed and arc length conditions for the 14 subjects in the experiment (black squares – LONG; grey triangles – MEDIUM; white circles – SHORT). Positive numbers indicate a longer step on the prosthetic side while negative numbers indicate a larger step on the sound side. The differences are greatest with the SHORT foot condition although variability is high. Lines extend from the first to third quartiles of each data set for both speed and step length differences.
First peaks of the vertical ground reaction forces (sound side – prosthetic side)
The mean vertical ground reaction forces (VGRF) are shown for one subject walking at his normal self-selected speed in Figure 7. This subject's data are representative of several of the subjects' VGRF patterns. There appears to be an earlier ‘drop-off’ in the force near the end of stance phase on the prosthetic side when feet with shorter roll-over shape arc lengths are used. Also, the first peaks of the VGRFs on the sound side seem to be larger when walking with feet having shorter roll-over shape arc lengths. The median differences between first peaks of the vertical ground reaction forces on the sound and prosthetic sides are shown as a function of walking speed in Figure 8. It appears that the differences are small and similar between foot conditions when walking at slow speeds (around 0.8 m/s) but that differences become more apparent at faster walking speeds (above 1.0 or 1.2 m/s). Statistical analyses suggested that the difference in sound and prosthetic side VGRF first peaks was significantly affected by walking speed (p < 0.001), arc length (p = 0.001), and the interaction between walking speed and arc length (p = 0.005). Pairwise comparisons showed significant differences in the first peak difference of the VGRFs for all walking speed comparisons (fast-normal: p = 0.002; fast-slow: p < 0.001; normal-slow: p = 0.001). Pairwise comparisons for arc length showed significant differences between the LONG and SHORT foot conditions (p = 0.006), between the LONG and MEDIUM conditions (p = 0.003), but not between MEDIUM and SHORT conditions (p = 0.377). Closer examination of the interaction term showed no significant difference in first peak VGRF asymmetry between the three arc length conditions when subjects walked at their slow self-selected walking speed (p > 0.999 for all comparisons). At normal self-selected speeds, the VGRF first peak differences were found to be statistically different when comparing LONG and MEDIUM foot conditions (p = 0.015), but not between LONG and SHORT foot conditions (p = 0.073) or between SHORT and MEDIUM foot conditions (p > 0.999). At fast speeds, the VGRF first peak differences were found to be statistically different between the LONG and MEDIUM foot conditions (p = 0.002), between the LONG and SHORT foot conditions (p < 0.001), but not between the MEDIUM and SHORT foot conditions (p = 0.278).
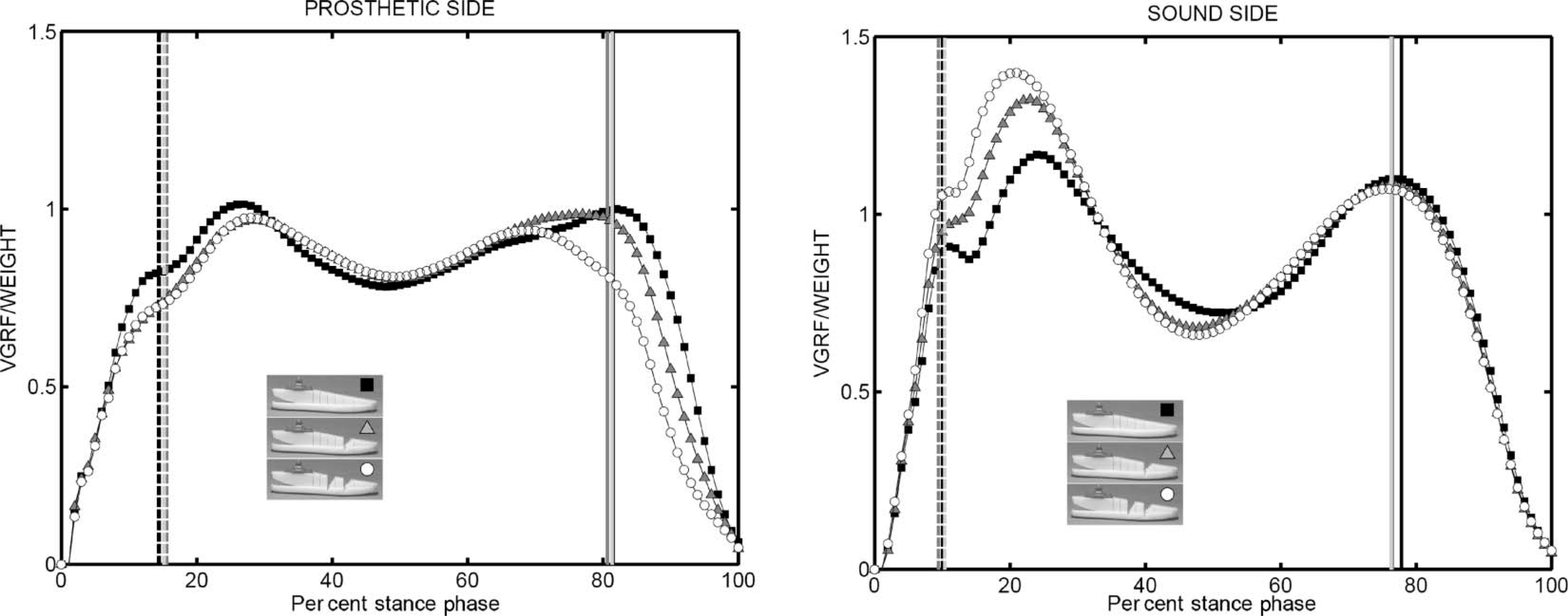
Vertical ground reaction forces (normalized by body weight) for the prosthetic side (left) and sound side (right) of one representative subject walking at his normal self-selected speed (black squares – LONG; grey triangles – MEDIUM; white circles – SHORT). The ground reaction force is reduced at late stance when feet with shortened roll-over shape arc lengths are used. The first peak of the vertical ground reaction force on the sound limb is subsequently increased as feet with shorter roll-over shape arc lengths are used. Vertical lines in the plots indicate times of opposite toe off and opposite heel contact (black – LONG, dark grey – MEDIUM, and light gray – SHORT; dashed lines – opposite toe off, solid lines – opposite heel contact).
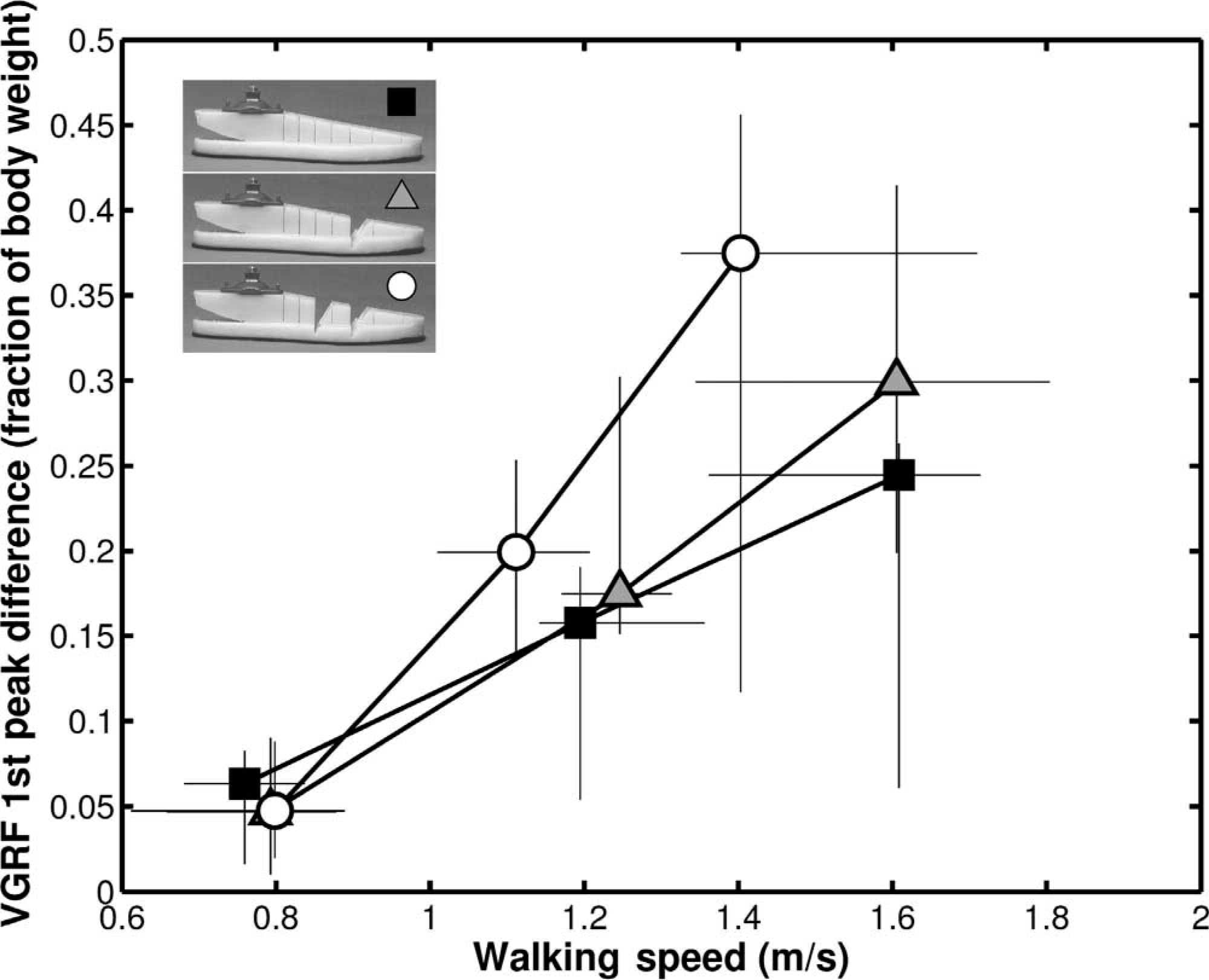
Median differences between the first peaks of the vertical ground reaction forces on the sound and prosthetic sides versus median speeds for similar walking speed and arc length conditions for the 14 subjects in the experiment (black squares – LONG; grey triangles – MEDIUM; white circles – SHORT). The differences are greatest with the SHORT foot condition although the difference increases with walking speed for all arc length conditions. Lines extend from the first to third quartiles of each data set for both speed and ground reaction force first peak differences.
Discussion
As hypothesized, the first peaks of the vertical ground reaction forces were significantly increased on the sound limb compared with those on the prosthetic limb when subjects walked using feet with shorter effective foot lengths. The other hypothesis, that step lengths would be reduced on the sound limb compared with the prosthetic limb when shorter effective foot length feet were used, was not supported by the statistical test although the significance level for this test (p = 0.062) was very close to the cutoff of p < 0.05.
The results of the experiment were variable between subjects. Some subjects had increased sound limb loading when walking with the shorter foot conditions but did not display changes in their sound limb step lengths. Other subjects took shorter steps with the sound limb compared to their steps on the prosthetic limb when walking with the shorter foot conditions and did not display large changes in the vertical ground reaction force peaks. The results of the study suggest that the forces are affected by roll-over shape arc length more consistently than the step lengths. It is possible that some of the subjects had been coached in therapy sessions to walk with symmetry, i.e., to try to maintain a similar step length between sides. If this is true, this behaviour may be detrimental to the sound limb, particularly when walking with prosthetic feet with short effective foot lengths, because of the increased loading that can be experienced on this limb.
The reduction in dorsiflexion moments on the prosthetic side compared with the sound side was expected due to the shortened forefoot lever arm imposed by the shorter foot conditions. This reduction was consistent for all research participants in the study. Participants experienced the highest symmetry in ankle dorsiflexion moments between sound and prosthetic sides when walking with the LONG foot condition (unmodified Shape&Roll prosthetic foot).
The increased loading on the sound limb compared with the prosthetic limb was also expected when using the feet with shorter effective foot lengths. However, the sound limb loading was still increased with all feet as speed increased. This observation, coupled with the data showing that the effective foot length ratios were similar between the prosthetic and sound sides for the LONG foot condition, suggests that effective foot length is not the only factor that describes the loading on the sound limb. Other factors such as inadequate energy returned from the feet during pre-swing may help to explain why an asymmetry in the vertical ground reaction force peaks still remains at higher walking speeds. An increase in the energy returned from the feet during this time may extend the unloading time, allowing more load to remain on the prosthetic foot for a longer period of time in pre-swing, and reduce sound and prosthetic VGRF peak differences.
Some limitations of this study include the fact that the person's current prosthetic foot and reason for amputation were not included as factors. Subjects may walk the fastest with and may prefer the foot condition in the study that most closely matches the EFLR of the foot currently used on their everyday prosthesis. Also, the reason for amputation is largely correlated with general health and affects walking speeds and general walking performance. In this study, walking speeds were not controlled and were freely selected by the participants. In general, the participants walked at slower self-selected fast speeds when walking with the SHORT foot condition compared to the LONG and MEDIUM foot conditions. However, the repeated measures ANOVA test does not examine the actual speeds used during walking. It uses only SLOW, NORMAL, and FAST as discrete categories for speed. A more closely controlled study could sort out groups dependent on their reason for amputation and the prosthetic foot they are currently using, and control the speeds and step lengths taken by subjects if the vertical ground reaction forces were the desired outputs. However, imposing too many constraints on walking performance may draw attention away from conditions that would be most natural to the participants and therefore most clinically relevant. Another limitation may have been the relatively short time that subjects had to acclimatize to each foot condition. This short time was chosen so that all conditions could be measured in one day without removing and replacing the motion analysis markers, eliminating errors due to marker placement and variability due to other influences that could affect the outcome of the study during long acclimation periods. However, a longer acclimatization time may produce different results that may be more meaningful for long time use of the devices. Lastly, the alignment of the prosthetic feet was not adjusted between conditions. In theory, the feet would feel the same from heel contact to the end of the roll-over shape when alignment is kept constant in the study. However, in practice a prosthetist may make forward adjustments and/or plantarflex a prosthetic foot with a shorter effective foot length to attempt to align its roll-over shape with the anterior portion of the ideal shape for a given person (Hansen et al. 2000, 2003). Adjustments in sagittal plane alignment may reduce the gait deviations seen in this study. However, they may also create other deviations related to early stance (heel contact to mid-stance). Further work could examine if alignment changes can be used to reduce sound limb loading in unilateral trans-tibial prosthesis users.
The Shape&Roll prosthetic foot is a useful tool for research because it can be easily altered to examine various aspects of prosthetic feet. The unmodified Shape&Roll foot had EFLR values that were similar to or slightly higher than those of the sound limb and modified versions were used to simulate prosthetic feet with shorter EFLR values. Other aspects of feet that were not examined in this study but that could be studied in future work include observing the effects of roll-over shape radius and stiffness properties on walking characteristics of lower limb prosthesis users. The radius can be chosen on a Shape&Roll foot by selective placement of the cuts in the forefoot and altering the thickness and the materials utilized in the foot's sole plate can change the foot's stiffness properties. The assumption that the Shape&Roll foot can simulate other prosthetic feet should be further examined.
Conclusions
The Shape&Roll prosthetic foot was used to examine the effect of roll-over shape arc length on the gait of unilateral trans-tibial prosthesis users. Participants experienced higher loads on their sound limbs when they walked at normal and fast speeds with feet having shortened roll-over shape arc lengths. This higher sound limb loading may be a result of a reduced maximum dorsiflexion moment on the prosthetic side near the time of sound limb contact, which causes a ‘drop-off’ effect and a more abrupt unloading of the body's weight from the prosthetic limb to the sound limb. Step lengths were somewhat reduced on the sound limb compared with the prosthetic limb when using the feet with the shortest roll-over shape arc lengths, although this trend was not found to be statistically significant. Other factors including energy return and roll-over shape radius should be examined, perhaps with the Shape&Roll prosthetic foot, to more fully understand their effects on gait of lower limb prosthesis users.
Footnotes
Acknowledgements
The authors would like to acknowledge the use of the VA Chicago Motion Analysis Research Laboratory of the Jesse Brown VA Medical Center, Chicago, Illinois. This work was funded by the National Institute on Disability and Rehabilitation Research (NIDRR) of the US Department of Education under grant no. H133E030030. The opinions contained in this publication are those of the grantee and do not necessarily reflect those of the Department of Education. The authors also recognize and express thanks to Sophie Lambla, Steven Steer, Rebecca Stine, and Sara Koehler for their assistance with this study.