
Abstract
This paper reports on a functional evaluation of prosthetic feet based on gait analysis. The aim is to analyse prosthetic feet behaviour under loads applied during gait in order to quantify user benefits for each foot. Ten traumatic amputees (six trans-tibial and four trans-femoral) were tested using their own prosthetic foot. An original protocol is presented to calculate the forefoot kinematics together with the overall body kinematics and ground reaction forces during gait. In this work, sagittal motion of the prosthetic ankle and the forefoot, time-distance parameters and ground reaction forces were examined. It is shown that an analysis of not only trans-tibial but also trans-femoral amputees provides an insight in the performance of prosthetic feet. Symmetry and prosthetic propulsive force were proved to be mainly dependant on amputation level. In contrast, the flexion of the prosthetic forefoot and several time-distance parameters are highly influenced by foot design. Correlations show influential of foot and ankle kinematics on other parameters. These results suggest that prosthetic foot efficiency depends simultaneously on foot design and gait style. The evaluation, proposed in this article, associated to clinical examination should help to achieve the best prosthetic foot match to a patient.
Introduction
Many prosthetic feet are now available for prosthetists in order to meet the patients' individual needs, but the prosthetic prescription remains difficult. Not only must the functional demand of the amputee be clearly identified but also the choice of prosthetic foot must be based on knowledge of behaviour of the foot during gait. This choice is often based on subjective criteria because of a lack of objective and quantitative methods.
Moreover feet designs are growing in complexity with the development of “energy-storing” feet. These feet are supposed to be capable of storing energy in the heel and the mid-foot during loading and releasing energy at push off (Wing and Hittenberger 1989). Consequently, as the cost of prosthetic feet increases, it is necessary to justify the use of such components. To evaluate the foot itself, mechanical tests can be used. For example, Postema et al. (1997) measured the hysteresis of 4 feet and Lehman et al. (1993) tested the stiffness and the natural frequency of 3 feet. Geil et al. (2000) even suggested an iterative method for viscoelastic modelling of prosthetic feet. These mechanical tests provide intrinsic feet characterization but they are not sufficient to evaluate prosthetic foot because of the variability of amputee gait schemes (Cortes et al. 1997; Van der Linden et al. 1999). Therefore, it appears essential to understand the behaviour of prosthetic feet during gait from a functional point of view in order to evaluate the user benefits for each foot.
Many studies have been carried out to compare different prosthetic feet using gait analysis. Among these, several focused on the evaluation of various feet (between 2 and 14) worn by trans-tibial amputees (Menard et al. 1992; Mizuno et al. 1992; Lehman et al. 1993; Arya et al. 1995; Snyder et al. 1995; Cortes et al. 1997; Postema et al. 1997) whereas only one study (Van der Linden et al. 1999) investigated the effects of 5 feet on the gait of 2 trans-femoral amputees. In these studies, biomechanical parameters are used. Arya et al. (1995), Menard and Murray (1989), Menard et al. (1992) and Mizuno et al (1992) studied ground reaction forces during gait to compare feet. Cortes et al. (1997) and Snyder et al. (1995) added the measurement of ankle, knee and hip kinematics. Finally, Ehara et al. (1993), Postema et al. (1997), Underwood et al. (2004), and Van der Linden et al. (1999) used these measurements to calculate joint moments or joint powers. For all these studies, each amputee was examined with various feet.
The aim of this study is to evaluate prosthetic feet worn by trans-tibial and trans-femoral amputees, each amputee being examined with his own foot. An original protocol is proposed to record fore-foot and ankle kinematics together with the overall body kinematics and ground reaction forces during gait. This work focuses on the kinematics of the prosthetic foot and the ankle and their relation with time-distance parameters and ground reaction forces. Gait parameters are investigated according to the amputation level and the type of prosthetic foot.
Material and methods
Subjects
Nine male amputees and one female amputee were considered during their clinical gait analysis examination. Among this group, six were trans-tibial and four were trans-femoral amputees. Mean age was 46.9 years, ranging from 33 – 70 years of age (Table I). They were all active walkers and none used assistive device. All subjects were amputated for traumatic reasons at least 5 years ago. A control group was composed of 35 non-amputated subjects, in good health, with normal gait, aged from 19 – 61 years (mean age 33.6 years).
Subjects and prosthetic feet characteristics.
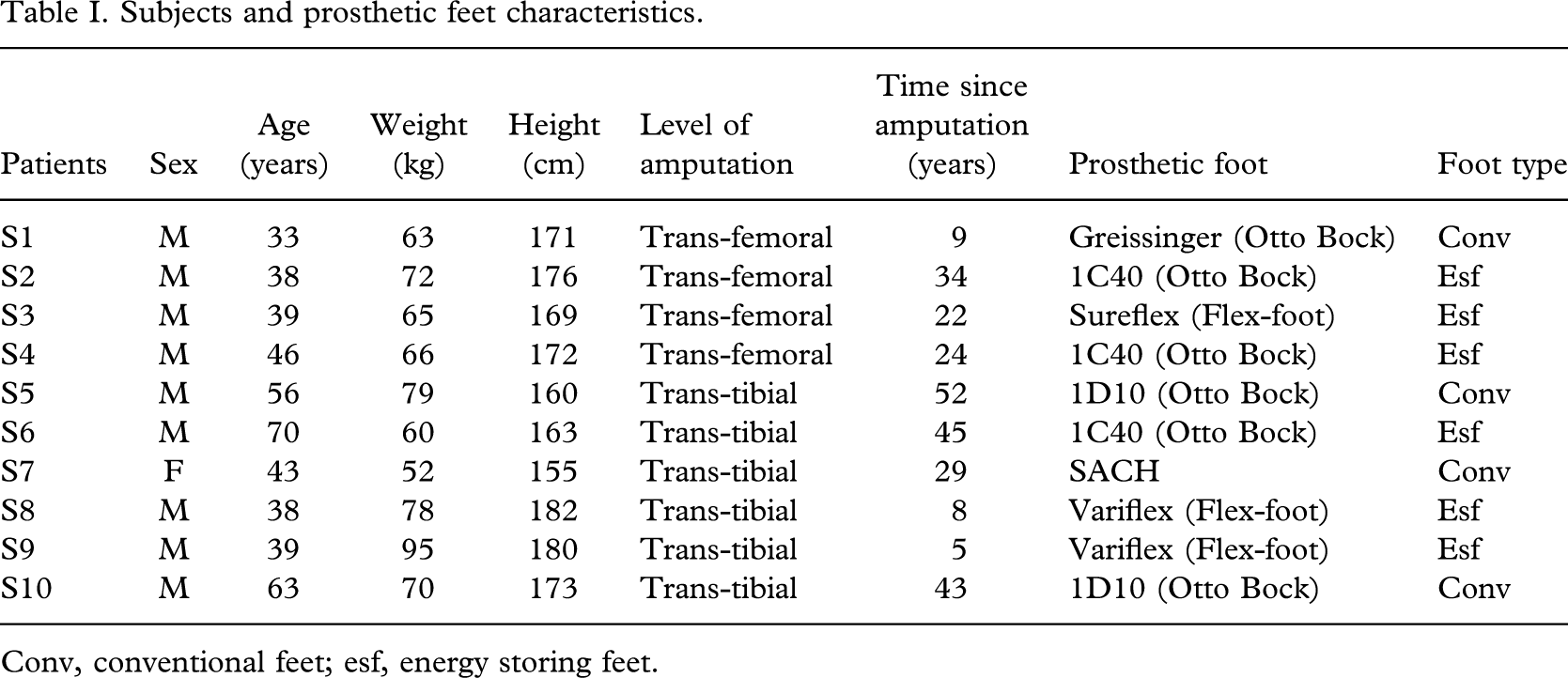
Conv, conventional feet; esf, energy storing feet.
Prosthetic feet
Each subject wore his own prosthetic foot. Six different prosthetic feet were used by the amputees in the group (Table I). Feet were classified according to their design. The conventional category includes all the feet that do not have a built-in carbon leaf system. The energy-storing feet are, in contrast, feet that are designed with a carbon leaf within a cosmetic cover. Four amputees (one trans-femoral and three trans-tibial) were fitted with conventional feet and six amputees (three trans-femoral and three trans-tibial) with energy-storing feet (Table II). Correct prosthesis alignment and fitting was ensured by a certified prosthetist.
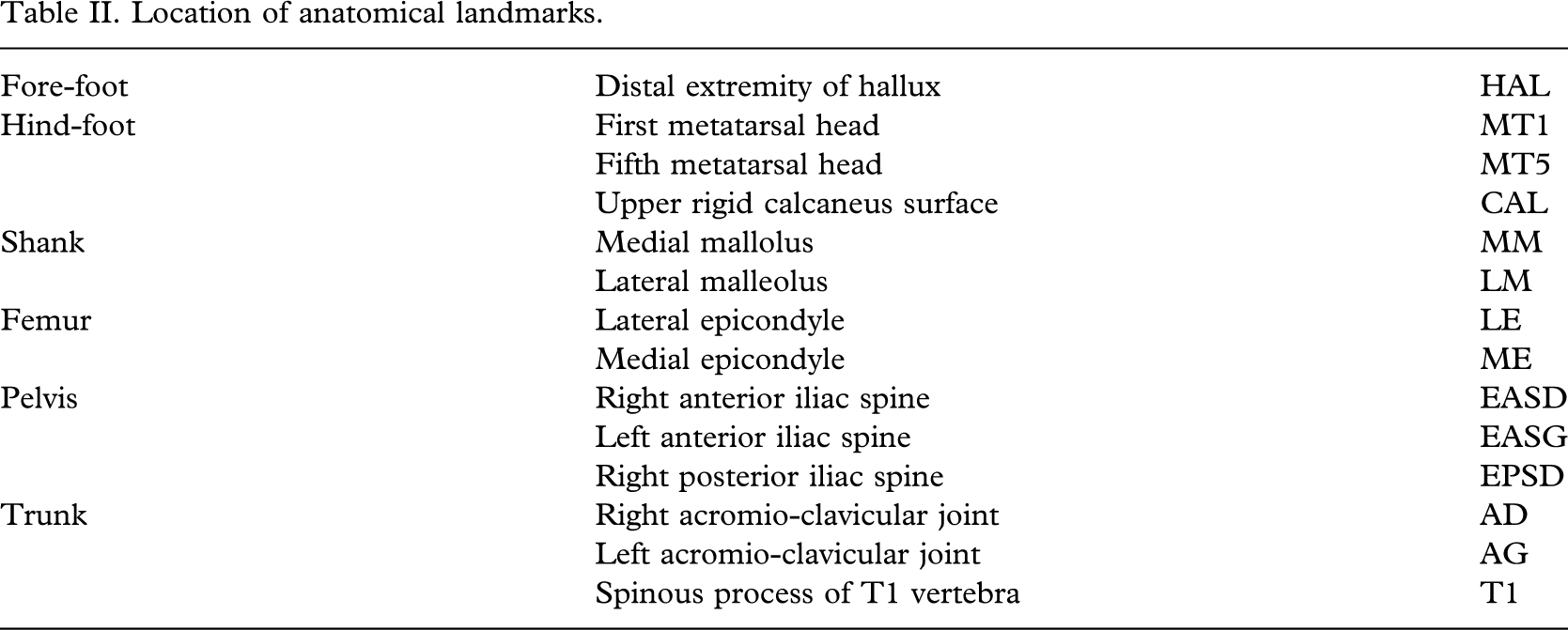
Location of anatomical landmarks.
Material
Experimental sessions took place in Gait Analysis Laboratory at the Centre d'Etudes et de Recherche sur l'Appareillage des Handicapés (CERAH) in Creteil. For each test session, bilateral kinematics were collected by means of an optoelectronic motion analysis system (Vicon® 524, Oxford Metrics Ltd, Oxford, UK) with a sampling frequency of 50 Hz. Simultaneously, ground reaction forces were recorded by two force plates (AMTI® Advanced Mechanical Technology, Inc, Massachussetts, OR6-5) which were built in level with the floor of the 10 m long walkway. Ground reaction forces were synchronized with kinematics data sampling.
The optoelectronic system was composed of six principal cameras, covering the overall measured volume (3 × 0.8 × 1.8 m) and six mini cameras, focusing on a space around the force plates, to accurately measure feet motion. These mini cameras have been specially designed for measurement in a small space and were placed directly on the floor. On the whole, 30 reflective markers were placed on body segments and prosthetic elements during gait. Sixteen additional markers were used to locate anatomical landmarks during a static measure but were removed during gait trials.
Experimental procedure
Each session contained three parts.
Part 1
Three questionnaires were used. The first one was intended for the patient and was used to obtain information about anthropomorphic characteristics, gait habits and possible pain or discomfort experienced during gait. The second questionnaire was used by the specialist medical doctor and covered medical information such as stump condition or joint mobility. Finally, the third questionnaire was filled by the prosthetist and provided a description of prosthetic components.
Part 2
The patient was tagged with 26 reflective markers (only one leg is marked). To begin with markers were placed on 14 anatomical landmarks of the trunk (3 markers), pelvis (3 markers), thigh (2 markers), shank (2 markers) and foot (4 markers) (Table II). Then rigid plates of 3 markers were fixed around thigh (3 markers), shank (3 markers) and foot (6 markers). The thigh and the shank devices have been developed by Marin et al. (1999). For the hind-foot, a soft shoe has been designed (Figure 1) that simultaneously allows the attachment of a plate to the calcaneus and variation of the height of the heel thus maintaining the prosthetic alignment for each patient. The shoe is soft enough to enable normal motion of the forefoot. At the forefoot, a plate was strapped to the second and third toes (Figure 1) for the sound side whereas markers were directly pasted on prosthetic foot.

Heel and toe devices.
The protocol began with two sets of static measurements during which the positions of all the markers were recorded successively for the right and the left lower limb. For the prosthetic side, the markers were placed to correspond to the sound side. These markers allow the study of the whole body. This present paper is focused on the foot but future studies will analyse the consequences of foot behaviour on other joints. The hip joint location was assessed using the protocol described by Leardini et al. (1999).
Part 3
In the last part of the session, the subject performed 10 walking trials at his/her self-selected speed. For this part of the procedure anatomical landmarks of thighs, shanks and feet were removed. Therefore, the patient is equipped with 30 markers (3 on the trunk, 3 on the pelvis, 3 on each tripod for the two thighs, the two shanks, the two feet and the two forefeet). A trial is considered as successful when each foot landed completely on a different force plate throughout its stance phase. This experimental procedure allows assessment of the kinematics of the entire body.
Data analysis
Data were processed using Matlab® (Mathworks,USA) software. Positions of the hip joints were calculated according to the method described by Cappozzo (1984) and validated by Leardini et al. (1999).
The local axis system was defined for each segment and described by Bonnet (Bonnet 2004). The orientation of the axis systems are in agreement with the ISB Committee for Standardization (Wu and Cavanagh 1995).
The method used to calculate joint angles during experimental trials was described by Marin et al. (1999).
The data obtained were averaged for the 10 walking trials of each subject. A set of parameters was calculated concerning time-distance data, specific points on the kinematic and ground reaction force graphs and their occurrence in percentage of gait cycle. Force data were normalized by body weight.
The ratio expressed in percent between the prosthetic stance and sound stance durations was also studied as an estimation of the symmetry of gait.
Time-distance parameters were defined as follows:
Amputated double support corresponds to the period between the beginning of stance on prosthetic side and the end of stance on sound side.
Amputated step length is calculated as the distance between the heel of the amputated limb position at heel strike and the heel of the sound limb position at heel strike.
To lead the present study, some parameters were selected in order to compare feet. They can be classified in two groups:
Sagittal prosthetic fore-foot and ankle kinematics which are used to quantify foot behaviour during gait.
Ground reaction forces and time-distance parameters which are used to evaluate the overall gait efficiency.
The parameters used are detailed in Figure 2.
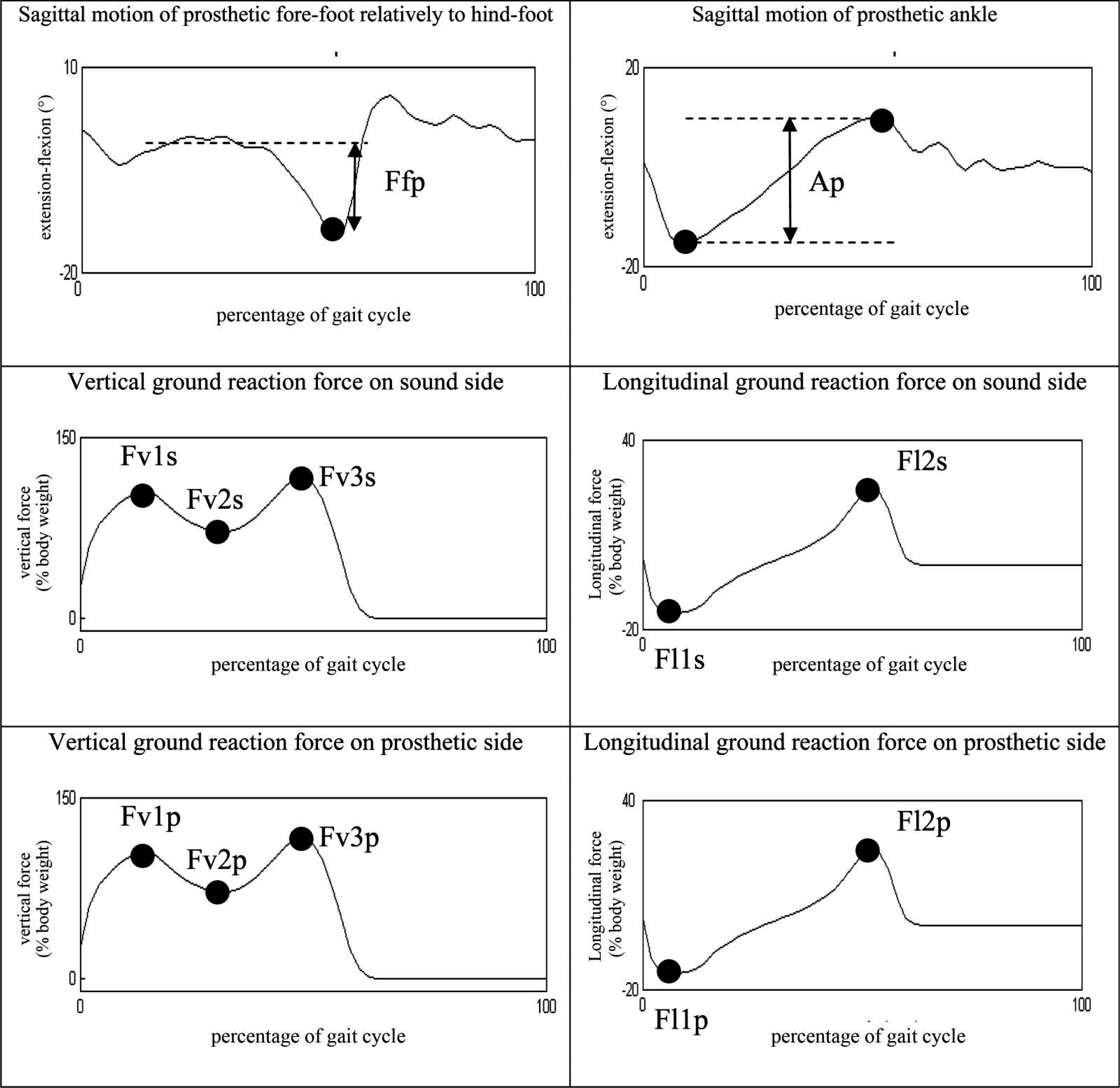
Kinematic and kinetic parameters.
Statistical analysis
Significant differences between parameters according to the level of amputation and the foot type were determined by analysis of variance (ANOVA). Level of significance was set at p = 0.05. Due to the sample's restricted size, the Spearman non-parametric test was used to establish correlation between parameters for the whole group and for the restricted group of patients wearing energy-storing feet.
Results
ANOVA
The results of ANOVA enabled the parameters to be classified. Some parameters are mostly dependant on foot type. Table III summarizes the results obtained for this group of parameters.
Mean and standard deviation of parameters according to foot type.
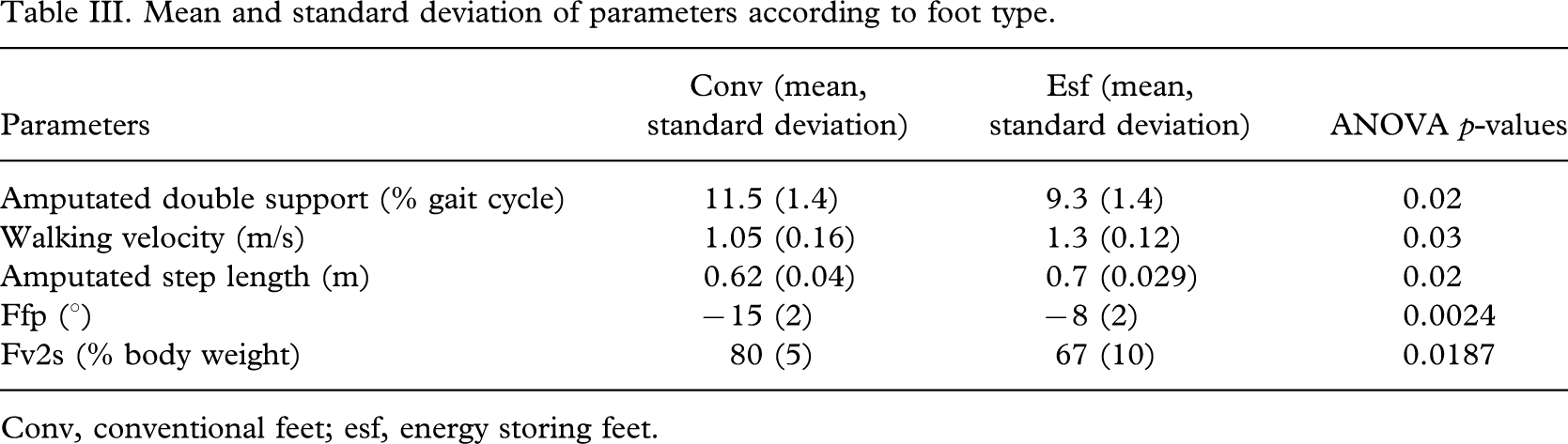
Conv, conventional feet; esf, energy storing feet.
Most of the time-distance parameters of the amputated side are influenced by foot type. Mean double support duration on amputated side is increased for patients fitted with conventional feet. It was noted that walking velocity and amputated step length are greater for the group of patients equipped with energy storing feet.
A significant difference is observed for the maximum angle of fore-foot relative to hind-foot according to foot types. The graphs of prosthetic fore-foot angles for the two types of feet and for a control group are shown on Figure 3. For the control group, the mean maximum toe extension mean is 35° (standard deviation 8°).
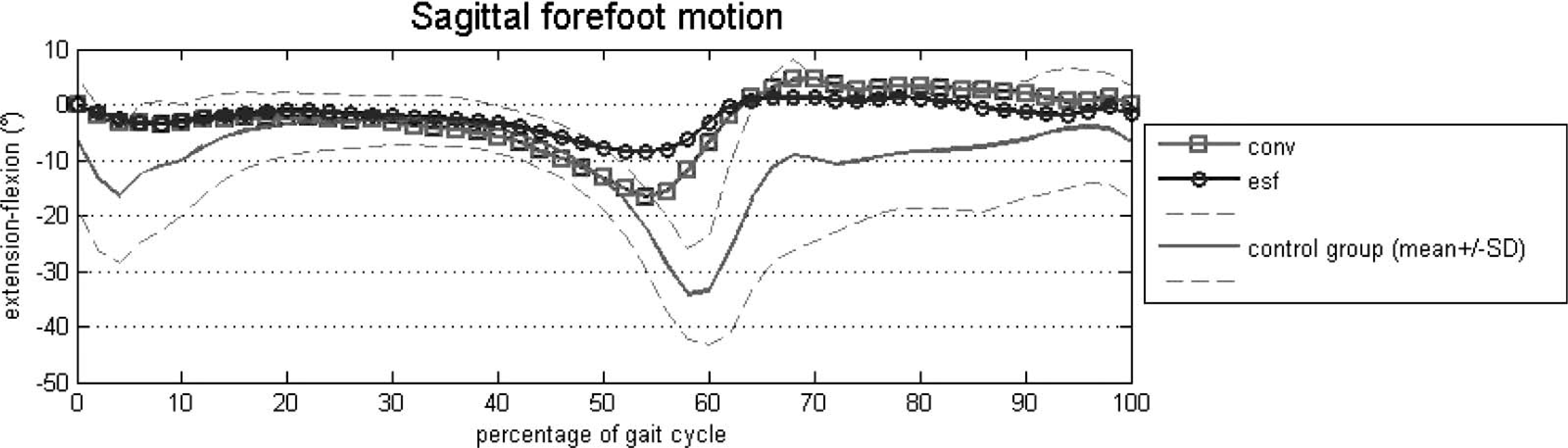
Mean sagittal motion of prosthetic forefoot for amputees wearing conventional feet (conv) and for amputees wearing energy-storing feet (esf) compared with sagittal motion of forefoot for the control group.
The mean of the parameter Fv2s (local minimum of vertical ground reaction force on the sound side) is statistically lower for patients wearing conventional feet (80% of body weight) compared to patients wearing energy-storing feet (67% of body weight).
A second group of parameters is highly influenced by amputation level. The second peak of longitudinal ground reaction force is often named the propulsive force. This propulsive force is significantly greater (p = 0.0015) on amputated side for trans-tibial patients (mean: 16% of body weight, SD: 1% of body weight) than for trans-femoral patients (mean: 9% of body weight, SD: 3% of body weight). Symmetry is significantly (p = 0.05) better for trans-tibial patients (mean: 99%, SD 4%) than for trans-femoral patients (mean: 94%, SD: 2%). All other parameters studied were not proved to be significantly dependant on foot type or amputation level.
Correlations
Correlations were searched for between the prosthetic foot and ankle kinematic parameters and time-distance parameters, on the one hand, and the ground reaction forces (on the amputated and sound sides), on the other hand. This research was first of all conducted on the whole group of amputees in order to determine if the kinematic characteristics of the two types of feet have functional consequences on the overall quality of gait or on force transmission. It was then conducted on the group of patients wearing energy-storing feet. These correlations give an insight in the relations that exist between the particular motion of energy-storing feet and the behaviour of sound side or the gait dynamism.
Table IV shows significant Spearman coefficients obtained on the whole group. Significant correlations were identified for prosthetic foot parameters while none was found for prosthetic ankle parameters. For the whole group, relationships are shown between fore-foot kinematics and time-distance parameters. Walking velocity and amputated step length increases when maximal forefoot flexion of the prosthetic foot (Ffp) increases. As Ffp has a negative value (flexion of forefoot is negative), it means that velocity and step length increase when the maximum angle value of fore-foot relative to hind-foot decreases. For the amputated double support duration the opposite is true. The amputated double support duration is prolonged when the maximum angle value increases.
Spearman coefficient of correlation for the whole group of amputees.

Table V shows the significant correlations found in the energy-storing feet group. A strong correlation is found between the prosthetic ankle range of motion and walking velocity. A correlation exists between the fore-foot flexion Ffp and first peak of anteroposterior force on sound side Fl1s (Spearman coefficient = 0.9).
Spearman coefficient of correlation for energy storing feet group.

Discussion
The purpose of this study was to analyse the influence of prosthetic foot choice on traumatic trans-tibial and trans-femoral amputee gait.
Studying the two major levels of amputation simultaneously allows the evaluation of foot efficiency for very different gaits. Some anterior studies investigated trans-tibial amputee gait (Winter 1988), whereas others considered trans-femoral amputees only (Sjödahl et al. 2002). Comparing their results, huge differences can be seen in the biomechanical parameters, suggesting that gait patterns are significantly different between trans-tibial and trans-femoral amputees. The advantage of the present study is to highlight main influential of gait style on gait symmetry and prosthetic propulsive force. Previous studies gave results of stance phase duration for trans-tibial (Powers et al. 1998) and trans-femoral amputees (Boonstra et al. 1994) but methods were different and comparison is difficult. Here, symmetry was proved to be directly dependant on amputation level. Moreover, the influence of foot type is negligible on this parameter. Propulsive force on amputated side was also determined by amputation level. This finding confirms the hypothesis of Arya et al. 1995 who suggested that propulsive force is mainly influenced by walking pattern rather than by prosthesis. Their conclusion was limited since they could not quantify gait style on the group of trans-tibial amputees. Cortes et al. (1997) also showed that prosthetic propulsive force is more influenced by cadence rather than prosthetic foot type. This result explains why Postema et al. (1997) did not observe any significant difference in the propulsive force of trans-tibial amputees wearing various feet.
On the contrary, some parameters were not sensitive to amputation level but highly influenced by foot type. Foot motion is assumed to be very different for conventional feet compared to energy-storing feet. To assess accurate foot motion, the protocol used in the present work proposes a new view of the foot as two articulated rigid bodies corresponding to the fore-foot (in front of the metatarsal head area) and the hind-foot (behind the metatarsal head area). Whereas previous studies (Lehman et al. 1993; Snyder et al. 1995; Postema et al. 1997) were limited to ankle motion analysis, this present work enables the calculation of fore-foot motion. Moreover, the use of a heel device improves also the calculation of ankle motion. Indeed, in anterior studies (Snyder et al. 1995; Van der Linden et al. 1999) the foot is located by markers placed on the shoe. This method does not consider the foot deformations at the mid-foot during gait which are not negligible. Attaching a device to the heel allows the calculation of the relative motion between shank and heel which can be considered as rigid bodies. Finally, this method differentiates the ankle motion due to the deformation between rigid part of shank and heel and the fore-foot motion corresponding to the deformation between heel and metatarsal head area.
With that in mind, the sagittal ankle range of motion appears to be not significantly dependant on foot type. This finding is in apparent contradiction with results of previous studies which report an increased total ankle range of motion with energy-storing feet (Lehman et al. 1993; Postema et al. 1997; Hafner et al. 2002). This discrepancy can be explained since foot deformations between the heel and metatarsal heads are taken into account in the calculation of ankle motion by these authors. The design of energy-storing feet obviously permits a large movement of the mid-part of the foot due to the carbon leaf flexibility (Wing and Hittenberger 1989).
On the contrary, it has been found that the energy-storing fore-foot flexes significantly less than the conventional fore-foot during late stance phase. Mechanical tests (Lehman et al. 1993; Geil 2001) show a higher stiffness of conventional feet compared to energy-storing feet. However, these mechanical tests were carried out in quasi-static conditions and the calculation used the overall deformation of the foot. During gait, dynamic forces and moments are applied to the fore-foot that can lead the conventional fore-foot to flex a great deal because there is no structural element under the cosmetic cover at the front end of the foot.
The amputated step length, walking velocity, double support on amputated side and local minimum of vertical force on sound side are dependant on foot type. The decrease of vertical load applied on the intact limb at mid-stance with energy-storing feet demonstrates the efficiency of propulsive action of these feet. The progress of the sound stance phase is conditioned by the prosthetic late stance phase and prosthetic swing phase. A better propulsive action of foot has repercussions on the centre of mass displacement during swing phase and is expressed by a decrease of load applied on the sound side during the single support phase. Simultaneously, an overall alteration of gait is observed with conventional feet expressed as a decrease of velocity, an increase of double support on the amputated side and a greater asymmetry of step lengths.
Moreover, correlations are found between these parameters and Ffp, which involves that time-distance parameters are directly linked to foot kinematic behaviour. These correlations suggested that the stiffer extremity of energy-storing feet allows a prolongation of prosthetic step preventing collapse on the sound side in prosthetic late stance phase. Studying the more restricted group of amputees wearing energy-storing feet, other correlations were found. Walking velocity and prosthetic ankle range of motion are highly correlated. This finding is consistent with the suggestion by Hafner et al. (2002) who supposed that improvements concerning time-distance parameters are due to the properties of the energy-storing foot's flexible keel during the mid-stance phase.
The strong correlation between prosthetic ankle motion and velocity is proof that a less stiff ankle keel allows a better progression of the whole body. Moreover, the degree of flexion of fore-foot relatively to hind-foot is correlated with the magnitude of the maximal anteroposterior force at sound heel strike (Fl1s). A stiffer prosthetic fore-foot prevents a too-high anteroposterior first peak of force on the sound side. Indeed, a stiffer fore-foot allows a better control of weight transmission in late stance phase.
Conclusion
An original protocol was proposed for assessment of prosthetic foot performance. The number of subjects was limited, so the preliminary results should be confirmed through a more extensive study. With that in mind, main findings were as follows:
Symmetry and prosthetic propulsive force are determined by gait pattern rather than by foot type.
Propulsive action of energy-storing feet is shown by an improvement of body dynamic displacement during mid-stance on the sound side.
An overall improvement of gait with regards velocity, step length and double support time is observed with energy-storing feet and is due to a decrease of maximum angle of the fore-foot relative to the hind-foot avoiding collapse in the prosthetic late stance phase.
With energy-storing feet, velocity is increased by a larger range of motion of the prosthetic ankle and a decrease of fore-foot flexion allows reducing the peak of anteroposterior force on sound side.
To sum up, the present study succeeds in quantifying accurate motions of prosthetic ankle and fore-foot and their consequences on the overall gait parameters. Thus, through this study, the understanding of energy-storing foot behaviour is improved. Two amputation levels were investigated to assess simultaneously gait pattern influential. A clinical use of this protocol associated with muscular capability evaluation will be a help to determine adequacy of prosthetic foot provision to a patient.
Footnotes
Acknowledgements
The authors wish to thank the participants in this study, the prosthetists of the CERAH, D. Azoulay and C. Cazorla, for their help during experiments and Protéor for the financial support to make this study possible.