
Abstract
In order to realize more natural and various motions like humans, humanlike musculoskeletal tendon-driven humanoids have been studied. Especially, it is very challenging to design musculoskeletal body structure which consists of complicated bones, redundant powerful and flexible muscles, and large number of distributed sensors. In addition, it is very challenging to reveal humanlike intelligence to manage these complicated musculoskeletal body structure. This paper sums up life-sized musculoskeletal humanoids Kenta, Kotaro, Kenzoh and Kenshiro which we have developed so far, and describes key technologies to develop and control these robots.
1. Introduction
What should we study on as next robot researches? In this case, a musculoskeletal robot represented by humanoids is a good target when considering the frontier to which the evolution of intelligent robot research. A musculoskeletal humanoid is the robot which has following characteristics:
It has fullbody flexibility based on its spine structure.
It has redundant muscles which can drive complicated joint structure.
It can easily embed elastic elements for force control to muscle itself.
It can easily embed stiffness adjustment elements to muscle itself.
On the other hand, it is difficult to realize intelligence to manage fullbody motion and behavior due to its complexity of body structures and a large number of joint DOFs and actuators to control. Such a research can be valuable in evolving the development of new research on humanoid intelligence. From the the experimental study on theoretical structure of intelligence, we researchers have to reveal human intelligence how to manage complex musculoskeletal body with many bones, organs and muscles which is covered by flexible skins like human body. Needless to say, we human beings not only move our musculoskeletal body, but also live in social daily life by more high-dimensional intellectual behaviors, such as recognizing environments, making tools, using them dexterously and so on.
For musculoskeleltal humanoid researches, it is also necessary not only to reveal such a musculoskeleltal intelligence but also to prepare how to use these intelligence to our social life in near future. It is very important to prepare basic intelligent robot research for human daily assistant behaviors by using conventional type humanoid with not musculoskeletal body. To promote musculoskeleltal humanoid researches, it is also important to build developing environments which can inherit results for common type of humanoids, such as HRP2 [1], PR2 [2] and so on. We expect that a musculoskeletal humanoid research becomes the scholarship to learn human musculoskeletal structure and function, the intelligent study how to manage its complex body and the intelligent robot platform for life-assistive humanoid research thanks to its body characteristics. And also we hope this musculoskeletal research area will evolve intelligent robot technology as the research frontier. Based on this vision, this paper describes life-sized tendon-driven fullbody musculoskeletal humanoid researches we have studied so far, from the body design methodology to realization of fullbody behavior.
2. Importance of humanoid flexibility in fullbody motion
Whole body behaviors are the behaviors where the robot is easily subject to impact from whole body inertia and contact with environments due to its fast and flexible body motion. We developed small humanoid robots whose brain computer, which is wirelessly connected to the robot body, is outside of its body. As shown in Figure 1, we conducted various behavior achievements and evaluations by using these small robots [3]. Many behaviors were achieved, such as locomotion with arms, biped walking, carrying objects, swinging based on sensing its body oscillation, iron bar motion, monkey bars motion, walking and kicking, rolling-over, using a mobile base, and so on [4]. These small humanoids weigh light because its body consists of low stiffness and light structures and it has no computer. Thanks to light weight body, a physical damage or wire cable disconnection rarely occur even in conflict with the environment. In these robots, their rotary joints consist of multi-reduction gear and motor modules. The gear structure takes impact torque of its joint. It has the advantage that the joint impact becomes small and indestructible due to the compact and lightweight body.
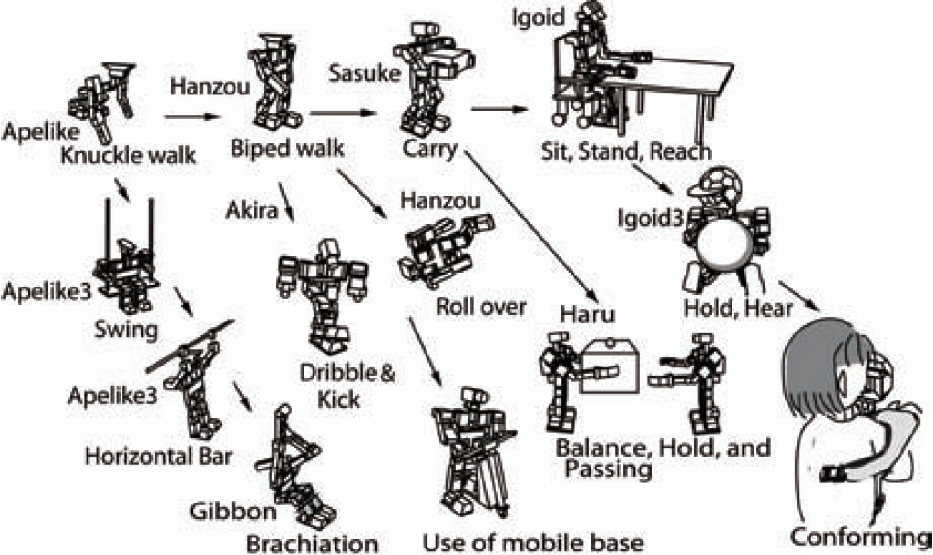
Evolution of small humanoid fullbody action
However, the rolling over is difficult by the robot which has a rigid trunk with broad shoulders. Rolling over is the action which is need to bend and twist the trunk. And also the motion shaking the whole body, such as climbing a ladder or exercising an iron bar, requires pliant trunk by flexible spine structures. In order to use a mobile base, a robot needs to grab handles with two hands, dynamically deal with closed-link structure from arms to legs and strongly kick the ground by its legs. This motion also requires whole body flexibility. In sitting in a chair and picking a object on the ground, redundant joint degree of freedoms are useful as shown in Figure 2. In whole body behaviors, the robot body needs flexibility which enables to absorb impacts by contact with environments while shifting of the weight of the body, and also mechanism which enables to achieve fast and agile motion. From this standpoints, it is effective to adopt musculoskeletal body structure, which can easily implement a spine structure and flexible joint structures. We expect that these musculoskeletal robot can evolve the robotics researches to new stages, such as realization of more humanlike dynamic fullbody behaviors.

Example of a musculoskeletal humanoid's motion using its spine
3. Body design concept of musculoskeletal humanoids
This section describes the design concept of three life-sized musculoskeletal humanoids which we have developed so far. Figure 3 shows appearances, joint arrangements and muscle arrangements of these robots. Table 1 shows height, weight and number of muscles of each humanoid.
Specifications of tendon robots developed

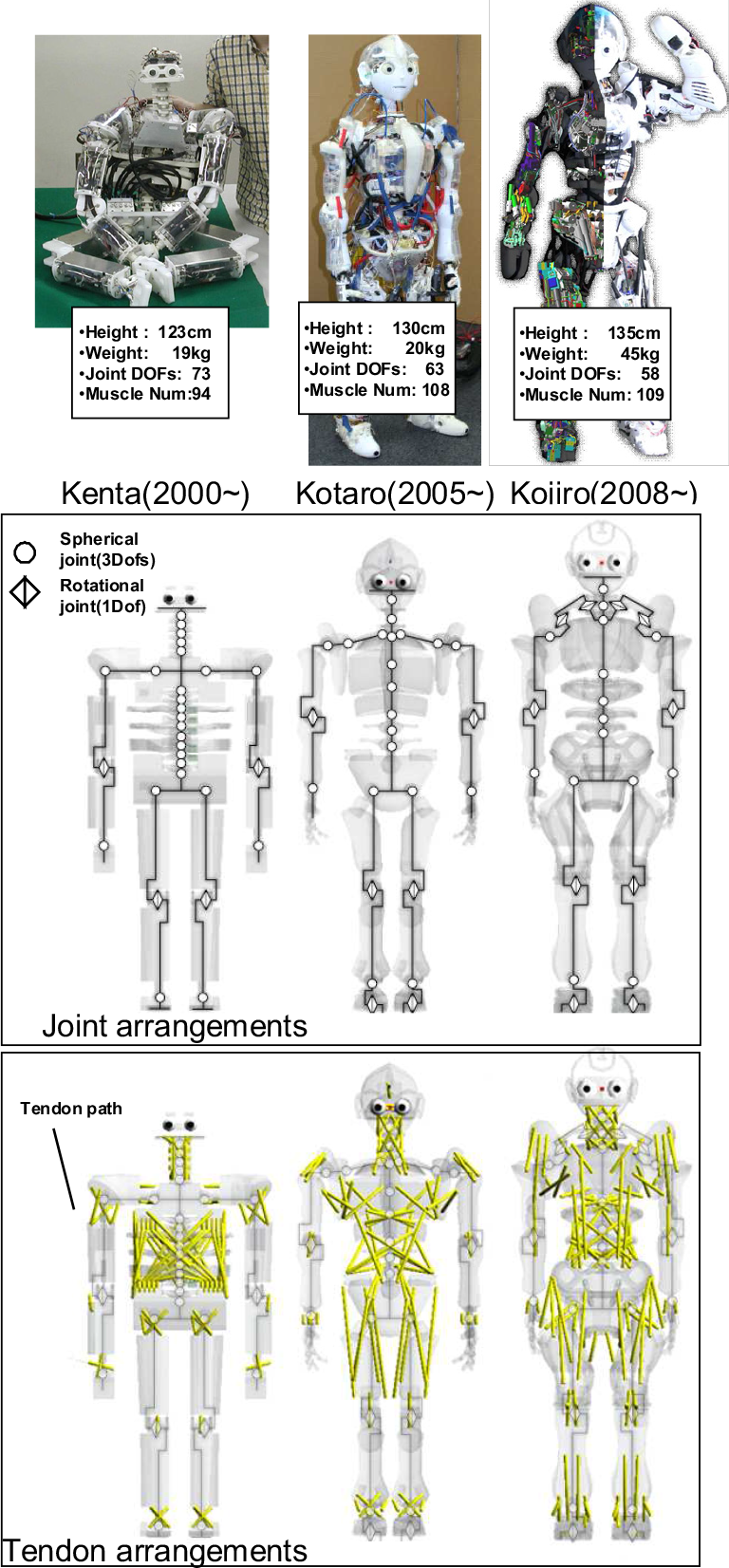
Joints and tendon arrangements of musculoskeletal humanoids developed
3.1. Fully tendon-driven musculoskeletal humanoid with spine: Kenta
We developed “Kenta” [5], which was developed to aim implementation of more humanlike body structure based on the former small humanoid “Cla” with spine joints [6]. The big characteristics of Kenta is a complicated trunk structure with super multi-DOFs vartebrae, which consists of 10 articulated 3 DOFs joint (i.e. 30 DOFs) and a large number of redundant 40 muscles to drive its vartebrae, as shown in Figure 4. Kenta's vartebra not a simple ball-socket joint structure, but a complex structure. It imitates a human vartebrae and has a lock mechanism, which corresponds to human vartebra projection for prevention of excessive movement. This mechanism prevents its spine structure from bending at the position of one vartebra. These joint structure with complicated shape was newly made of molded plastic resin by Selective Laser Sintering (SLS) method, which is a kind of a rapid prototyping molding, not of conventional engineering plastic or metal by cutting work. We have implemented humanlike complex bone structures of our musculoskeletal humanoids since Kenta until Kenshiro (in section 5) by this SLS rapid prototyping.

Accumulation of fixed muscles
In addition, Kenta has a neck structure with 5 articulated cervical vertebrae driven by 6 tendons, and also its all joints of its arms and legs are driven by tendons. This robot is the first life-sized fully tendon-driven musculoskeletal humanoid which was developed at our lablatory. On the other hand, compared to its complex torso, its joint DOFs arrangement and tendon arrangement are simplistically implemented. Kenta has a lot of room for improvement to achieve more humanlike structures.
3.2. Reinforceable musculoskeletal humanoid: Kotaro
We developed “Kotaro” [7], which was improved in the joint DOFs arrangement and structures of its whole body, compared with previous humanoid Kenta. The basic actuation system of Kotaro is the same as one of Kenta, which adopts tendon driven system with winding pulley rotated by DC 4.5W motor. Inspite of less number of spine joints (i.e. 5 articulated spherical joints) than Kenta's spine joints, Kotaro has a compound shoulder structures consisting of a collarbone and a scapula. As a result, it can humanlike upperbody natural movement thanks to humanlike arm joint DOFs arrangement, such as its shoulder [8]. In addition, Kotaro can easily add and modify its tendon arrangements by its slim bone structure and muscle modules with smooth round shapes as shown in Figure 5. Thanks to this design approach, we can test and search various tendon arranemgents of Kotaro after the robot actual implementation. We call this concpet “reinforceable musculoskeletal humaonid”, which was proposed in [9]. This concpet is important in order to reduce (i.e. simplify) number of muscles for actual implementation to realize humanlike musculoskeletal humanoids. And also all bone parts of Kotaro are made of nilon resin by rapid prototyping method (SLS), which is used in Kenta's spine structure. Kotaro enables to implement more muscle actuators and more similar tendon arrangements than Kenta, because we can freely design more complex bone shapes thanks to using rapid prototyping.

Reinforceable musculo-skeletal humanoid Kotaro
In the legs, Kotaro has as almost twice muscles as Kenta and also Kotaro adopts a DC 20 [W] motor 1 as an actuator of antigravity muscles, which needs more power than others. Thanks to this improvement of actuation power, Kotaro can somehow keep standing [10], which Kenta never can do. However, it is difficult to achieve behaviors which needs enough legs power, such as standing up, squwatting, walking and so on. And also in the arms, Kotaro has a larger joint movable range than Kenta thanks to compound shoulder mechanism, however, it cannot put its hand up due to power lacking.
3.3. Highpower musculoskeletal humaonid: Kojiro
We developed “Kojiro” [11], which has high-power actuation system, in order to solve lacking of joint power in the previous musculoskeleltal humanoid Kenta and Kotaro. The actuation system can instantly generate high power to the limitation of AC 40 [W] motor based on thermal control of motor's inner coil [12]. Kojiro adopts the new design method [13], which enables to embed many actuators and achieve high mechanical strength as shown in Figure 6. Thanks to this design approach, Kojiro legs can embed 44 actuators 2 , which is enough strong to conduct fullbody motion such as walking. Figure 7 shows Kojiro's complex leg structure with many actuators and control boards.
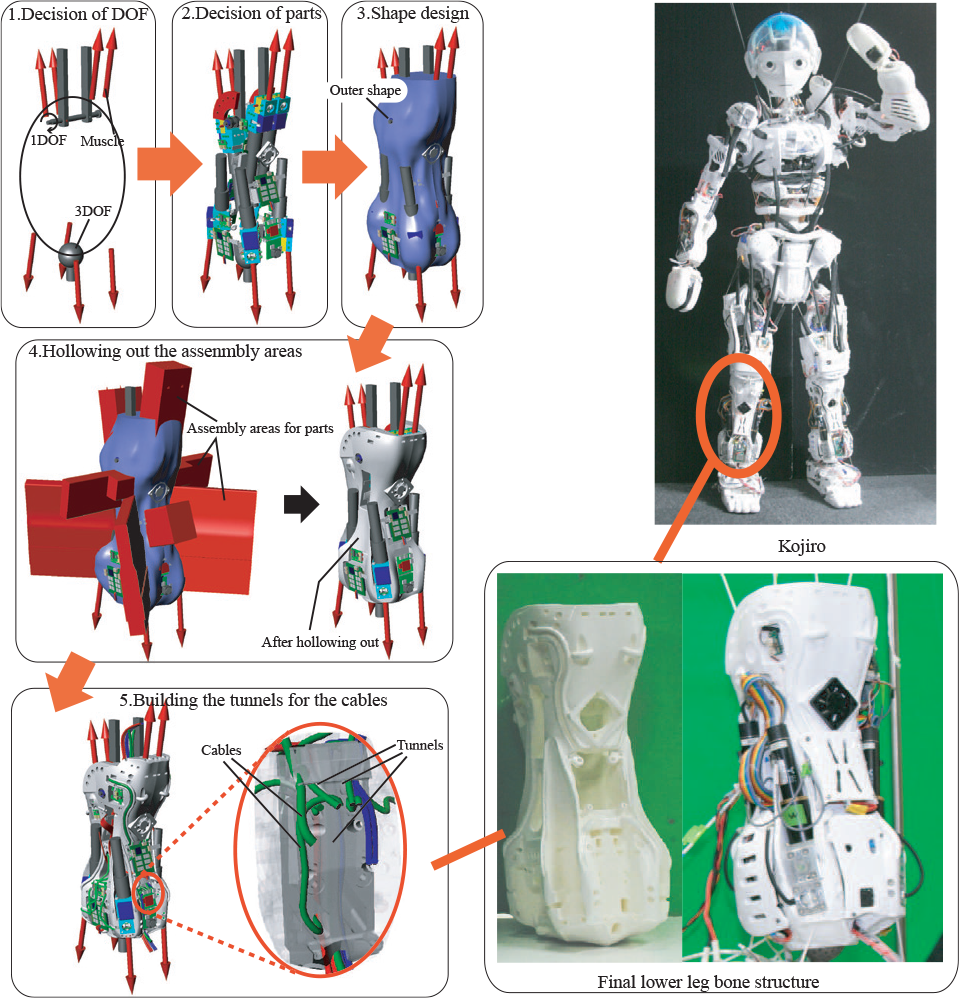
Design method of Kojiro's skeleton (a shank bone)

The lower body arrangement of Kojiro
And also Kojiro adopts newly spherical chest shoulder joint mechanism [14], which enables to move smooth scapula with less friction than a conventional scapula structure. In addition, Kojiro's wrist joint can absorb impact shock when it hits a nail, by embedding a variable joint stiffness mechanism. This mechanism is implemented by putting nonlinear spring element in antagonistic tendons around its wrist.
3.4. Musculoskeletal humanoid driven by mechanically compliant tendons: Kenzoh
In order to let musculoskeletal humanoids do more dynamic motions with some complex contact to environments like sports, we developed musculoskeletal humanoid “Kenzoh” (Figure 8) with mechanically compliant joint.

Musculo-skeletal humanoid “Kenzoh”
This robot can absorb impact shocks by using its joint softness based on mechanical stiffness adjustment muscle modules, which is called nonlinear spring tension unit (NST) like in Figure 9. If robot's joint is adjusted as low stiffness by NST, it can be adapted against suddenly collision with environments without no joint feedback control, because low joint stiffness is mechanically achieved by NST units. Of course, low joint stiffness can be achieved by joint feedback control by joint torque sensor [15] (or tension sensor in case of tendon robots).

Mechanism of non-linear spring tension unit (NST)
However, it is difficult to achieve enough fast response to impulse force, and also it does not work by some failure of a torque sensor, which often is fragile. Therefore, in order to develop adaptive humanoids with environment, robot's joints should be designed to control its own joint stiffness mechanically.
One of most important Kenzoh characteristics is that Kenzoh's all muscles have NST units. In order to embed more than 80 number of NST units within Kenzoh's limited body space, Kenzoh adopts two types of NST unit developed by ourselves. One is the integration type with actuator unit parts as shown in Figure 10. Advantage of this NST unit is to utilize effectively motor shaft space as spring and guided pulley of NST units, which often becomes dead space in previous musculoskeletal humanoids we developed. In Kenzoh, the integration NST units are mainly used in a chest bone, bladebones and upperarms, which have enough spaces. The other NST is the rotary NST unit as shown in Figure 11. Advantage of this NST unit is to put it anywhere through its tendon path, which enables to widen freedom of robot design. It is very useful at designing a complicated structures of Kenzoh which has many elements. And also this rotary NST unit can achieve higher stiffness than other NST mechanisms [16]. In Kenzoh, the rotary NST units are mainly used in a spine vertebrae, which have less spaces.

Integration NST unit with actuator muscle system

Rotary NST unit mechanism
4. Achievement of musculoskeletal humanoids behavior
Researches of achievement of musculoskeletal robots behavior have been studied based on mainly two methodologies. The one is by controlling its joints based on goal joint angle trajectory calculated like conventional axis-driven robots. The other is by learning and searching how to move its own complicated body itself. In the case of controlling joint angle, tendon length trajectory is converted from aimed joint angle trajectory by using conversion methodology as we discuss later, and each tendon length is controlled based on calculated trajectory data as shown in Figure 12. However, this method has the problem that precise joint control is difficult due to elongation of tendon wires and the error of tendon paths in the geometric model which is used in ‘joint angle – tendon length’ conversion process. Therefore, in the case which needs accuracy of joint angles or end effector position, sensor feedback control is necessary based on sensors which can detect its joint angle or hand positions as shown in Figure 13.

Upper layer of motion controller for musculoskeletal humanoids
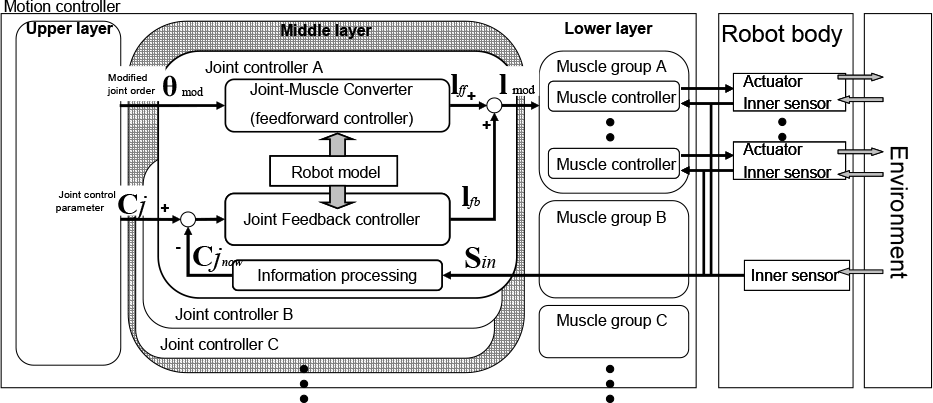
Middle layer of motion controller for musculoskeletal humanoids
From these background, learning and searching method seems to be more fit for achievement of musculoskeletal humanoids behaviors rather than conventional precise joint control method, however, there are no established method in these robot research field, which is currently at the stage of many researchers exploring the method through their trial and error approach as following: Creeping motion acquisition based on modification through initial motion through genetic algorithm searching [17, 18], swinging behavior achievement based on the sensor-guided methodology by genetic algorithm based modification of the neural network whose input is sensor value, such as gyroscope and accelerometer and output is actuator state [19], achievement of stepping motion based on sensor reflex [20] and auto-tuning methods of its reflex control parameter in the real world [21], pedaling motion acquisition by modification of force control parameter through trial and error in the real world [22]. Narioka et al. realized creeping behavior by pneumatic tendon-driven musculoskeletal robot based on on-line optimization of CPG parameters [23].
In addition, by constructing hierarchical sensor feedback structure which consists of combination of spinal cord reflex and voluntary movement like human control structure(Figure 14, robust control method against the error between the control model and the real robot body is proposed [24, 25], such as keeping balance as shown in Figure 15 and dynamic ball catching. Further, in order to achieve these musculoskeletal humanoid behaviors, it is important to maintain a continuous long-term operation by using its complex physical body. The following are key technologies in supporting the achievement of these musculoskeletal humanoid movement.

Proposed balancing approach for musculoskeletal humanoid

Demonstration of Kojiro bending/extending motion using its hip and spine joints with proposed balancer
4.1. Joint posture estimation methodology
It is a difficult task to obtain joint posture of a musculoskeleltal humanoid which has complicated bone structures like human body. Mainly two methods are proposed to detect musculoskeleltal robot's joint posture. The one is joint posture estimation from muscle-tendon information, and the other is to measure directly joint posture by newly developing bone posture detection sensors.
In tendon-driven robots, one joint posture can has redundant actuators status, which means that actuator status can be underspecified from one joint posture status. Length set of tendons in a joint angle is easily obtained by calculating geometric paths (i.e. backward kinematics), however, it is difficult to obtain joint angle from length set of tendons (i.e. forward kinematics). The relationship between joint angle
In addition, by focusing on nonlinear relationship between this joint angle and tendon length as shown in Figure 16, joint posture estimation method by using only tendon velocity component information is proposed [26]. This method enables to estimate joint posture from tendon length information while humanoid moving without the calibration task to detect base posture. Figure 17 is the flowchart of this estimation method. These estimation methods from tendon length information are suitable joint angle acquisition approach for complicated joint, such as spherical joint structures in human body. However, they have the problem that it is difficult to estimate precise joint angle due to tendon elongation and fracture.

Joint pose estimation in the case of a simple joint structure

Flowchart of the proposed joint estimation algorithm
On the other hand, we have also developed sensors which detect directly posture of a spherical joint, such as the sensor by using magnetic field change [27] and the sensor by tracking spherical surfaces pattern by using tiny camera which is used as cellular phone camera as shown in Figure 18 [28].
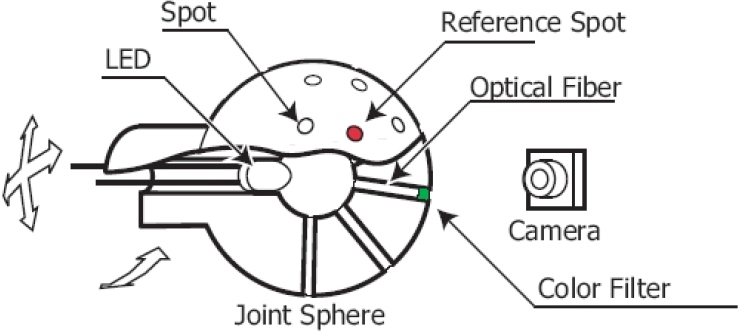
Sensor for spherical joint using a small camera
4.2. Wearable suits based on muscle actuator units
In order to reinforce muscle and re-configure muscle arrangement after developing humanoid, reinforceable musculoskeletal humanoid Kotaro was designed. For achievement of this reinforceable muscle concept, muscle actuator is developed as a unit which can be independently actuated [9, 29]. This muscle actuator unit has tension sensor built-in, and it can control tendon tension based on its sensor on 1 [kHz] cycle. Tendon tension control with constant goal tension force has been used to teach and playback musculoskeletal humanoids' postures and motions [30].
By using this muscle actuator unit, we developed the wearable manipulation suit [31] as shown in Figure 19. This suit is basically a lacrosse protector, where 24 muscle actuator units are arranged across spine and arm joints. By controlling all units based on goal tension value, each muscle unit's tendon length is automatically changed to fit according to wearer's posture. By estimating wearer's posture from each muscle unit tendon length information and sending wearer's posture to the musculoskeletal humanoid as goal posture, the wearer can easily manipulate and navigate the robot. Vice versa, by modifying goal tension value of muscle units on the wearable suit according to the tension sensor value on the navigated robot, the wearer can feel robot's reaction force from environment. Figure 20 shows muscle tension transition in the navigated robot (the left) and the wearer (the right) sides. By this bilateral-navigation-control system, the wearer can teach not only robot motion and also reaction force in its hand, which is very useful to achieve behaviors with contact to environments, such as wiping table (Figure 21) and so on.

The wearable device using muscle acuator modules

Tension of robot and wearable device during table cleaning motion

Motion control by a wearable device using muscle actuator modules
4.3. Wholebody distributed motor-sensor control system
In super multi degree of freedom musculoskeleltal humanoid with over 100 actuators and 500 sensors, it is necessary to deal with large number of these sensor-motor information efficiently. Base concept of information communication structure is the distributed motor-sensor control system, where distributed small processors individually control local actuators and collect local sensors on real-time 1 [kHz] cycle, and central main processor communicates with each distributed processor on slower 100 [Hz] cycle [32].
Firstly, we developed the small motor driver board (36 [mm] × 46 [mm]) which can drive 4 axes DC4 [W] motors and continuously generate 5 [A] and each motor drivers communicate with main central processor through USB communication [33]. In these large distributed control system, it is important to visualize whole sensor-motor control status to detect disordered parts and prevent breakdown. Actually we developed visualization system [34, 35] as shown in Figure 22. And also, it is important weight power ratio in the robot actuating system. From Kojiro robot, we have adopted high-power motor driver, which instantly drives motor with over its rating power based on motor inner coil's thermal estimation [12]. Thanks to this high-power driving system, Kojiro can generate instantly 10 times greater power than older robot Kotaro. Actually we developed new motor driver H8-18 based on this thermal control methodology. H8-18 is equipped with microcomputer H8S/2215 of Renesus Technologies Ltd. Co.A˛fs make and FPGA Cyclone III of Altera Inc.A˛fs make. With H8S/2215 and FPGA being interconnected by a bus, H8S/2215 communicates with the host computer via USB (12 Mbps) and FPGA performs communications on RS485 with LTC2854 the same way as FPGA-01D. Figure 23 shows H8-18 and communication diagram and other systems that are used for driving. Assuming that a maximum of four boards should be connected per H8-18, communication speeds of RS485 have been set to 3 MHz and data are exchanged through asynchronous serial communication. This new board is adopted by our robots Kenzoh (in section 3) and Kenshiro (in section 5).
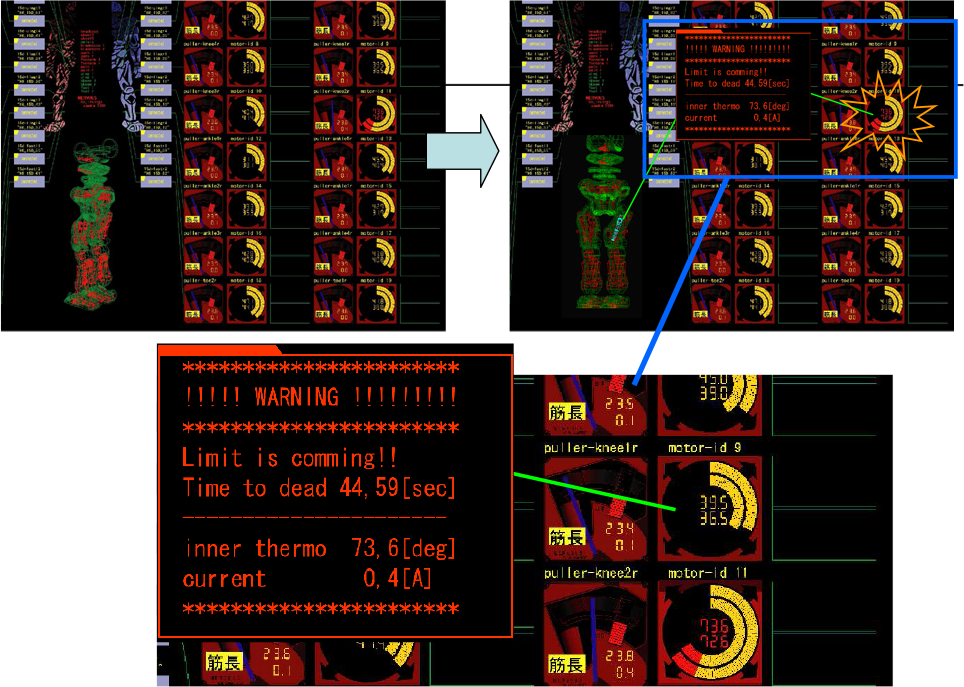
Example of warning on robot information viewer

Communication configuration
5. Challenge to realize a musculoskeletal humanoid as a human body simulator
As we mentioned above, we have developed and controlled complicated musculoskeletal humanoids, which have about 70 DOFs joints comprising a spine, a scapula and collarbone joint, and over 100 redundant tendon actuators.
However, these robots are designed by changing and simplifying the tendon arrangements and bone shapes of these robots as compared to human body, due to limitation of implementation technology, especially bone materials and actuator systems. They are also inadequate as a detail human body simulator in the real world.
Therefore, in order to solve these problems, we are now newly developing a musculoskeletal humanoid, which is named “Kenshiro” (see Figure 24). Kenshiro imitates human body with great accuracy, such as especially following points:

Musculoskeletal humanoid Kenshiro
Weight ratios and sizes of each bones/limbs
Muscle arrangements and joint arrangements
Muscle output power
The goal of this robot is the achievement of both 1)very humanlike joint and muscle arrangements and 2)actuator performances for fullbody motion.
5.1. Human bones imitation in weight and sizes
Figure 25 shows kenshiro specification. Kenshiro is designed so that its height becomes shortest as long as it can contains 100 new actuators. Finally, the height of Kenshiro will be in the order of 158 [cm] and it weight approximately 50 [kg]. This corresponds to almost Japanese 12 aged boy's height and weights according to the statistical data by Japan government 3 . Each bone link's size and weight are determined by proportionally converting the statistical data (size-JPN 2004-2006) 4 of Japanese young man with 170cm tall, which is published by NEDO 5 , to the goal height 158cm.

Outline of Kenshiro as a detail human simulator robot
5.2. Human joint arrangement imitation
Kenshiro has 64 joint DOFs except hands DOFs, which consists of a neck 13 DOFs, each arm 13 DOFs, each leg 7 DOFs and spines 11 DOFs, as shown in Figure 25. In these joint structures, especially its spines and knee joint is different form conventional musculoskeletal humanoids' ones.
Conventional spine structures before Kenshiro are designed as from 3 to 10 series articular joint structures, of which each joint is implemented as 3-DOFs spherical joint mechanism. However, in actual human body, the spine joint movable range has aeolotropies. For example, human 12 series thoracic vertebrae can rotate ±20 [deg] in roll axis, from +45 [deg] to −40 [deg] in pitch axis and ±35 [deg] in yaw axis, and also human 5 series lumbar vertebrae can rotate ±20 [deg] in roll axis, from +60 [deg] to −20 [deg] in pitch axis and ±5 [deg] in yaw axis [36]. According to this anatomical data, we can regard that human lumbar vertebrae seldom contribute yaw axis rotation. Therefore, in Kenshiro's spine structure, lumbar vertebrae is designed as a 5 series articular joint structure, of which each joint is 2 DOFs mechanisms which can rotate in only roll and pitch axis and cannot rotate in yaw axis, as shown in Figure 26. A chest is designed as a solid construction with no movable parts. Inside of chest part, 30 actuators to drive arms, lumbar vertebrae (i.e. spine) and cervical vertebrae (i.e. neck) must be embedded. If thoracic vertebrae moved, we would have had to solve the problems of interferences between chest bones (i.e. costal bones) and 30 actuator systems within chest part. This problem is very difficult to solve, therefore, at present, we designed Kenshiro's chest as one solid part by fixing each thoracic vertebrae joints. However, Kenshiro's chest consists of 12 thoracic vertebrae similar to actual human chest. We aim to realize movable chest part in near future by unfixing each thoracic vertebrae.
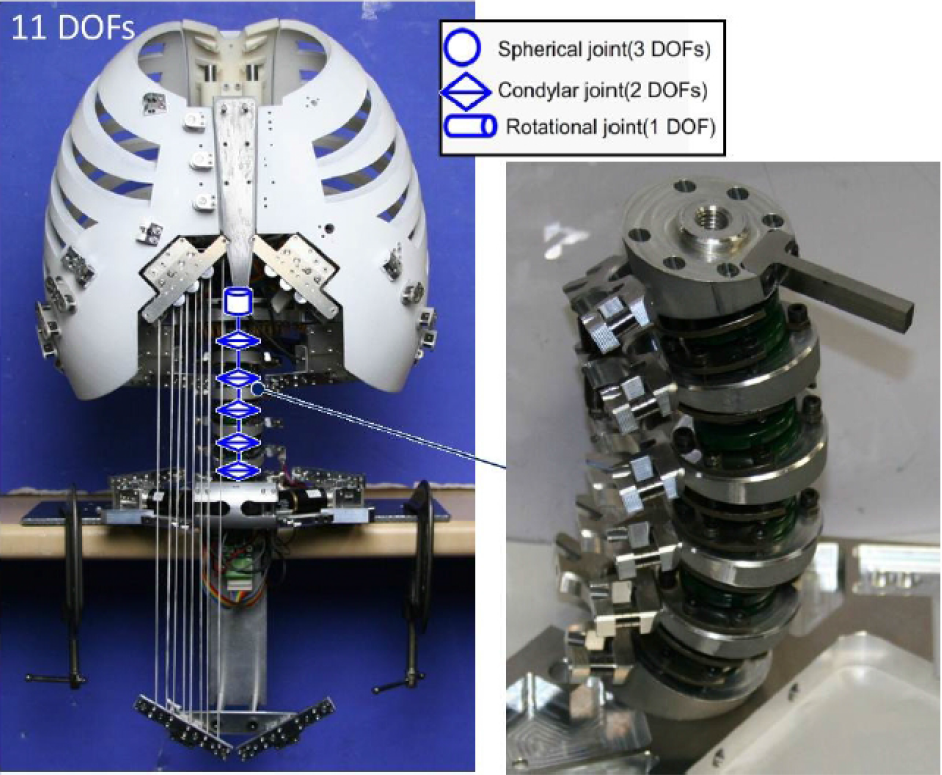
Kenshiro spine joint arrangement
And also Kenshiro has one DOFs rotational joint in yaw axis, between the bottom of its solid chest part and the top of lumbar vertebrae. With these approximations, Kenshiro's spine will achieve approximately the same range of movements of humans.
Conventional knee joints before Kenshiro are designed as simple rotational joints or rolling joints, however, the human knee joint mechanism is much more complicated. Etoundi et al. developed a knee joint which has parallel linkage structures as human cruciate ligaments [37]. Kenshiro's knee has also parallel linkage structure and, in addition, a floating bone as a patella. And also Kenshiro's knee structure enables to achieve a screw home movement, which is the human knee's typical movement. Human knee can be twisted when its knee is bent, and also it cannot be twisted when it is extended. It means human knee's movable range around twisting axis depends on its bending angle. Figure 27 shows Kenshiro's knee mechanism.
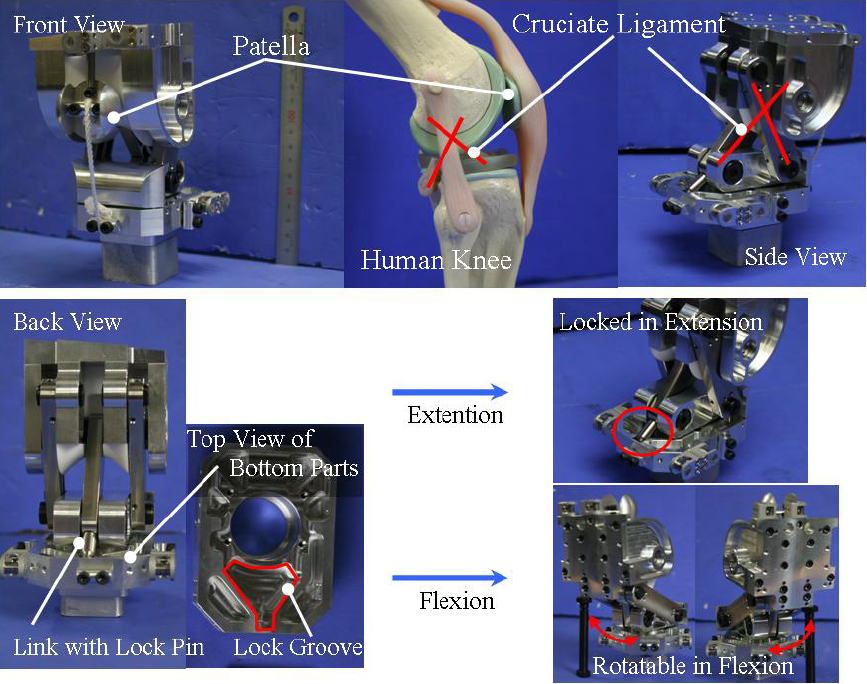
Kenshiro knee mechanism
5.3. Human muscle arrangement imitation
The muscle arrangement of Kenshiro imitates human main muscle arrangements as shown in Figure 25. Especially, geometric positions of muscle insertion points (i.e. beginpoints and endpoints) in bones are precisely imitated based on real human anatomical bone data model. And also we design as similar bone shape to human's as possible, because outer shapes of bones have influence on interference between bone surface and muscle tendons.
Finally, Kenshiro has more muscles, that are also better arranged than previous musculoskeletal humaniod robots. Actually, it has 102 muscle actuators except head, neck and hands, and 160 muscles, which consist of 50 muscles in its legs, 76 muscles in its trunk part, 12 muscles in its shoulder and neck parts and 22 muscles in arms. In Kenshiro, the number of DOF is more than the number of actuators. This is because that we adopt a planar muscle mechanism as Kenshiro's muscle in trunk body, such as its abdominal muscles, latissimus dorsi and so on. Planar muscle mechanism enables to move several muscles by only one actuator by using moving pulley.
5.4. Muscle power improvement for fullbody motion
Except 8 muscles for wrist drive, all 94 muscle actuators consist of Maxon 100 [W] AC motors, therefore, total rated power output of Kenshiro becomes about 10000 [W] and rated power output per unit mass becomes about 200 [W/kg]. Actually, Kenshiro total rated power output corresponds to as 5 times as Kojiro's one. Kojiro is the previous musculoskeletal humanoid we developed in 2008. It can somewhat walk, stand up, and do some fullbody motions [21, 24]. And Kenshiro rated power per unit mass corresponds to as 3 times as Kojiro's one. Actually Figure 28 shows the torque generated at the hip joint in Kojiro (blue) and Kenshiro (green). And also, Kenshiro's knee joint can generate continuous torque 116 [Nm] and noload angular velocity is 19.6 [rpm]. This specification is comparable to general fullbody axis-driven humanoid HRP2 [1, 38] which can walk.

Generating torque in Kenshiro and Kojiro hip pitch joint
Thanks to this large improvement of power output, we aim to make Kenshiro do fullbody motions, which require strong motor intensity, such as walking with humanlike spine motion, standing up motion from sitting on a chair. It is very important in order to make Kenshiro the actual human body simulator to evaluate each muscle load during walking.
5.5. Complicated and strong bone design imitating humanlike bone shapes
As mentioned above, we have to design precisely humanlike outer bone shapes, in order to imitate human muscle arrangement in not only insertion points but also tendon paths, because there are interferences between muscle tendons and outer surface of bones and this interference effects depend on clearly shapes of outer bone. In the musculoskeletal humanoids we developed so far, we build bones based on rapid prototyping processes, such as SLA and SLS and so on, to realize humanoid bones with humanlike complex curved surface shapes. However, these bone materials which can be manufactured by these rapid prototyping, such as ABS plastic resin and nylon resin, is much more fragile than metal materials, such as aluminum alloy. As a result, we have to change bone shapes to improve bone's strength. Therefore, as long as we adopt these fragile materials as humanoid structure, it is difficult to precisely imitate human bone shapes, which has many small outshoot parts and thin parts, such as a pelvis bone, vertebrae, a costal bone, a scapula bone and so on.
Therefore, almost all bone structures of Kenshiro are made of strong materials, such as aluminum alloy, steel alloy and CFRP and so on. Thanks to these materials, even humanlike small outshoot parts and thin parts can be built without any fragility. On the other hand, these metal materials are more difficult to product than the materials by rapid prototyping manufacture, especially in the complicated bone structure with humanlike curved surfaces. It means that the bones cost more. In Kenshiro, in order to reduce these bone design cost, we select manufacturing methods depending on bone shapes. Figure 29 shows Kenshiro's bone structures. For example, costal bones are produced by aluminum casting based on lost-wax process, because costal bones consist of about 30 parts and also, each part shapes are quite complicated with curved surfaces. Pelvis bone is produced by aluminum cutting work, because pelvis bone consists of only two parts (i.e. left and right part) and the complex shape consists of convex curved surfaces, which can somewhat easily be worked by cutting. Vertebra bone is also produced by aluminum cutting work by separating vertebra bone into two parts (i.e. a main joint part and a stylocerite part), of which each part can be simplified and easily worked by cutting. Two kind of collar bones are test-produced. The one is made of CFRP material, which enables to make a collar bone a long thin structure, because CFRP is more stiff than other materials, such as aluminum and steel. The other is made by metal Selective Laser Sintering, which enables to make a collar bone shape very complicated as shown in Figure 29.

Bone structures of Kenshiro
6. Conclusion
Robotics field is a frontier of autonomous system which integrates evolution of science, engineering and technology. Many young researchers have become enthusiastic in this field with ambitious dreams. Especially in this paper, we introduced studies on life-sized musculoskeletal humanoids which has humanlike really complicated body, as a research theme where researchers have to keep pursuing new intelligent robotics frontier. By setting these humanlike musculoskeletal humanoid researches as one of big theme of our laboratory, we have to keep thinking about evolution of intelligent robotics that is how to design these complicated body structure and how to manage these complicated body. It may take a long time to realize a great musculoskeletal humanoid, however, we feel that humanlike flexibility and redundancy are necessary in order to achieve a partner robot which support our life with us in future. This paper concludes that these musculoskeletal humanoids have enough potential and possibility to become a future humanoid platform in both daily assistive robotics fields and intelligence robotics fields.