
Abstract
This paper addresses the kinematics and graphical representation of the singularity configuration of a hybrid-driven cable-suspended parallel robot (HDCPR) with three translational degrees of freedom (DOFs). Applying the closed-loop vector method and geometric methodology, inverse kinematics of the HDCPR needed for singularity analysis is performed. For the sake of singularity condition calculation within the reachable workspace, the procedure utilizing analytical methodology and gradual search algorithm is presented. Simulation results demonstrate the validity of the kinematics and singularity analysis developed.
1. Introduction
Cable parallel robots (CPRs) have received increasing attention from researchers in the fields of robotics and virtual humans, due to the particular advantages of simple structure, large workspace, heavy payload, high structural stiffness and high acceleration capability [1, 2]. The inverse kinematics and singularity analysis of parallel robots (PRs) play an important role in robotics and virtual humans, which is closely related to the movement, trajectory planning, real-time control and precision. For the closed-loop CPRs, when the end-effector is located in singular configuration, the kinetostatic behaviour instantaneously changes [3]. It may cause serious problems, such as local loss of stiffness, a decrease in positioning accuracy, sudden undesirable motion, breakdown of robots, etc. [4]. Therefore, it is essential to conduct in-depth research into the singularity of CPRs.
Currently, much research has been carried out on analysing the singular configuration of PRs, which can be mainly summarized as three typical methodologies. The first type is the geometric methodology. Merlet [5,6] proposed an exact method of Grasmann's line geometry. Horin and Shoham [7] showed the Grassmann–Cayley Algebra approach to obtain a geometrical interpretation of the parallel singularities. Based on the second typical methodology, screw theory, the singularities for 3/6-Stewart PR and 5-DOF PRs have been presented by Huang Zhen, Kong and Gosselin respectively [8-12]. Though the geometric methodology and screw theory have the advantages of being simple and intuitive, it aims at PRs with identified structure or special construction. However, in practical application, it concerns the operating conditions in the entire reachable workspace of the PRs. So it is necessary to analyse all of the singularity distribution within the workspace. The third type, analytical methodology, is able to compensate for this issue faced when dealing with the first two methodologies. A comprehensive singularity analysis can be conducted by calculating the determinant of the Jacobian matrix of the PRs. Singularity classification and identification methods are carried out to evaluate the Jacobian matrix of the PRs in [13-15]. Serracin et al. [16] concentrated on finding the border that separates the positive determinant and negative determinant of the Jacobian matrix in all the configurations to define a singular configuration. Cornel Brisan and Akos Csiszar [17] studied the Jacobian matrix rank deficiency of a reconfigurable PR system with a given precision based on the singular values decomposition method. However, finding the singularities in all the configurations involves huge computation. Differing from the analytical methodology mentioned above, we combine the determinant calculation of the factors of the Jacobian matrix and linear decomposition to simplify calculation. Moreover, a new procedure using the gradual search algorithm is proposed to perform the singularities in the workspace, which is preferable for use in current robotics and with virtual humans.
Aiming at the 50-m scaled model of large radio telescopes, the authors in [1] focus on dynamic equations and analysis of the electromechanical coupling the CPR system, including actuator dynamics and the wind induced vibration control of the cable-supporting structure in a stationary position and the tracking control of the CPR. The authors also investigate the dynamic simulation of the hybrid-driven planar five-bar parallel mechanism (HDPM) based on SimMechanics and tracking control [18]. This paper deals with a 3-DOF hybrid-driven cable-suspended parallel robot (HDCPR), combining the HDPMs with the CPR, which is presented on the basis of theories of mechanism structure synthesis [19]. The aim of this study is an investigation of singularity analysis of the HDCPR. For this purpose, inverse kinematics of the HDCPR is performed using closed-loop vector conditions and a geometric methodology. In addition, inverse kinematics and singularity analysis are based on the motion trajectory of the HDCPR. The remainder of this paper is organized as follows: the inverse kinematics of the HDCPR needed for singularity analysis is performed based on closed-loop vector conditions in Section 2. Section 3 describes the singularity analysis within the workspace of the HDCPR by using analytical methodology. Simulation results are presented in Section 4. Finally, concluding remarks are summarized in Section 5.
2. Inverse Kinematics
The schematic sketch of the HDCPR is depicted in Fig.1, which consists of the CPR and three groups of 2-DOF HDPMs. The local coordinate system (o'x‘z’) is established at the bottom of the HDPM, while the global coordinate system (OXYZ) is established at the bottom of one cable tower rack. The distance between the origin oi and O is a. The total length of the entire cable is L0. For each cable, one end is connected to (mounted on) the end-effector G (x,y,z), the other one rolls through a pulley fixed on the top of the relative cable tower rack Pi(xi,yi,zi) and then is fed into the HDPM, with i=1,2,3. The cable tower racks have the same height h and are placed on the three corners of an equilateral triangle with side length b. The distance between each cable tower rack top and the end-effector is Li. It should be noted that the cable is treated as a massless body with no deformation and the end-effector is regarded as a point.

Schematic sketch of the HDCPR
The kinematic model of the ith group of the HDPM is shown in Fig.2. The actuated revolute joint points Ai and Ei are attached to the ground to reduce the inertia of the mobile parts. Link AiBi is driven by a constant velocity (CV) motor, while link DiEi is driven by a servomotor. The passive revolute joints are located at Bi and Di, and the joint Ci is the output.
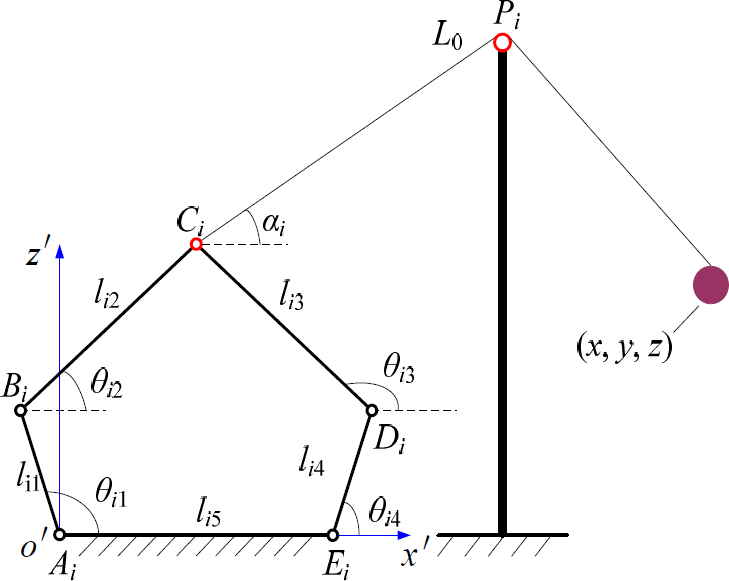
Kinematic model of the HDPM
According to Fig. 2, based on the vector chain method, the closed-loop polygon vector equation of the first group of the HDPM can be expressed as

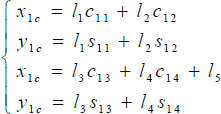
Assuming that the links have the same density and the centroid is in the centre of links. Let the length of the links be l1, l2, l3, l4, l5 and the angle between links and x'-axis be θi1, θi2, θi3, θi4, 0°, respectively. (xic,yic) is the position coordinates of the joint Ci in the local coordinate system o'x‘z’. Eq. (1) can also be written in the plural form

Let sij=sin θij and cij=cos θij, with i=1,2,3, j=1,2,3,4. Developing Eq. (2) into real part and imaginary part, respectively, we have
Eliminating the driven angular displacement θ12, θ13 in Eq. (3), the constraint equations of the HDPM can be obtained as

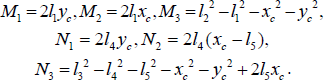
Therefore, from Eq. (4) the inverse kinematic solution for the HDPM can be expressed as

where
Referring to the geometric relationship of the CPR presented in Fig. 1, the constraint equations of the CPR can be obtained as

By solving Eq. (6) the forward kinematics equations of the CPR is as follows

Hence, the inverse kinematics solution for the CPR can be written as

As shown in Figs. 1 and 2, the relation between the first groups of the HDPMs and the CPR can be expressed as

Let α1 denote the angle between the cable beyond the CPR and x'-axis, Eq. (9) can rewritten as
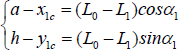
Substituting Eq. (3) into Eq. (10) leads to

Hence, the θ12,θ13 may be solved by

where

Combining the kinematics analysis of the HDPMs with CPR, for the HDCPR, when the trajectory of the end-effector and the velocity of the CV motor is determined, θi1, θi2, θi3, θi4, xic, yic, Li can be derived, which is the basis of the singularity analysis.
3. Singularity Analysis
Considering the constraint equations obtained above, analytical methodology based on the Jacobian matrix can be used to locate singularity regions within the workspace of the HDCPR.
In practical application the operating conditions in the entire workspace of the HDCPR need to be considered. Besides, the importance of the workspace is highlighted from the point of view of the main design criteria for the orientation mechanism. Firstly, the workspace analysis of the HDCPR is now briefly recalled.
For the configuration of the HDPM, as shown in Fig. 2, inequality for the joint Ci can be written as Eq. (13) completed by the constraint for the rotational joint

where lAiCi, lCiEi is the distance between the revolute joint point Ai and the joint Ci, Ei and Ci, respectively, with i=1,2,3.
From Fig. 1, the length of the cable Li inside the CPR cannot exceed the maximum. In addition, all positions of the end-effector G(x,y,z) must lie inside the space of the regular triangular prism bounded by three cable tower racks. These constraint conditions can be evaluated as
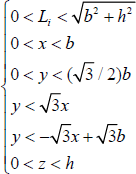
Let Ti denote the driving force of the ith cable exerted on the end-effector, m denote the mass of the end-effector and g denote the acceleration of gravity. In terms of dynamic equations, Eq. (15) based on the Euler equation of Newtonian mechanics, is valid only for Ti > 0, i.e., the cables are in tension.

After obtaining the workspace of the HDCPR using the above constraint conditions, the determinant of the Jacobian matrix, det(J), is evaluated at continuous points within the workspace to check if there are singularities.
Since the three groups of the HDPMs are identical, in order to obtain the Jacobian matrix of the HDCPR, the constraint Eqs. (4), (6) and (9) can be represented as

Differentiating Eq. (16) with respect to all the variables leads to


Simplifying Eq. (17) in a compact form yields

where

The Jacobian matrix J of the HDCPR describes the mapping relation from the input velocity of the actuated joints to the output Cartesian velocity of the end-effector.
Through forward kinematics and inverse kinematics analysis in Section 2, the value of the elements in Jacobian matrix J can be computed. Considering it requires a high computational cost to find the singular configurations where it is verified that det(J)=0, we disassemble J into A0, B0, AL, BL, Aic and Bic in order to undertake analysis. Moreover, according to the expression obtained above and by omitting the determinant that is unequal to zero, the singularity equation can be written as [13]

Defining ti = tan θi1/2, using linear decomposition [20], Eq. (19) can be expressed as
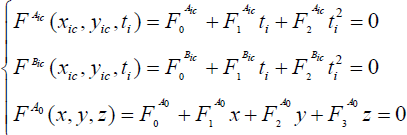
where

the coefficients FjmAic, FknBic, FuA0 with j,k,m = 0,1,2, n = 0, …, 5, u = 0,1,2,3, are functions of the kinematics parameters of the HDCPR. For a given kinematics structure, the coefficients can be calculated.
The procedure for computing the singularities within the reachable workspace of the HDCPR using a gradual search algorithm is shown in Fig. 3. It should be noted that there are three dashed rectangular frames. This paper is concerned with searching for the singularities according to the given kinematics parameters, besides, the workspace of the HDPMs determine the movement of the driven cables. Therefore, as shown in the first dashed rectangular frame, it is first necessary to calculate the workspace of the HDPMs. Then the workspace of the end-effector of the HDCPM can be calculated from the constraint conditions in the second dashed rectangular frame. Furthermore the third one represents the condition for the singularities.
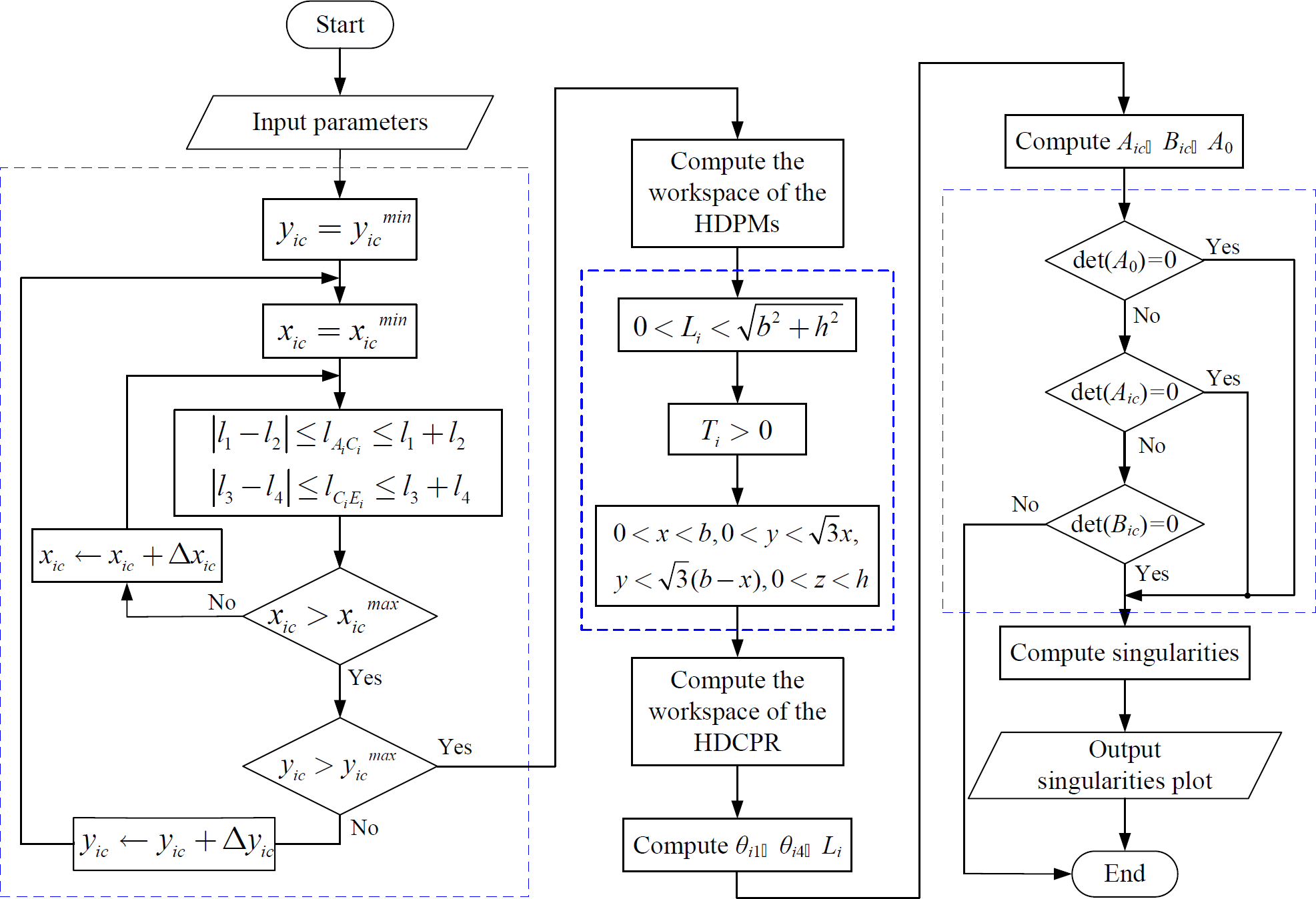
Procedure for determining the singularities within the workspace of the HDCPR
4. Results and discussion
Kinematics parameters of the HDCPR


Fig. 4 displays the trajectory tracking of the end-effector of the HDCPR and the homologous trajectory of the joint C1 is shown in Fig. 5. Figs. 6 and 7 show the changes in length of the cables and displacement of the angle θ1v, respectively, with v=1,2,3,4. From the simulation results, it can be concluded that the value change is reasonable and the transition is smooth, which justifies the inverse kinematics solutions of the HDCPR.
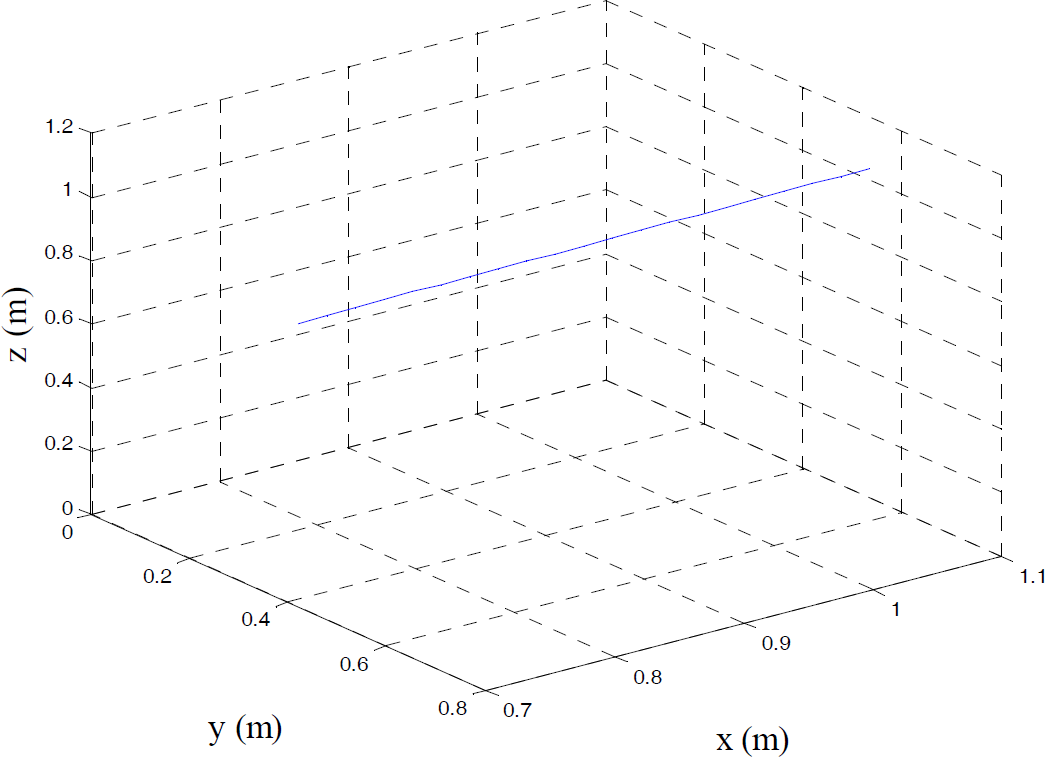
Following trajectory of the end-effector

The trajectory of the joint C1

Change in length of the cable Li

Change in displacement of the angle θ1v
The cables are driven only by coils and servomotors which is a classical approach for the CPRs. However, for the range and speed of obtainable output motions, it may be limited by certain servomotor power capacity and high cost. This problem can be solved by using HDPMs instead of coils and servomotors. For the HDPM, the CV motor provided the majority of power supply to drive the mechanism's motion and the servomotor is real-time controllable and off-line programmable. Therefore, the HDPM has the advantage of the complementary characteristics of two types of motors to generate programmable output motions with high power capacities at low cost.
The actuating power of the CV motor and servomotor of the HDPMs of the HDCPR can be calculated by
where PCVi is the CV motor power of the ith group of the HDPMs, PSVi is the servomotor power of the ith group of the HDPMs, τi1 and τi4 is the torque input by the CV motor and by the servomotor, respectively [18].
As the motion trajectory of the end-effector is the same and as the structural parameters of the classical approach for the CPR are the same, the servomotor actuating power of the CPR can be obtained by

where Pi is the ith servomotor power, Ti represents the ith cable tension, L̇i denotes the ith cable velocity [1].
Assuming density of the links is 7.85×103 kg/m3 and the cross sectional area of the links is 2×10−4 m2, Fig. 8 shows the comparison of absolute value power curves between the HDCPR and CPR. As it can be seen, the range of |PCVi| is larger than |PSVi| for the HDCPR system and the large range of the servomotor power |Pi| of the CPM may be decreased by using the HDPM.
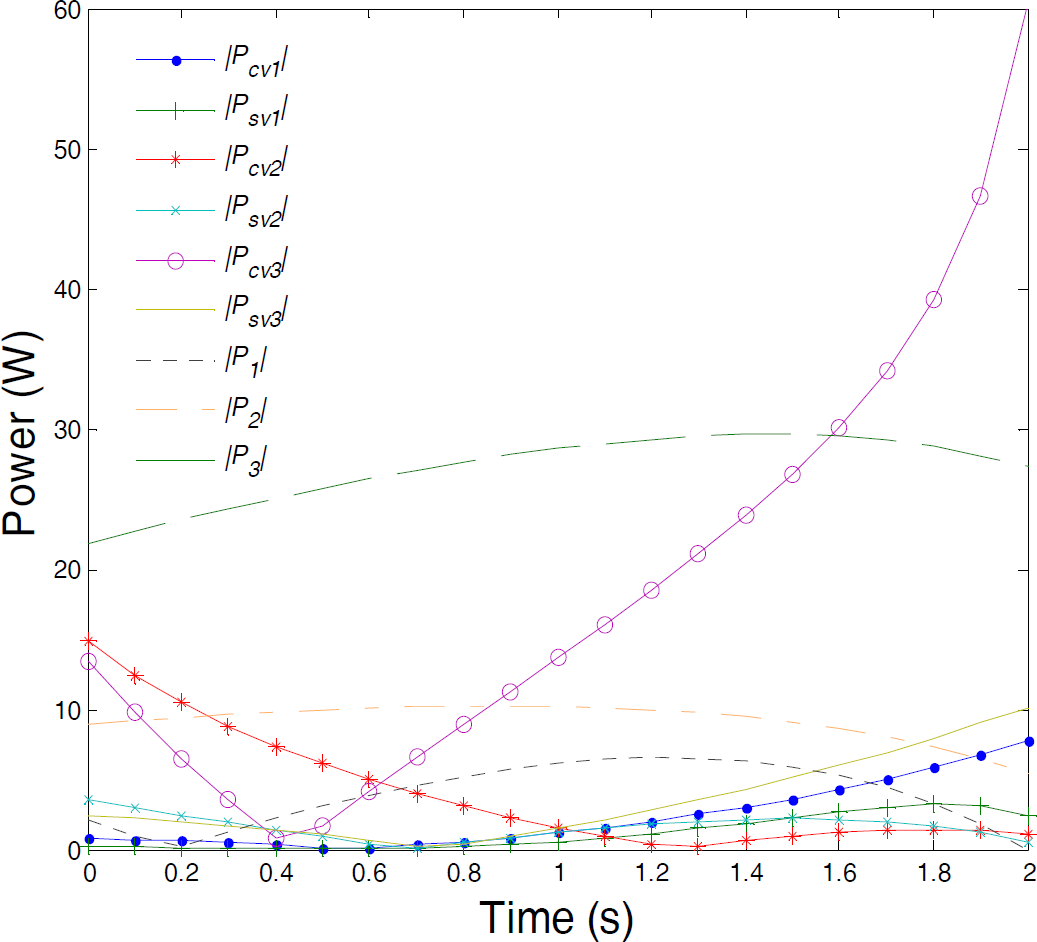
Comparison of absolute value power curves between the HDCPR and CPR
Figs. 9 and 10 display the workspace of the first group of the HDPMs and the end-effector of the HDCPR, respectively. Fig. 11 shows the singular configurations inside the workspace in 3-dimensional view and the projection in XOY plane, XOZ plane and YOZ plane, with red points for the singularity and black points for the workspace. It can be observed that the singularities are distributed in the surface on the edge of the workspace of the HDCPR. Moreover, due to the identical structure of the three groups of the HDPMs, the singular configurations are symmetrical.

The workspace of the first group of the HDPMs

The workspace of the end-effector of the HDCPR

The singularities within the workspace of the HDCPR (A) 3D view, (B) XOY plane, (C) XOZ plane, (D) YOZ plane
Taking the first group of the HDPMs for instance, Figs. 12-14 show the variational values of det(A0), det(A1c) and det(B1c) within the workspace respectively. In Figs. 12 and 13, it can be noted that many of the points are not equal to zero, but rather close to zero, which indicates that the matrix A0 of the CPR and the matrix A1c of the HDPM have no impact on the singularity. On the contrary, in Fig. 14, some points satisfy the condition det(B1c)=0. Therefore, the matrix Bic of the three groups of the HDPMs, with i=1,2,3, makes a full impact on the singularity of the HDCPR.

det(A0) within the workspace

det(A1c) within the workspace

det(B1c) within the workspace
5. Conclusions
This study focused on an investigation of singularity analysis of the HDCPR. For this purpose, inverse kinematics of the HDCPR was performed using closed-loop vector conditions and geometric methodology. Furthermore, the analytical methodology and gradual search algorithm for singularity condition calculation within the workspace were introduced based on a Jacobian matrix. The simulation results demonstrated the validity of the kinematics and singularity analysis developed, which lays a foundation for further research on optimization and real-time control.
Footnotes
6. Acknowledgments
This work was supported by the National Natural Science Foundation of China (50905179, 51275515), the Visiting Scholar Foundation of Key Lab in University (GZKF-201112) and the Six Talent Peak Foundation of Jiangsu Province and the Priority Academic Programme Development of Jiangsu Higher Education Institutions.