
Abstract
Performance evaluation is one of the most important issues in the field of parallel kinematic manipulators (PKMs). As a very important class of PKMs, the redundant PKMs have been studied intensively. However, the performance evaluation of this type of PKMs is still unresolved and a challenging endeavor. In this paper, indices that assimilate motion/force transmissibility are proposed to evaluate the performance of redundant PKMs. To illustrate the application of these indices, three PKMs with different kinds of redundancies are taken as examples, and performance atlases are plotted based on the definitions of the indices. Transmissibility comparisons between redundant PKMs and the corresponding non-redundant ones are carried out. To determine the inverse solutions of the PKMs with kinematic redundancy, an optimization strategy is presented, and the rationality of this method is demonstrated. The indices introduced here can be applied to the performance evaluation of redundant parallel manipulators.
Introduction
As an important complementary counterpart of serial manipulators, parallel kinematic manipulators (PKMs) have been studied intensively for more than twenty years for their advantages of compact structure, high stiffness, lower moving inertia, high load-to-weight ratio, high dynamic performance, and high accuracy potential. Usually, a PKM provides a stiff connection between the payload and the base, and has a complex structure in terms of its motion and constraints. These characteristics also constitute certain disadvantages, such as the relatively small workspace, low dexterity and abundant singularities. Of note is the finding that the singularity makes the limited workspace of PKMs even smaller [1]. Unfortunately, singularity exists for most PKMs. For example, the classic 3-RRR PKM [24], singular loci exist in its workspace and the singularity of this manipulator is very complex. As is well known, a manipulator works at singular configurations may create serious problems and use of such a situation should be avoided. But even so, the properties such as stiffness and accuracy deteriorate quickly when working at near singular configurations.
The most feasible methods for dealing with singularity avoidance and singularity-free workspace enlargement are to use actuation or kinematic redundancy [35]. Redundancy can, in general, improve the ability and performance of PKMs [2, 6, 7]. Actuation redundancy means that the mobility of a manipulator is less than the number of its actuated joints, while kinematic redundancy means that the mobility is greater than the degrees of freedom (DOFs) needed to set an arbitrary pose of the mobile platform [4, 6, 8].
Recently, redundant actuation of robotic manipulators [7, 912] and machine tools [13, 14] has become a field drawing active research. Actuation redundancy consists of two categories: the activation of passive DOFs in the joint space, and the introduction of new and active DOFs in the joint space [15]. Actuation redundancy in PKMs can decrease or eliminate singularity, increase manipulability [15], increase payload and acceleration of the mobile platform [16], further improve the efficiency and reliability by eliminating actuator singularity or force-unconstrained configurations [4,17], and improve the repeatability by controlling the direction of the internal forces to reduce the effects of joint backlashes [18]. Actuation redundancy can improve the transmission properties and yield an optimal load distribution among actuators by increasing the homogeneity of force transmission and manipulator stiffness [16]. It can also optimize the actuator torque and make up the actuator fault [19, 20]. Force-moment capabilities of redundantly actuated planar PKMs were investigated by appropriately adjusting the actuator outputs to their maximal capabilities, as described in Ref. [21]. Actuation redundancy is used to eliminate singularity and improve the orientation ability of Eclipse in Ref. [22].
Actuation redundancy also has its own inherent drawbacks. It causes challenging internal force problems, i.e., the force inverse problem no longer has a unique solution, which will lead to deformation or even material failure if not tackled appropriately [2, 17].
As a counterpart of actuation redundancy, kinematic redundancy has been widely studied in serial manipulators, and the focus has been diverted to PKMs of late. Kinematic redundancy can improve the ability and performance of a PKM by changing the geometric parameters of the PKM instead of its basic structure. Due to the extra DOFs, kinematically redundant PKMs are inherently capable of more dexterous manipulation [23], and can not only execute the original output task but also perform additional tasks such as singularity elimination, workspace enlargement, dexterity improvement, obstacle avoidance, force transmission optimization and unexpected impact compensation [2, 6, 7].
However, the PKMs with kinematic redundancy are more structurally complex in terms of design. This complexity makes it difficult to guarantee a working process with high precision and high dynamic performance, and it is also difficult to control because a motion-planning algorithm is needed to choose the most desirable configuration from the infinite possible configurations that satisfy the constraints of mobile platform [23]. Moreover, in order to achieve real-time control performance, this process must be calculated efficiently [23], but it is very difficult to realize in practice due to the structural complexity, and therefore, sometimes, actuation redundancy instead of kinematic redundancy is used to avoid this difficulty in control [24]. It is important to note that the inverse kinematics of a PKM with this kind of redundancy is no longer unique, which is the main barrier that needs to be removed from the control process. Moreover, to achieve the mentioned potentials of kinematic redundancy, an appropriate optimization method of determining the inverse kinematics is required. Aiming at solving this problem, the concept of a single, discrete, and continuous optimization, which is based on the maximization of the determinant of Jacobian matrix, was proposed in Ref. [25]. However, the study in Ref. [26] showed that the dimension of Jacobian matrix does not conform in a PKM with translational and rotational DOFs. Therefore, this optimization strategy needs reconsideration. In this paper, a new optimization method, based on the locally optimized idea, will be suggested to be used in the generation of optimal inverse solutions for a PKM with kinematic redundancy.
The two types of redundancies have their own application fields, and utilizing the advantages while avoiding the drawbacks is the essential pursuit of designers.
Optimal kinematic design is always an important and challenging subject in designing PKMs due to the closed-loop structures, and this problem becomes more complex with the introduction of redundancy to non-redundant PKMs. In general, there are two issues involved: performance evaluation and dimension synthesis. Dimension synthesis involves determining the lengths of links of PKMs, which is a fundamental as well as challenging process for the design. In the field of performance evaluation, the popular local conditioning index (LCI) is unsuitable for application in PKMs with mixed type of DOFs [26], and it is also defective when applied to the planar PKMs with only translational DOFs [27]. A local transmission index (LTI), based on the transmission angle, was proposed by Wang et al. [27] to evaluate the motion/force transmissibility, which is limited in planar non-redundant PKMs or non-redundant PKMs with decoupled property. Based on the virtual coefficient of screw theory, Chen et al. [28] proposed a generalized transmission index as an index to evaluate the transmissibility in one limb of a non-redundant PKM, and only the output performance was considered. Thereafter, Wang et al. [29] updated the definition of LTI based on the concept of reciprocal product of screw theory, which considered both the input and output motion/force transmissibility and evaluated the motion/force transmissibility of all non-redundant PKMs. To the best of our knowledge, the majority of contributions focus only on the non-redundant PKMs [2732] in the domain of optimal kinematic design, the research on the evaluation of motion/force transmissibility of redundant PKMs, which is an important and interesting issue to be figured out for their promising potentials and vast application prospects, has not been reported yet. This paper attempts to make some contributions to this field.
The remainder of this paper is organized as follows. The next section, firstly, clarifies the classification of redundancy, and, secondly, presents the outcomes of the motion/force transmissibility analysis within the range of non-redundant PKMs. Based on this, the motion/force transmission indices for redundant PKMs are defined accordingly. In Section 3, three PKMs with different types of redundancy are taken as examples to illustrate the application of the related indices, and the performance comparisons between the redundant PKMs and the non-redundant ones are also carried out. Conclusions are provided in the last section.
Transmission indices of redundant PKMs
Classification of redundancy
Let us assume that the DOFs of the manipulator are n, i.e., the number of the input actuators is n, the mobility of the mobile platform is m, the number of mutual interference actuators is k (i.e., any one of the k motors cannot be moved freely when the rest motors are locked), and the number of actuation-redundancy actuators is r, then, the number of redundant actuators is n-m. If n – m > 0, this manipulator is redundant. If n – m > 0 and r = n – m, this redundancy is referred to as actuation redundancy, and this type of redundancy can be classified into two categories: redundantly-actuated and branch-redundant, i.e., the activation of passive DOFs in the joint space, and the introduction of new, active DOFs in the joint space [15]. If n – m > 0 and k = 0, this manipulator is kinematically redundant. Further, if n – m > 0 and 0 < r < n – m, this redundancy is called a mixed redundancy, this type of redundancy is rarely used in practice in view of the difficulty in avoiding the inherent drawbacks of both actuation and kinematical redundancies.
Transmissibility analysis of non-redundant PKMs
Screw theory has been successfully used in the analysis of motion/force transmissibility of the non-redundant PKMs [2830], in the analysis of both kinematics and dynamics [3335], and in type synthesis [36]. It is also the mathematical foundation for indices calculation in this article. The basic concepts of screw theory have been introduced in detail in Ref. [28, 29], and can be summarized as following.
The twist and wrench screws in a manipulator can be expressed by
Based on the concept of reciprocal product or virtual coefficient of screw theory, a generalized transmission index (GTI) considering only the output transmission performance was defined in [28], which can be expressed as

and this expression has been referred to as the power coefficient in Ref. [29].
In order to evaluate both input and output transmission performance of a non-redundant manipulator, the input transmission index and output transmission index of the i-th leg based on the concept of power coefficient have been defined in Ref. [29], and can be expressed as
Consequently, the local transmission index (LTI), which was suggested to be the evaluation metric of motion/force transmissibility of non-redundant manipulators, was defined in Ref. [29] as

which is independent of any coordinate frame, and κ ∊ [0, 1].
Local minimized-transmission index (LMTI) for actuation redundancy manipulators
For this type of manipulators (r = n – m > 0), there exists mutual interference among the k actuators, and it is difficult to predict force distribution among these mutual interference actuators in advance [2, 17]. Indeed, actuation redundancy has the ability to optimize the internal forces in the device, but this cannot be realized only by kinematic optimum design. Within the scope of performance evaluation, we cannot evaluate the motion/force transmissibility exactly as we did for non-redundant manipulators. Hence, we suggest a local minimized transmission index (LMTI) to evaluate the motion/force transmissibility of the actuation redundancy manipulators, which is summarized as follows.
By removing r actuation-redundancy actuators from the k mutual interference actuators (i.e., making the r actuation-redundancy actuators passive), q non-redundant manipulators will be generated, and
From the q non-redundant manipulators, we can find a non-redundant manipulator which can transmit motion/force better than others in a given pose of the mobile platform, and take the LTI value of this manipulator as the local minimized transmission index (LMTI), which can be expressed as

This index reflects the minimum motion/force transmission performance in a designated pose of the actuation-redundancy manipulators. The larger value of LMTI indicates that the more efficient motion/force transmission would take place. According to the definition of LTI, LMTI is frame-free, and M ∊ [0, 1]. For the purpose of high speed and high quality of motion/force transmission, the most widely accepted range for LTI is (sin45°, 1) or (sin40°, 1) [27, 30]. Therefore, the corresponding limit for LMTI should be M ≥ sin45° or M ≥ sin40°. When the value of LMTI is within this range, the good motion/force transmission takes place for actuation redundancy manipulators.
There is no mutual interference actuator for kinematic redundancy manipulators (n – m > 0, k = 0), but the inverse kinematics is not unique [23], the solution set can be denoted by G, and, for any potential positions of the actuators, the value of the local transmission index, i.e., k, will be different. There exists a maximal value κg (

This index indicates the best motion/force transmission performance in a given pose of the kinematic redundancy manipulators. Similarly, the larger value of LOTI indicates that the more efficient motion/force transmission would take place, and LOTI is frame-free, Θ ∊ [0, 1]. To have good motion/force transmission performance for kinematic redundancy manipulators, the limit for LOTI should be Θ ≥ sin45° or Θ ≥ sin 40° according to Section 2.3.1.
The optimal inverse kinematic solution, i.e., g, generated here can realize the best motion/force transmissibility of a PKM with kinematic redundancy in the given pose of its mobile platform. Over a considered workspace, all the optimal inverse kinematic solutions can be determined, and these solutions can be applied in the process of control.
In order to introduce the applications of the proposed indices and demonstrate their effectiveness in the analysis of the motion/force transmissibility of redundant PKMs, three PKMs with different kinds of redundancy are taken as examples and the corresponding atlases of the indices are plotted. Based on the proposed indices and the LTI, performance comparisons between the redundant PKMs and their non-redundant ones are also presented. Due to space constraints, calculations for related indices are presented in Appendixes in detail, the main procedure and results are directly presented in the following sections.
Actuation redundancy: redundantly-actuated
In Ref. [27], we have presented the optimal design of a spatial 3-DOF parallel manipulator, as shown in Fig. 1. When this mechanism was used in a 5-axis prototype called SPKM165 [37] as a parallel module, we found that the accuracy and stiffness along the y-axis are not as good as that along other directions. To overcome this weakness, a new redundantly-actuated PKM, i.e., the joint along the y-axis is actuated, is developed, as shown in Fig. 2. Theoretically, the accuracy and stiffness along the y-axis should be better because the motion/force transmissibility along the y-axis has been improved by the introduction of actuation redundancy. To verify this, we will use the suggested index to evaluate the performance of this redundant PKM, and compare this result with that of the non-redundant one.

A spatial 3-DOF PKM: (a) CAD model; (b) kinematic scheme.
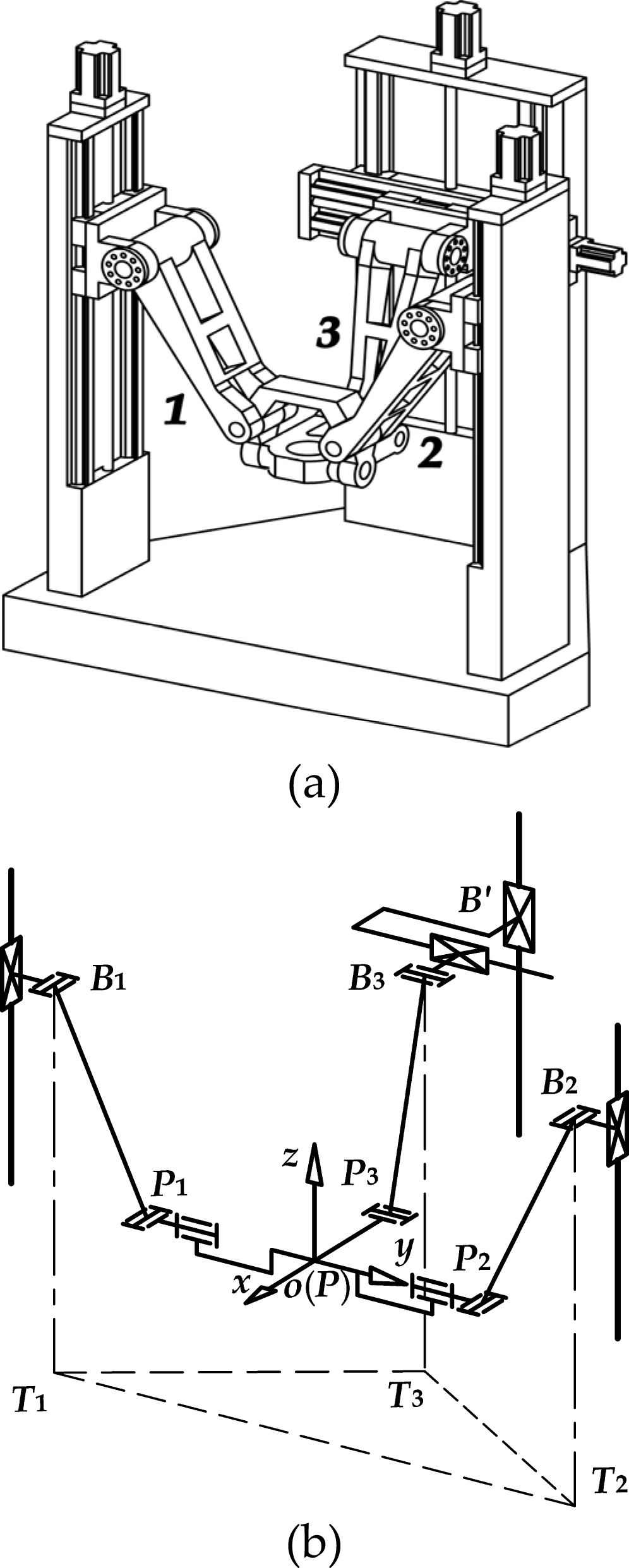
The redundant 3-DOF PKM: (a) CAD model; (b) kinematic scheme.
Here, the dimensional parameters of the two PKMs are specified as
Parameter r2 represents the distance from point P to line B3T3, then r2 = 133 mm.
For this mechanism, k = 3, r = 1, n = 4, and m = 3, then

When the PKM moves along the z-axis, i.e., three inputs are driven in synchronization with each other, the motion/force transmissibility remains unchanged. Therefore, z = 0 is assumed. With this information, the LMTI distribution atlas of the redundant PKM and the LTI distribution atlas of the non-redundant one, with respect to the practical workspace defined by y ∊ (–50 mm, 50 mm) and α ∊ (–25°, 90°), are generated as shown in Figs. 3 and 4, respectively. Due to the decoupling property of the manipulators, the distribution loci of the related indices are parallel.
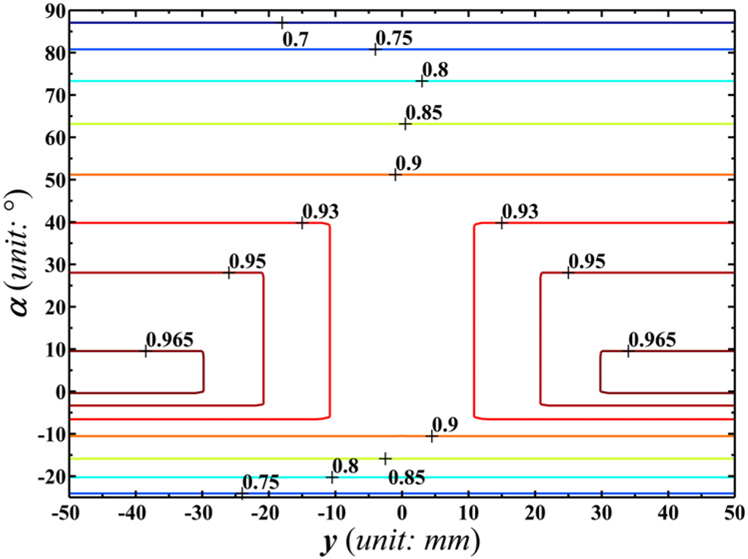
The LMTI atlas of the redundant PKM.

The LTI atlas of the non-redundant PKM.
Comparing Figs. 3 and 4, it is evident that the transmission performance along the y-axis has been improved dramatically by the introduction of redundant actuation, and this result is expected. In order to evaluate the extent of improvement of the transmissibility,

The atlas of τ in the workspace.
By this comparison, it can be concluded that the redundantly-actuated redundancy contributes greatly to the motion/force transmissibility of a manipulator.
Note that, the value of LMTI represents the minimum motion/force transmission performance, and the actual transmissibility of the redundant PKM may be better than that depicted in Fig. 3.
In this section, an extensively studied redundant 3-RRR PKM is taken as an example, as shown in Fig. 6, which has been developed by the introduction of an additional identical limb to the classic 5R PKM.

A redundant 3RRR PKM.
The parameters of this manipulator used here are B1B2 = B2B3 = B1B3 = 200 mm, B i C i = 100 mm (i = 1,2,3)and C i P = 100 mm (i = 1,2,3).
For this manipulator, k = 3, r = 1, n = 3, and m = 2, then

Actuator
Actuator

Actuator
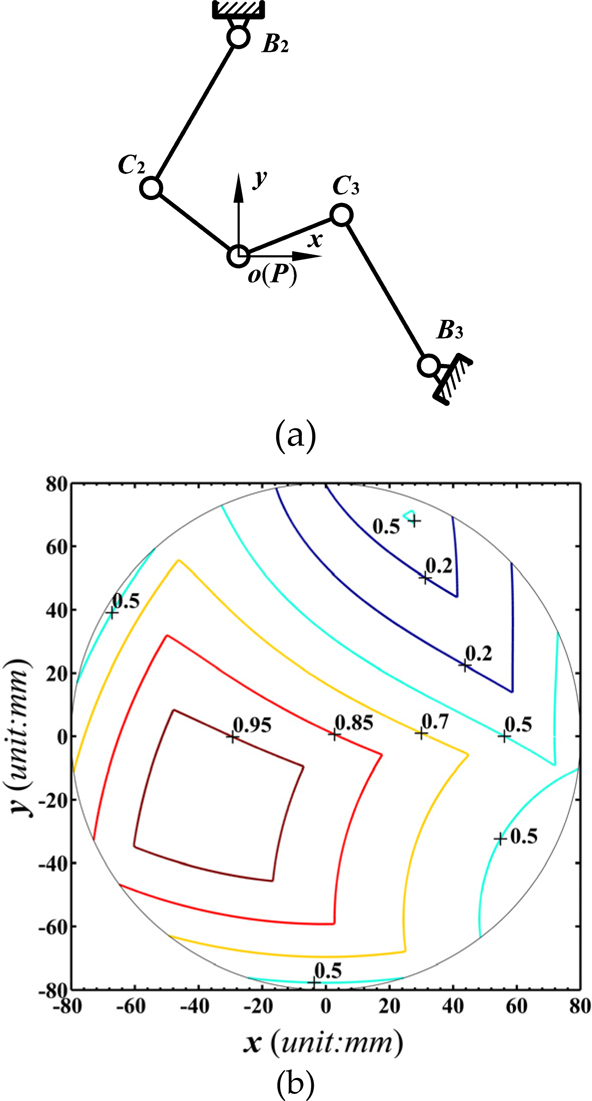
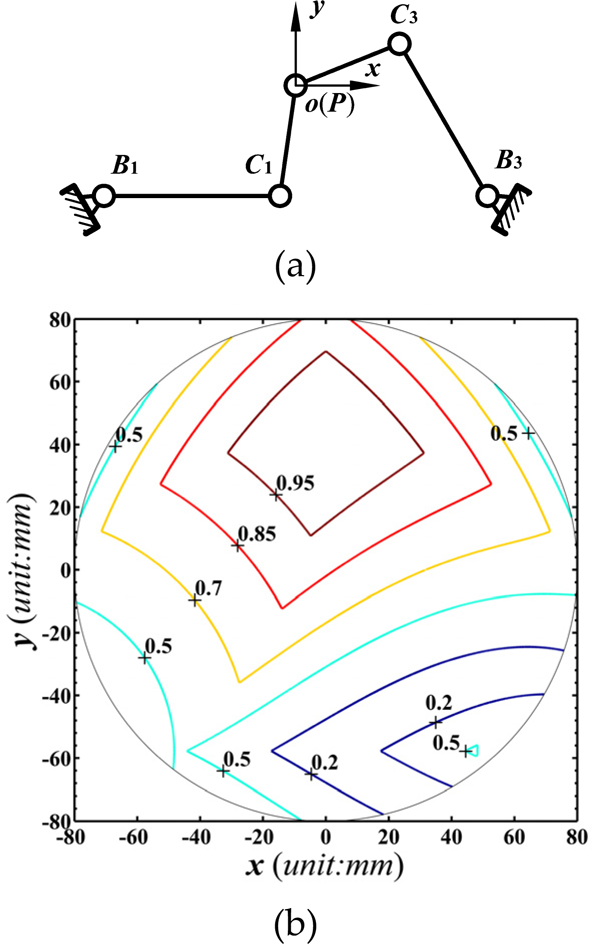
The corresponding atlases of k1, k2 and k3 have been presented in Figs. 7(b), 8(b) and 9(b), respectively, and the LMTI atlas of the redundant 3-RRR PKM is shown in Fig. 10.
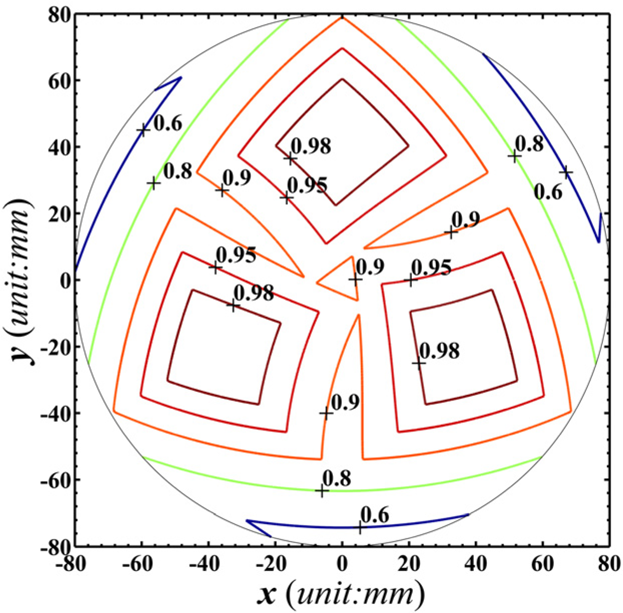
The LMTI atlas of the redundant 3RRR PKM.
Comparing the atlases shown in Figs. 7(b), 8(b) and 9(b) with that in Fig. 10, it can be deduced that the branch-redundant redundancy evidently contributes to the improvement of the motion/force transmission performance. The atlas in Fig. 10 illustrates that the distribution of the transmission performance index is more uniform in the workspace, and the isotropy of the manipulator has also been improved. Note that, the atlases presented in Figs. 7(b), 8(b) and 9(b) are actually 120° rotational symmetry, this is consistent to the configurations of the mechanisms presented in Figs. 7(a), 8(a) and 9(a).
By introducing an active slider P to the classic 5R PKM, a kinematically redundant manipulator can be generated as shown in Fig. 11, the non-dimensional parameters of the manipulator are r1 = 0.85, r2 = 1.6 and r3 = 0.55.

A manipulator with kinematic redundancy.
For this manipulator, k = 0, i.e., there is no mutual interference actuators. However, the inverse kinematics of this manipulator is no longer unique, i.e., for a given position of the point C, numerous solutions of the inputs subject to the constraints of the mechanism can be derived, and among all the potential solutions, there exists a solution g, which can make the LTI of the PKM achieve its maximum value κ
g
, then the LOTI can be expressed as

and g is the optimal inverse kinematic solution for the given position of point C. The corresponding derivation process has been elaborated in Appendix C.
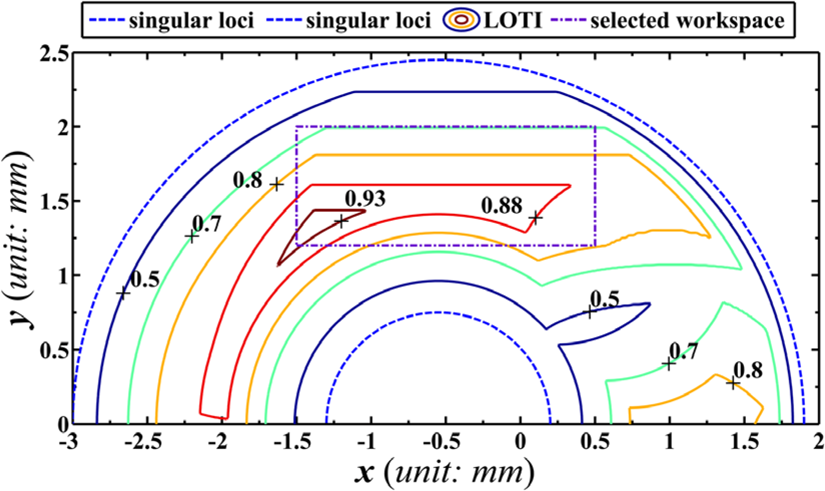
The atlas of LOTI and singular loci is presented in Fig. 12. In order to depict the effect of the kinematic redundancy, the corresponding performance of a non-redundant 5R PKM, as shown in Fig. 13, is evaluated, and the atlas of singular loci and LTI is shown in Fig. 14.

The atlas of LOTI and singular loci of the kinematically redundant manipulator.

The non-redundant 5R PKM.

The atlas of singular loci and LTI of the non-redundant 5R.
Comparing the singular loci shown in Figs. 12 and 14, it can be concluded that the singularity-free workspace has been dramatically enlarged due to the introduction of kinematic redundancy. The workspace with good transmission performance of the redundant PKM is obviously larger than that of the non-redundant PKM. Therefore, kinematic redundancy contributes greatly to the singularity avoidance, singularity-free workspace enlargement and motion/force transmission performance improvement.
Generally, the inverse kinematic solution is unique for a specific working mode of a parallel manipulator. However, in the practical application of the kinematically redundant PKM shown in Fig. 11, the inverse kinematic solution is no longer unique. An appropriate optimization strategy is necessary to determine the inverse solutions. Based on the optimization of the motion/force transmission performance, the optimal inverse kinematic solutions generated here are qualified for this task. In order to verify the rationality of this method, a rectangular workspace, as shown in Fig. 15, is considered, the positions of slider P are generated and plotted in Fig. 16.
A selected workspace.
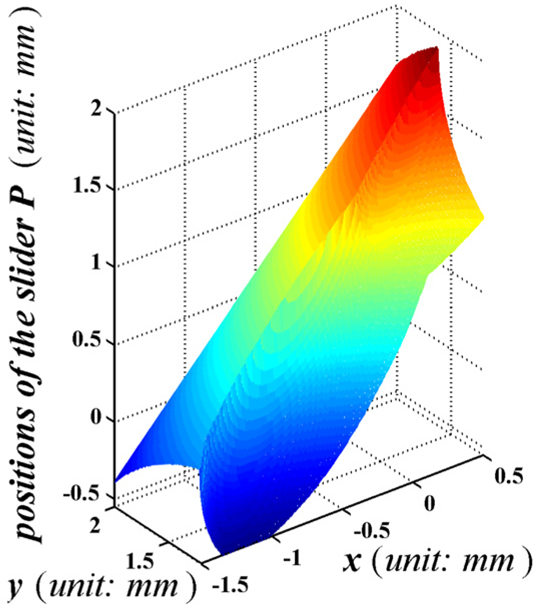
The position distribution of the slider P based on the optimization method.
The slider P moves smoothly over the rectangular workspace of the mobile platform; that is, no jumps or transient impacts occur during the locating process of the actuator. Therefore, this optimization method can be used to determine inverse kinematic solutions in the control process, and these optimal kinematic inverse solutions can maximize the motion/force transmissibility of kinematically redundant PKMs.
This article presents the classification of redundancy and briefly expounds the outcomes of the motion/force transmissibility analysis of non-redundant PKMs. Based on this, the local minimized transmission index (LMTI) and local optimal-transmission index (LOTI) are defined as the evaluation metrics of motion/force transmissibility for PKMs with actuation redundancy and that with kinematic redundancy, respectively. Aiming at determining and optimizing inverse solutions of a PKM with kinematic redundancy for the control process, the optimal inverse kinematic solution, which can realize the best motion/force transmissibility for this type of PKMs, is proposed. To illustrate the application of the indices, three PKMs with different types of redundancy are taken as examples, and the corresponding performance atlases based on the indices are presented. The comparisons, between the redundant and the corresponding non-redundant PKMs, with respect to the motion/force transmissibility are carried out. The optimal kinematic design method of redundant PKMs based on the proposed indices will be presented in our future work.
Appendix A: Indices derivation of the 3-DOF PKM with actuation redundancy Nomenclature
λ i input transmission index of limb i
η ik output transmission index of limb i when actuator Bk is removed
η ir output transmission index of limb i when the redundant actuator is removed
η rk output transmission index of the redundant actuation when actuator Bk is removed
The CAD model and kinematic scheme of this redundant manipulator are shown in Fig. 2, and the inverse kinematics can be generated as:
Given P (y, z, α) (α represents the rotational angle of mobile platform about the y-axis), and the positions of sliders B1, B2, B3 and B′ can be represented by B1


With regard to the coordinate system o-xyz, the twists and wrenches in the manipulator can be expressed by screws as follows:







where,


When the actuator B1 is removed, a new non-redundant PKM is generated. Then,



Where,
and

Then, the LTI of this non-redundant PKM can be expressed as

Similarly, when the actuator B2 and B3 are removed, respectively, the LTIs of the two non-redundant PKMs can be expressed as

and

Appendix B: Indices derivation of the redundant 3RRR PKM
The corresponding angular parameters used in this part are shown in Fig. 17, and values of these parameters can be easily derived when the position of point P is given.

The redundant 3RRR PKM.
Later, when the actuator B1 is removed, the LTI of the non-redundant manipulator can be derived as

Similarly, the other two indices, when actuators B2 and B3 are removed respectively, can be generated as


Appendix C: Indices derivation of the kinematically redundant 5R PKM
The corresponding angular parameters used in this section are shown in Fig. 18.
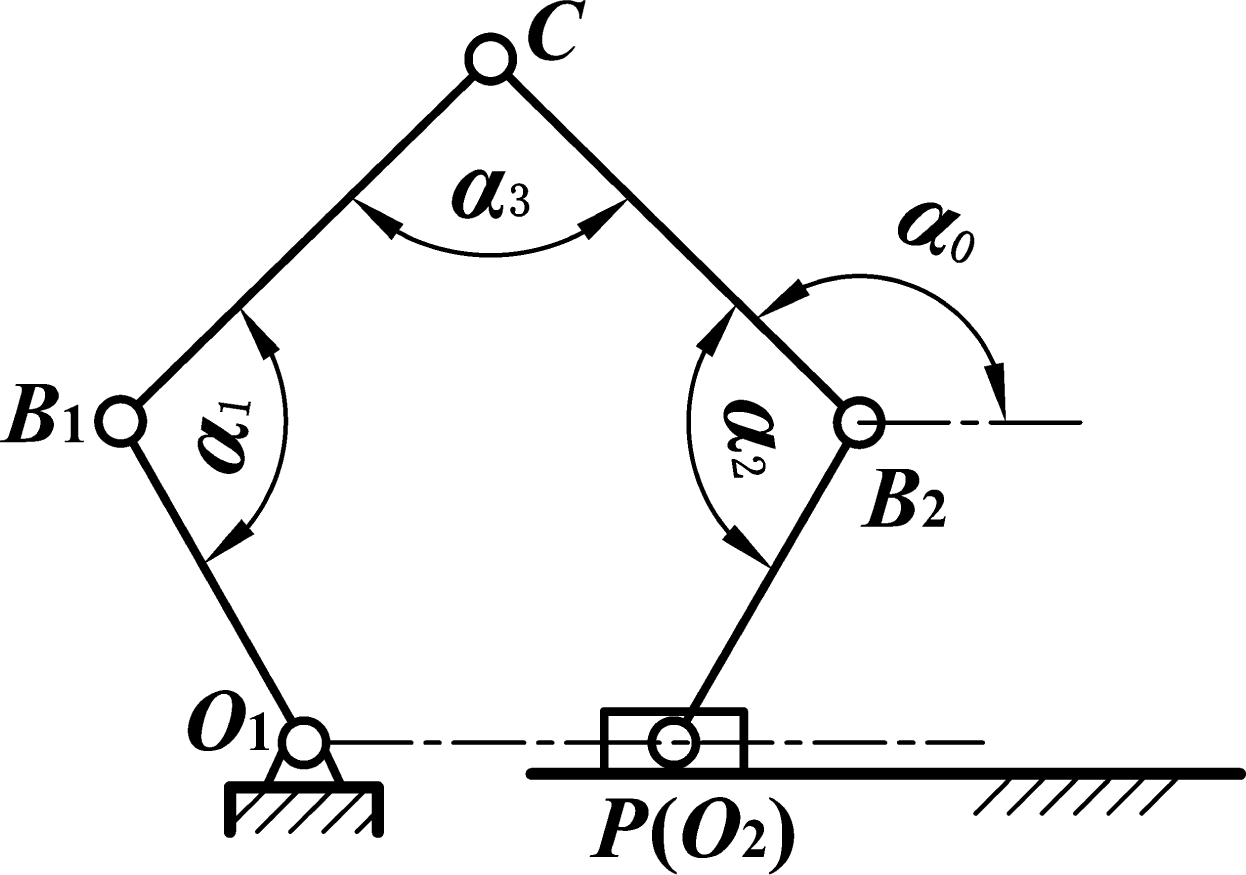
The kinematically redundant 5R PKM.
When the position of point C is given, the values of these parameters can be easily derived and positions of slider P that satisfy the constraints of the manipulator can be denoted by G. When the slider P is located at an arbitrary position Pi (Pi ∊ G), the transmission performance of this manipulator can be expressed as

In the set G, there exists a position Pj (Pj ∊ G) which makes the transmission performance of this manipulator achieve its optimal level, and this maximum value can be expressed as

Then, the optimal kinematic inverse solution is given by g = pj.
Footnotes
5.
This work was supported in part by the National Natural Science Foundation of China under Grant 51075222 and 51135008, and the Fund of State Key Laboratory of Tribology (Grant No. SKLT10C02).